
SERIES: A Task Modelling Notation for Resource-driven Adaptation
Paul A. Akiki, Andrea Zisman and Amel Bennaceur
School of Computing and Communications, The Open University, Milton Keynes, U.K.
Keywords: Task Modelling Notation, Resource-driven Adaptation, Enterprise System.
Abstract: Enterprise Systems (ESs) can make use of tasks that depend on various types of resources such as robots and
raw materials. The variability of resources can cause losses to enterprises. For example, the malfunctioning
of robots at automated warehouses could delay product deliveries and cause financial losses. These losses can
be avoided if resource-driven adaptation is supported. In order to support resource-driven adaptation in ESs,
this paper presents a task modelling notation called SERIES, which is used for specifying the tasks of ESs at
design time and the enterprise-specific task variants and property values at runtime. SERIES is complemented
by a visual tool. We assessed the usability of SERIES using the cognitive dimensions framework. We also
evaluated SERIES by developing resource-driven adaptation examples and measuring the performance over-
head and source-code intrusiveness. The results showed that SERIES does not hinder performance and is non-
intrusive.
1 INTRODUCTION
Enterprise Systems (ESs) can make use of tasks that
represent activities, which depend on various types of
resources. There are several reasons for resources to
be variable. Examples are unexpected hardware fail-
ures, excess workloads, or lack of (raw) materials. It
is costly to over-provision resources to compensate
for short-term resource variability. The lack of re-
sources prevents ESs from executing important tasks
on time, thereby, causing losses to enterprises and
people. For example, the malfunctioning of robots at
automated warehouses could delay product deliveries
and drive customers to buy from a competitor. Medi-
cally-critical tasks could be obstructed if low-priority
tasks deplete medical supplies facing shortages.
Resource-driven adaptation is a type of self-adap-
tation (Cheng et al., 2009; De Lemos et al., 2013)
driven by resource variability. The unavailability of
resources to carry out a certain task may trigger an
adaptation that involves the execution of a similar
task that requires less resources, substitution of alter-
native resources, execution of tasks in a different or-
der, or even cancelling execution of low-priority tasks.
Existing resource-driven adaptation approaches
work in different ways like disabling optional compo-
nents (Xu & Buyya, 2019), reducing the data returned
by a query (Gotz et al., 2015), changing system con-
figurations through policies (Keeney & Cahill, 2003),
and reducing source-code that consumes a lot of com-
putational resources (Christi et al., 2017). While the
abovementioned approaches do not focus on tasks in
their decision-making process, others do (Perttunen et
al., 2007; Sousa et al., 2006). However, these ap-
proaches do not consider characteristics that are im-
portant to support enterprise-specific adaptation deci-
sions, as explained next.
ESs execute tasks that support enterprises from
different domains (Lucas et al., 2013). Given that
these tasks are different and that the needs of enter-
prises vary, adaptation decisions should consider
characteristics like (i) task priorities; (ii) applicability
of an adaptation type to a task; and (iii) task variants
that differ according to parameter values, user roles,
and resource consumption. The priority of tasks can
be different due to corporate decisions. Additionally,
parameter values and user roles, that distinguish task
variants, differ based on enterprises’ data. Hence, a
task modelling notation is needed for specifying tasks
in ESs at design time and for setting enterprise-spe-
cific task variants and properties at runtime.
The abovementioned resource-driven adaptation
approaches that focus on tasks do not offer a task
modelling notation. Furthermore, existing task mod-
elling notations, like ConcurTaskTrees CTT (Paterno
et al., 1997) and HAMSTERS (Martinie et al., 2011),
also have missing characteristics (i)-(iii) above that
are useful for resource-driven adaptation, as dis-
cussed in this paper.
Akiki, P., Zisman, A. and Bennaceur, A.
SERIES: A Task Modelling Notation for Resource-driven Adaptation.
DOI: 10.5220/0011001800003179
In Proceedings of the 24th International Conference on Enterprise Information Systems (ICEIS 2022) - Volume 2, pages 29-39
ISBN: 978-989-758-569-2; ISSN: 2184-4992
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
29
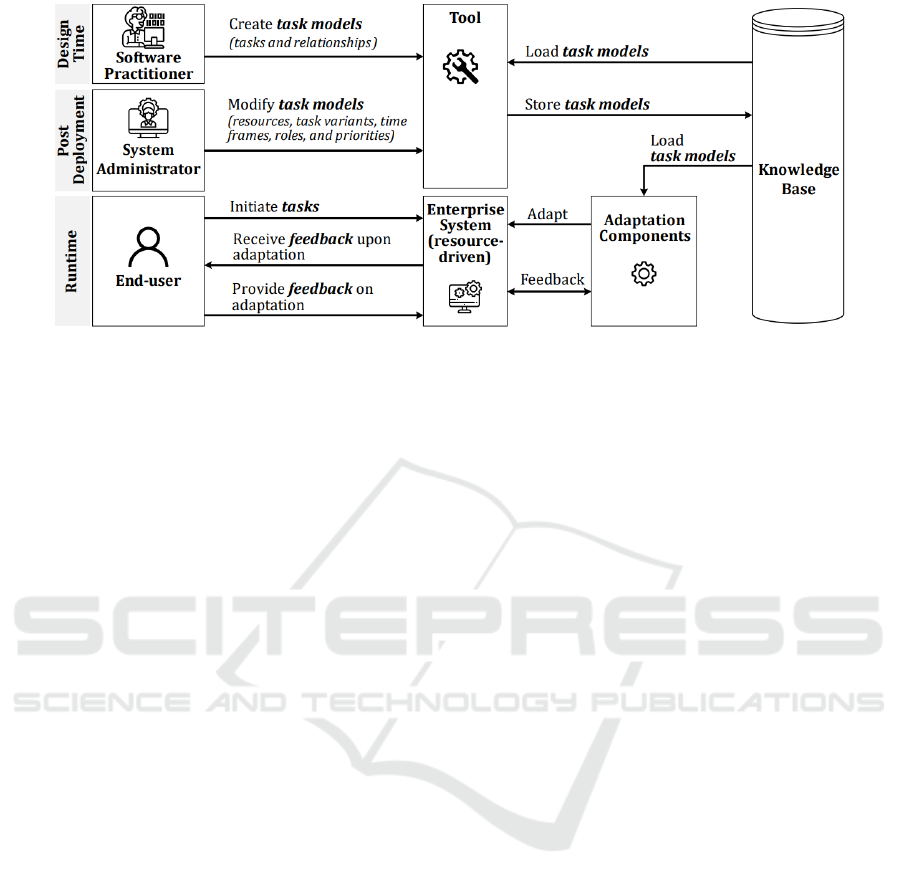
Figure 1: Architecture summarising the use of SERIES task models for resource-driven adaptation.
Given the limitations of existing task modelling
notations in terms of what they can represent, in this
paper, we propose SERIES (taSk modElling notation
for Resource-driven adaptatIon of Enterprise Sys-
tems). SERIES is a task modelling notation that sup-
ports resource-driven adaptation during the develop-
ment and runtime configuration of ESs. SERIES is
based on CTT (Paterno et al., 1997) - a notation for
representing task models hierarchically using a
graphical syntax. SERIES has a supporting tool to be
used by software practitioners and system administra-
tors, as shown in Figure 1. Software practitioners can
create, at design time, task models that contain the
tasks of an ES; and system administrators can extend
these models, at runtime, by adding enterprise-spe-
cific information such as task priorities, task variants,
and properties related to end-user feedback.
