
Ad-datasets: A Meta-collection of Data Sets for Autonomous Driving
Daniel Bogdoll
1,2,
*
, Felix Schreyer
2,∗
and J. Marius Z
¨
ollner
1,2
1
FZI Research Center for Information Technology, Germany
2
Karlsruhe Institute of Technology, Germany
Keywords:
Autonomous Driving, Data Set, Overview, Collection.
Abstract:
Autonomous driving is among the largest domains in which deep learning has been fundamental for progress
within the last years. The rise of datasets went hand in hand with this development. All the more striking is the
fact that researchers do not have a tool available that provides a quick, comprehensive and up-to-date overview
of data sets and their features in the domain of autonomous driving. In this paper, we present ad-datasets, an
online tool that provides such an overview for more than 150 data sets. The tool enables users to sort and
filter the data sets according to currently 16 different categories. ad-datasets is an open-source project with
community contributions. It is in constant development, ensuring that the content stays up-to-date.
1 INTRODUCTION
One of the core building blocks on the way to fully
autonomous vehicles are data sets. Of particular inter-
est are those that contain data on all aspects of traffic.
Their area of application in the research area related to
autonomous driving is diverse. Hence, their number
has multiplied significantly over the years. They have
proven to be a necessary tool on the way to achieving
the goal of autonomous vehicles.
Given this increase in importance, it seems all the
more surprising that researchers still do not have a
tool at hand, that provides them an overview of ex-
isting data sets and their characteristics. Even today,
the search for fitting data sets is a tedious and cum-
bersome task. Existing overviews are typically either
incomplete and miss relevant data sets or come in the
form of scientific papers, therefore slowly but steadily
becoming outdated. This is an especially undesirable
condition in such a rapidly evolving field.
Researchers are therefore regularly reliant on find-
ing suitable data sets on their own. However, this
task is not only extremely time-consuming, as it in-
volves studying numerous websites and papers. It
also in no way guarantees that researchers will indeed
find a suitable, perhaps even optimal, data set. This
led to the situation that many researchers rely on the
same, old datasets, while newer, larger options might
be available.
∗
These authors contributed equally
In this publication, we present our attempt to ad-
dress this unanswered challenge. With ad-datasets
1
we have developed a tool that provides users with a
comprehensive, up-to-date overview of existing data
sets in the field of autonomous driving, as shown in
Figure 1. In addition, the properties of the data sets
are broken down into different categories. Users are
given the opportunity to individually filter and sort the
data sets according to certain criteria or rather, to their
individual needs. Currently
2
, ad-datasets comprises
158 data sets.
Furthermore, ad-datasets is an open-source
project. The community is encouraged to contribute,
such as missing data sets or metadata. We are proud
to have already received several community contri-
butions only a few weeks after the initial release, in-
cluding ones from ARGO AI, a well-known company
within the domain. ad-datasets, hosted via Github
Pages, enables this particularly easily via pull re-
quests and automated deployments.
The further structure of this paper is organized as
follows: In section 2, relevant related work is pre-
sented. Section 3 introduces the tool ad-datasets and
its technical implementation. Section 4 analyzes the
information obtained. The final section 5 provides an
outlook into future extensions.
1
https://ad-datasets.com/
2
as of Nov 25, 2021
46
Bogdoll, D., Schreyer, F. and Zöllner, J.
Ad-datasets: A Meta-collection of Data Sets for Autonomous Driving.
DOI: 10.5220/0011001900003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 46-56
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
The research area around autonomous driving shines
with great progress and a high rate of development.
Numerous advances are made every year and the
amount of literature continues to grow. This is also
the case in the area of data collection, respectively
the area of data sets in autonomous driving. Over the
years, however, the sheer amount of data sets has be-
come increasingly complicated. For this reason, there
have been attempts in the past to provide a structure
to these advances. In general, these attempts can be
divided into two separate categories.
2.1 Scientific Papers
First, there are studies that aim to create a general,
comprehensive overview of existing data sets from
the area of research. These include (Yin and Berger,
2017), where 27 data sets prevalent at the time were
presented. Around three times that amount was sum-
marized in (Laflamme et al., 2019).
In addition to these studies, which aim directly
at creating an overview of data sets, there are also
studies that focus primarily on different research
questions, but also contain such an overview. (Feng
et al., 2020) presented their work, which also comes
in an online version briefly mentioned in the fol-
lowing subsection, that investigated the research
question of Deep Multi-modal Object Detection and
Semantic Segmentation for Autonomous Driving.
Yet, the authors also examined multi-modal data
sets, with the multimodality referring to the sensors
used. Compared to the works of Yin and Berger and
Laflamme et al. however, this collection is much
smaller in scope. (Heidecker et al., 2021) takes
on the topic of corner cases in highly automated
driving. Here, too, a section revolves solely around
suitable data sets for corner case detectors. Finally,
in the same year (Kim and Hwang, 2021) was
published that contains a survey addressing data sets
for monocular 3D detection. Yet, these papers also
lag behind in scope. It is important to note, that
publications which do not focus on data sets but
provide overviews of them as side effect typically
focus strongly on their area of research. Thus, they
rarely provide a broad picture of data sets and tend to
focus either on popular and well known data sets or
their specific niche.
What all these publications share is that they ap-
peared in the format of scientific works. Thus, they
have some weaknesses in common when it comes
to searching for data sets. To start with, they share
the problem that they become out-of-date relatively
quickly. This is an undesirable characteristic, espe-
cially in a research area that is developing as quickly
as the one of autonomous driving. In addition, these
overviews lack a convenient format. Naturally, the
publications offer neither a filtering nor a sorting
function, therefore not being as effortless and time
saving as one would desire.
2.2 Online Sources
Further, there exist various sources in online formats.
These can in turn be broken down into read-only tex-
tual sources, mostly in the form of blogs (Choudhury,
2020)(Cambridge Spark, 2018)(Nguyen’s, 2021),
wiki entries (Wikipedia, 2021)(FOT-Net, 2020), git
repositories (Heyuan, 2019)(Diaz, 2021) or mis-
cellaneous entries (DIY Robocars, 2017)(Krunal,
2018)(Feng et al., 2021), and into interactive tools.
