
TEEm: A Tangle-based Elastic Emulator for Storing Connected Vehicle
Data in a Distributed Ledger Technology
David Werden
a
, Matthew Muccioli
b
and Anyi Liu
c
School of Engineering and Computer Science, Oakland University, Rochester, MI, U.S.A.
Keywords:
Automotive Cybersecurity, Autonomous Vehicles, CAN Bus, Distributed Ledger Technology, Hornet,
Privacy, Road-Side Units, Tangle.
Abstract:
This paper describes TEEm, a Cyber-Physical test-bed that emulates the data exchange of in-vehicle network
communication between multiple vehicles. In particular, TEEm leverages the Distributed Ledger Technology
(DLT) as the fundamental technology for data storage and exchange. TEEm uses a private Tangle instance
and is extensible, thus we refer to this testing environment as the Tangle-based Elastic Emulator, or TEEm. To
mimic realistic in-vehicle network traffic, we use both hardware emulation as well as software containers to
replicate vehicles with Electronic Control Units (ECUs). TEEm seamlessly pushes in-vehicle network traffic
to an IOTA private Tangle Hornet. Our implementation and evaluation demonstrate the feasibility of applying
the DLT in building the shared storage, authenticating vehicles, and effectively retrieving a wide range of
data generated by ECUs and other in-vehicle sensors. TEEm holds a great potential to coordinate with other
emerging technology, such as Deep Learning and Edge Computing.
1 INTRODUCTION
This paper presents the creation of a hybrid virtual
and physical environment, known as the Tangle-based
Elastic Emulator (TEEm). TEEm is used for the
testing of storing Controller Area Network (CAN)
bus message data and connected application data in
a Distributed Ledger Technology (DLT), specifically
a Private Tangle network, known as Hornet (IOTA,
2021a).
TEEm demonstrates how CAN bus message data,
along with other types of data, is easily stored in the
Hornet instance, as well as the relatively simple meth-
ods for querying that data (IOTA, 2021a). Also dis-
cussed in (IOTA, 2021a) is the extensible nature of
TEEm that allows for the easy addition of other types
of data interfaces and networks. Finally, we present
a use case describing how Hornet can be used in a
VANET to help detect Sybil attacks.
a
https://orcid.org/0000-0003-0038-1694
b
https://orcid.org/0000-0002-0822-5007
c
https://orcid.org/0000-0002-6011-1998
2 TEEm OVERVIEW
Despite being developed in 1986 by Robert Bosch,
GmbH (Bozdal et al., 2018), the CAN bus protocol
was not actively researched and targeted for cyberse-
curity attacks until the early 2000’s (Security, 2020).
This research started to get more active after 2010,
and was punctuated by the dramatic research con-
ducted by Miller and Valasek when they demonstrated
the ability to hack a vehicle in St. Louis, MO over
the internet from Pennsylvania (MIller and Valasek,
2015). Upstream Security’s report (Security, 2020)
states that there has been a rise of 99% in reporting ve-
hicle cybersecurity incidents from Year 2018 to Year
2019. It also states that 57% of incidents in Year 2019
were criminal in nature in which most common attack
vectors were remote/keyless entry, database servers,
mobile apps, and ODB-II port attacks. Recent in-
creases in research have not been limited to cyber-
security attacks and mitigations. The CAN bus mes-
saging protocol itself has also seen a increased rise in
research efforts. The CAN Bus protocol uses many
different proprietary types of messages to communi-
cate between ECUs in a vehicle. The authors of (Huy-
brechts et al., 2017) demonstrate that the the CAN
message identification can be different between even
vehicles of the same manufacturer. This means that
230
Werden, D., Muccioli, M. and Liu, A.
TEEm: A Tangle-based Elastic Emulator for Storing Connected Vehicle Data in a Distributed Ledger Technology.
DOI: 10.5220/0010990100003120
In Proceedings of the 8th International Conference on Information Systems Security and Privacy (ICISSP 2022), pages 230-241
ISBN: 978-989-758-553-1; ISSN: 2184-4356
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

knowing what CAN messages to monitor for detec-
tion purposes, or what CAN messages may be used
to cause affects on the vehicle, are different between
vehicles and must be identified for each instance. Pre-
sented in (Huybrechts et al., 2017) is the author’s tool,
which they have named CANHUNTER. Finally, be-
cause TEEm is not limited to the storage of only CAN
bus message data, it is worth noting that the differ-
ent IoT apps and devices, such as In-Vehicle Info-
tainment (IVI) systems have also in recent years be-
come a research focal area. The authors of (Mazloom
et al., 2016) discuss their analysis of IVI platforms
and vehicle-connected IoT applications.
The technological advancements and varying con-
nectivity options do more than provide the driver and
passengers with comfort, custom playlists, or hands-
free driving. These increases in technology and con-
nectivity options also increase the attack surface that
vehicles present to today’s attacker.
2.1 Key Features of Proposed
Technology
TEEm is a framework that systematically addresses
aforementioned security challenges and technical de-
ficiencies.
First, to removing the risk of a single point of fail-
ure (SPOF), TEEm stores in-vehicle network com-
munication traffic in a distributed ledger, namely the
Hornet (IOTA, 2021a). Hornet’s storage is highly dis-
tributed, such that it allows snapshots of the storage to
be kept validly across the distributed ledger. Thus, it
does not suffer from exploits that try to compromise
the central storage of the in-vehicle network commu-
nication traffic, unlike recent database hacks of Mar-
riott, Facebook, and other large companies. (Chua
et al., 2021).
Second, to ensure data integrity and authenticity,
TEEm leverages Hornet transactions to first store and
then hash the in-vehicle data in its database. Thus,
any attempt to modify or delete data in Hornet is de-
tectable and not accepted by Hornet
Third, TEEm’s extensible nature and usage of
Docker Containers (Docker, 2021a) to emulate vehi-
cle and ECU actions allow for the safe testing of pro-
totype security functions, such as a CAN-based Intru-
sion Detection System (IDS) as well as the ability to
model or baseline specific ECU behavior.
Fourth, the cyber-physical design of TEEm allows
for testing of potential threat vectors such as pivoting
from a Cellular interface to the CAN bus, as Miller
and Valasek demonstrated in (MIller and Valasek,
2015).
Fifth, TEEm is configured to provide the user with
easily accessible metrics such as system performance,
Hornet performance, and CAN bus performance and
load.
Sixth and finally, TEEm allows for the ability to
create other Hornet instances and to move Hornet
Nodes dynamically between instances.
2.2 Contributions of Proposed
Technology
TEEm is expected to make the following contribu-
tions:
• TEEm constructs a framework that emulates the
in-vehicle network traffic of ECUs. The behav-
iors of each ECU are emulated via Docker con-
tainers. We also include Arduino-based physical
components, leveraging specific target processor
memory requirements, such that TEEm emulates
physical and virtual ECUs to reproduce realistic
traffic patterns.
• TEEm’s easily captured metrics allow for a cy-
bersecurity engineer to quickly test firewall rules,
such as rules designed to identify and potentially
stop actions such as Denial of Service attempts.
