
Snakes in Trees: An Explainable Artificial Intelligence Approach for
Automatic Object Detection and Recognition
Joanna Isabelle Olszewska
School of Computing and Engineering, University of the West of Scotland, U.K.
Keywords:
Explainable Artificial Intelligence, Explainable by Design, Computer Vision, Machine Vision, Smart Cities,
Industry 4.0, Intelligent Systems, Decision Tree, Snake, Active Contours, Recursive Algorithm, Unsupervised
Labeling, Semantic Tag, Automatic Image Annotation.
Abstract:
Nowadays, the development of smart cities boosts the development of innovative IT technologies based on
Artificial Intelligence (AI), such as intelligent agents (IA), which themselves use new algorithms, complex
software, and advanced systems. However, due to their expanding number and range of applications as well
as their growing autonomy, there is an increased expectation for these intelligent technologies to involve
explainable algorithms, dependable software, trustworthy systems, transparent agents, etc. Hence, in this
paper, we present a new explainable algorithm which uses snakes within trees to automatically detect and
recognize objects. The proposed method involves the recursive computation of snakes (aka parametric active
contours), leading to multi-layered snakes where the first layer corresponds to the main object of interest, while
the next-layer snakes delineate the different sub-parts of this foreground. Visual features are extracted from the
regions segmented by these snakes and are mapped into semantic concepts. Based on these attributes, decision
trees are induced, resulting in effective semantic labeling of the objects and the automatic annotation of the
scene. Our computer-vision approach shows excellent computational performance on real-world standard
database, in context of smart cities.
1 INTRODUCTION
According to the United Nations (UN), more than half
of the World population currently lives in urban ar-
eas, and this trend is only rising (Bhattacharya et al.,
2020). Therefore, there is a need to rethink cities in
efficient and modern ways, leading to smart cities,
which are defined as urban areas that create sustain-
able economic development and high quality of life
by excelling in six key areas, namely, economy, mo-
bility, environment, people, living, and government
(Montemayor et al., 2015).
In smart cities, traditional infrastructures as well
as new services are merged, coordinated, and inte-
grated using innovative digital technologies (Batty
et al., 2012). Hence, IT technologies such Artificial
Intelligence (AI)-based systems are a cornerstone as-
pect of smart cities, with AI acting as a catalyst for
areas such as smart urban modeling, intelligent in-
frastructures, smart transportation, smart governance,
sustainability, smart education, and smart health solu-
tions, to name a few (Bhattacharya et al., 2020).
In particular, computer-vision-based intelligent
systems contribute to smart city’s applications such
as smart surveillance (Ryabchikov et al., 2020), smart
security (Khan et al., 2019), smart traffic management
(Gupta and Sundar, 2020), and smart mobility (Fortes
et al., 2021). Intelligent vision systems can thus im-
prove people’s quality of life by helping drivers with
finding vacant parking space (Bravo et al., 2013) or
aiding visually impaired to safely travel around the
smart city (Nasralla et al., 2019).
Intelligent vision systems are also embedded in a
variety of intelligent agents (Olszewska, 2020) such
as inspection robots (Sui, 2021), cleaning robots
(Narang et al., 2021), etc. They can also be inte-
grated into mobile ground robots for assistive oper-
ations in public spaces (Grzeskowiak et al., 2021) or
into unmanned aerial vehicles (UAV) for data collec-
tion through the smart city (Shirazi et al., 2020).
All these computer-vision-based applications in-
volve automatic object detection (Chen et al., 2021).
Indeed, automatic object detection is used for object
recognition (Wang et al., 2021), scene recognition
(Zeng et al., 2020), activity recognition (Mliki et al.,
996
Olszewska, J.
Snakes in Trees: An Explainable Artificial Intelligence Approach for Automatic Object Detection and Recognition.
DOI: 10.5220/0010993000003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 996-1002
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2020), object tracking (Li et al., 2021), or automated
image annotation (Zhang et al., 2012), which in turn
can be applied to pedestrian detection and surveil-
lance (An et al., 2021), car detection and annotation
(Li et al., 2020), license plate recognition (Huang
et al., 2021), robot navigation (Lin et al., 2021), and
many more applications (Calzado et al., 2018), (Ol-
szewska, 2018).
Therefore, the development of transparent and ex-
plainable artificial intelligence algorithms for intelli-
gent vision systems (Olszewska, 2021) deployed in
smart cities is of prime importance, due to the grow-
ing concern of citizens about, on one hand, their data
privacy and security (Chourabi et al., 2012), and, on
the other hand, the behaviour of the surrounding in-
telligent agents (Zhang et al., 2017).
Over the last decade, computer vision systems
have been more and more relying on machine learn-
ing, and especially on deep learning (Camacho et al.,
2021), which is a very popular and efficient approach.
However, the use of deep learning involves most of
the time very large and unbiased training datasets
(Kishida et al., 2021) with high-resolution images
(Wang et al., 2021), time and energy-consuming pro-
cesses (Liu et al., 2021), resource-intensive compu-
tational power (Prakash et al., 2020), with associ-
ated, extensive costs (Chourabi et al., 2012) as well
as sophisticated equipment (Namiki et al., 2021); all
these demands being not always available in real-
world conditions. Besides, deep learning is not cur-
rently considered as an explainable machine-learning
approach (Gunning et al., 2019).