The textual sources are usually kept very compact
and often contain fewer than ten data sets, which are
typically among the better known ones. Additionally,
many times the summaries are primarily aimed at ma-
chine learning related data sets in general. It is then
left to the users to filter out the relevant autonomous
driving related data sets. Since all of these sources,
much like scientific papers, do neither allow any fil-
tering nor sorting functions and are typically not kept
up-to-date, they are poorly suited as sources for ex-
tensive data set searches.
A completely different picture emerges when
looking at online tools. Their format is much more
suitable for searches of any kind.
RList (RList, 2021) provides such a tool. Both
sorting and search functions are available to users.
Further, entries are broken down into categories by
release date, organization, frames and location. How-
ever, with only nine data set entries it remains rather
small. Scale (Scale, 2019) provides another, much
more extensive tool. It comprises 50 data sets from
the areas of autonomous driving and natural language
processing. Further, the tool highlights a variety of
categories, namely sensor types, annotations, diver-
sity and recording location. Filter functions are also
available to the user. Unfortunately, however, the tool
does not contain any data set entries after 2019 and
can therefore not be considered as up-to-date. This is
where the Dataset list (Plesa, 2021) tool stands out.
Up to the time of publication of this work, the tool
was regularly updated, and can therefore be regarded
as up-to-date. The tool comes with four categories of
which the highlighting of the licenses differs from the
ones previously described. Yet, with a volume of 25
data sets from the field of autonomous driving, it is
Ad-datasets: A Meta-collection of Data Sets for Autonomous Driving
47

Table 1: Comparison between ad-datasets and other online tools. We compare the number of entries in each tool, the features
the tools provide, the number of properties broken down in detail and when the tools were last updated.
Dataset Overview Entries Filterable Sortable
Community
Contribution
Number of
Itemized
Properties
Last Update
ad-datasets 158 Yes Yes Yes 16 2021
Bifrost 50 Yes Yes No - 2020
Dataset list 25 Yes No Yes 4 2021
Kaggle 31 Yes Yes Yes - 2021
RList 9 Yes Yes No 5 2021
Scale 50 Yes No No 4 2019
YonoStore 10 No Yes No - 2021
too small to be able to claim a complete overview of
existing data sets.
Also Bifrost with 50 data sets (Bifrost, 2020),
Kaggle with 31 data sets (Kaggle, 2021) and Yono-
Store with ten data sets (YonoStore, 2021) cannot be
seen as complete, either. Further, unlike the afore-
mentioned online tools, they do not provide the user
with an overview of data set properties at first glance.
More general offers such as Google Dataset
Search (Google, 2018), DeepAI Datasets (DeepAI,
2017) or Papers with Code Datasets (Facebook AI,
2018) have the issue that no domain-specific overview
is possible. Therefore, although they list numerous
data sets, they are not suitable.
Finally, it should be noted that the majority of the
tools examined here do not allow the user to con-
tribute content. Only Kaggle and Dataset list provide
the community with an opportunity to independently
add missing data sets.
3 SELECTION PROCESS
ad-datasets is an online tool designed as the cen-
tral point of contact for data sets in the field of au-
tonomous driving. It includes a detailed representa-
tion of the data sets according to 16 different property
categories and enables users to interact via filter and
sorting functions. As of writing, ad-datasets com-
prises 158 data sets, 40 of which were examined in
detail according to the 16 categories.
3.1 Content
The search for data sets poses a major challenge. In
this work, large and well-known data sets were easily
found, both via the numerous online sources and the
numerous papers which refer to them. Less known,
older data sets were collected through an extensive
literature research. An approach that has proven to be
well-suited for their finding has been the snowballing
principle. However, newer, lesser-known publica-
tions cannot be found this way. In fact, finding them
has turned out to be the greatest difficulty. Since they
are rarely mentioned in literature or online sources,
their search had to be designed differently. In this
work, these data sets were identified through the
use of search engines and via communities such as
LinkedIn. It should be noted, that this procedure
is associated with a high level of effort, so being
well-connected in the relevant communities is of
great benefit. Needless to say, this practice is not
very scientific, but extremely effective, as new data
sets in the community are often shared through social
media.
In this paper, autonomous driving related data sets
are defined as data sets that contain data on all aspects
of traffic. They can both consist of scenes and scenar-
ios
3
of road traffic or its participants. ad-datasets in-
cludes, for example, data sets with video sequences of
intersections from a bird’s eye view, but also record-
ings from a vehicle directly participating in traffic.
The primary focus of ad-datasets are those data
sets which were published after the famous KITTI
data set, which serves, so to speak, as a time bench-
mark. Regarding the selection of the data sets which
were analyzed in detail, the selection can be separated
into two parts. 31 of the data sets were selected man-
ually by the authors, focusing on the most popular
ones. The remaining nine data sets were selected at
random. The breakdown can be seen in table 2.