• TEEm’s virtual portion and physical connections
make it an ideal environment for the prototyp-
ing of IDS technology. The virtual portion al-
lows for the quick configuration of virtual vehi-
cles, to include the limiting of access to specific
ports and/or protocols. Thus, a software based
CAN bus IDS can be connected to TEEm’s active
CAN bus interface, allowing the IDS and its rule-
set to be tested in a safe, contained, and measur-
able environment. One example of this would the
testing of rules for rate limiting on messages. To
verify that an IDS ruleset of this nature is work-
ing, traffic can be specifically and easily gener-
ated on the virtual CAN interface. Additionally,
the built-in OS tools as well as the Python lan-
guage and libraries provide mechanisms to verify
the rule (e.g., the cansniffer tool in conjunction
with a small python script can be used to deter-
mine how often a given ArbID is seen). The phys-
ical side allows for the same testing as the virtual
portion with the addition of potentially injecting
latency and noise.
2.3 Structure of This Paper
The remainder of this paper uses the following struc-
ture. Section 3 presents details of technologies used
TEEm: A Tangle-based Elastic Emulator for Storing Connected Vehicle Data in a Distributed Ledger Technology
231
for the Tangle-based Emulator described in this pa-
per, Section 4 describes the design and setup of
the Tangle-based Emulator system, and Section 6
presents the evaluation of the Tangle-based Emula-
tor, Section 7 discusses other works related to this ef-
fort, and in Section 8 we present a basic use-case for
autonomous vehicles storing and accessing data from
the Tangle network.
3 BACKGROUND
This section presents some of the background regard-
ing previous research of DLTs in vehicular security.
3.1 Previous Research of DLT in
Vehicular Security
Some of the earliest research into the usage of DLTs
in the Vehicle and Vehicle Security domains was re-
lated to the automotive insurance industry and to lo-
calization privacy.
As the authors of (Huybrechts et al., 2017) dis-
cuss, there are a large variety of OBD-II dongles pro-
vided by the vehicle manufacturers as well as 3rd-
party suppliers. These dongles provide services cen-
tered around automotive insurance services and ve-
hicle diagnostic information. As (Wen et al., 2020)
shows, these dongles are normalized to connect to the
OBD-II port and provide access to the CAN bus via
Wi-Fi, BlueTooth, or cellular networks. In (Miller
and Valasek, 2013) and their follow-up work, (Miller
and Valasek, 2014), the authors explore how to use
both the ODB-II port directly as well as through
a wireless dongle interface, to issue vehicle control
commands on the CAN bus. In 2009, the authors of
(T. W. Chim and Li, 2009) presented a scheme for
addressing the security and privacy issues inherent in
VANETs. The authors of (M. and Lee, 2011) present
PPAS, a Privacy Preservation Authentication Scheme
for V2I communications, building in part upon the
2004 work found in (Hubaux et al., 2004). The idea of
using localization nodes within a VANET while still
preserving privacy was presented as the L-P2DSA
scheme by the authors of (Mekliche and Moussaoui,
2013) in 2013. In 2015, we again find research related
to location privacy protection presented by the authors
of (Tyagi and Sreenath, 2015) and in 2018 a new type
of attack, using trajectory and route planning of au-
tonomous vehicles, was presented in (Banihani et al.,
2018), where they make the claim that, at the time of
their writing, over a decade of research into localiza-
tion and privacy issues had already been conducted.
However, research into the use of DLT in regards to
vehicle security and privacy concerns started in 2017
and specific examples of this research are presented
in Section 7.5.
4 SYSTEM DESIGN
In this section, we first present an overview of the ar-
chitectural design of TEEm and the justification for
each of three primary components. Next, we discuss
specifics regarding each item of hardware and soft-
ware items used. We then present how we have set
up and configured the TEEm networks, Hornet, CAN
bus functionality, and the necessary Docker images.
Finally, we present how the ECU containers are run,
the creation of the Arduino-based emulators, and stor-
ing CAN bus message data in Hornet.
4.1 System Architecture
In Sections 1 and 2 we presented the purposes of
TEEm: 1) to test the storage and retrieval of CAN bus
messages and other vehicle network data in a DLT, 2)
the ability to query and use the data stored within the
DLT, and, 3) the ability of the DLT to protect stored
data, such as PII or billing information. In order to ac-
complish those purposes, TEEm was designed, from
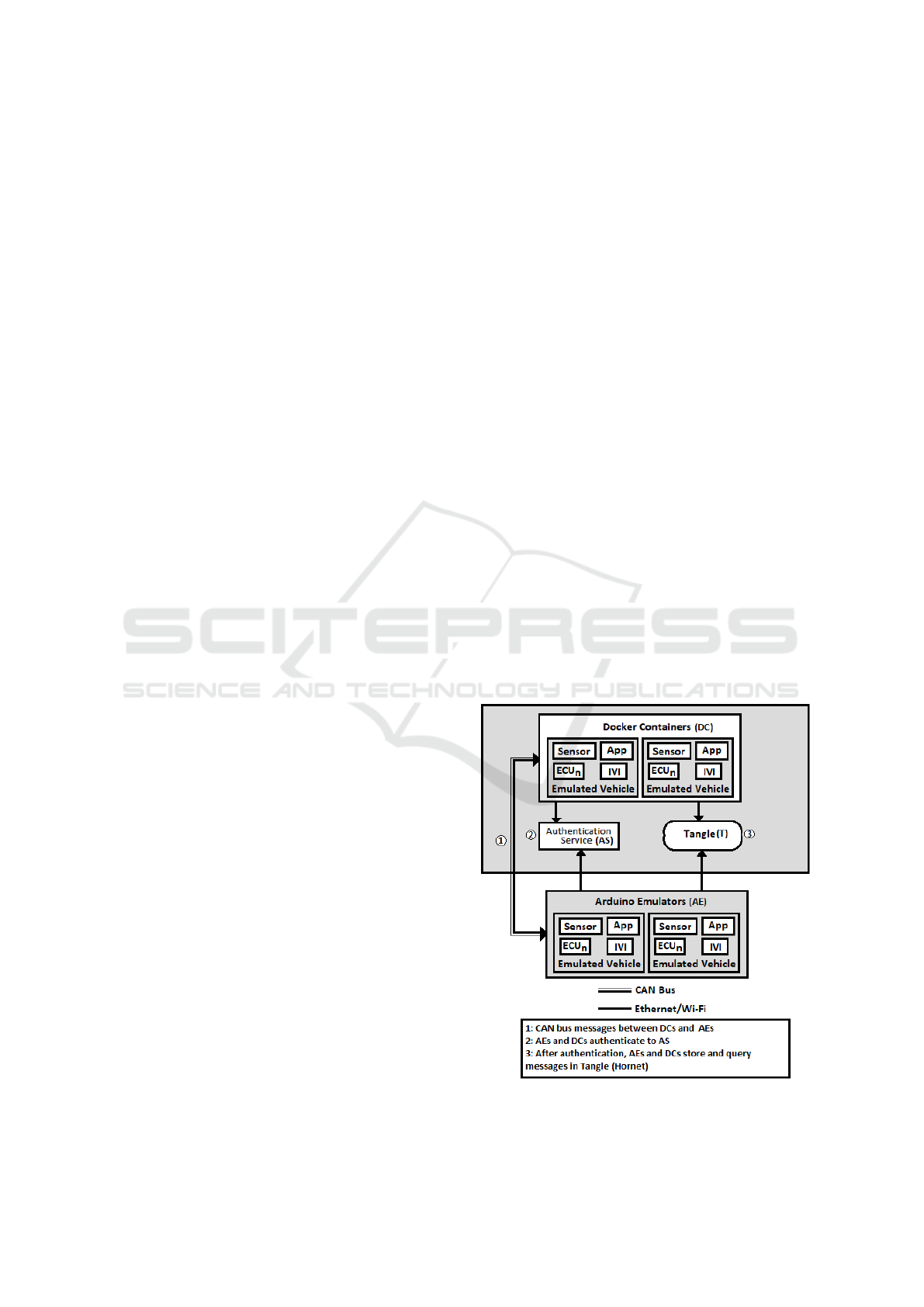
a high-level architecture perspective, using four pri-
mary components. These components are depicted in
Figure 1 and discussed below.