Since explainable artificial intelligence (XAI) is
very important for users (Ferreira, J. J. and Mon-
teiro, M. S., 2020), (Wilding et al., 2020) and regula-
tors (Winfield et al., 2021), (Prestes et al., 2021), ex-
plainability becomes a ‘sought-after’ non-functional
requirement (Kohl et al., 2019) of AI-based sys-
tems such as intelligent vision systems (Olszewska,
2019b).
Explainability can thus be assessed by internal al-
gorithmic auditing (Raji et al., 2020), software testing
(Black et al., 2022), and/or by verification and valida-
tion of the intelligent system (Corso et al., 2021).
Explainability can be also addressed at an ear-
lier stage of the intelligent-vision system development
(Olszewska, 2019a), i.e. during the system design
(Bryson and Winfield, 2017) and its algorithm de-
sign (Mendling et al., 2021), leading to XAI by Design
(Kearns and Roth, 2020).
Thus, in this work, we propose a novel,
explainable-by-design AI-based algorithm for intelli-
gent vision systems. Our algorithm consists mainly
on the recursive computation of both the computer-
vision method called snakes and the machine-
learning-based decision trees.
Indeed, on one hand, object-of-interest’s shape
(Samani et al., 2021) and closed contours (Funke
et al., 2021) are very important visual feature for
object detection and recognition (Lv et al., 2021).
Therefore, computer-vision techniques such as active
contours (Yezzi et al., 2019) are an efficient and ex-
plainable method to locate, segment, and track an
object. In particular, we have selected the active-
contour method known as ‘snake’ (Muralidhar et al.,
2010), which automatically computes parametric ac-
tive contours to delineate the visual-object shape,
since snakes ally explainability with excellent detec-
tion performance (Olszewska, 2017).
On the other hand, we have adopted decision trees
(DT), which are considered as the most explainable
approach to machine learning (Gunning et al., 2019).
Furthermore, decision trees are efficient for visual ob-
ject detection and recognition applications (Nowozin
et al., 2011), (Olszewska, 2015b).
Thence, our explainable-by-design algorithm can
perform object detection and recognition in both static
or dynamic scenes, depending of the type of input
data - still image (Li et al., 2020) or video frame
(Wang et al., 2019), respectively.
Our algorithm can also process different levels of
granularity, which is important for robust object de-
tection and complex scene description (Wang et al.,
2014).
Moreover, snakes allow object recognition with an
open-set domain (Kishida et al., 2021), without re-
quiring any cumbersome training.
Besides, snakes can be coupled with ontolo-
gies such as the Spatio-Temporal Visual Ontology
(STVO) (Olszewska and McCluskey, 2011), and
therefore, they can directly bridge vision systems
and knowledge-based systems. Furthermore, through
STVO, they can be connected to other ontologies
which are suitable for cutting-edge vision-embedded
technologies such as autonomous systems (Olivares-
Alarcos et al., 2019), cloud-robotic systems (Pig-
naton de Freitas et al., 2020), smart manufacturing
(Hildebrandt et al., 2020), or smart cities (Burns et al.,
2018).
Hence, all this algorithmic design leads to a trans-
parent and efficient visual object detection and auto-
mated semantic scene annotation, while provides an
explainable and energy-efficient solution for intelli-
gent vision agents to be deployed in smart cities.
Thus, the contribution of this paper is the new,
explainable algorithm that allies recursive, multi-
layered snakes with recursive, decision trees for
machine-vision object detection and recognition.
Snakes in Trees: An Explainable Artificial Intelligence Approach for Automatic Object Detection and Recognition
997
The paper is structured as follows. In Section 2,
we present our XAI approach for automatic, visual
object detection and recognition as well as unsuper-
vised, semantic labeling of an image by means of
multi-layer, recursive snakes within induced decision
trees. The resulting annotation system has been suc-
cessfully tested on a challenging database containing
real-world images as reported and discussed in Sec-
tion 3. Conclusions are drawn up in Section 4.