We assessed the usability of SERIES and its tool
using the cognitive dimensions framework (Green &
Petre, 1996). We also evaluated SERIES by develop-
ing resource-driven adaptation examples and measur-
ing its performance overhead and source-code intru-
siveness. This evaluation was executed by using ad-
aptation components (Figure 1) we proposed in pre-
vious work (Akiki et al., 2021). These components
were integrated into the source code of a prototype
system using .NET actions filters (Larkin et al., 2021).
The results of the evaluation showed that the use
of SERIES does not hinder performance and is non-
intrusive. The contributions of this paper are:
a task modelling notation for resource-driven ad-
aptation; and
a tool for software practitioners and system ad-
ministrators to create and modify task models us-
ing the proposed notation.
The remainder of this paper is structured as fol-
lows. In Section 2 we discuss existing task modelling
notations. In Sections 3 and 4 we present SERIES and
its supporting tool, respectively. In Section 5 we eval-
uate the work in terms of usability, performance, and
intrusiveness. Finally, in Section 6, we conclude our
work and discuss directions for future work.
2 RELATED WORK
This section provides a brief overview of existing task
modelling notations and their shortcomings in the de-
velopment of ESs that use resource-driven adaptation.
This section also briefly discusses feature modelling
notations.
2.1 Task Modelling Notations
Task modelling notations are used to represent task
models, which comprise tasks and relationships that
describe how to perform activities. These notations
have been used by various model-based development
approaches that target user interfaces (Calvary et al.,
2003), serious games (Vidani & Chittaro, 2009), and
collaborative learning systems (Molina et al., 2014).
Several task modelling notations were proposed
as described by existing surveys (Guerrero-García et
al., 2012; Limbourg & Vanderdonckt, 2004; Martinie
et al., 2019). Some notations like UAN (Hartson &
Gray, 1992) and GOMS (Kieras, 2004) are textual,
while other notations like CTT and HAMSTERS are
graphical. In general, task modelling notations follow
a hierarchical structure. Hence, graphical notations
are used to visualise a hierarchy of tasks and relation-
ships in a way that is easier to interpret (e.g., by soft-
ware practitioners and system administrators).
Task modelling notations support various model-
ling operators and task types. Some notations offer
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
30

more operators than others. For example, AMBOSS
(Giese et al., 2008), HTA (Annett, 2003), GTA (Van
Der Veer et al., 1996), and Diane+ (Tarby & Barthet,
1996) have more operators than TSK (Johnson &
Hyde, 2003), GOMS, and UAN. CTT and UsiXML
(Limbourg et al., 2004) are notations that offer the
most types of operators. Examples of these operators
include interruption and optionality, which describe
tasks and their relationships. With the interruption op-
erator, a task is suspended until another task finishes
its work, or a task is completely disabled by another
one. The optionality operator either specifies that a
task is optional or gives a choice between multiple
tasks so that when one task starts the others are disa-
bled. HAMSTERS offers a wider variety of task types
and supports extending task types with new ones.
Existing task modelling notations are useful for
representing tasks and relationships (Martinie et al.,
2019) but are not sufficient for developing ESs that
support resource-driven adaptation. Existing nota-
tions do not support the association of resource types
and priorities with tasks, which are important to iden-
tify potentially adaptable tasks due to variations in
certain resource types. Furthermore, these notations
do not support task variants that differ according to
priorities, resource consumption, user roles, and pa-
rameters. In situations in which there are variations in
resources only tasks with lower priorities would be
adapted, rather than adapting the task in all cases.
Another issue is concerned with the lack of stere-
otypes (tags) indicating which adaptation types apply
to a task. If a task requires only a certain type of re-
source, the system cannot perform resource substitu-
tion as an adaptation action and should consider an-
other type of adaptation (e.g., delay the task until the
resource becomes available).
Furthermore, in the case of an adaptation action,
it is useful to give feedback to end-users about the ra-
tionale for the action and to get feedback from them
to inform the system whether it should improve its
adaptation type choices. However, existing notations
do not support properties for specifying how a system
should present and receive adaptation-related feed-
back to and from end-users.
2.2 Feature Modelling Notations
A Feature Model is a hierarchical organisation repre-
senting the constraints for valid configurations in a
Software Product Line (Hallsteinsen et al., 2008).
Similar to existing task modelling notations, fea-
ture modelling notations do not support resource-
driven adaptation. More specifically, feature model-
ling notations do not allow for the representation of
resource types; priorities that differ according to pa-
rameter values, user roles, timeframes, and resource
intensiveness; information that affects which adapta-
tion types are applicable; and configuration infor-
mation regarding whether and how feedback is elic-
ited from the end-users and presented to them.
While modelling of variants is required to support
resource-driven adaptation, those variants are used to
distinguish among different ways of executing a task,
and not to distinguish among different products. Our
aim is to be able to represent explicit concrete tasks
rather than high-level features. Task models support
temporal operators that are useful for anticipating
which task will be executed next and, therefore, sup-
port adaptation decisions.
2.3 Why We Chose to Extend CTT
As we explained in Section 2.1, existing task model-
ling notations have useful features such as tasks and
relationships, but they also lack some characteristics
that are important for supporting resource-driven ad-
aptation for ESs. Based on our study of existing nota-
tions, we realised that notations like CTT, HAM-
STERS, and UsiXML could be extended to support
resource-driven adaptation. We decided to propose
SERIES as an extension of CTT given its wide use in
academia, government, and industry: its tool has been
downloaded over 26,000 times and has over 10,000
registered users (Vigo et al., 2017).
Additionally, CTT supports useful task types like
the system task that SERIES extends with variants.
Furthermore, CTT tasks can be associated with User
Interface (UI) elements (Calvary et al., 2003). This is
useful for displaying adaptation-related feedback to
end-users on the UI. Rigole et al. (2007) used CTT in
an approach for gradual component deployment to
avoid needless consumption of computing resources
on mobile devices. However, they do not propose any
extensions of CTT as we shall do in this paper.
3 THE SERIES NOTATION
SERIES offers task types and properties that support
resource-driven adaptation. Its meta-model is shown
in Figure 2. The concepts from this meta-model are
illustrated by examples in Figure 3 as excerpts of SE-
RIES task models. Figure 3 shows examples of a re-
tail store website and an automated warehouse system.
SERIES task models represent information that is in-
terpreted by resource-driven adaptation components
(refer to Figure 1). However, SERIES does not aim to
represent procedural logic like the Business Process
SERIES: A Task Modelling Notation for Resource-driven Adaptation
31
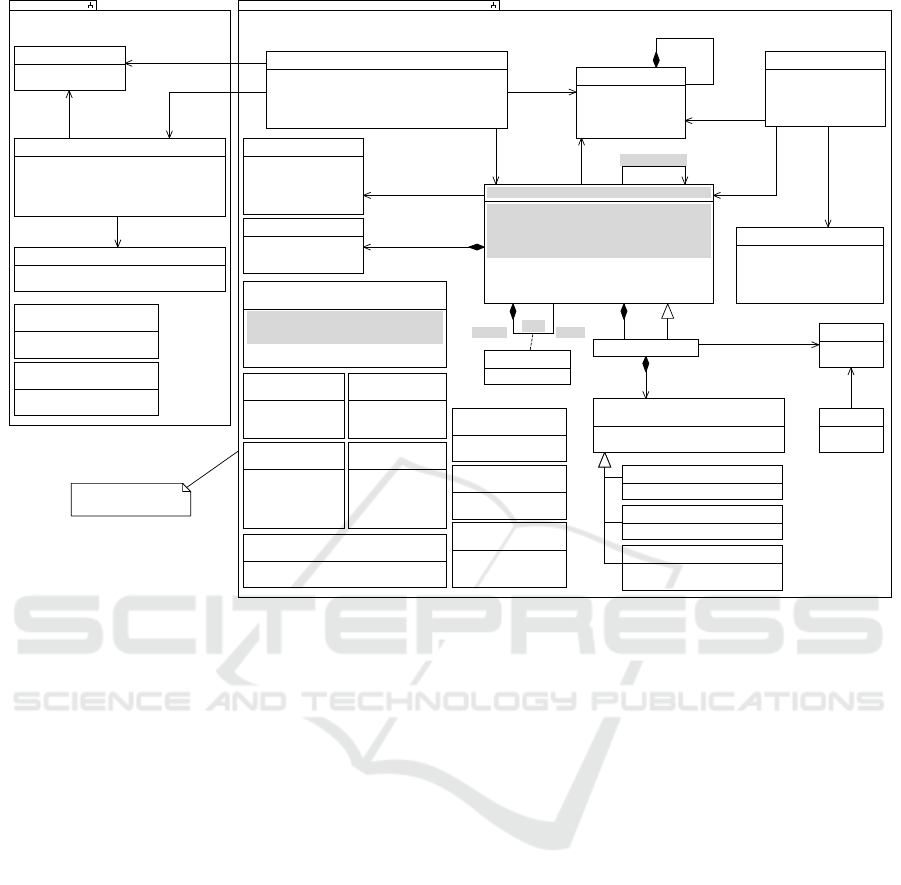
Figure 2: Meta-model of SERIES represented as a class diagram.