Figure 1: TEEm System Design Architecture.
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
232

4.1.1 Emulated Vehicles
TEEm’s emulated vehicles are identified in Figure 1
as the Docker Containers (DCs) and Arduino Emula-
tors (AEs). These emulators are configured with four
ECU Arbitration IDs (ArbIDs) each as well as other
functionality such as emulated battery state of charge
(SOC) data.
The DCs are executed from a Raspberry Pi 4B,
which also contains the Authentication Service (AS)
and the Tangle (T) instance (Hornet). Excluding pe-
ripherals and the USB2CAN converter, no modifica-
tions were made to the standard hardware configura-
tion. Using the DCs, it is trivial to introduce other
types of emulated data producers and consumers and
to test their interaction with the Hornet. One example
of this was the testing of sending battery SOC data to
the Hornet and querying that data.
The physical autonomous vehicle clients, the AEs,
are comprised of Arduinos and Arduino CAN shields.
The physical bus, external to the Tangle Server com-
ponent provides extensibility of the number of devices
on the CAN bus. By using low-cost hardware like Ar-
duinos, a range of vehicle sensor functions and data
can be more quickly and accurately emulated.
By using an unmodified Raspberry Pi 4B, we are
able to identify performance issues by examining the
performance metrics of the Tangle instance itself as it
runs within the same physical environment as the pri-
mary Operating System (Ubuntu 20.04) and the dif-
ferent TEEm-required networks.
4.1.2 Tangle
Different distributed storage technologies were exam-
ined while researching options for TEEm’s design.
Primarily examined were Blockchain instances, Dis-
tributed Hash Tables (DHTs), and the private Tangle
instance Hornet. Based upon ease of implementation
the decision was made to use Hornet.
4.1.3 CAN bus
The CAN bus section of TEEm is comprised of a sin-
gle physical and virtual CAN bus. The system com-
ponent that contains the Tangle instance makes use
of an internal Ethernet as well as an internal, virtual,
CAN bus. This virtual CAN bus is extended, via a
CAN to USB converter (USB2CAN) in order to in-
teract with the physical CAN bus portion of TEEm.
The networks used by TEEm, including the CAN
bus, are depicted and discussed in Figure 2 and dis-
cussed in Section 4.3.
4.1.4 Authentication Service
The Authentication Service (AS) of TEEm is envi-
sioned to be the manager of authentication an emu-
lated vehicle to the RSU. This service would provide
a newly authenticated vehicle with the required secu-
rity token and connection information to the Tangle
instance.
4.2 Environment Setup
This section presents a discussion of the hardware and
software that was used for each primary TEEm com-
ponent. We will first articulate the physical compo-
nents and then the software components.
4.2.1 Physical Components
In addition to hosting the Tangle instance, the Rasp-
berry Pi 4B (RPi4B) was chosen for usage because
it provides a programmable interface to interact with
the Arduino-based ECU Emulators, allows for captur-
ing of CAN bus and Ethernet traffic, and supports the
ability to generate metrics specific to both the CAN
bus and Hornet traffic.
As discussed above, TEEm makes use of Inno-
Maker’s USB2CAN (InnoMaker, 2021). This con-
verter is used to connect the physical CAN bus used
by the Arduino-based ECU emulators to the virtual
CAN bus of the RPi4B.
4.2.2 Software Components
Ubuntu 20.04 Server was chosen as the operating sys-
tem (OS) for the RPi4B. This choice was initially ar-
bitrary but proved to be fortuitous due to some of the
complexity of the Hornet setup as well as the mature
support for Docker and CAN bus within Ubuntu.
As previously mentioned, TEEm makes use of
Docker containers to emulate vehicles with ECUs. In
order to use Docker containers, both Docker Engine
and Docker Compose are required (Docker, 2021b).
The default can-utils package from the OS repos-
itory is used by TEEm for all CAN bus activities and
metrics within the OS. The can-utils package’s pri-
mary function within TEEm is to provide for and sup-
port the creation and configuration of the virtual CAN
bus on the RPi4B. The can-utils enables the use of the
USB2CAN adaptor for connecting the virtual CAN
bus on the RPi4B to the physical CAN bus that the
Arduino-based ECU Emulators are connected to, al-
lowing for all the Docker Container-based vehicles to
communicate with the Arduino-based ECUs.
The can-utils package also provides tools for gen-
erating (cangen), sniffing (cansniffer and candump),
TEEm: A Tangle-based Elastic Emulator for Storing Connected Vehicle Data in a Distributed Ledger Technology
233

and measuring CAN bus message traffic (canbus-
load). It should be noted that the txqueuelen param-
eter for the can interface must be set large enough to
handle the amount of traffic. For instance, if using
the default cangen setting of one message every 200
milliseconds, a txqueuelen of 1000 is sufficient for at
least 251 instances of cangen as well as the CAN bus
message traffic from the Arduino-based ECU emula-
tors. However, if cangen is configured to run with
a delay of 0 between generated messages, the TEEm
system as currently configured was not able to handle
more than 28 instances of the cangen process unless
the txqueuelen parameter is configured to be at least
10000.
The Tangle Web Interface, through five different
menu options, provides the mechanism for capturing
snapshot metrics as well as some searching capabili-
ties. These five menu options are:
• Dashboard: This tab allows for a quick view of:
how many neighbors are connected, if the Hornet
is synced, Milestone snapshots, Transactions Per
Second (TPS), and server memory cache usage.
• Neighbors: This tab shows each neighbor, if that
neighbor is connected, and general network met-
rics per connected neighbor.
• Tangle Explorer: The Tangle Explorer tab allows
a user to search Bundle, Transaction, or Address
Hash, as well as Milestone Index.
• Visualizer: The visualizer tab will create and dis-
play a visual depiction of the Hornet. Hornet
databases are Directed Acyclical Graphs (DAGs)
and this visualization is constantly changing to re-
flect the confirmed milestones, solid and unsolid
transactions, and tips.
• Misc: This tab provides visual metrics for: Tip-
Selection Performance, Request Queue, Server
Metrics, Cache Size, Requests, and Database.
4.3 Lab Networks
The TEEm lab setup described in this paper and
shown in Figure 2 makes use of two primary network
configurations: the private-tangle Docker Bridge net-
work and the virtual CAN bus network (configured as
can0). External Ethernet access is used only for main-
tenance of the other devices.