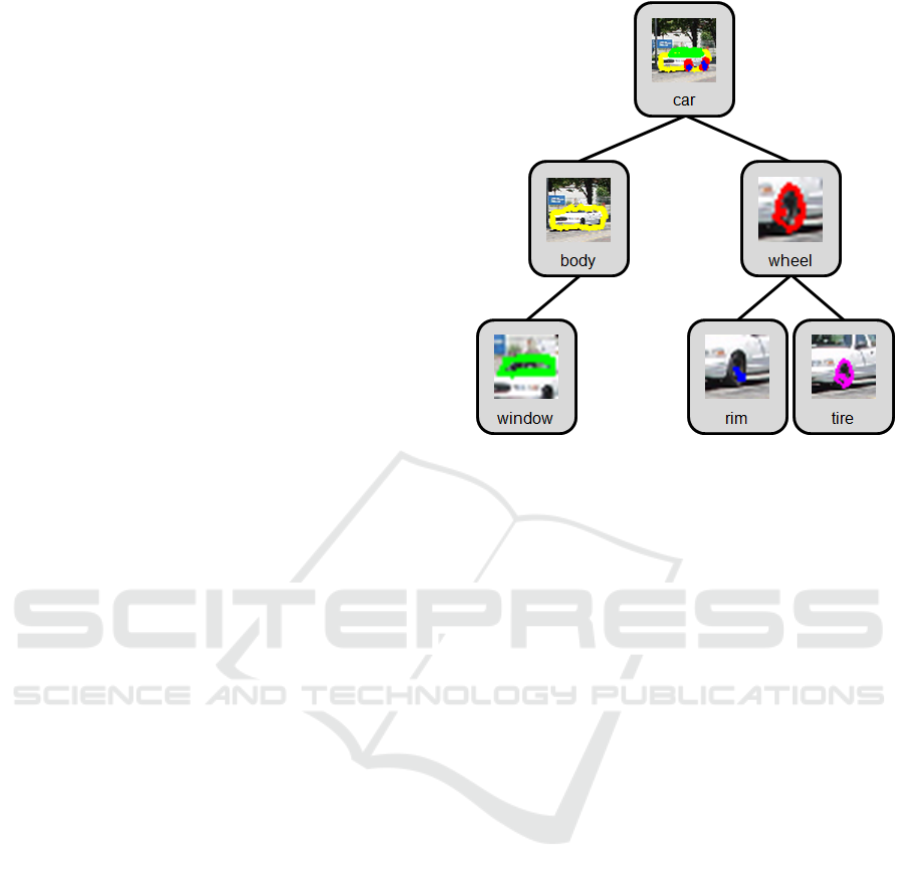
2 OUR PROPOSED APPROACH
In this section, we present our ‘Snakes-in-Trees’ (ST)
approach, which allows both the automatic visual ob-
ject detection and recognition as well as its automatic
semantic labeling, as exemplified in Fig. 1.
For this purpose, our ST algorithm (Algorithm 1)
computes recursively snakes (S) in an input image (I),
in order to detect an object (O) in a robust way against
occlusions and to map the object’s semantic label (L)
granularity for a precise object recognition and image
annotation.
In this work, each snake S is implemented by
a multi-feature active contour (Olszewska, 2015a)
which is defined as a parametric curve C
C
C (s) : [0, 1] −→
R
2
modeled by a B-spline formalism and guided by
both the internal forces (α: elasticity, β: rigidity) re-
sulting from the curve’s mechanical properties and the
external force Ξ
Ξ
Ξ resulting from multiple features of
the input image, as per following dynamic equation:
C
C
C
t
(s, t) = α C
C
C
ss
(s, t)− β C
C
C
ssss
(s, t)+Ξ
Ξ
Ξ. (1)
The recursive computation of snakes S
l+i,k
within
the input image I is performed by applying ith−times
the Eq. (1) to I and leads to the multi-layered (l + i)
partition of I in terms of object-of-interest’s back-
ground (at the layer l + i = l, with i = 0), its fore-
ground (at the layer l + i = l + 1, with i = 1) as well
as the foregrounds of semantically meaningful sub-
objects (at the subsequent layers l + i, with i ≥ 2) of
the object of interest delineated by k snakes at the cor-
responding layers l + i.
Hence, this recursive process enables the auto-
matic detection of coherent and consistent visual ob-
jects, which are described by geometric and metric
properties (Olszewska, 2013). These features serve
to the characterization of the regions extracted by the
snakes and contribute to define the objects or their
subparts in terms of both numeric and semantic con-
cepts.
The latter ones are recursively mapped into
natural-language keywords through the pre-order
traversal of rooted trees that are recursively computed
Figure 1: Overview of our ‘Snakes-in-Trees’ process for the
‘car’ tag object.
by the ST algorithm, allowing the efficient object la-
beling as well as accurate object recognition (see Al-
gorithm 1).
It is worth noting that the decision trees, which are
recursively built by the ST algorithm, ensure a granu-
lar and semantic mapping of the visual objects that are
detected in each layer by the snakes, which are them-
selves recursively computed by the ST algorithm, for
an accurate object detection, recognition, and annota-
tion.
Hence, decision trees are induced in order to de-
fine semantic keywords at each level corresponding
to visual feature defined by each layer of the snakes.
Then, a voting mechanism allows for higher semantic
level decisions in order to recognize the object.
3 RESULTS AND EVALUATION
To validate our transparent algorithmic method for
the automatic visual object detection and recogni-
tion as well as automatic image annotation in context
of smart cities, we used the publicly available MIT
CBCL street scenes database, which contains 35,417
jpg images with a resolution of 1280x960.