Model and Notation (von Rosing et al., 2015). The
term behaviour in “ResourceBehaviourType” on the
meta-model (Figure 2) is an enumeration for a con-
figuration property and does not indicate that SERIES
aims to support procedural logic. In the following text,
the names of the meta-model elements are italicised.
3.1 What SERIES Uses from CTT
SERIES incorporates from CTT the concepts of tasks
and relationships with temporal operators, which are
represented in Figure 2 by the Task class and its self-
association “is followed by” and property Following-
TaskTemporalOperator. Tasks are connected using
relationships that are annotated with temporal opera-
tors, which express how the Tasks relate to each other.
As shown in Figure 3(a), the Task “Search for Item”
enables the Task “Get Item Details”.
SERIES also incorporates from CTT three task
types: abstract, interaction, and application, which are
represented within the TaskType enumeration (Figure
2). Abstract tasks require complex actions and are
broken down into child (sub) Tasks, which are repre-
sented on the Task class by the parent-child self-com-
position and ParentTask association class (Figure 2).
Examples of abstract tasks are “Get Item Details” and
“Prepare Order” from Figure 3 (a) and (b) respec-
tively. Interaction tasks involve user interactions with
the system like “Search for Item” from Figure 3(a).
Application tasks are performed entirely by the sys-
tem. An example of an application Task is “Get Item
Information” (Figure 3(a)). All the other concepts
from the meta-model are characteristics of SERIES.
3.2 SERIES Meta-model
The SERIES meta-model (Figure 2) includes various
concepts that are needed for supporting resource-
driven adaptation in ESs. These concepts are ex-
plained in the following subsections alongside exam-
ples from the task models shown in Figure 3.
3.2.1 Resource Types
ResourceTypes represent the varieties of resources re-
quired by Tasks. A ResourceType has a Consumption-
Type (reusable or depletable) and a BehaviourType
(static or dynamic). A reusable ResourceType is
available to another Task after the Task that is using
it is done, whereas a depletable one is used once. A
static ResourceType does not have a behaviour
whereas a dynamic one has a behaviour. Adaptation
Tasks
Task
+Id: int {id}
+Name: string
+Desc ription: str in g
+Type: TaskType
+ExecutionType: TaskExecutionType
+FollowingTaskTemporalOperator: TemporalOperator
+AdaptationTypeChoice: AdaptationTypeChoice
+FeedbackFromUser: FeedbackFromUser
+FeedbackLocation: FeedbackLocation
TaskCategory
+Id: int {id}
+Name: string
+IsMonitored: bool
+Has
1
1..*
+Has
+Parent
0..1
+Child
0..*
+Has
+Parent
0..1
+Child
0..*
+Has
0..*
0..1
+Has
0..* 0..1
Parameter
+Id: int {id}
+Name: string
+DataType: string
+IsOptional: bool
+Type: ParameterType
+Has
0..*
1
TaskVariant
+Is Followed By
1
0..1
TaskParent
+IsMandatory: bool
+Has
0..* 1..*
1..*
+Has
1..*
+Has
1
0..*
«abstract»
ParameterCondition
+Id: int {id}
+ComparisonOperator: ComparisonOperator
ValueSetParameterCondition
+ValueSet: L ist<string>
RangeParameterCondition
+FromValue: string
+ToValue: string
SingleValueParameterCondition
+Value: string
+Has
0..*0..1
+Has
1..*
1..*
+Has
0..*
0..1
ServiceMethod
+Id: int {id}
+ServiceName: string
+MethodName: string
«enumeration»
TaskType
Abstract
Interaction
Application
SubstitutableApplicationTaskVariant
NonSubstitutableApplicationTaskVariant
«enumeration»
TaskExecutionType
FollowedByInteraction
FireAndForget
«enumeration»
TaskPriority
Low
Medium
High
«enumeration»
ComparisonOperator
Equal
NotEqual
In
NotIn
Between
«enumeration»
ParameterType
Input
InputChangeable
TaskResourceTypeAssignment
+Id: int {id}
+AppliesToChildTasks: bool
+ResourceIntensiveness: double
+Substitutability: ResourceTypeSubstitutability
«optional»+Quantity: double
TaskPriorityAssignment
+Id: int {id}
+PriorityValue: TaskPriority
+Has
1
1
+Has
0..*
1
Resources
+Has
1..*
1
ResourceTypeCategory
+Id: int {id}
+Name: string
ResourceType
+Id: int {id}
+Name: string
+ConsumptionType: ResourceConsumptionType
+BehaviourType: ResourceBehaviourType
+AvailableQuantity: double
+Has
1..*
1
MeasurementUnit
+Id: int {id}
+Name: string
«enumeration»
ResourceConsumptionType
Reusable
Depletable
«enumeration»
ResourceBehaviourType
Static
Dynamic
+Has
0..1
0..*
+Has
0..*
0..1
«enumeration»
ResourceTypeSubstitutabilty
Strict
Flexible
TimeFrame
+Id: int {id}
+FromTime : Time
+ToTime: Time
«optional»+FromDayOfWeek: int
«optional»+ToDayOfWeek: int
User
+Id: int {id}
+Name: string
Role
+Id: int {id}
+Name: string
«enumeration»
AdaptationTypeChoice
Automated
User
«enumeration»
FeedbackFromUser
Request
Disable
«enumeration»
FeedbackLocation
UIElement
Panel
None
The grey parts are from
the CTT notation.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
32
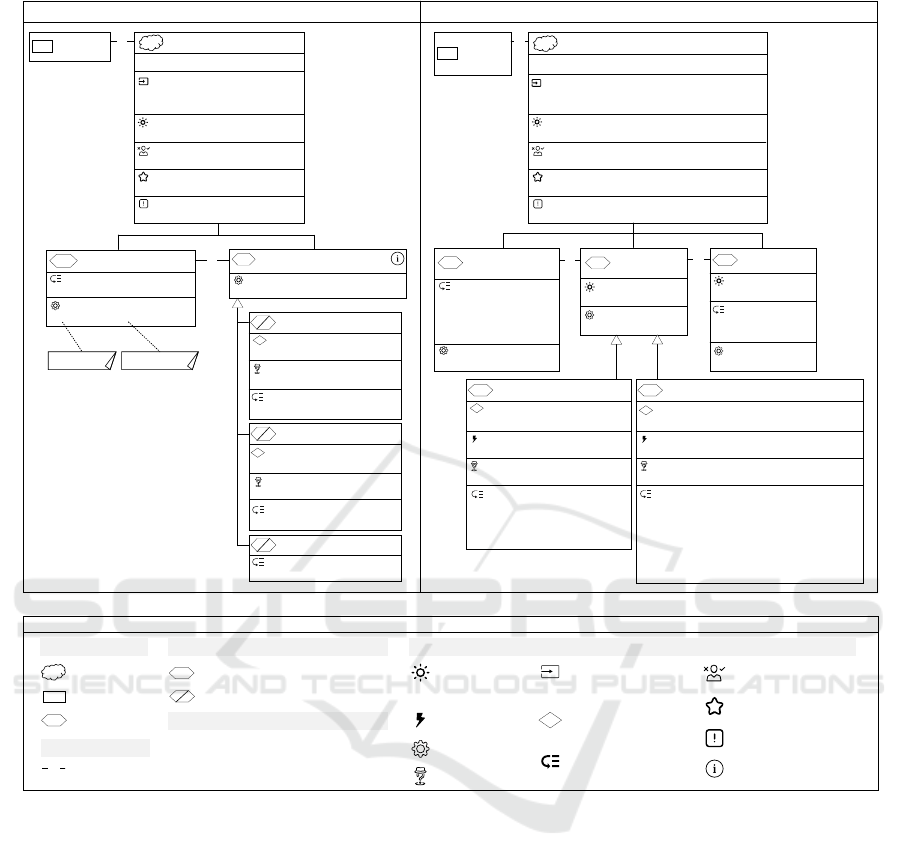
Figure 3: SERIES notation demonstrated by excerpts of two task model examples.