As Figure 2 depicts, the virtual and physical Ve-
hicle emulators are connected to the same CAN bus.
As described in Section 4.1, this CAN bus consists
of both physical and virtual segments. Terminating
resisters are provided by the Arduinos. The Docker
based vehicle emulators are additionally part of a pri-
vate (RFC1918-based) network. This private network
Figure 2: TEEm Network Setup.
is inherent to Docker and allows for the individual
Docker Containers (individual virtual vehicle emula-
tors) to communicate via Ethernet with the Tangle in-
stance.
4.4 Setting up the IOTA Private Tangle
There are different ways in which an IOTA (IOTA,
2021b) Hornet network can be established. For
the purposes of creating TEEm, we chose to utilize
the private-tangle bridge created by IOTA’s one-click
setup script found at (iotaledger, 2021).
The private-tangle bridge is created by the one-
click private-tangle script. This network will gen-
erally be a Class C network within the 172.0.0.0/16
block. The default private-tangle setup files have been
modified to restrict the private-tangle bridge to net-
working only within the 172.20.0.0/24 subnet. When-
ever a new instance of the Hornet network is started,
specific IP Addresses (IPAs) for each container can
change; typically, once an address has been assigned
to a Docker Container, that container will have the
same IPAs every time the Container is started.
The script creates a local Hornet network with a
minimal number of components as Docker containers.
These components are: a Coordinator, a Spammer,
a NGINX, and a Node. For purposes of the TEEm
setup, the Spammer and NGINX containers can be
stopped and removed but the choice was made to not
modify either of these. The primary changes made to
the Hornet network from the script was the addition
of more Nodes.
4.5 CAN bus Functionality on
Raspberry Pi 4B
Configuring the CAN bus functionality on the Rasp-
berry Pi 4B requires two steps: 1) ensuring that
the standard Linux can-utils package is installed and
functional and, 2) the installation and configuration of
the USB2CAN hardware interface.
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
234

The can-utils package from the default Ubuntu
repository was installed and then tested by establish-
ing a CAN bus network interface and then generating
and sniffing arbitrary CAN traffic. In addition to the
can-utils package, some Kernel Modules are needed
for the USB2CAN device to run properly. These Ker-
nel Modules can be loaded by using the modprobe
command with the can, can-raw, can-dev, can-bcm,
and slcan modules.
Once the proper Kernel Modules are loaded, the
chosen USB2CAN hardware interface (InnoMaker,
2021) used for the TEEm is supported by the can-
utils package and was easily configured following
the vendor instructions, using both the slcand and
ifconfig commands. The slcand command will assign
the USB device to a CAN interface and the ifconfig
command is used to bring up the CAN interface and
to set an appropriate txqueuelen value (we chose a
large value of 50000). This device can be configured
as the can0 interface on the OS and allows for the
CAN bus traffic to be consumed by both the virtual
ECUs and the Arduino-based ECU emulators.
4.6 ECU Docker Container Image
TEEm was originally based entirely within a single
virtual machine (VM) and did not interface with any
other physical components. In order to test func-
tionality of the TEEm system using CAN bus traffic,
virtual ECUs were created using Docker containers
based upon the default Alpine (iotaledger, 2021) im-
age from the Docker container repository. (Docker,
2021b)
The Alpine image is a minimally-sized Linux dis-
tribution. However, after the required software was
installed for CAN bus network support as well as in-
teraction with the Hornet network, the total image size
was 878MB. As twelve virtual ECUs were to be cre-
ated and used, the image was further customized to
remove all unnecessary packages. This further cus-
tomization resulted in a total size-on-disk of the im-
age being approximately 146MB.
4.7 Run ECU Containers
Once the Docker Image has been created, there are
two primary methods of running one or more ECU
Containers based on this newly created image. The
first method is to run an instance of an image.
The other method is to create and use a docker-
compose.yml file with the Docker Compose Engine.
When using this method, the specific Docker Con-
tainer instance must exist by name within the docker-
compose.yml file.
4.8 Arduino-based ECU Emulators
The AEs can be created using any Arduino that sup-
ports a CAN bus Shield and from any version of the
Arduino IDE as well and a working CAN bus library.
In general terms, each AE emulator is configured to:
• Run a continuous loop checking for any received
CAN messages
• Respond to CAN messages with specific Arbitra-
tion IDs (ArbIDs) by sending a CAN message to
a different ArbID
Thus, it is the preference of the software author as
to which libraries and/or packages are used to cre-
ate these emulators. The current configuration has
the Arduino-based ECU emulators in a listening loop-
back until packets matching one of a specifically de-
fined group of ArbIDs is received. Once any of the
Arduino-based ECU emulators receives a specific Ar-
bID, this will trigger the sending of a CAN bus mes-
sage to another Arduino-based ECU emulator, which
will then trigger the second Arduino-based ECU emu-
lator to send to the third and, eventually, all five phys-
ical ECU emulators are sending and receiving to each
other uninterrupted.
4.9 CAN bus Message Data in Hornet
The Hornet network can be interacted with through
five (5) different programming languages. Python
was chosen for its ease of use.
The PYOTA API library from (IOTA-Community,
2021) provides methods for querying the Hornet net-
work by Address or Tag as well as getting Node
API information, Neighbor information, and retriev-
ing and decoding Tryte information.
The python code used to access a Hornet node’s
API interface and send a CAN bus message to the
Hornet can be written in 20 lines of code, or fewer.
TEEm uses a block of this python code that is ex-
ecuted within a while loop. This loop is sniffing the
CAN bus and testing each message’s Arb ID. If a mes-
sage’s Arb ID matches the ones assigned to the given
vehicle, the CAN bus message string, to include the
timestamp, is sent to the Hornet. This process is visu-
alized in Algorithm 1.
The message string does require modification
which involves appending the CAN bus message with
”From Car” and the assigned vehicle number. Be-
cause a custom address and tag value is used per ve-
hicle, both of these variables can be used to search the
Hornet.
TEEm: A Tangle-based Elastic Emulator for Storing Connected Vehicle Data in a Distributed Ledger Technology
235
Algorithm 1: CAN message processing.
1: arbids =Assigned ArbIDs
2: while CAN message exists do
3: if arbid is in arbids then
4: CAN message sent to Hornet
5: else
6: CAN message is discarded
7: end if
8: end while
As currently configured, when the TEEm startup
script is executed, each of the twelve (12) Docker
Container-based Vehicles is assigned a specific Hor-
net Node for executing Hornet API calls. Addition-
ally, at TEEm startup, each Docker Container-based
Car is randomly assigned four ArbIDs to represent
a vehicle with four unique ECUs. When a Docker
Container-based Vehicle receives a CAN bus message
meant for one of its assigned ECU ArbIDs, the full
message is sent to the Hornet instance, making use of
the API access on a previously chosen Hornet Node.
In addition to the actual CAN bus message, the stored
string will also contain the ArbID that actually re-
ceived the message along with the current number of
messages that the ArbID has received since the start-
ing of the TEEm iteration.