We carried out experiments consisting in run-
ning our recursive algorithm implemented in Mat-
Lab on a commercial device with a processor Intel(R)
Core(TM)2 Duo CPU T9300 2.50 GHz, 2 Gb RAM
and the MatLab (Mathworks, Inc.) and applied to the
CBCL database.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
998
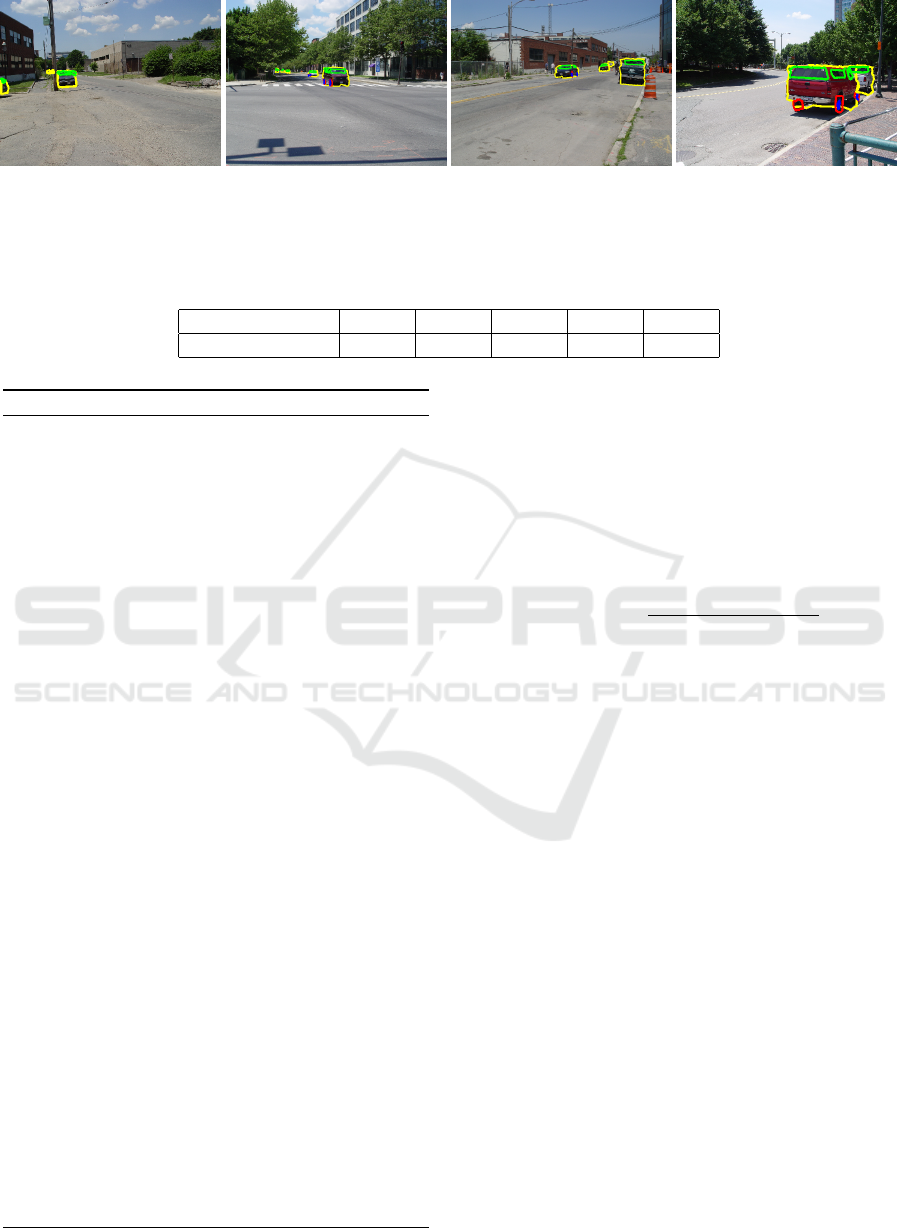
(a) (b) (c) (d)
Figure 2: Examples of results of our recursive ‘Snakes-in-Trees’ method, when applied to the CBCL dataset. Best viewed in
color.
Table 1: Average accuracy of object-of-interest recognition, using approaches of 4(Ren et al., 2015), ♦(Lu et al., 2019),
◦(Liu et al., 2008), (Kim et al., 2004), and our ‘Snakes-in-Trees’ (ST) method.
method 4 ♦ ◦ ST
average accuracy 65.4% 69.5% 73.1% 84.2% 95.6%
Algorithm 1: ST: Snakes in Trees.
Given O, the object of interest to tag;
Given T
O
, the Tree related to the object O;
Given S
l+i,k
, the kth Snake at the l + ith layer;
Given L
O,n
, the label of the root n of the tree T
O
;
Considering
T
O,l+i
, the l + ith level of the tree T
O
;
i = 0;
V = ∅;
r
S
l+i,k
= 0;
ST(S
l+i,k
, T
O
)
L
O,n
=label(head(T
O,l+i
))
S
l+i,k+m
← S
l+i,k
S
l+i,k
= S
l+i,k+m
if ∃S
l+i,k
|(S
l+i,k
L
O,n
) then
r
S
l+i,k
= 1
V = V ∪ {r
S
l+i,k
}
end if
if T
O,l+i,le f t
6= ∅ then
i = i + 1
ST(S
l+i,k
,T
O,l+i,le f t
)
end if
if T
O,l+i,right
6= ∅ then
i = i + 1
ST(S
l+i,k
,T
O,l+i,right
)
end if
if MajorityVote(V) == 1 then
return label(head(T
O
))
end if
end
A sample of obtained results, which have been
computed in few ms, can be found in Figs. 2 (a)-(d).