3
Following the definitions of (Ulbrich et al., 2015)
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
48
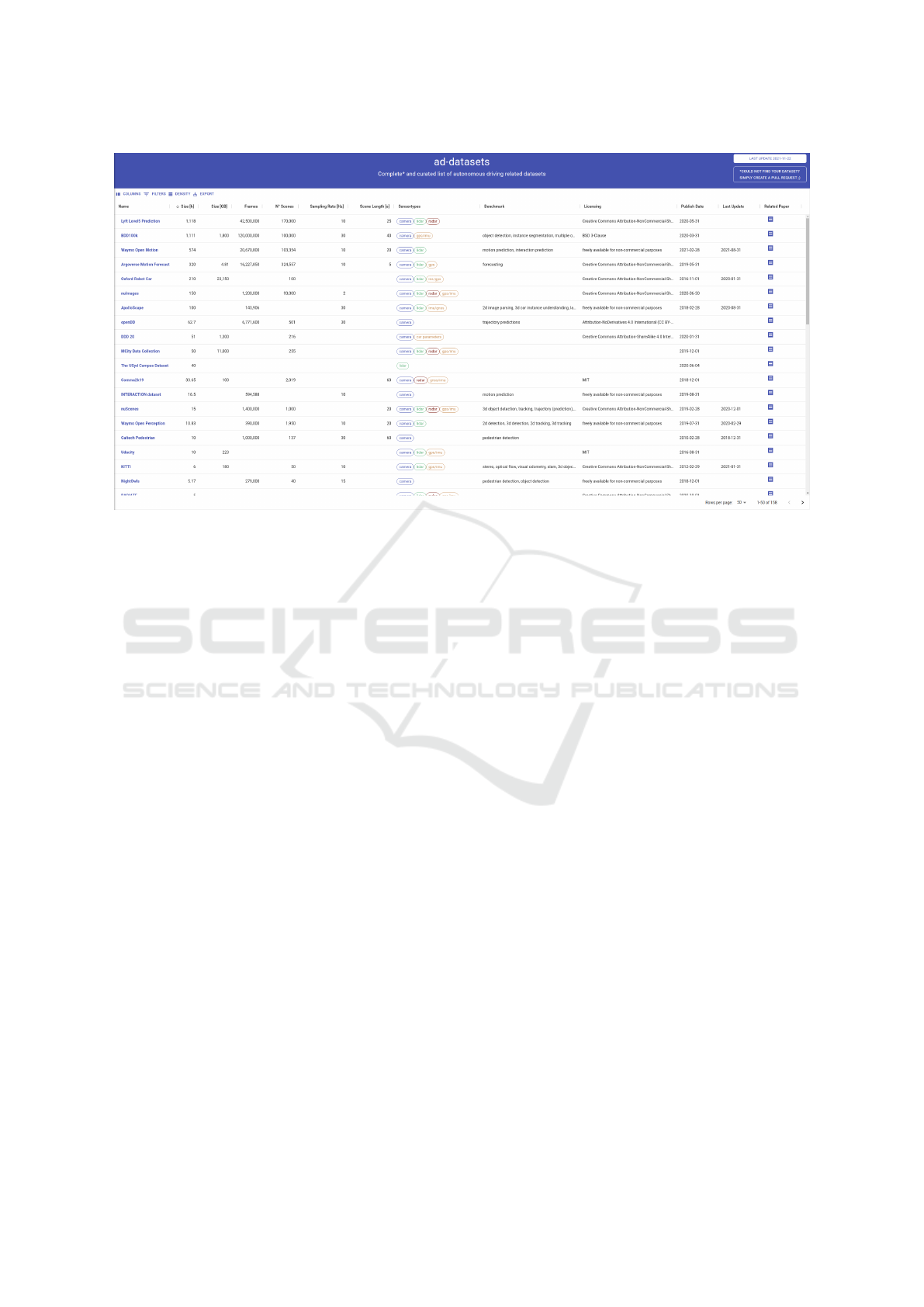
Figure 1: Screenshot of the ad-datasets web application.
3.2 Structure
The selected property categories are in turn the result
of an expert survey conducted of the research group
for technical cognitive systems at the FZI Research
Center for Information Technology. Over 20 differ-
ent categories were suggested in the survey (Table
3). Ultimately, 16 categories found their way into
the initial version due to time constraints. The se-
lection of these properties that were included in the
tool was made based on an examination of ten ex-
emplary data sets. In this examination, the time re-
quired to collect the data for each property was in-
vestigated. The data was collected via the web pres-
ences of the data sets and their corresponding pa-
pers. The decision on whether a category was in-
cluded was made based upon the author’s perceived
importance of the property and the associated time re-
quired to include the category in the selection. The
ten exemplary data sets were Cityscapes 3D, Apol-
loScape, Lyft Level5 Prediction, Oxford Robot Car,
nuScenes, PandaSet, Waymo Open Motion, KITTI,
BDD100k and openDD. The resulting 16 categories
are presented in detail at this point.
3.2.1 Annotations
Annotations. This property describes the types
of annotations with which the data sets have been
provided.
Benchmark. If benchmark challenges are explicitly
listed with the data sets, they are specified here.
Frames. Frames states the number of frames in the
data set. This includes training, test and validation
data.
Last Update. If information has been provided on
updates and their dates, they can be found in this
category.
Licensing. In order to give the users an impression
of the licenses of the data sets, information on them
is already included in the tool.
Location. This category lists the areas where the data
sets have been recorded.
N° Scenes. N° Scenes shows the number of scenes
contained in the data set and includes the training,
testing and validation segments. In the case of video
recordings, one recording corresponds to one scene.
For data sets consisting of photos, a photo is the
equivalent to a scene.
Publish Date. The initial publication date of the data
set can be found under this category. If no explicit
information on the date of publication of the data
set could be found, the submission date of the paper
related to the set was used at this point.
Related Data Sets. If data sets are related, the names
of the related sets can be examined as well. Related
data sets are, for example, those published by the
same authors and building on one another.
Related Paper. This property solely consists of a
link to the paper related to the data set.
Sampling Rate [Hz]. The Sampling Rate [Hz]
property specifies the sampling rate in Hertz at which
the sensors in the data set work. However, this
declaration is only made if all sensors are working at
Ad-datasets: A Meta-collection of Data Sets for Autonomous Driving
49
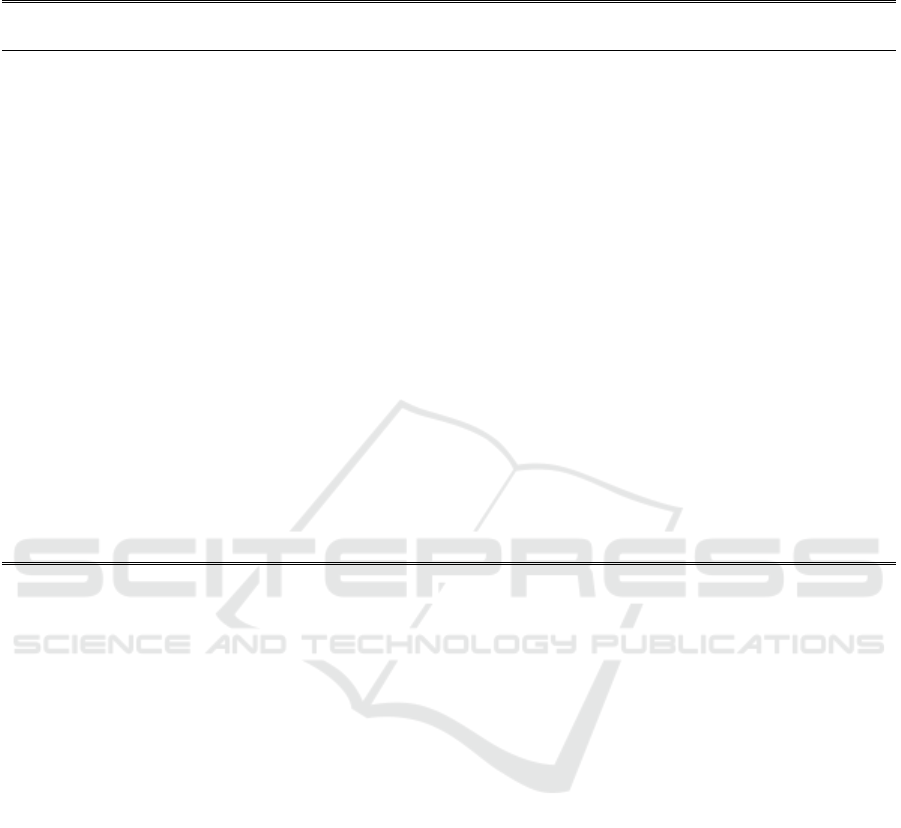
Table 2: Overview of the data sets analyzed in detail. Data sets marked with
j
belong to those which were chosen randomly,
data sets marked with
i
have been selected deterministically by the authors.