5 CYBERSECURITY AND
PRIVACY APPLICATIONS
This section provides discussion on how the real-
world use of a Tangle, or other Distributed Ledger
Technology (DLT) can be used within connected ve-
hicle environments to provide for cybersecurity and
privacy protection applications.
As discussed in Section 2.1, the private Tangle
instance, Hornet, provides key features that facili-
tate the cybersecurity and privacy goals: distributed
copies of the database, individual transaction hashes,
and the availability to query data from the Hornet
database.
The distribution feature, in conjunction with the
transaction hashing feature provides for protection
against privacy and potential theft. If an adversary
attempted to modify a transaction that has already oc-
curred, the modified transaction will not be accepted
as its hash already exists in the other database copies.
The transaction hashing feature provides for both
immutability of stored data as well as a chaining
of transactions that support forensic analysis. This
type of analysis supports current research (Florea and
Taralunga, 2020) for the detection of battery tamper-
ing. If an Electronic Vehicle (EV) is reporting health
statistics to the Hornet, this data can be used in a few
different types of applications:
• Trending of battery performance data
• Clustering algorithm support real time detection
of battery data tampering or attacks on the battery
directly
6 EVALUATION
6.1 CAN bus Traffic Creation and
Evaluation
Every effort was made to design and configure TEEm
to be as realistic as possible while attempting to es-
tablish upper bounds on storing messages in the Hor-
net instance. To accomplish this, each emulated ECU
(Docker Container-based and Arduino-based) has a
minimal delay of 100 milliseconds built-in via the
processing loop code. This value was arbitrarily cho-
sen as the starting point to represent message tim-
ing and queuing constraints injected by actions such
as processor scheduling, dropped frames, and actual
ECU processing time. This delay allows for ad-
ditional future efforts focused on timing, blocking,
queuing, and dropped metrics of CAN bus messages
on the bus as well as the process of storing CAN bus
messages in the Hornet.
There is no standard, fixed target regarding CAN
bus loads. A given vehicle, on average, will have a
CAN bus load between 40-60%. Errors, normally
dropped frames, start to occur in CAN bus loads
around 20%. Thus, it was decided that the maximum
possible load should be applied to the TEEm CAN
bus. The highest load percentage achieved, and used
for all TEEm testing, is 96%. This was achieved by
the CAN bus messaging produced by the Arduino-
based ECU emulators as well as 228 instances of the
cangen process. In order to achieve max load, and
thus max errors and queue usage, the cangen process
was executed using a delay of 0 seconds between mes-
sages. The actual data sent with each cangen message
is of arbitrary value and length.
6.2 CAN bus Message Storage Process
Evaluation
Because each ECU maintains a running count of the
number of CAN bus messages that a given ArbID has
received, and that count is stored along with its re-
spective CAN bus message in the Hornet, it is trivial
to determine if every message sent on the bus has been
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
236
both received and processed by its assigned ECU/ve-
hicle.
6.3 Hornet Performance Evaluation
The one-click private-tangle setup script for Hornet
includes a web interface. This interface has five sep-
arate menu areas that are described in Section 4.A.2.
Through these different options, the TEEm user can
identify networking, cache, and database actions. The
Hornet database is configured to auto-prune in order
to keep the database to a minimal size. This auto-
pruning also fully supports future planned efforts to
emulate a vehicle entering and leaving a given Hor-
net ”zone” when that vehicle acts as a member node
of the Hornet. Through the Misc tab, we can see that
the Hornet database grows within the TEEm instance
at an approximately constant rate of 32 MB/h until
the maximum size is reached. It should be noted that
the auto-pruning functionality is defined per Hornet
Node and the database metrics found in the web in-
terface are specific to the Node connected to by the
web browser.
In addition to the database size metric, the web
interface also allowed for our determination that the
largest number of transactions processed by the con-
nected Hornet Node in one second was 74 (52 In-
coming and 22 Outgoing) and that this used approxi-
mately 43.1 MB of Heap memory with an additional
2 MB allocated on the Stack. The average amount of
Heap memory used over a six (6) day iteration was
53.7 MB but this value will vary from machine to ma-
chine based upon resource availability and allocation.
6.4 Hornet Data Access Evaluation
Access to the Hornet system in TEEm is done through
the PYOTA python library or through the linux built-
in command curl. The PYOTA library allows for
both a core and extended set of API calls. These
API calls and their responses are JSON formatted
and thus easily digested by common tools. How-
ever, the current TEEm configuration makes use of
python scripts specifically created for TEEm. Most
Hornet API calls through the PYOTA library will re-
turn a duration value in addition to the requested data.
Throughout all TEEm experiments, the largest dura-
tion value seen was 2.3 seconds. This 2.3 seconds
was atypical and was the result of a purposely crafted
query that was intended to test the API call and does
not have any real-world application. Standard queries
using transaction ”tags” and the PYOTA library are
shown in Table 1 and queries for transaction ”ad-
dresses” were performed using curl and are shown
in Table 2. Ten different transaction ”tags” and ”ad-
dresses” were queried and for each queried tag and
address, the number of returned records are shown in
the ”Records” column. These queries were executed
with the linux time command. The output of the time
command is shown in the ”Real”, ”User”, and ”Sys”
columns.
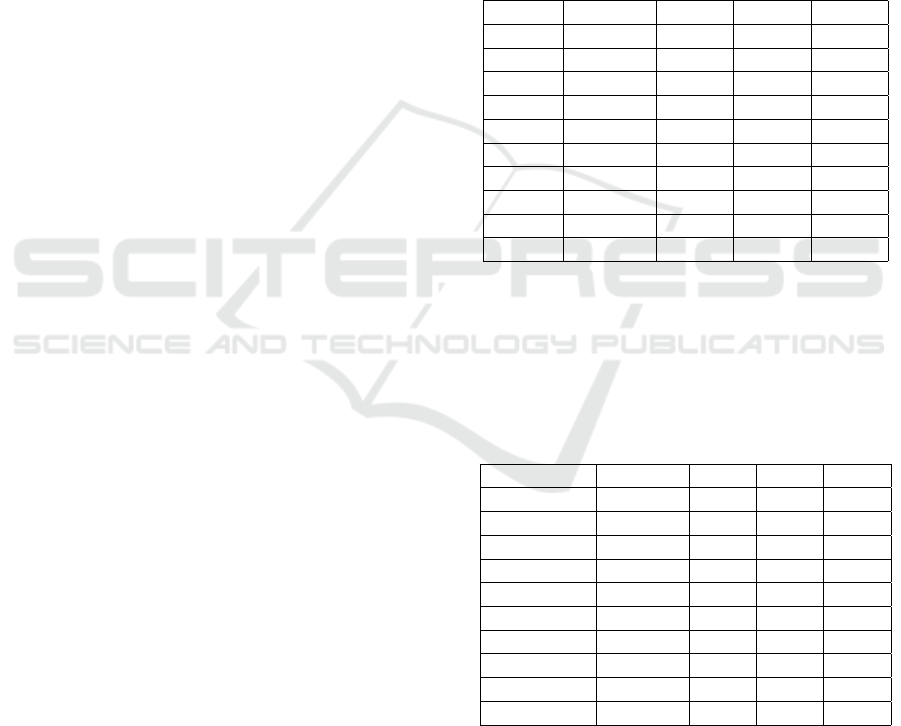
The results of the PYOTA based queries, summa-
rized in Table 1, show that between 984 - 999 records
were returned in times ranging between 472ms -
508ms. While these execution times are relatively
short, we show that the queries executed via the curl
command are significantly faster.