We can observe that the algorithm has well detected
and recognized the objects of interest as well as their
components, delineating and labeling them appropri-
ately.
To quantitatively assess the accuracy of our al-
gorithm, we adopt the standard criterion (Olszewska,
2019b), as follows:
accuracy =
T P + T N
T P + T N + FP + FN
, (2)
with T P, true positive, T N, true negative, FP,
false positive, and FN, false negative.
Table 1 reports the mean average accuracy, which
is computed as per Eq. (2) in the case of our al-
gorithm (i.e. 95.6%), and compares it to the per-
formance of other state-of-the-art machine-learning
methods for object detection and recognition. On one
hand, we can note that current methods (Wang et al.,
2021) based on deep learning and convolutional neu-
ral networks (Fathima and Merriliance, 2020), such
as Faster R-CNN (Ren et al., 2015) and Grid R-CNN
(Lu et al., 2019), achieve only an accuracy of 65.4%
and 69.5%, respectively. As reported by (Khan et al.,
2020), CBCL dataset images are challenging because
of their low resolution for training as well as testing
neural networks (Jimenez-Bravo et al., 2020). On the
other hand, common decision-tree-based methods,
such as (Liu et al., 2008) and (Kim et al., 2004), have
an accuracy of 73.1% and 84.2%, respectively, and
they involve constraining assumptions such as recog-
nition of very distant classes only or detection of only
centered objects of interest, respectively. Therefore,
our ST algorithm features not only explainability, but
it is also low-spec, cost-effective, time-efficient, and
robust, while being more accurate in comparison with
state-of-the-art approaches.
Snakes in Trees: An Explainable Artificial Intelligence Approach for Automatic Object Detection and Recognition
999

4 CONCLUSIONS
In this paper, we propose an explainable-by-design
algorithm built on snakes within trees for automatic
object detection and recognition. Indeed, we have
developed an efficient XAI algorithm embedding re-
cursive snakes within the recursive pre-order traver-
sal of rooted trees, where each decision tree’s se-
mantic value has been mapped with the visual infor-
mation provided by a layer of the computed snake.
Hence, based on both semantic and visual proper-
ties of the image content, our ‘Snakes-in-Trees’ (ST)
method provides accurate and robust object detection
and recognition as well as image annotation in real-
world conditions, even in case of pose variations or
occlusions of the objects of interest. The ST algo-
rithm is thus well suited for smart cities’ intelligent-
vision-based applications.
REFERENCES
An, H., Hu, H.-M., Guo, Y., Zhou, Q., and Li, B.
(2021). Hierarchical reasoning network for pedestrian
attribute recognition. IEEE Transactions on Multime-
dia, 23:268–280.
Batty, M., Axhausen, K. W., Giannotti, F., Pozdnoukhov,
A., Bazzani, A., Wachowicz, M., Ouzounis, G.,
and Portugali, Y. (2012). Smart cities of the fu-
ture. The European Physical Journal Special Topics,
214(1):481–518.
Bhattacharya, S., Somayaji, S. R. K., Gadekallu, T. R.,
Alazab, M., and Maddikunta, P. K. R. (2020). A re-
view on deep learning for future smart cities. Internet
Technology Letters, pages 1–6.
Black, R., Davenport, J. H., Olszewska, J. I., Roessler, J.,
Smith, A. L., and Wright, J. (2022). Artificial Intel-
ligence and Software Testing: A Practical Guide to
Quality. BCS Press.
Bravo, C., Sanchez, N., Garcia, N., and Menendez, J. M.
(2013). Outdoor vacant parking space detector for im-
proving mobility in smart cities. In Proceedings of
the Portuguese Conference on Artificial Intelligence,
pages 30–41.
Bryson, J. and Winfield, A. (2017). Standardizing ethical
design for artificial intelligence and autonomous sys-
tems. IEEE Computer, 50(5):116–119.
Burns, M., Griffor, E., Balduccini, M., Vishik, C., Huth, M.,
and Wollman, D. (2018). Reasoning about smart city.
In Proceedings of the IEEE International Conference
on Smart Computing, pages 381–386.
Calzado, J., Lindsay, A., Chen, C., Samuels, G., and Ol-
szewska, J. I. (2018). SAMI: Interactive, multi-sense
robot architecture. In Proceedings of the IEEE Inter-
national Conference on Intelligent Engineering Sys-
tems, pages 317–322.
Camacho, A., Varley, J., Zeng, A., Jain, D., Iscen, A., and
Kalashnikov, D. (2021). Reward machines for vision-
based robotic manipulation. In Proceedings of the
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 14284–14290.
Chen, Z.-M., Jin, X., Zhao, B.-R., Zhang, X., and Guo,
Y. (2021). HCE: Hierarchical context embedding for
region-based object detection. IEEE Transactions on
Image Processing, 30:6917–6929.
Chourabi, H., Nam, T., Walker, S., Gil-Garcia, J. R., Mel-
louli, S., Nahon, K., Pardo, T. A., and Scholl, H. J.
(2012). Understanding smart cities: An integrative
framework. In Proceedings of the IEEE Hawaii Inter-
national Conference on System Sciences, pages 2289–
2297.