Name Size [h] Frames N° Scenes Sensortypes Publish Date Sources
camera lidar radar other
ApolloScape
i
100 143,906 X X X 2018.03 (Wang et al., 2019)(ApolloScape, 2018)
Argoverse Motion Forecasting
i
320 324,557 X X X 2019.06 (Chang et al., 2019)(ARGO AI, 2019)
Argoverse 3D Tracking
i
113 X X X 2019.06 (Chang et al., 2019)(ARGO AI, 2019)
A2D2
i
433,833 3 X X X 2020.04 (Geyer et al., 2020)(A2D2, 2020)
BDD100k
i
1,111 120,000,000 100,000 X X 2020.04 (Yu et al., 2020)(ETH VIS Group, 2018)
Bosch Small Traffic Lights
j
13,427 X 2017.05 (Behrendt and Novak, 2017)(for Image Processing, 2017)
Caltech Pedestrian
i
10 1,000,000 137 X 2010.03 (Doll
´
ar et al., 2009)(California Institute of Technology, 2009)
Cityscapes 3D
i
X X 2016.02 (Cordts et al., 2016)(G
¨
ahlert et al., 2020)(Cityscapes Dataset, 2016)
Comma2k19
i
33.65 2,019 X X X 2018.12 (Schafer et al., 2018)(comma.ai, 2019)
DDD 20
j
51 216 X X 2020.02 (Hu et al., 2020)(Inst. of Neuroinformatics, Univ. of Zurich and ETH Zurich, 2020)
Fishyscapes
i
X 2019.09 (Blum et al., 2019)(ETH Z
¨
urich, 2019)
Ford Autonomous Vehicle
i
X X X 2020.03 (Agarwal et al., 2020)(Ford, 2020)
H3D
j
0.77 27,721 160 X X X 2019.03 (Patil et al., 2019)
India Driving
j
10,004 182 X 2018.11 (Varma et al., 2019)(INSAAN, 2018)
INTERACTION
i
16.5 594,588 X 2019.09 (Zhan et al., 2019)(INTERACTION Dataset Consortium, 2019)
KAIST Multi-Spectral Day/Night
i
X X X 2017.12 (Choi et al., 2018)(KAIST, 2017)
KAIST Urban
i
18 X X X 2017.09 (Jeong et al., 2019)(Autonomy and Lab, 2021)
KITTI
i
6 50 X X X 2012.03 (Geiger et al., 2013)(cvlibs, 2012)
KITTI-360
i
400,000 X X X 2015.11 (Xie et al., 2016)(cvlibs, 2021)
LostAndFound
i
21,040 112 X 2016.09 (Pinggera et al., 2016)(6D-Vision, 2016)
Lyft Level5 Perception
i
2.5 366 X X 2019.07 (Houston et al., 2020)(Level 5, 2020a)
Lyft Level5 Prediction
i
1,118 42,500,000 170,000 X X X 2020.06 (Houston et al., 2020)(Level 5, 2020b)
MCity Data Collection
i
50 255 X X X X 2019.12 (Dong et al., 2019)
NightOwls
j
5.17 279,000 40 X 2018.12 (Neumann et al., 2018)(NightOwls dataset, 2018)
nuImages
i
150 1,200,000 93,000 X X X X 2020.07 (Motional, 2019a)
nuScenes
i
15 1,400,000 1,000 X X X X 2019.03 (Caesar et al., 2019)(Motional, 2019b)
openDD
i
62.7 6,771,600 501 X 2020.09 (Breuer et al., 2020)(L3Pilot, 2019)
Oxford Radar Robot Car
i
32 X X X X 2020.02 (Barnes et al., 2020)(Oxford Robotics Institute, 2020)
Oxford Robot Car
i
210 100 X X X 2016.11 (Maddern et al., 2017)(Oxford Robotics Institute, 2017)
PandaSet
i
0.23 48,000 103 X X X 2020.04 (Hesai, Scale AI, 2020)
RadarScenes
j
4 158 X X X 2021.03 (Schumann et al., 2021)(RadarScenes, 2021)
RADIATE
j
5 X X X X 2020.10 (Sheeny et al., 2020)(Vision Lab, Perception and Robotics Group, 2020)
RoadAnomaly21
i
100 100 X 2021.04 (Chan et al., 2021)(Segment Me If You Can, 2021)
Semantic KITTI
i
43,552 21 X 2019.07 (Behley et al., 2019)(University of Bonn, 2019)
Synscapes
j
25,000 25,000 X 2018.10 (Wrenninge and Unger, 2018)(7D Labs Inc., 2018)
Udacity
i
10 X X X 2016.09 (Udacity, 2020)
Waymo Open Motion
i
574 20,670,800 103,354 X X 2021.03 (Ettinger et al., 2021)(Waymo LLC, 2021)
Waymo Open Perception
i
10.83 390,000 1,950 X X 2019.08 (Sun et al., 2020)(Waymo LLC, 2019)
WildDash
i
156 X 2018.02 (Zendel et al., 2018)(AIT, 2020)
4Seasons
j
30 X X 2020.10 (Wenzel et al., 2020)(Artisense, 2020)
the same rate or, alternatively, if the sensors are being
synchronized. Otherwise, the field remains empty.