Table 1: Hornet Data Query Using Python.
Query Records Real User Sys
Tag-1 985 486ms 374ms 90ms
Tag-2 999 478ms 394ms 65ms
Tag-3 999 485ms 398ms 68ms
Tag-4 999 481ms 365ms 97ms
Tag-5 999 480ms 347ms 108ms
Tag-6 999 473ms 374ms 81ms
Tag-7 999 472ms 380ms 73ms
Tag-8 984 477ms 371ms 88ms
Tag-9 999 475ms 383ms 73ms
Tag-10 999 508ms 398ms 90ms
As previously mentioned, the queries of transac-
tion ”addresses” using the curl command are below.
The number of records returned range between 991
and 1001. The execution times are, as mentioned
above, significantly smaller, ranging between 3 ms -
39 ms
Table 2: Hornet Data Query Using Curl.
Query Records Real User Sys
Address-1 1001 35ms 17ms 14ms
Address-2 1001 34ms 16ms 12ms
Address-3 1001 34ms 12ms 16ms
Address-4 1001 33ms 8ms 21ms
Address-5 1001 34ms 12ms 17ms
Address-6 1001 35ms 17ms 13ms
Address-7 1001 34ms 13ms 17ms
Address-8 993 39ms 5ms 26ms
Address-9 1001 35ms 24ms 5ms
Address-10 991 34ms 14ms 15ms
Shown in Table 3 below is the change in system
memory usage over a given period. In this case, we
measured memory usage at TEEm initialization and
24 hours later. These measurements were obtained
using the linux top command. The system has 7113.3
Mb of RAM and as shown here, TEEm can become
memory intensive. During this 24-hour period, the
TEEm: A Tangle-based Elastic Emulator for Storing Connected Vehicle Data in a Distributed Ledger Technology
237

Hornet database averaged in size of 142.0 Mb and the
virtual CAN bus was running at an average load of
25% with 50 virtual docker vehicles having four as-
signed Arbitration IDs each.
Table 3: Hornet Memory Usage.
Measure Free Used Buff
Mem at Start (MBs) 6170.9 732.1 908.3
Mem at Start+24hrs 98.2 3473.5 4239.6
Change -6072.7 2741.4 3331.3
7 RELATED WORK
7.1 In-/Inter-Vehicle Attack Vectors and
Countermeasures
As vehicles have become more connected and make
use of multiple technologies, the number of attack
vectors and the size of the attack surface has in-
creased. Additionally, this attack surface consists
of both In-Vehicle and Inter-Vehicle networks. Re-
cent research has made efforts to categorize the types
of attacks, the types of attackers, and potential de-
tection and mitigation techniques. The authors of
(Aliwa et al., 2021) present four general categories
of attacks, with possible countermeasures, against
in-vehicle vectors: direct interface-initiated attacks,
infotainment-initiated attacks, telematics-initiated at-
tacks, and sensor-initiated attacks.
7.2 Current Advancement Areas -
In-Vehicle Security
Some of the recent In-Vehicle Cybersecurity areas of
advancement include Message and ECU Authentica-
tion (ByteParadigm, 2021), Data Encryption, Intru-
sion Detection Systems and Gateways/Firewalls, and
Cloud storage of encrypted data. These areas con-
tinue to be primary focal points of commercial and
academic research. Advancements in Artificial Intel-
ligence/Machine Learning have been investigated for
IDS applications. Further areas of current advance-
ment are those of encryption and hashing algorithms.
7.3 Current Advancement Areas -
Inter-Vehicle Security
Current Inter-Vehicle cybersecurity research areas for
advancement predominantly focus on vehicle local-
ization and secure communications. Researchers in
(Du et al., 2019) show a schema for using both Ded-
icated Short-range Communication (DSRC) and Ex-
tended Kalman Filtering for cooperative localization.
Maintaining vehicle spacing using Adaptive Cruise
Control (ACC), road grade, and motion preview from
the lead vehicle is presented by researchers in (Firoozi
et al., 2019). Researchers in (Alipour-Fanid et al.,
2020) investigate the effects of jamming attacks on
ACC. Both localization and distancing efforts are key
components in efforts to detect Sybil attacks. Using
a shared key for protecting intra-convoy communica-
tions is the focus of (Al-Shareeda, 2019).
7.4 New Challenges
Networking advancements, especially in the Cellular-
Vehicle to Everything (C-V2X) domain, presents new
challenges in protecting the communications that use
these new advancements. The security of LTE-V2X
is examined by researchers in (Zhu and Zhang, 2020).
Connectionless communications using Bluetooth 5.0
technologies are examined in (Garc
´
ıa Ortiz et al.,
2020). One of the problems of RF communications
is that they do not always provide reliable and stable
links and the authors of (Wang et al., ) show how unre-
liable links can still be used in vehicle platooning con-
trol. Recently, research into 6G technologies and im-
plementations presents another area of focus regard-
ing vehicle cybersecurity. Researchers in (Chen et al.,
2020) examine the use of deep learning with 6G tech-
nologies as a means to provide safe distancing with
autonomous vehicles. The challenges and research ar-
eas mentioned in this section are only a tiny fraction
of the issues currently facing vehicle cybersecurity ef-
forts.
7.5 DLT Technologies and Current
Vehicle Data
The popularity of DLT technologies in recent years,
especially Blockchain, has led to novel research ef-
forts in the domain of using DLT technologies to store
and/or process vehicle data. Researchers in (Dorri
et al., 2017) focus directly on the use of Blockchain
with Connected Smart Vehicles (CSV) to store and
protect data related to security and privacy. The au-
thors of (Falco and Siegel, 2020) present a frame-
work that uses vehicle-based DHT Nodes combined
with an external Blockchain storage structure. The
primary focus of this work is the secure updating of
vehicle/ECU software. The survey found in (Rahtore
et al., 2020) discusses the use of Blockchain within
Cyber-Physical Systems (CPS) to include different
vehicle and transportation systems as well as Smart
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
238

Cities. Another study of Blockchain used as a data
storage mechanism for vehicles and Smart Cities is
presented in (Javed et al., 2020).
There has been some research into the usage of
DLT and Blockchain with regard to vehicle cyber-
security. The authors of (Dorri et al., 2017) present
a potential solution for using Blockchain to store
both automotive security and user privacy data. Fo-
cused on a Smart Public Safety system, the authors
of (Xu et al., 2019) present BlendMAS, a Blockchain
architecture based on Service Oriented Architecture
(SOA) and Internet of Things communications using
the HTTP protocol. Integrating a DHT with a Peer
to Peer (P2P) architecture for the purposes of stor-
ing IoT data is presented in (Tracey and Sreenan,
2019). Smart Contracts, a form of Blockchain, and
their usage within Smart Cities is discussed in (Lind-
say, 2018) and (Montes et al., 2019).