Corso, A., Moss, R. J., Koren, M., Lee, R., and Kochender-
fer, M. J. (2021). A survey of algorithms for black-box
safety validation of cyber-physical systems. Journal
of Artificial Intelligence Research, 72:377–428.
Fathima, S. A. and Merriliance, K. (2020). Analysis of ve-
hicle detection using region-based convolutional neu-
ral networks (RCNN). Journal of Xi’an University of
Architecture and Technology, 12(7):81–90.
Ferreira, J. J. and Monteiro, M. S. (2020). What are people
doing about XAI user experience? A survey on AI
explainability research and practice. In Proceedings
of HCI International Conference (HCI). LNCS 12201,
Part II, pages 56–73.
Fortes, S., Kulesza, R., and Li, J. J. (2021). A case study of
object recognition from drone videos. In Proceedings
of the IEEE International Conference on Information
and Computer Technologies, pages 84–87.
Funke, C. M., Borowski, J., Stosio, K., Brendel, W., Wal-
lis, T. S. A., and Bethge, M. (2021). Five points to
check when comparing visual perception in humans
and machines. Journal of Vision, 16(3):1–23.
Grzeskowiak, F., Gonon, D., Dugas, D., Paez-Granados, D.,
Chung, J. J., Nieto, J., Siegwart, R., Billard, A., Ba-
bel, M., and Pettre, J. (2021). Crowd against the ma-
chine: A simulation-based benchmark tool to evaluate
and compare robot capabilities to navigate a human
crowd. In Proceedings of the IEEE International Con-
ference on Robotics and Automation (ICRA), pages
3879–3885.
Gunning, D., Stefik, M., Choi, J., Miller, T., Stumpf, S.,
and Yang, G.-Z. (2019). XAI-Explainable artificial
intelligence. Science Robotics, 4(37):1–4.
Gupta, S. and Sundar, B. (2020). A computer vision based
approach for automated traffic management as a smart
city solution. In Proceedings of the IEEE Inter-
national Conference on Electronics, Computing and
Communication Technologies, pages 1–6.
Hildebrandt, C., Kocher, A., Kustner, C., Lopez-Enriquez,
C.-M., Muller, A. W., Caesar, B., Gundlach, C. S., and
Fay, A. (2020). Ontology building for cyber-physical
systems: Application in the manufacturing domain.
IEEE Transactions on Automation Science and Engi-
neering, 17(3):1266–1282.
Huang, Q., Cai, Z., and Lan, T. (2021). A new approach
for character recognition of multi-style vehicle license
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
1000

plates. IEEE Transactions on Multimedia, 23:3768–
3777.
Jimenez-Bravo, D. M., Mutombo, P. M., Braem, B., and
Marquez-Barja, J. M. (2020). Applying Faster R-
CNN in extremely low-resolution thermal images for
people detection. In Proceedings of the IEEE/ACM In-
ternational Symposium on Distributed Simulation and
Real Time Applications, pages 1–4.
Kearns, M. and Roth, A. (2020). Ethical algorithm design.
ACM SIGecom Exchanges, 18(1):31–36.
Khan, G., Samyan, S., Khan, M. U. G., Shahid, M., and
Wahla, S. Q. (2020). A survey on analysis of hu-
man faces and facial expressions datasets. Interna-
tional Journal of Machine Learning and Cybernetics,
11(3):553–571.
Khan, M. M., Ilyas, M. U., Saleem, S., Alowibdi, J. S., and
Alkatheiri, J. S. (2019). Emerging computer vision
based machine learning issues for smart cities. In The
International Research and Innovation Forum, pages
315–322.
Kim, S., Park, S., and Kim, M. (2004). Image classifica-
tion into object/non-object classes. In Proceedings of
the International Conference on Image and Video Re-
trieval, pages 393–400.
Kishida, I., Chen, H., Baba, M., Jin, J., Amma, A., and
Nakayama, H. (2021). Object recognition with con-
tinual open set domain adaptation for home robot. In
Proceedings of the IEEE Winter Conference on Ap-
plications of Computer Vision (WACV), pages 1516–
1525.
Kohl, M. A., Baum, K., Langer, M., Oster, D., Speith, T.,
and Bohlender, D. (2019). Explainability as a non-
functional requirement. In Proceedings of the IEEE
International Requirements Engineering Conference,
pages 363–368.
Li, X., Ma, H., and Luo, X. (2020). Weaklier supervised
semantic segmentation with only one image level an-
notation per category. IEEE Transactions on Image
Processing, 290:128–141.
Li, Y., Peng, R., Li, M., and Fang, C. (2021). Research
on foreground Object recognition tracking and back-
ground restoration in AIoT era. In Proceedings of the
IEEE Asia-Pacific Conference on Image Processing,
Electronics and Computers, pages 292–298.
Lin, S., Wang, J., Xu, M., Zhao, H., and Chen, Z. (2021).
Topology aware object-level semantic mapping to-
wards more robust loop closure. IEEE Robotics and
Automation Letters, 6(4):7041–7048.
Liu, L., Tang, J., Liu, S., Yu, B., Xie, Y., and Gaudiot, J.-L.