choices are done based on the ConsumptionType and
BehaviourType. For example, certain Tasks are
preemptively restricted from using scarce depletable
resources. A ResourceType has an AvailableQuantity
specified in terms of a MeasurementUnit (e.g., litres).
Tasks are associated with their required Resource-
Types as denoted by TaskResourceAssignment in Fig-
ure 2. The ResourceTypes that are assigned to Tasks
are marked as either strict or flexible. Strict Resource-
Types cannot be substituted with alternatives. Hence,
in resource variability situations the system should
seek another adaptation choice. Flexible Resource-
Types are substitutable with alternatives.
Example. As Figure 3 shows, the Tasks “Get Item
Details”, “Prepare Order”, and “Pack Items in a Box”
require CPUs, robots, and boxes respectively. CPUs
are reusable static, robots are reusable dynamic, and
boxes are depletable static. Additionally, as shown in
Figure 3(b), “Box” is marked as strict for the Task
“Pack Items in a Box” whereas “Stickers” is marked
as flexible for the Task “Decorate Box”.
3.2.2 Service Methods, Parameters, and
Task Execution Types
Each Task has a ServiceMethod, which represents the
function in the ES’s source code that is called when
the Task is executed. Method calls are intercepted by
the system to make adaptation decisions. The method
call’s corresponding Task is partly identified by relat-
ing the method’s code name to a ServiceMethod in the
task model. Tasks have Parameters that represent
data values, which are passed to the corresponding
ServiceMethod and are available during its execution.
GetItemDetails
Parameters
SearchText : string <<input>>
ItemType: string <<input>>
GetRecommendedItems
Roles
VIP-Customer, Administrator
V
Variant1
Priority
High
V
Default
GetItemInformation
<<followed-by-interaction>>
Priority
High
>>
ParameterConditions
ItemType in (Books, Media)
Roles
Any
V
Variant2
ResourceTypes
CPU <<strict>>
Searc h
forItem
>>
Interaction task
Legend
Application task
V Substitutable application task variant
Abstract task
<<followed-by-interaction>>
<<fire-and-forget>>
CTTtasktypes
SERIES extendedtasktypes
Resource Types
Parameters
Priority
(High, Medium, Low) for
Time Frame [From, To]
and Parameter Condition
SERIESextendedtaskproperties
Roles (of users)
Service Method
<<input>>
<<strict>>
<<flexible>>
ServiceMethod
Item.GetItemInformation
ServiceMethod
Item.GetItemRecommendations
RetailStoreWebsite AutomatedWarehouseSystem
V Non-substitutable application task variant
Resource
Intensiveness
>>
PackItems
inaBox
ParameterConditions
PackMode = “Random”
Roles
Any
V
PackRandomly
Priority
High
{TimeFrame=8:00 to 16:00}
Medium
{TimeFrame=16:01 to 7:59}
LocateItems
inWarehouse
<<fire-and-forget>>
Priority
High
{TimeFrame=8:00 to 16:00}
Medium
{TimeFrame= 16:01 to 7:59}
>>
ParameterConditions
PackMode = “ByItemType”
V
PackbyItemType
PrepareOrder
Parameters
PackMode : PackModelEnum <<input, changeable>>
Order.CustomerType: CustomerType <<input>>
Priority
High
{TimeFrame=8:00 to 16:00, CustomerType=”VIP”}
Medium
{TimeFrame=16:01 to 7:59, CustomerType=”VIP”}
Low
{TimeFrame=Any, CustomerType!=”VIP”}
ResourceTypes
Robot, Quantity=1 <<flexible>>
ResourceTypes
Box <strict>>
ServiceMethod
Order.PackItems
DecorateBox
ResourceTypes
Stickers <<flexible>>
ResourceIntensiveness
Robot = RI1
Priority
Low
{TimeFrame=Any}
>>
Task enabling
(a) (b)
(c)
C
C
Roles
Any
ParameterConditions
None
C
C
Priority
High
Priority
Low
ResourceIntensiveness
Robot = RI2
Parameter Conditions
C
ServiceMethod
Order.LocateItems
ServiceMethod
Order.DecorateBox
CTTrel ationship
Execute
Order
Batch
>>
Adaptation Type Choice
(Automated, User)
Feedback from User
(Request, Disable)
Feedback Location
(UI Element, Panel, None)
AdaptationTypeChoice
Automated
Feed backfromUser
Request
Feed backLocation
UI Element
AdaptationTypeChoice
Automated
Feed backfromUser
Request
Feed backLocation
Panel
Class Name Method Name
<<input, changeable>>
Description of a task’s
purpose
SERIES extendedtaskexecutiontypes
SERIES: A Task Modelling Notation for Resource-driven Adaptation
33

Each Task has a TaskExecutionType that is either
fire-and-forget or followed-by-interaction. The re-
sults of a fire-and-forget Task can be viewed at a later
stage. On the other hand, the results of a followed-by-
interaction Task are needed directly after the Task is
done because the end-users need to perform addi-
tional interactions with the system based on these re-
sults. TaskExecutionTypes are used to determine
whether delaying a Task is a viable adaptation option
when resources are unavailable.
Example. As shown in Figure 3(a), the TaskExe-
cutionType of “Get Item Details” is “followed-by-in-
teraction”. Hence, once the results of this Task are
shown the end-users will perform interactions like se-
lecting an item from the results or searching for other
items. On the other hand, as shown in Figure 3(b), the
TaskExecutionType of “Prepare Order” is “fire-and-
forget” because this Task is executed as part of a batch
and its results are viewed later.
3.2.3 Task Priorities, Task Variants, Roles,
and Parameter Conditions and Types
TaskPriorities indicate the importance of Tasks and
are needed to decide on which Tasks should execute
and gain access to the resources they require and
which ones should be adapted. A TaskPriorityAssign-
ment represents the TaskPriority (high, medium, or
low) that is assigned to a Task. The assigned priority
differs by TimeFrames, which represent time inter-
vals that are meaningful for a certain enterprise and
domain. For example, in an automated warehouse
system, order preparation has a higher priority during
the daytime, when most of the orders are shipped.