8 HORNET USE-CASE
In this section we present a real-life, high-level use-
case for storing and using CAN bus message data in a
Hornet instance. The use-case presented here is based
upon the following assumptions:
Assumption 1: Each Roadside Unit (RSU) has a
service range based upon the signal strength measured
from each vehicle. Determining the effective range is
out of scope for this effort.
Assumption 2: Each RSU implements an authen-
tication system when a vehicle enters or leaves the
RSU’s service range. The ability of RSUs to im-
plement authentication and message signing can be
found in (Ashritha and Sridhar, 2015), (Hsin-Te et al.,
2010), (Aman et al., 2021), and (Bendouma and Bens-
aber, 2017).
Assumption 3: The RSU has an active Hornet
Node at all times and will use its own Hornet Nodes’
API for performing Hornet functions.
Assumption 4: The RSU will prune from the Hor-
net the data belonging to a vehicle’s VIN when said
vehicle is deauthenticated from that RSU.
Assumption 5: The RSU makes use of a dynam-
ically configurable firewall in order to control access
to the Hornet from authenticated vehicles.
Assumption 6: A vehicle that has been inactive
for a set period (we arbitrarily chose five minutes),
with regards to Hornet operations, will be deauthen-
ticated from the RSU and will, at first available in-
stance, remove all data previously retrieved from the
RSU’s Hornet. If a vehicle is still within the RSU’s
service range, the authentication to the RSU will be
preformed again. This accounts for use cases of:
• Vehicles that may have been parked and shutdown
for a length of time
• Failures or obstacles to line-of-sight (LOS) com-
munication links
• Vehicle is unable to make of LOS links and is not
capable of establishing non-line-of-site (NLOS)
communication lengths.
This inactivity period also removes the dependency
on the vehicle to notify the RSU that the vehicle is
stopping or ending a route. After deauthentication,
the actions performed during the ”Leaving the RSU
Area” phase are performed.
Assumption 7: Data in the Hornet has two lev-
els of access: 1) publicly available data that all RSU-
authorized vehicles, as well as all Hornet nodes, can
query, and 2) encrypted data that access is denied to
all vehicles and Hornet nodes unless specially permit-
ted.
8.1 Entering RSU Area
Entering the RSU area involves the following steps:
1) RSU-controlled authentication of vehicle
2) RSU dynamically adjusts its firewall rules
3) RSU submits vehicle VIN to Hornet
4) Vehicle queries Hornet
5) Vehicle is able to fully interact with Hornet
We start by assuming that a vehicle will be sub-
jected to an (1) RSU-controlled authentication pro-
cess when it is within an effective range of communi-
cations with an RSU. As part of the the authentication
processes, when the RSU is satisfied that the vehicle
is who it claims to be, (2) the RSU will dynamically
adjust its firewall rules to allow the vehicle’s IPAs to
connect to, and interface with, the API from any of
the RSU’s Tangle Nodes. Once the RSU has allowed
a vehicle to connect to the Hornet, (3) the RSU will
create and submit a Hornet transaction that contains
the VIN of the just-authorized vehicle. (4) The vehi-
cle will query the Hornet for its own VIN and, upon
a (5) successful query execution, will be able to com-
municate with the Hornet and will be able to actively
query all publicly available data within the Hornet.
8.2 Storing CAN bus Message Data in
Hornet
Once the vehicle is authenticated and is a node in the
RSU’s Tangle, the vehicle is able to store data in the
Hornet, in the form of a null-value transaction. Us-
ing its Vehicle Identification Number (VIN) as the ad-
dress for all of its transactions, the vehicle is able to
TEEm: A Tangle-based Elastic Emulator for Storing Connected Vehicle Data in a Distributed Ledger Technology
239

send data-agnostic transactions to the Hornet. For our
purposes here, the vehicle will submit a new transac-
tion at 500 millisecond intervals to the Hornet. These
transactions will contain the vehicle’s VIN and veloc-
ity. Thus, the Hornet will have accurate an accurate
location of the vehicle that is no older than 500ms.
8.3 Using CAN bus Message Data from
Hornet
RSU-authenticated vehicles are able to query all pub-
licly available data that is stored in the Hornet net-
work. As such, the data stored by each vehicle is
potentially usable by every other vehicle node in the
Hornet network. This availability of data, along with
the ability for each vehicle node to query Hornet pro-
vides a mechanism to support safety, privacy, and cy-
bersecurity concerns.
Because the RSU stores all currently authenticated
VINs within the Hornet, using the RSUs Hornet ad-
dress and a transaction tag of ”VINs,” all vehicles
joined to the Hornet are able to query by address
and tag to identify all of the vehicles currently within
range of the RSU. Once a vehicle has a list of the other
connected VINs, a query of the Hornet, using a spe-
cific VIN, is executed to obtain all globally available
information that the target VIN has stored in the Hor-
net. This function can be executed by the vehicle as
a batch job and, obtaining location and velocity data
of every RSU/Hornet connected VIN, the vehicle is
able to determine if there are any imminent threats of
collision with other vehicles.
8.4 Leaving RSU Area
When a vehicle leaves a specific RSU’s area, the RSU
will deauthenticate the vehicle from both its Hornet as
well as itself. The vehicle, after no longer having au-
thenticated communications with the Hornet and RSU
will purge all Hornet data that the vehicle was storing
and using.
When the RSU deauthenticates the vehicle, it will
first dynamically reconfigure its firewall to block all
non-authentication based traffic between the Hornet
nodes and the vehicle. The RSU will then purge the
Hornet database of the vehicle’s data.
9 CONCLUSION
This paper presented the creation of TEEm, a hybrid
virtual and physical environment, that is used for the
testing of storing CAN bus message data in a DLT
(i.e. Hornet). It presented details of the technologies
used, described the design and setup, and presented
the evaluation of TEEm. In addition, other works re-
lated to this effort were discussed, and a basic use-
case for autonomous vehicles storing and accessing
data from the Tangle network was presented. The ver-
satile nature of TEEm allows for quick configuration
of virtual vehicles and realistic injection of latency
and noise in physical connections. In future work,
TEEm should contribute to ECU behavior modeling,
prototyping of CAN bus firewall rules, and prototyp-
ing of CAN bus IDS technology.
REFERENCES
Al-Shareeda, S. (2019). Veiled shared key generation
for intra-convoy secret communication sessions. In
2019 International Symposium on Networks, Comput-
ers and Communications (ISNCC), pages 1–7.
Alipour-Fanid, A., Dabaghchian, M., and Zeng, K. (2020).
Impact of jamming attacks on vehicular cooperative
adaptive cruise control systems. volume 69, pages
12679–12693.
Aliwa, E., Rana, O., Perera, C., and Burnap, P. (2021).
Cyberattacks and countermeasures for in-vehicle net-
works. 51(1):1–37.
Aman, M. N., Javaid, U., and Sikdar, B. (2021). A privacy-
preserving and scalable authentication protocol for the
internet of vehicles. IEEE Internet of Things Journal,
8(2):1123–1139.
Ashritha, M. and Sridhar, C. S. (2015). Rsu based efficient
vehicle authentication mechanism for vanets. In 2015
IEEE 9th International Conference on Intelligent Sys-
tems and Control (ISCO), pages 1–5.