(2021). P-RT: A runtime framework to enable energy-
efficient, real-time robotic vision applications on het-
erogeneous architectures. IEEE Computer, 54(4):14–
25.
Liu, Y., Zhang, D., and Lu, G. (2008). Region-based image
retrieval with high-level semantics using decision tree
learning. Pattern Recognition, 41(8):2554–2570.
Lu, X., Li, B., Yue, Y., Li, Q., and Yan, J. (2019). Grid
R-CNN. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 7363–7372.
Lv, H., Zhang, F., and Wang, R. (2021). Robust active con-
tour model using patch-based signed pressure force
and optimized fractional-order edge. IEEE Access,
9:8771–8785.
Mendling, J., Depaire, B., and Leopold, H. (2021). Theory
and practice of algorithm engineering. pages 1–18.
Mliki, H., Bouhlel, F., and M., H. (2020). Human activ-
ity recognition from UAV-captured video sequences.
Pattern Recognition, 100:1–13.
Montemayor, A. S., Pantrigo, J. J., and Salgado, L. (2015).
Special issue on real-time computer vision in smart
citiess. Journal of Real-Time Image Processing,
10:723–724.
Muralidhar, G. S., Bovik, A. C., Giese, J. D., Sampat, M. P.,
Whitman, G. J., Haygood, T. M., Stephens, T. W., and
Markey, M. K. (2010). Snakules: A model-based ac-
tive contour algorithm for the annotation of spicules
on mammography. IEEE Transactions on Medical
Imaging, 29(10):1768–1780.
Namiki, S., Yokoyama, K., Yachida, S., Shibata, T.,
Miyano, H., and Ishikawa, M. (2021). Online ob-
ject recognition using CNN-based algorithm on high-
speed camera imaging: Framework for fast and robust
high-speed camera object recognition based on popu-
lation data cleansing and data ensemble. In Proceed-
ings of the IEEE International Conference on Pattern
Recognition (ICPR), pages 2025–2032.
Narang, M., Rana, M., Patel, J., D’Souza, S., Onyechie, P.,
Berry, S., Tayefeh, M., and Barari, A. (2021). Fight-
ing COVID: An autonomous indoor cleaning robot
(AICR) supported by artificial intelligence and vision
for dynamic air disinfection. In Proceedings of the
IEEE International Conference on Industry Applica-
tions, pages 1146–1153.
Nasralla, M. M., Rehman, I. U., Sobnath, D., and Paiva, S.
(2019). Computer vision and deep learning-enabled
UAVs: Proposed use cases for visually impaired peo-
ple in a smart city. In Proceedings of IAPR Inter-
national Conference on Computer Analysis of Images
and Patterns (CAIP). LNCS 9256, Part I, pages 91–99.
Nowozin, S., Rother, C., Bagon, S., Sharp, T., Yao, B., and
Kohli, P. (2011). Decision tree fields. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision, pages 1668–1675.
Olivares-Alarcos, A., Bessler, D., Khamis, A., Goncalves,
P., Habib, M., Bermejo-Alonso, J., Barreto, M., Diab,
M., Rosell, J., Quintas, J., Olszewska, J. I., Nakawala,
H., Pignaton de Freitas, E., Gyrard, A., Borgo, S.,
Alenya, G., Beetz, M., and Li, H. (2019). A re-
view and comparison of ontology-based approaches to
robot autonomy. The Knowledge Engineering Review,
34:1–38.
Olszewska, J. I. (2013). Semantic, automatic image anno-
tation based on multi-layered active contours and de-
cision trees. International Journal of Advanced Com-
puter Science and Applications, 4(8):201–208.
Olszewska, J. I. (2015a). Active contour based optical char-
acter recognition for automated scene understanding.
Neurocomputing, 161(C):65–71.
Olszewska, J. I. (2015b). “Where Is My Cup?” – Fully auto-
matic detection and recognition of textureless objects
Snakes in Trees: An Explainable Artificial Intelligence Approach for Automatic Object Detection and Recognition
1001

in real-world images. In Proceedings of IAPR Inter-
national Conference on Computer Analysis of Images
and Patterns (CAIP). LNCS 9256, Part I, pages 501–
512.
Olszewska, J. I. (2017). Active-contours based-on face
emotion patterns. In Proceedings of IAPR Interna-
tional Conference on Computer Analysis of Images
and Patterns (CAIP) Workshop, pages 59–70.
Olszewska, J. I. (2018). Discover intelligent vision soft-
wares. In DDD Scotland.
Olszewska, J. I. (2019a). D7-R4: Software development
life-cycle for intelligent vision systems. In Proceed-
ings of the International Conference on Knowledge
Engineering and Ontology Development (KEOD),
pages 435–441.
Olszewska, J. I. (2019b). Designing transparent and au-
tonomous intelligent vision systems. In Proceedings
of the International Conference on Agents and Artifi-
cial Intelligence (ICAART), pages 850–856.
Olszewska, J. I. (2020). Developing intelligent vision soft-
ware and the future of AI. In ACM Future Worlds
Symposium (FWS).
Olszewska, J. I. (2021). Algorithms for intelligent vision
systems. In Canadian Mathematical Society 75th An-
niversary Summer Meeting (CMS).