A TaskVariant is a special case of a Task and is
needed to (1) avoid treating all Task executions
equally when adapting and (2) to identify how to ex-
ecute a Task with fewer resources. TaskVariants dif-
fer in terms of Parameter values (refer to Section
3.2.2), the Role of the initiating User, TaskPriority,
and resource consumption, as explained next.
As shown in Figure 2, a TaskVariant is associated
with ParameterConditions that are needed to identify
the Parameter values that differentiate the variants. A
ParameterCondition works on a single value, a set of
values, or range of values (e.g., “PackMode = Ran-
dom”, “ItemType in (Books, Media)”, and “Amount
between 1 and 100”). A TaskVariant is also associ-
ated with Roles to indicate its target Users. A
TaskVariant is more important when it is executed by
a User with a privileged Role (e.g., manager). As pre-
viously explained, a Task is assigned a priority. When
Tasks have TaskVariants, the priorities are assigned
to the variants. ResourceIntensiveness values are as-
signed for the ResourceTypes that a TaskVariant uses.
ResourceIntensiveness is required to compare
TaskVariants in terms of resource consumption to
adapt by executing the less resource-intensive vari-
ants when needed. Examples of TaskVaraints are
shown in Figure 3 and explained as follows.
Example. The Task “Get Recommended Items”
has three TaskVariants (Figure 3(a)). Instead of deac-
tivating this Task for all cases or random Users, as is
done by brownout approaches for components (Xu &
Buyya, 2019), its importance is more accurately rep-
resented using prioritised TaskVariants. The first var-
iant of “Get Recommended Items” has a high priority
for any Parameter values when the Role of the User
who is initiating the Task is either VIP-customer or
administrator. The second variant has a high priority
for any Role if the value of the “item type” parameter
is either books or media, as specified by the Parame-
terCondition. The third (default) variant, which rep-
resents all other cases, has a low priority.
Example. The Task “Pack Items in a Box” has
two variants (Figure 3(b)). The variant “Pack Ran-
domly” instructs robots to pack items in a box in a
random order to improve packing speed. The variant
“Pack by Item Type” instructs robots to stack items
by type (e.g., shirts together). The method of packing
items by type provides a better aesthetic outcome but
consumes more of a robot’s time. Hence, the Re-
sourceIntensiveness for the robot is higher for “Pack
by Item Type” (RI2) than for “Pack Randomly” (RI1).
The variants of “Pack Items in a Box” are differenti-
ated by the value of the “pack mode” Parameter that
is either “Random” or “ByItemType”, as the Param-
eterConditions specify. In this example, the Priorities
of the variants are the same for any Role but differ for
TimeFrames and customer type. For example, “Pack
by Item Type” has a high priority for VIP customers
and when a Task is executed between 8:00 and 16:00.
TaskVariants are either Substitutable or Nonsub-
stitutable as shown by TaskType in Figure 2. Both
types enable the system to identify different modes of
executing a Task to avoid treating Task executions
equally. A Substitutable TaskVariant can be executed
instead of another to reduce resource consumption.
Example. Figure 3 shows examples of both Sub-
stitutable and Nonsubstitutable TaskVariants. The
variants of “Get Recommended Items” are Nonsub-
stitutable. Hence, for example, if the search was is-
sued for items of the type shoes it is not possible to
execute the variant related to books and media. On the
other hand, the variants of “Pack Items in a Box” are
Substitutable because it is possible to pack items ran-
domly instead of by type to avoid straining the robots.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
34
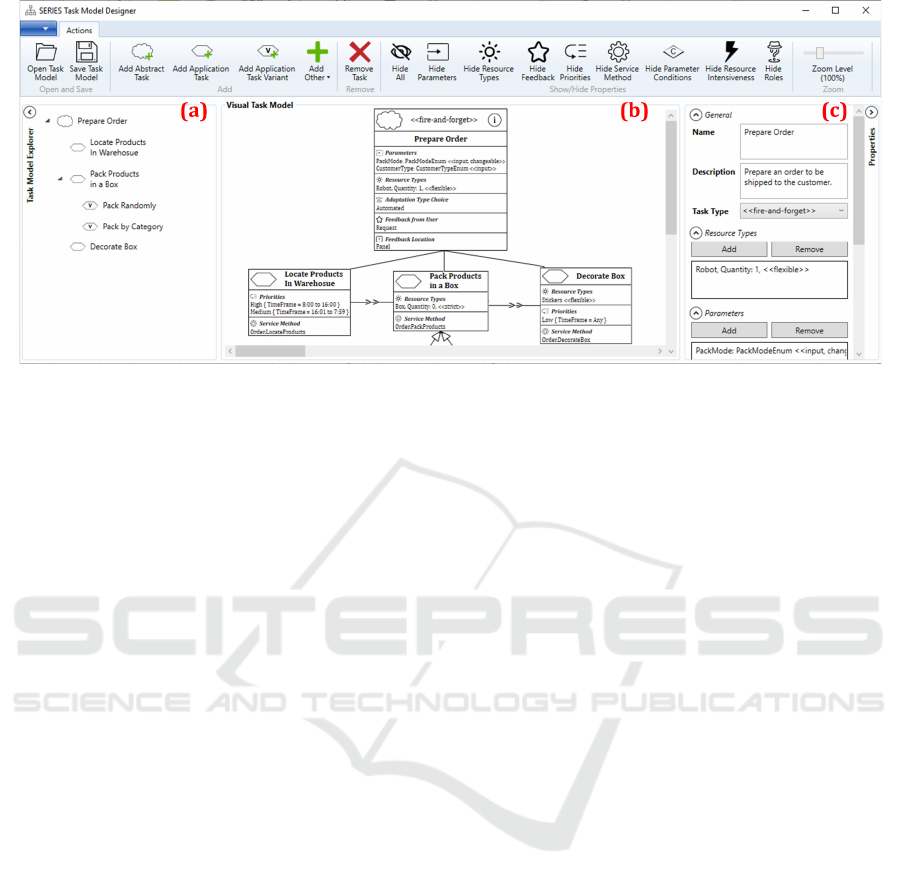
Figure 4: Tool for creating tasks models using SERIES.
It is possible to execute a task variant that is less
resource-intensive. For example, in the case in which
robots are malfunctioning due to hardware failures, or
when there are excess workloads (e.g., robots are ex-
pected to pack orders and to sort returned items, but
there is a high number of returned items). In such
cases, the execution of a less resource-intensive task
variant for low-priority tasks reduces the strain on the
robots and dedicates more capacity to the execution
of high-priority tasks.
ParameterTypes are needed to decide if it is pos-
sible to change a Parameter’s value when a Substitut-
able TaskVariant is changed to another one. Parame-
terTypes include Input and InputChangeable. Input
Parameters are read-only. The system can change the
values of InputChangeable Parameters.
Example. The Input Parameter “SearchText”
from “Get Item Details” is read-only (Figure 3(a)).
The value of the InputChangeable Parameter “Pack
Mode” is changed from “ByItemType” to “Random”
when the TaskVariant “Pack by Item Type” is
changed to “Pack Randomly” (Figure 3(b)).
3.2.4 Feedback from and to End-users
A system could keep end-users informed by giving
them feedback about the reasons for self-adapting. It
could also improve adaptation decisions based on
feedback given by end-users to indicate whether an
adaptation hindered their ability to perform a Task. As
shown in Figure 2, a Task has three feedback proper-
ties: AdaptationTypeChoice, FeedbackFromUser,
and FeedbackLocation. These properties are used to
configure how the system manages end-user feedback.