Scene Length [s]. This property describes the length
of the scenes in seconds in the data set, provided
all scenes have the same length. Otherwise, no
information is given. For example, if a data set has
scenes with lengths between 30 and 60 seconds, no
entry can be made. The background to this procedure
is to maintain comparability and sortability.
Sensor Types. This category contains a rough
description of the sensor types used. Sensor types
are, for example, lidar or radar.
Sensors - Details. The Sensors - Detail category is an
extension of the Sensor Types category. It includes a
more detailed description of the sensors. The sensors
are described in detail in terms of type and number,
the frame rates they work with, the resolutions which
sensors have and the horizontal field of view.
Size [GB]. The category Size [GB] describes the
storage size of the data set in gigabytes.
Size [h]. The Size [h] property is the equivalent of the
Size [GB] described above, but provides information
on the size of the data set in hours.
It should be noted that, the name of the data set
is naturally listed, too. It further acts as a link to the
respective website of the data set. Further, it is worth
mentioning that the general aim is to state the prop-
erties as precisely as possible. Yet, this also depends
on how accurate the documentation of the data set is.
For example, a size specification of 100+ hours is less
precise than a specification of 103 hours. In the case
of the former, the tool would only state a size of 100
hours.
3.3 Technical Implementation
ad-datasets is hosted on GitHub Pages. This allows
for a seamless integration of the research community.
Not only can the community influence the develop-
ment process, but also actively expand its content.
This is especially valuable as, no matter how exten-
sive a search, it cannot be guaranteed that the tool is
indeed complete. Missing entries or metadata can be
added via pull requests, which automatically trigger
the build system to publish the changes.
The implementation of the tool itself was done
using the frameworks React (Facebook, 2013) and
Material-UI (Material-UI, 2014). The latter enables a
quick and uncomplicated creation of filterable as well
as sortable tables. In this work, the data grid com-
ponent (Material-UI, 2020) of the Material-UI frame-
work was used.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
50

Table 3: Property categories resulting from an expert survey
with indication whether they have been included.
Property Included
Annotations X
Benchmark X
Frames X
Last Update X
Licensing X
Location X
N° Scenes X
Publish Date X
Related Datasets X
Related Paper X
Sampling Rate [Hz] X
Scene Length [s] X
Sensor Types X
Sensors - Details X
Size [GB] X
Size [h] X
Data Format 7
Main Focus 7
Recording Perspective 7
Statistics 7
Tooling 7
4 PROPERTY EXAMINATION
This section takes a closer look at the 40 data sets
from ad-datasets that have been analyzed in detail.
4.1 Data Sets over Time
In Figure 2, the observed data sets are shown on a
timeline. While keeping in mind that the majority of
the data sets were not chosen randomly, a clear ten-
dency can be identified that both the amount of data
sets and the amount of data set publications per year
are steadily increasing.
For a start, this finding emphasizes once again the
dynamics in the research field of autonomous driving.
More to the point, it demonstrates the importance of a
well-maintained and up-to-date tool in order to tackle
the currently prevailing inconvenience that come with
data set searches. The accelerating pace of data set
publications makes it even clearer, that unsupervised
overviews age at an equally increasing pace.
4.2 Use of Sensor Types
When looking at the sensor types used in the various
data sets (Figure 3), it is first noticeable that the sen-
sor type used most frequently is the camera. In fact,
the only data set analyzed that does not utilize camera
sensors is the Semantic KITTI data set. The remain-
ing 39 out of 40 data sets make use of the camera
sensor type.
The Semantic KITTI data set in return deploys li-
dar sensors. 22 other data sets do the same, so that
more than 50% of the data sets include lidar data.
Radar data is used much less frequently. Only eight
data sets make use of the sensors. When additionally
considering publication dates, it shows that radar data
sets were added much later. None of the eight radar
data sets have been published before the end of 2018.
Yet, it seems that the importance of data sets contain-
ing radar data is increasing. Of the ten data sets pub-
lished in 2020, four contained radar data.
The outsiders among the sensor types include ther-
mal cameras and thermometers. Each appear in only
one data set, the thermal camera in Cityscapes 3D and
the thermometer in the Multi-Spectral Day / Night
data set.
4.3 Size
Upon analyzing the size of data sets, one can dis-
tinguish between storage size, the time span and the
number of scenes of the data sets.
The inspection of storage size (Figure 5) reveals
that of the eleven data sets which provide informa-
tion on their size, five data sets are smaller than 1,000
GB with the median being 1,300 GB. At the same
time, however, there coexist significantly larger data
sets. The MCity Data Collection data set is 11,000
GB large. The even larger Oxford Robot Car set is
in fact with 23,150 GB more than 17 times as large
as the median. It can therefore be seen that data
sets are mainly of a similar order of magnitude in
terms of storage size. However, there are also sets
of much larger sizes. When looking at the scope
of time (Table 4), an even more pronounced picture
emerges. The median of the 23 data sets, for which
the corresponding information could be obtained, is
16.5 hours. There are more data sets smaller than ten
hours than there are data sets larger than 100 hours.
But here, too, there are examples of very large data
sets. The Lyft Level5 Prediction data set is 1,118
hours large, the BDD100k data set 1,111 hours. These
two data sets are over 60 times as large as the median.
On closer inspection, however, one can spot a dif-
ference between the storage wise large data sets and
Ad-datasets: A Meta-collection of Data Sets for Autonomous Driving
51
Figure 2: Timeline when data sets have been published.
Figure 3: Frequency of use of sensor types in the data sets.
Figure 4: Histogram depicting the distribution of the data
sets over their scope of time.
the time wise large data set. Some of those data sets
that are rather large in terms of storage space have
been existing for multiple years. For example, the Ox-
ford Robot Car data set was published back in 2016.
Data sets which feature large scopes of time have been
published rather recently. Lyft Level5 Prediction and
BDD100k had not been published until 2020.
These impressions can also be transferred to the
analysis of the number of scenes in data sets (Table
6). Once again, the majority revolves around a sim-
ilar range regarding the number of scenes. However,
again, there are outliers that are significantly larger.