Olszewska, J. I. and McCluskey, T. L. (2011). Ontology-
coupled active contours for dynamic video scene un-
derstanding. In Proceedings of the IEEE International
Conference on Intelligent Engineering Systems, pages
369–374.
Pignaton de Freitas, E., Olszewska, J. I., Carbonera, J. L.,
Fiorini, S., Khamis, A., Sampath Kumar, V. R., Bar-
reto, M., Prestes, E., Habib, M., Redfield, S., Chibani,
A., Goncalves, P., Bermejo-Alonso, J., Sanz, R.,
Tosello, E., Olivares Alarcos, A., Konzen, A. A.,
Quintas, J., and Li, H. (2020). Ontological concepts
for information sharing in cloud robotics. Journal
of Ambient Intelligence and Humanized Computing,
pages 1–14.
Prakash, A., Ramakrishnan, N., Garg, K., and Srikanthan,
T. (2020). Accelerating computer vision algorithms
on heterogeneous edge computing platforms. In Pro-
ceedings of the IEEE Workshop on Signal Processing
Systems, pages 1–6.
Prestes, E., Houghtaling, M., Goncalves, P., Fabiano, N.,
Ulgen, O., Fiorini, S. R., Murahwi, Z., Olszewska,
J. I., and Haidegger, T. (2021). IEEE 7007: The first
global ontological standard for ethical robotics and
automation systems. IEEE Robotics and Automation
Magazine, 28(4):120–124.
Raji, I. D., Smart, A., White, R. N., Mitchell, M., Gebru,
T., Hutchinson, B., Smith-Loud, J., Theron, D., and
Barnes, P. (2020). Closing the AI accountability gap:
Defining an end-to-end framework for internal algo-
rithmic auditing. In Proceedings of the ACM Confer-
ence on Fairness, Accountability, and Transparency,
pages 33–44.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. Advances in Neural Information
Processing Systems, pages 91–99.
Ryabchikov, I., Teslya, N., and Druzhinin, N. (2020).
Integrating computer vision technologies for smart
surveillance purpose. In Proceedings of the
IEEE Conference of Open Innovations Association
(FRUCT), pages 392–401.
Samani, E. U., Yang, X., and Banerjee, A. G. (2021). Vi-
sual object recognition in indoor environments using
topologically persistent features. IEEE Robotics and
Automation Letters, 6(4):7509–7516.
Shirazi, M. S., Patooghy, A., Shisheie, R., and Haque,
M. M. (2020). Application of unmanned aerial vehi-
cles in smart cities using computer vision techniques.
In Proceedings of the IEEE International Smart Cities
Conference, pages 1–7.
Sui, X. (2021). Research on object location method of in-
spection robot based on machine vision. In Proceed-
ings of the IEEE International Conference on Intelli-
gent Transportation, Big Data and Smart City, pages
724–727.
Wang, J., Sun, K., Cheng, t., Jiang, B., Deng, C., Zhao, Y.,
Liu, D., Mu, Y., Tan, M., Wang, X., Liu, W., and Xiao,
B. (2021). Deep high-resolution representation learn-
ing for visual recognition. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 43(10):3349–
3364.
Wang, J. K., Yan, F., Aker, A., and Gaizauskas, R. (2014). A
Poodle or a Dog? Evaluating automatic image anno-
tation using human descriptions at different levels of
granularity. In Proceedings of the International Con-
ference on Computational Linguistics, pages 38–45.
Wang, Z., Yan, X., Han, Y., and Sun, M. (2019). Ranking
video salient object detection. In Proceedings of the
ACM International Conference on Multimedia (MM),
pages 873–881.
Wilding, S., Walker, P., Clinton, S., Williams, D., and Ol-
szewska, J. I. (2020). Safe human-computer interface
based on an efficient image processing algorithm. In
Proceedings of the IEEE International Symposium on
Computational Intelligence and Informatics (CINTI),
pages 65–70.
Winfield, A. F. T., Booth, S., Dennis, L. A., Egawa,
T., Hastie, H., Jacobs, N., Muttram, R., Olszewska,
J. I., Rajabiyazdi, F., Theodorou, A., Underwood, M.,
Wortham, R. H., and Watson, E. (2021). IEEE P7001:
A proposed standard on transparency. Frontiers on
Robotics and AI, 8:1–16.
Yezzi, A., Sundaramoorthi, G., and Benyamin, M. (2019).
PDE acceleration for active contours. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 12310–12320.
Zeng, H., Song, X., Chen, G., and Jiang, S. (2020). Learn-
ing scene attribute for scene recognition. IEEE Trans-
actions on Multimedia, 22(6):1519–1530.
Zhang, D., Islam, M. M., and Lu, G. (2012). A review
on automatic image annotation techniques. Pattern
Recognition, 45(1):346–362.
Zhang, T., Li, Q., Zhang, C.-S., Liang, H.-W., Li, P., Wang,
T.-M., Li, S., Zhu, Y.-L., and Wu, C. (2017). Current
trends in the development of intelligent unmanned au-
tonomous systems. Frontiers of Information Technol-
ogy and Electronic Engineering, 18(1):68–85.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
1002