The property “AdaptationTypeChoice” indicates
whether the adaptation type is selected automatically
by the system or manually by the end-user (refer to
Section 1 for examples of adaptation types). The au-
tomated selection of adaptation types relieves end-us-
ers from having to frequently make manual choices.
Adaptation types can be automatically selected based
on costs (Akiki et al., 2021). However, if multiple ad-
aptation types share the lowest cost and the “Adapta-
tionTypeChoice” property was set to “User” then the
system prompts users to select one of the least costly
adaptation types. Otherwise, the system automati-
cally selects one of the least costly adaptation types.
If the property “FeedbackFromUser” was set to
“Request”, then the system would request feedback
from end-users on how the adaptations affected their
work and use this feedback to adjust the costs of the
adaptation types. If a Task only has one applicable ad-
aptation type, then this property will be automatically
set to “Disable”. An example is a Task that cannot be
delayed because its ExecutionType is “followed-by-
interaction”, its required ResourceTypes are strict and
hence non-substitutable, it has no substitutable vari-
ants, and the only choice for the system is to block it.
The “FeedbackLocation” property indicates if the
system should display feedback messages to the end-
users on a task’s corresponding UI or in a separate
panel. The first option is suitable when end-users
need immediate feedback as they work, while the sec-
ond option groups feedback so it can be checked later.
Example. If the Task “Get Recommended Items”
(Figure 3(a)) was blocked from executing, the system
could display a message on the UI where the recom-
mendations were supposed to appear. The mapping
between task models and UI widgets has been ad-
dressed by existing work (Calvary et al., 2003). If the
Task “Pack by Item Type” (Figure 3(a)) was changed
to its variant “Pack Randomly” a feedback message
SERIES: A Task Modelling Notation for Resource-driven Adaptation
35

could be displayed in a separate UI panel for the end-
users to check after a batch of orders is prepared. End-
users give feedback to the system via a rating widget
that is shown next to the feedback messages.
3.2.5 Task Categories, Resource Type
Categories, and Default Values
TaskCategories and ResourceTypeCategories group
Tasks and ResourceTypes respectively (Figure 2).
This categorisation is needed to speed up the work of
system administrators by assigning Priorities and Re-
sourceTypeCategories to TaskCategories when Tasks
that belong to the same TaskCategory have common
Priorities and ResourceTypes. As shown in Figure 2,
the classes TaskResourceAssignment and TaskPrior-
ityAssignment are associated with ResourceType and
ResourceTypeCategory and Task and TaskCategory
respectively. Therefore, assignments that are done at
the level of a category apply to all its corresponding
ResourceTypes or Tasks. For example, assume that
several tasks depend on RAM and CPU. System ad-
ministrators could place these Tasks under a TaskCat-
egory that is associated with a computer hardware
(RAM and CPU) ResourceTypeCategory.
The property values that are set on a parent task
also apply to its child tasks, unless specified other-
wise (overridden).
Example. The Parameters, ResourceTypes, and
feedback properties that are specified for the Tasks
“Get Item Details” (Figure 3(a)) and “Prepare Order”
(Figure 3(b)), apply to their subtasks. Similarly, the
ServiceMethod specified for the Task “Pack Items in
a Box” (Figure 3(b)) applies to its variants “Pack Ran-
domly” and “Pack by Item Type”.
4 TOOL SUPPORT
SERIES is supported by a visual tool, shown in Fig-
ure 4, which enables software practitioners and sys-
tem administrators to create and modify task models.
This tool was developed using C#, and it stores task
models as data in a SQL Server database (Figure 1).
The tool is composed of three main panels,
namely: (a) Task Model Explorer, (b) Visual Task
Model, and (c) Properties. The Task Model Explorer
offers a compact hierarchical view of the tasks (Fig-
ure 4(a)). The Visual Task Model panel displays task
models, using the visual notation of SERIES, and
supports dragging, dropping, and selecting elements
(Figure 4(b)). The Properties panel, shown in Figure
4(c), allows for specifying the characteristics of tasks.
Software practitioners can use the tool at design
time to define the tasks and their relationships based
on their systems’ specifications. System administra-
tors can modify the task models at runtime based on
the needs of their enterprises. User roles and parame-
ter values differ among enterprises and are, therefore,
added at runtime. For example, roles like “VIP-Cus-
tomer” from “Variant1”, shown in Figure 3(a), are
created by system administrators at runtime via their
ESs. Hence, the association of roles with tasks is also
done at runtime. Consider that “Get Recommended
Items” (Figure 3(a)), could be blocked to reduce CPU
consumption. Some enterprises could decide to keep
the recommended items for certain item types like
books and media as indicated on “Variant2” in Figure
3(a). However, these choices differ among enterprises
and are therefore specified at runtime.
5 EVALUATION
We assessed the usability of SERIES and evaluated
its performance overhead and source-code intrusive-
ness as explained in the following subsections.
5.1 Usability
SERIES extends CTT and the visual representation of
its extended elements is also inspired by UML class
diagrams. SERIES uses the shape-based icons of CTT
to represent the interaction and application task types.
However, it is also possible to use the alternative
graphical icons (Paterno et al., 1997). We assessed
SERIES based on the recommendations of the cogni-
tive-dimensions framework (Green & Petre, 1996). In
the following text, the names of the dimensions are
shown in bold.
SERIES represents tasks consistently using boxes
with multiple parts, which are based on UML classes.
These box parts represent properties that support re-
source-driven adaptation (Figure 3(c)).
SERIES is abstraction-tolerant since it supports
the representation of task models using predefined
visual elements of tasks, properties, and relationships.
It is not possible to add new visual elements.
However, new abstractions are defined in the form of
parent tasks that comprise default property values,
which do not need to be specified for the child tasks.
A premature commitment is not needed since a
SERIES task model may comprise part of the tasks
and property values at design time. Task variants and
properties, like roles and priorities, are set at runtime
when their corresponding data is available (refer to
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
36
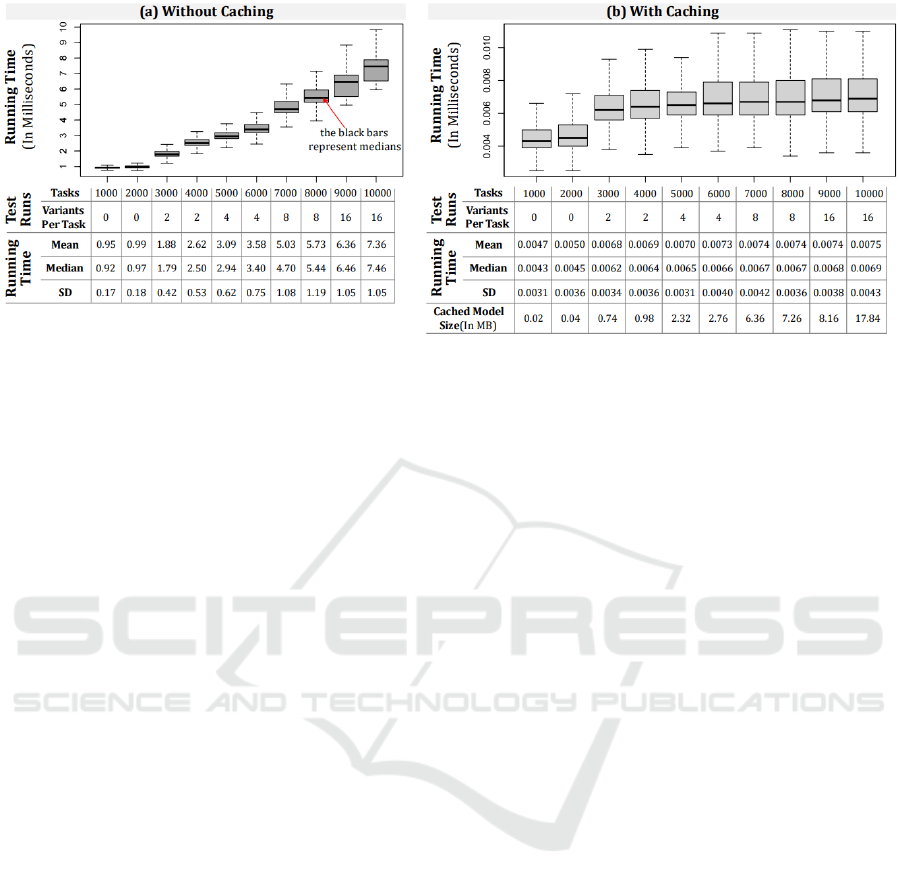
Figure 5: Performance evaluation for the identification of tasks and variants from SERIES task models.