The median over all 30 data sets, for which informa-
tion could be gathered, is 158 scenes. Opposite to
that, the Lyft Level5 Prediction (170,000 scenes) and
the Argoverse Motion Forecasting (324,557 scenes)
are over 1,000 respectively over 2,000 times as large.
What’s more, data sets that come with large num-
ber of scenes have been published relatively recently
as well.
5 CONCLUSION AND OUTLOOK
With ad-datasets, we have presented a tool that
aims to simplify the previously complex and time-
consuming search for suitable data sets related to the
Figure 5: Histogram depicting the distribution of the data
sets over their storage size.
Figure 6: Histogram depicting the distribution of the data
sets over their number of scenes.
research area of autonomous driving. ad-datasets
offers users an overview of over 150 data sets, which
are further broken down into 16 different properties.
Finally, users can interact with the tool using filter
and sorting functions. The timeliness of ad-datasets
is maintained through further maintenance of the tool
and can be supported by the community, e.g., via pull
requests.
However, the full potential of the tool has not yet
been realized. To fully do so, a couple of aspects can
be addressed. First, it is obviously necessary to com-
plete the detailed analysis of the remaining data sets.
This is already an ongoing work in progress.
In addition, it is crucial to obtain feedback from
the research community. After all, they are the target
audience of ad-datasets. Hence, their feedback is es-
sential in developing a truly value-adding tool. Initial
feedback from the community has been very positive
and has already led to contributions.
Finally, it must be borne in mind that some of
the properties suggested in the expert survey did not
find their way into the initial version of ad-datasets.
Therefore, they are subject to future work. It was
proposed to include information on the statistical dis-
tribution of classes, labels etc. For the time being,
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
52

this proposal remains subject to future work, as there
were concerns regarding copyright. Likewise, the
suggested property categories data format and tooling
options remain subject to future work. Important cat-
egories, which for the moment were associated with
too much effort as well, are the recording perspective
and the key aspects addressed by the data sets. In a
later version of the tool, these will be included.
ACKNOWLEDGMENT
This work results partly from the KIGLIS project sup-
ported by the German Federal Ministry of Education
and Research (BMBF), grant number 16KIS1231.
REFERENCES
6D-Vision (2016). LostAndFoundDataset. https://www.6d-
vision.com/current-research/lostandfounddataset.
Accessed 2022-02-03.
7D Labs Inc. (2018). Synscapes. https://7dlabs.com/
synscapes-overview. Accessed 2021-08-12.
A2D2 (2020). Driving dataset. . Accessed 2021-08-22.
Agarwal, S., Vora, A., Pandey, G., Williams, W., Kourous,
H., and McBride, J. (2020). Ford multi-AV seasonal
dataset.
AIT (2020). Wilddash 2 benchmark. https://wilddash.cc/.
Accessed 2021-08-09.
ApolloScape (2018). ApolloScape. http:
//apolloscape.auto/. Accessed 2021-08-04.
ARGO AI (2019). Argoverse. https://www.argoverse.org/.
Accessed 2021-08-22.
Artisense (2020). 4seasons dataset. https://www.4seasons-
dataset.com/. Accessed 2021-08-16.
Autonomy, I. R. and Lab, P. I. (2021). Complex ur-
ban dataset. https://sites.google.com/view/complex-
urban-dataset.
Barnes, D., Gadd, M., Murcutt, P., Newman, P., and Pos-
ner, I. (2020). The oxford radar RobotCar dataset: A
radar extension to the oxford RobotCar dataset. In
Proceedings of the IEEE International Conference on
Robotics and Automation (ICRA).
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Stachniss, C., and Gall, J. (2019). SemanticKITTI:
A dataset for semantic scene understanding of LiDAR
sequences. In Proc. of the IEEE/CVF International
Conf. on Computer Vision (ICCV).
Behrendt, K. and Novak, L. (2017). A deep learning ap-
proach to traffic lights: Detection, tracking, and clas-
sification. In Robotics and Automation (ICRA), 2017
IEEE International Conference on.
Bifrost (2020). Search for visual datasets. https://
datasets.bifrost.ai/. Accessed 2021-08-16.
Blum, H., Sarlin, P., Nieto, J. I., Siegwart, R., and Ca-
dena, C. (2019). The fishyscapes benchmark: Mea-
suring blind spots in semantic segmentation. arXiv
preprint:1904.03215.
Breuer, A., Term
¨
ohlen, J., Homoceanu, S., and Fingscheidt,
T. (2020). opendd: A large-scale roundabout drone
dataset. arXiv preprint:2007.08463.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E.,
Xu, Q., Krishnan, A., Pan, Y., Baldan, G., and Bei-
jbom, O. (2019). nuScenes: A multimodal dataset for
autonomous driving. arXiv preprint:1903.11027.
California Institute of Technology (2009). Cal-
tech Pedestrian Detection Benchmark.
http://www.vision.caltech.edu/Image
Datasets/
CaltechPedestrians/. Accessed 2021-08-22.
Cambridge Spark (2018). 50 free machine learn-
ing datasets: Self-driving cars. https:
//blog.cambridgespark.com/50-free-machine-
learning-datasets-self-driving-cars-d37be5a96b28.
Accessed 2021-08-16.
Chan, R., Lis, K., Uhlemeyer, S., Blum, H., Honari, S.,
Siegwart, R., Salzmann, M., Fua, P., and Rottmann,
M. (2021). SegmentMeIfYouCan: A benchmark for
anomaly segmentation. arXiv preprint:2104.14812.
Chang, M.-F., Lambert, J., Sangkloy, P., Singh, J., Bak,
S., Hartnett, A., Wang, D., Carr, P., Lucey, S., Ra-
manan, D., and Hays, J. (2019). Argoverse: 3d
tracking and forecasting with rich maps. arXiv
preprint:1911.02620.
Choi, Y., Kim, N., Hwang, S., Park, K., Yoon, J. S., An,
K., and Kweon, I. S. (2018). Kaist multi-spectral
day/night data set for autonomous and assisted driv-
ing. IEEE Transactions on Intelligent Transportation
Systems, 19(3).
Choudhury, A. (2020). Top 10 popular datasets
for autonomous driving projects. https:
//analyticsindiamag.com/top-10-popular-datasets-
for-autonomous-driving-projects/. Accessed 2021-
08-18.