Banihani, A., Alzahrani, A., Alharthi, R., H., F., and Corser,
G. P. (2018). T-paad: Trajectory privacy attack on au-
tonomous driving. In 2018 IEEE Conference on Com-
munications and Network Security (CNS), pages 1–2.
Bendouma, A. and Bensaber, B. A. (2017). Rsu authentica-
tion by aggregation in vanet using an interaction zone.
In 2017 IEEE International Conference on Communi-
cations (ICC), pages 1–6.
Bozdal, M., Samie, M., and Jennions, I. (2018). A survey on
can bus protocol: Attacks, challenges, and potential
solutions. In 2018 International Conference on Com-
puting, Electronics Communications Engineering (iC-
CECE), pages 201–205.
ByteParadigm (2021). Introduction to i2c and spi protocols.
Chen, X., Leng, S., He, J., and Zhou, L. (2020). Deep learn-
ing based intelligent inter-vehicle distance control for
6g-enabled cooperative autonomous driving.
Chua, H. N., Teh, J. S., and Herbland, A. (2021). Identi-
fying the effect of data breach publicity on informa-
tion security awareness using hierarchical regression.
IEEE Access, 9:121759–121770.
Docker (2021a). Docker: Docker.
Docker (2021b). Docker repository.
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
240

Dorri, A., Steger, M., Kanhere, S., and Jurdak, R. (2017).
Blockchain: A distributed solution to automotive se-
curity and privacy. volume 55, pages 119–125.
Du, L., Chen, L., Hou, X., and Chen, Y. (2019). Coop-
erative vehicle localization base on extended kalman
filter in intelligent transportation system. In 2019
28th Wireless and Optical Communications Confer-
ence (WOCC), pages 1–5.
Falco, G. and Siegel, J. E. (2020). Assuring automotive
data and software integrity employing distributed hash
tables and blockchain.
Firoozi, R., Nazari, S., Guanetti, J., O’Gorman, R., and
Borrelli, F. (2019). Safe adaptive cruise control with
road grade preview and V2V communication. In 2019
American Control Conference (ACC), pages 4448–
4453.
Florea, B. C. and Taralunga, D. D. (2020). Blockchain
iot for smart electric vehicles battery management.
12(10):3984.
Garc
´
ıa Ortiz, J. C., Silvestre-Blanes, J., Sempere-Paya, V.,
and Tortajada, R. P. (2020). Feasability of bluetooth
5.0 connectionless communications for i2v applica-
tions. In 2020 25th IEEE International Conference
on Emerging Technologies and Factory Automation
(ETFA), pages 1119–1122.
Hsin-Te, W., Li, W.-S., Tung-Shih, S., and Hsiehz, W.-S.
(2010). A novel rsu-based message authentication
scheme for vanet. In 2010 Fifth International Con-
ference on Systems and Networks Communications,
pages 111–116.
Hubaux, J. P., Capkun, S., and Luo, J. (2004). The security
and privacy of smart vehicles. volume 2, pages 49–55.
Huybrechts, T., Vanommeslaeghe, Y., Blontrock, D., Barel,
G. V., and Hellinckx, P. (2017). Automatic reverse
engineering of CAN bus data using machine learn-
ing techniques. pages 751–761. Springer International
Publishing.
InnoMaker (2021). Usb2can.
IOTA (2021a). Hornet: Hornet.
IOTA (2021b). Iota homepage.
IOTA-Community (2021). Python iota workshop.
iotaledger (2021). One-click tangle.
Javed, M. U., Rehman, M., Javaid, N., Aldegheishem, A.,
Alrajeh, N., and Tahir, M. (2020). Blockchain-based
secure data storage for distributed vehicular networks.
10(6):2011.
Lindsay, J. (2018). Smart contracts for incentivizing sensor
based mobile smart city applications. In 2018 IEEE
International Smart Cities Conference (ISC2), pages
1–4.
M., C. and Lee, J. (2011). Ppas: A privacy preservation au-
thentication scheme for vehicle-to-infrastructure com-
munication networks. In 2011 International Confer-
ence on Consumer Electronics, Communications and
Networks (CECNet), pages 1509–1512.
Mazloom, S., Rezaeirad, M., Hunter, A., and McCoy, D.
(2016). A security analysis of an in-vehicle infotain-
ment and app platform. In 10th USENIX Workshop on
Offensive Technologies (WOOT 16).
Mekliche, K. and Moussaoui, S. (2013). Location-based
privacy-preserving detection of sybil attacks. In 2013
11th International Symposium on Programming and
Systems (ISPS), pages 187–192.
Miller, C. and Valasek, C. (2013). Adventures in automotive
networks and control units. 21(260-264):15–31.
Miller, C. and Valasek, C. (2014). A survey of remote auto-
motive attack surfaces. 2014:94.
MIller, C. and Valasek, C. (2015). Remote exploitation of
an unaltered passenger vehicle.
Montes, J. M., Ramirez, C. E., Gutierrez, M. C., and Larios,
V. M. (2019). Smart contracts for supply chain appli-
cable to smart cities daily operations. In 2019 IEEE
International Smart Cities Conference (ISC2), pages
565–570.
Rahtore, H., Mohamed, A., and Guizani, M. (2020). A
survery of blockchain enabled cyber-physical sys-
tems. volume 20.
Security, U. (2020). Upstream security’s 2020 global auto-
motive cybersecurity report.
T. W. Chim, S. M. Yiu, L. C. K. H. and Li, V. O. K. (2009).
Security and privacy issues for inter-vehicle commu-
nications in vanets. In 2009 6th IEEE Annual Com-
munications Society Conference on Sensor, Mesh and
Ad Hoc Communications and Networks Workshops,
pages 1–3.
Tracey, D. and Sreenan, C. (2019). Using a dht in a peer to
peer architecture for the internet of things. In 2019
IEEE 5th World Forum on Internet of Things (WF-
IoT), pages 560–565.
Tyagi, A. K. and Sreenath, N. (2015). Location privacy
preserving techniques for location based services over
road networks. In 2015 International Conference
on Communications and Signal Processing (ICCSP),
pages 1319–1326.
Wang, J., Ma, F., Yang, Y., Nie, J., ksun Guvenc, B., and
Guvenc, L. Adaptive event-triggered platoon control
under unreliable communication links.
Wen, Q., Chen, A., and Lin, Z. (2020). Plug-n-pwnded:
Comprehensive vulnerability analysis of obd-ii don-
gles as a new over-the-air attack surface in automotive
iot. In 29th USENIX Security Symposium (USENIX
Security 20), pages 949–965.
Xu, R., Nikouei, S. Y., Chen, Y., Blasch, E., and Aved,
A. (2019). Blendmas: A blockchain-enabled decen-
tralized microservices architecture for smart public
safety. In 2019 IEEE International Conference on
Blockchain (Blockchain), pages 564–571.
Zhu, K. and Zhang, L. (2020). Security analysis of LTE-
V2X and a platooning case study. In IEEE INFOCOM
2020 - IEEE Conference on Computer Communica-
tions Workshops (INFOCOM WKSHPS), pages 532–
537.
TEEm: A Tangle-based Elastic Emulator for Storing Connected Vehicle Data in a Distributed Ledger Technology
241