Section 4). Furthermore, a SERIES task model is
arranged hierarchically to avoid “visual spaghetti”
that could occur with some box-and-line notations.
Even in the case in which new tasks are introduced at
a later stage, the model is automatically rearranged
without needing to look ahead to avoid a messy layout.
Concerning diffuseness, each meaning of a task
or property in SERIES is denoted by one box part that
has an icon and a description that makes it easy to re-
member. The ability to add default property values at
the parent task level reduces the number of properties
in the boxes. This improves the overall visibility of
the task model and makes the visual notation terse
(compact) enough to represent multiple tasks on the
screen. Furthermore, it is possible to suppress a group
of task properties by hiding its box parts as is done
with UML class diagrams. Hence, the notation sup-
ports different levels of terseness that are changeable
according to how much detail a person wants to see.
SERIES does not have complex conditionals that
create hard mental operations. Parameter condi-
tions are defined as simple textual statements such as
“PackMode = Random”. Hence, these conditions do
not use complex line connections that cause software
practitioners and system administrators to resort to
tracking what is happening with their fingers.
There are no hidden dependencies between the
elements of a SERIES task model. The dependencies
between tasks are shown as relationships. For exam-
ple, task variants are linked to their base task using
relationships that resemble UML generalisation to in-
dicate that the variants are special cases of a general
case. Furthermore, properties like parameter condi-
tions and priorities are shown on the model without
hidden formulas (e.g., like the ones in spreadsheets).
Concerning role-expressiveness, a task’s name
indicates its purpose. A description can also be added
to a task to further explain its purpose. This descrip-
tion is a secondary notation and is viewed by click-
ing on an information icon, which appears on tasks
that have a description as shown on the “Get Recom-
mended Items” task in Figure 3(a).
SERIES has a low viscosity since little effort is
needed to change tasks and properties using the task
model explorer and properties box (refer to Section 4).
5.2 Performance and Intrusiveness
We used SERIES to develop working resource-driven
adaptation examples that build on an adaptation ap-
proach we proposed in previous work (Akiki et al.,
2021). We measured the performance overhead and
source-code intrusiveness of SERIES task models.
For evaluating the performance, we used
NBomber (NBomber, 2021) to simulate user requests
to C# web service methods representing tasks in an
ES. We measured the time it took to identify the tasks
and variants from a SERIES task model correspond-
ing to the service methods being called.
The identification of tasks and variants is a step in
the adaptation process concerning how and when an
adaptation should occur. This step involves compar-
ing the source-code name of the service method being
called to the service methods from the task model, dy-
namically evaluating whether the parameter condi-
tions from the task model match the parameter values
passed to the service method and comparing the
role(s) of the end-user to the roles in the task model.
Figure 5 shows the results of this evaluation, in-
cluding multiple test runs with an increasing number
of tasks and variants ranging from 1000 to 10,000
tasks and 0 to 16 variants per task. The evaluation was
done with two implementations, one that caches the
task models in memory and another one that does not
SERIES: A Task Modelling Notation for Resource-driven Adaptation
37

perform caching. NBomber simulated user requests
for 10 minutes per test run. The mean running time
was measured in milliseconds and ranged between
0.95 and 7.36 without caching and 0.0047 and 0.0075
with caching. Both results show a small overhead that
does not hinder a system’s performance. For example,
web users find it tolerable to wait for 2 to 4 seconds
(Nah, 2004). Both fitting curves of the mean running
times are polynomial with R
2
= 0.9924 (without cach-
ing) and 0.9797 (with caching). We favour using
caching since it improves performance without bur-
dening the memory (cached model size ranged from
0.02 MB to 17.84 MB—Figure 5(b)). This evaluation
was done on a Windows 10 computer with a Core i7
1.8 GHz CPU and 16 GB of RAM.
Intrusiveness is evaluated in terms of the LOC and
source-code files that are added or modified to inte-
grate resource-driven adaptation into an ES. If minor
changes are needed, then the integration is non-intru-
sive. It is more desirable to perform the integration
with minor changes because this means that less ef-
fort is needed and there is less chance of introducing
errors into the source code of the ES.
We used .NET actions filters (Larkin et al., 2021)
to intercept the service method calls and execute the
code that we implemented to identify tasks and vari-
ants. Our implementation included one action filter
with either 112 LOC (without caching) or 136 LOC
(with caching), which are global for the entire system.
We can say that the integration is non-intrusive be-
cause we only needed to add 136 LOC in two source-
code files to make our approach work for any number
of tasks. We did not modify task-specific source code
(e.g., business logic). This makes it easier to integrate
resource-driven adaptation capabilities into ESs that
comprise thousands of tasks. If we had to add or mod-
ify LOC in several source-code files per task, then the
integration would become more intrusive as the num-
ber of tasks increases, due to the widespread changes.
6 CONCLUSION AND FUTURE
WORK
This paper presented a task modelling notation called
SERIES, which offers task types and properties re-
quired for the development of ESs that support re-
source-driven adaptation. SERIES is complemented
by a tool that enables software practitioners to define
task models at design time, and system administrators
to extend these models at runtime, based on enter-
prises’ needs.
We assessed the usability of SERIES following
the cognitive dimensions framework (Green & Petre,
1996). We also evaluated SERIES by using it to de-
velop working examples that build on an existing re-
source-driven adaptation approach and measure its
performance overhead and source-code intrusiveness.
The results showed that SERIES does not hinder per-
formance and is non-intrusive. Although we evalu-
ated SERIES with an adaptation approach, this nota-
tion is also useful for other approaches.
In the future, we aim to extend the tool by sup-
porting the generation of code that corresponds to the
tasks’ service methods. We also aim to implement a
technique that reads the feedback properties from SE-
RIES task models to present and elicit adaptation-re-
lated feedback to and from end-users. It could be pos-
sible to extend SERIES with additional properties af-
ter investigating end-user feedback preferences.
Other areas for future work include usability study of
SERIES with software practitioners and the use of the
Physics of Notations (Moody, 2009) as part of our
evaluation. We also plan to extend the evaluation to
include case studies across multiple domains.
ACKNOWLEDGEMENTS
This work was supported by the Engineering and
Physical Sciences Research Council [grant numbers
EP/V026747/1, EP/R013144/1].
REFERENCES
Akiki, P. A., Zisman, A., & Bennaceur, A. (2021). Work
With What You’ve Got: An Approach for Resource-
Driven Adaptation. 2021 IEEE International Confer-
ence on Autonomic Computing and Self-Organizing
Systems Companion (ACSOS-C), 105–110.
Annett, J. (2003). Hierarchical task analysis. Handbook of
Cognitive Task Design, 2, 17–35.
Calvary, G., Coutaz, J., Thevenin, D., Limbourg, Q., Bouil-
lon, L., & Vanderdonckt, J. (2003). A unifying refer-
ence framework for multi-target user interfaces. Inter-
acting with Computers, 15(3), 289–308.