Cityscapes Dataset (2016). Cityscapes dataset. https:
//www.cityscapes-dataset.com/. Accessed 2021-08-
20.
comma.ai (2019). commai/comma2k19. https://
github.com/commaai/comma2k19. Accessed 2021-
08-10.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. arXiv preprint:1604.01685.
cvlibs (2012). The kitti vision benchmark suite. http:
//www.cvlibs.net/datasets/kitti/. Accessed 2021-08-
07.
cvlibs (2021). Kitti-360: A large-scale dataset with
3d&2d annotations. http://www.cvlibs.net/datasets/
kitti-360/. Accessed 2021-08-21.
DeepAI (2017). Discover datasets for machine learning and
a.i. https://deepai.org/datasets. Accessed 2021-08-20.
Diaz, M. (2021). manfreddiaz/awesome-autonomous-
vehicles. https://github.com/manfreddiaz/awesome-
autonomous-vehicles.
Ad-datasets: A Meta-collection of Data Sets for Autonomous Driving
53

DIY Robocars (2017). Open datasets. https://
diyrobocars.com/open-datasets/. Accessed 2021-08-
20.
Doll
´
ar, P., Wojek, C., Schiele, B., and Perona, P. (2009).
Pedestrian detection: A benchmark. In IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Dong, Y., Zhong, Y., Yu, W., Zhu, M., Lu, P., Fang,
Y., Hong, J., and Peng, H. (2019). Mcity data
collection for automated vehicles study. arXiv
preprint:1912.06258.
ETH VIS Group (2018). Bdd100k. https:
//www.bdd100k.com/. Accessed 2021-08-07.
ETH Z
¨
urich (2019). The fishyscapes benchmark. https:
//fishyscapes.com/. Accessed 2021-08-21.
Ettinger, S., Cheng, S., Caine, B., Liu, C., Zhao, H., Prad-
han, S., Chai, Y., Sapp, B., Qi, C. R., Zhou, Y.,
Yang, Z., Chouard, A., Sun, P., Ngiam, J., Vasude-
van, V., McCauley, A., Shlens, J., and Anguelov, D.
(2021). Large scale interactive motion forecasting
for autonomous driving: The waymo open motion
dataset. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision (ICCV).
Facebook (2013). React. https://reactjs.org/. Accessed
2021-08-22.
Facebook AI (2018). Datasets. https://paperswithcode.com/
datasets. Accessed 2021-08-16.
Feng, D., Haase-Sch
¨
utz, C., Rosenbaum, L., Hertlein,
H., Glaeser, C., Timm, F., Wiesbeck, W., and Diet-
mayer, K. (2020). Deep multi-modal object detection
and semantic segmentation for autonomous driving:
Datasets, methods, and challenges. IEEE Transac-
tions on Intelligent Transportation Systems, 22(3).
Feng, D., Haase-Sch
¨
utz, C., Rosenbaum, L., Hertlein,
H., Glaeser, C., Timm, F., Wiesbeck, W., and
Dietmayer, K. (2021). Deep Multi-modal Ob-
ject Detection and Semantic Segmentation for
Autonomous Driving: Datasets, Methods, and
Challenges. https://boschresearch.github.io/
multimodalperception/dataset.html. Accessed
2021-08-22.
for Image Processing, H. C. (2017). Bosch Small Traf-
fic Lights Dataset. https://hci.iwr.uni-heidelberg.de/
content/bosch-small-traffic-lights-dataset. Accessed
2021-08-12.
Ford (2020). Ford Autonomous Vehicle Dataset. https://
avdata.ford.com/. Accessed 2021-08-20.
FOT-Net (2020). Automated driving datasets.
https://wiki.fot-net.eu/index.php/Automated
Driving Datasets. Accessed 2021-08-20.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013). Vi-
sion meets robotics: The KITTI dataset. International
Journal of Robotics Research (IJRR).
Geyer, J., Kassahun, Y., Mahmudi, M., Ricou, X., Durgesh,
R., Chung, A. S., Hauswald, L., Pham, V. H.,
M
¨
uhlegg, M., Dorn, S., Fernandez, T., J
¨
anicke, M.,
Mirashi, S., Savani, C., Sturm, M., Vorobiov, O.,
Oelker, M., Garreis, S., and Schuberth, P. (2020).
A2d2: Audi autonomous driving dataset. arXiv
preprint:2004.06320.
G
¨
ahlert, N., Jourdan, N., Cordts, M., Franke, U., and
Denzler, J. (2020). Cityscapes 3d: Dataset and
benchmark for 9 DoF vehicle detection. arXiv
preprint:2006.07864.
Google (2018). Datasetsearch - autonomous driv-
ing. https://datasetsearch.research.google.com/
search?query=Autonomous%20driving&docid=
L2cvMTFwd2Y0amZ0Yw%3D%3D. Accessed
2021-08-12.
Heidecker, F., Breitenstein, J., R
¨
osch, K., L
¨
ohdefink, J.,
Bieshaar, M., Stiller, C., Fingscheidt, T., and Sick,
B. (2021). An application-driven conceptualization of
corner cases for perception in highly automated driv-
ing. arXiv preprin:2103.03678.
Hesai, Scale AI (2020). PandaSet by Hesai and Scale AI.
https://pandaset.org/. Accessed 2021-08-05.
Heyuan, L. (2019). lhyfst/awesome-autonomous-driving-
datasets. https://github.com/lhyfst/awesome-
autonomous-driving-datasets. Accessed 2021-08-10.
Houston, J., Zuidhof, G., Bergamini, L., Ye, Y., Jain, A.,
Omari, S., Iglovikov, V., and Ondruska, P. (2020). One
thousand and one hours: Self-driving motion predic-
tion dataset. arXiv preprint:2006.14480.
Hu, Y., Binas, J., Neil, D., Liu, S.-C., and Delbr
¨
uck,
T. (2020). DDD20 end-to-end event camera driv-
ing dataset: Fusing frames and events with deep
learning for improved steering prediction. arXiv
preprint:2005.08605.
INSAAN (2018). India driving dataset. https://
idd.insaan.iiit.ac.in/. Accessed 2021-08-12.