Cheng, B. H. C., de Lemos, R., Giese, H., Inverardi, P.,
Magee, J., Andersson, J., Becker, B., Bencomo, N.,
Brun, Y., Cukic, B., Di Marzo Serugendo, G., Dustdar,
S., Finkelstein, A., Gacek, C., Geihs, K., Grassi, V.,
Karsai, G., Kienle, H. M., Kramer, J., … Whittle, J.
(2009). Software Engineering for Self-Adaptive Sys-
tems: A Research Roadmap. In B. H. C. Cheng, R. de
Lemos, H. Giese, P. Inverardi, & J. Magee (Eds.), Soft-
ware Engineering for Self-Adaptive Systems (Vol.
5525, pp. 1–26). Springer Berlin Heidelberg.
https://doi.org/10.1007/978-3-642-02161-9_1
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
38

Christi, A., Groce, A., & Gopinath, R. (2017). Resource ad-
aptation via test-based software minimization. 2017
IEEE 11th International Conference on Self-Adaptive
and Self-Organizing Systems (SASO), 61–70.
https://doi.org/10.1109/SASO.2017.15
De Lemos, R., Giese, H., Müller, H. A., Shaw, M., Anders-
son, J., Litoiu, M., Schmerl, B., Tamura, G., Villegas,
N. M., Vogel, T., & others. (2013). Software engineer-
ing for self-adaptive systems: A second research
roadmap. In Software Engineering for Self-Adaptive
Systems II (pp. 1–32). Springer.
Giese, M., Mistrzyk, T., Pfau, A., Szwillus, G., & Von
Detten, M. (2008). AMBOSS: a task modeling ap-
proach for safety-critical systems. In Engineering Inter-
active Systems (pp. 98–109). Springer.
Gotz, S., Gerostathopoulos, I., Krikava, F., Shahzada, A., &
Spalazzese, R. (2015). Adaptive Exchange of Distrib-
uted Partial Models@run.time for Highly Dynamic
Systems. 2015 IEEE/ACM 10th International Sympo-
sium on Software Engineering for Adaptive and Self-
Managing Systems, 64–70. https://doi.org/10.1109/
SEAMS.2015.25
Green, T. R. G., & Petre, M. (1996). Usability analysis of
visual programming environments: A ‘cognitive di-
mensions’ framework. Journal of Visual Languages &
Computing, 7(2), 131–174.
Guerrero-García, J., González-Calleros, J., & Vander-
donckt, J. (2012). A Comparative Analysis of Task
Modeling Notations. Acta Universitaria, 22, 90–97.
Hallsteinsen, S., Hinchey, M., Park, S., & Schmid, K.
(2008). Dynamic software product lines. Computer,
41(4), 93–95.
Hartson, H. R., & Gray, P. D. (1992). Temporal aspects of
tasks in the user action notation. Human-Computer In-
teraction, 7(1), 1–45.
Johnson, H., & Hyde, J. (2003). Towards modeling individ-
ual and collaborative construction of jigsaws using task
knowledge structures (TKS). ACM Transactions on
Computer-Human Interaction (TOCHI), 10(4), 339–387.
Keeney, J., & Cahill, V. (2003). Chisel: A policy-driven, con-
text-aware, dynamic adaptation framework. Proceedings
POLICY 2003. IEEE 4th International Workshop on Pol-
icies for Distributed Systems and Networks, 3–14.
Kieras, D. (2004). GOMS Models for Task Analysis. The
Handbook of Task Analysis for Human-Computer In-
teraction, Ed. Dan Diaper, Neville A. Stanton. Law-
rence Erlbaum Associates.
Larkin, K., Anderson, R., Dykstra, T., & Smith, S. (2021).
Filters in ASP.NET Core. https://docs.microsoft.com/
en-us/aspnet/core/mvc/controllers/filters?view=aspnet
core-5.0
Limbourg, Q., & Vanderdonckt, J. (2004). Comparing task
models for user interface design. The Handbook of Task
Analysis for Human-Computer Interaction, 6, 135–154.
Limbourg, Q., Vanderdonckt, J., Michotte, B., Bouillon, L.,
& Lopez-Jaquero, V. (2004). USIXML: A language
supporting multi-path development of user interfaces.
IFIP International Conference on Engineering for Hu-
man-Computer Interaction, 200–220.
Lucas, W. T., Xu, J., & Babaian, T. (2013). Visualizing
ERP Usage Logs in Real Time. ICEIS (3)
, 83–90.
Martinie, C., Palanque, P., Bouzekri, E., Cockburn, A.,
Canny, A., & Barboni, E. (2019). Analysing and
demonstrating tool-supported customizable task nota-
tions. Proceedings of the ACM on Human-Computer
Interaction, 3(EICS), 1–26.
Martinie, C., Palanque, P., & Winckler, M. (2011). Struc-
turing and composition mechanisms to address scalabil-
ity issues in task models. IFIP Conference on Human-
Computer Interaction, 589–609.
Molina, A. I., Redondo, M. A., Ortega, M., & Lacave, C.
(2014). Evaluating a graphical notation for modeling
collaborative learning activities: A family of experi-
ments. Science of Computer Programming, 88, 54–81.
Moody, D. (2009). The “physics” of notations: Toward a
scientific basis for constructing visual notations in soft-
ware engineering. IEEE Transactions on Software En-
gineering, 35(6), 756–779.
Nah, F. F.-H. (2004). A study on tolerable waiting time:
How long are web users willing to wait? Behaviour &
Information Technology, 23(3), 153–163.
NBomber. (2021). https://nbomber.com/
Paterno, F., Mancini, C., & Meniconi, S. (1997). Concur-
TaskTrees: A diagrammatic notation for specifying task
models. Human-Computer Interaction INTERACT’97,
362–369.
Perttunen, M., Jurmu, M., & Riekki, J. (2007). A QoS
model for task-based service composition. Proc. 4th In-
ternational Workshop on Managing Ubiquitous Com-
munications and Services, 11.
Rigole, P., Clerckx, T., Berbers, Y., & Coninx, K. (2007).
Task-driven automated component deployment for am-
bient intelligence environments. Pervasive and Mobile
Computing, 3(3), 276–299.
Sousa, J. P., Poladian, V., Garlan, D., Schmerl, B., & Shaw,
M. (2006). Task-based adaptation for ubiquitous com-
puting. IEEE Transactions on Systems, Man, and Cy-
bernetics, Part C (Applications and Reviews), 36(3),
328–340. https://doi.org/10.1109/TSMCC.2006.871588
Tarby, J.-C., & Barthet, M.-F. (1996). The DIANE+
Method. CADUI, 96, 95–119.
Van Der Veer, G. C., Lenting, B. F., & Bergevoet, B. A.
(1996). GTA: Groupware task analysis—Modeling
complexity. Acta Psychologica, 91(3), 297–322.
Vidani, A. C., & Chittaro, L. (2009). Using a task modeling
formalism in the design of serious games for emergency
medical procedures. 2009 Conference in Games and
Virtual Worlds for Serious Applications, 95–102.
Vigo, M., Santoro, C., & Paternò, F. (2017). The usability
of task modeling tools. 2017 IEEE Symposium on Vis-
ual Languages and Human-Centric Computing
(VL/HCC), 95–99.
von Rosing, M., White, S., Cummins, F., & de Man, H.
(2015). Business Process Model and Notation-BPMN.
Xu, M., & Buyya, R. (2019). Brownout approach for adap-
tive management of resources and applications in cloud
computing systems: A taxonomy and future directions.
ACM Computing Surveys (CSUR), 52(1), 1–27.
SERIES: A Task Modelling Notation for Resource-driven Adaptation
39