Inst. of Neuroinformatics, Univ. of Zurich and ETH
Zurich (2020). DDD20: end-to-end DAVIS driving
dataset. https://sites.google.com/view/davis-driving-
dataset-2020/home.
INTERACTION Dataset Consortium (2019). INTERAC-
TION Dataset. https://interaction-dataset.com/. Ac-
cessed 2021-08-18.
Jeong, J., Cho, Y., Shin, Y.-S., Roh, H., and Kim, A. (2019).
Complex urban dataset with multi-level sensors from
highly diverse urban environments. The International
Journal of Robotics Research, 38(6).
Kaggle (2021). Datasets - autonomous driv-
ing. https://www.kaggle.com/datasets?search=
Autonomous+Driving&sort=updated. Accessed
2021-08-15.
KAIST (2017). Visual Perception for Autonomous Driv-
ing. https://sites.google.com/view/multispectral. Ac-
cessed 2021-08-22.
Kim, S.-h. and Hwang, Y. (2021). A survey on deep learn-
ing based methods and datasets for monocular 3d ob-
ject detection. Electronics, 10(4).
Krunal (2018). Semantic segmentation datasets for urban
driving scenes. https://autonomous-driving.org/2018/
07/15/semantic-segmentation-datasets-for-urban-
driving-scenes/. Accessed 2021-08-22.
L3Pilot (2019). Opendd. https://l3pilot.eu/data/opendd.
Accessed 2021-08-09.
Laflamme, C.-
´
E. N., Pomerleau, F., and Giguere, P.
(2019). Driving datasets literature review. arXiv
preprint:1910.11968.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
54

Level 5 (2020a). Perception dataset. https://level-5.global/
data/perception/. Accessed 2021-08-20.
Level 5 (2020b). Prediction dataset. https://level-5.global/
data/prediction/. Accessed 2021-08-20.
Maddern, W., Pascoe, G., Linegar, C., and Newman, P.
(2017). 1 year, 1000km: The oxford RobotCar
dataset. The International Journal of Robotics Re-
search (IJRR), 36(1).
Material-UI (2014). The React UI library you always
wanted. https://material-ui.com/. Accessed 2021-08-
22.
Material-UI (2020). Data grid. https://material-ui.com/
components/data-grid/. Accessed 2021-08-22.
Motional (2019a). nuImages. https://www.nuscenes.org/
nuimages. Accessed 2021-08-20.
Motional (2019b). nuScenes. https://www.nuscenes.org/.
Accessed 2021-08-05.
Neumann, L., Karg, M., Zhang, S., Scharfenberger, C.,
Piegert, E., Mistr, S., Prokofyeva, O., Thiel, R.,
Vedaldi, A., Zisserman, A., and Schiele, B. (2018).
NightOwls: A pedestrians at night dataset. In Asian
Conference on Computer Vision.
Nguyen’s, T. (2021). List of public large-scale datasets for
autonomous driving research. https://tin.ng/public-
datasets-for-autonomous-driving-research/. Accessed
2021-08-22.
NightOwls dataset (2018). NightOwls dataset. https://
www.nightowls-dataset.org/. Accessed 2021-08-18.
Oxford Robotics Institute (2017). Oxford robotcar dataset.
https://robotcar-dataset.robots.ox.ac.uk/. Accessed
2021-08-05.
Oxford Robotics Institute (2020). Oxford Radar RobotCar
Dataset. https://oxford-robotics-institute.github.io/
radar-robotcar-dataset/. Accessed 2021-08-18.
Patil, A., Malla, S., Gang, H., and Chen, Y.-T. (2019). The
h3d dataset for full-surround 3d multi-object detec-
tion and tracking in crowded urban scenes. arXiv
preprint:1903.01568.
Pinggera, P., Ramos, S., Gehrig, S., Franke, U., Rother,
C., and Mester, R. (2016). Lost and found: Detect-
ing small road hazards for self-driving vehicles. arXiv
preprint:1609.04653.
Plesa, N. (2021). Machine learning datasets. https://
www.datasetlist.com/. Accessed 2021-08-14.
RadarScenes (2021). RadarScenes. https://radar-
scenes.com/. Accessed 2021-08-16.
RList (2021). List of autonomous driving open datasets.
https://rlist.io/l/list-of-autonomous-driving-open-
datasets?utm source=insights.rlist.io&utm medium=
referral. Accessed 2021-08-16.
Scale (2019). Open datasets. https://scale.com/open-
datasets. Accessed 2021-08-12.
Schafer, H., Santana, E., Haden, A., and Biasini, R. (2018).
A commute in data: The comma2k19 dataset.
Schumann, O., Hahn, M., Scheiner, N., Weishaupt,
F., Tilly, J. F., Dickmann, J., and W
¨
ohler, C.
(2021). RadarScenes: A real-world radar point
cloud data set for automotive applications. arXiv
preprint:2104.02493.
Segment Me If You Can (2021). Datasets. https://
segmentmeifyoucan.com/datasets. Accessed 2021-
08-09.
Sheeny, M., De Pellegrin, E., Mukherjee, S., Ahrabian,
A., Wang, S., and Wallace, A. (2020). RADIATE:
A radar dataset for automotive perception. arXiv
preprint:2010.09076.
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Pat-
naik, V., Tsui, P., Guo, J., Zhou, Y., Chai, Y., Caine,
B., et al. (2020). Scalability in perception for au-
tonomous driving: Waymo open dataset. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition.
Udacity (2020). udacity/self-driving-car. https://
github.com/udacity/self-driving-car/. Accessed 2021-
08-22.
Ulbrich, S., Menzel, T., Reschka, A., Schuldt, F., and Mau-
rer, M. (2015). Defining and substantiating the terms
scene, situation, and scenario for automated driving.
In 2015 IEEE 18th International Conference on Intel-
ligent Transportation Systems.
University of Bonn (2019). SemanticKITTI. http://
www.semantic-kitti.org/. Accessed 2021-08-22.
Varma, G., Subramanian, A., Namboodiri, A., Chandraker,
M., and Jawahar, C. (2019). Idd: A dataset for ex-
ploring problems of autonomous navigation in uncon-
strained environments. In IEEE Winter Conference on
Applications of Computer Vision (WACV).
Vision Lab, Perception and Robotics Group (2020). Heriot-
Watt RADIATE Dataset. http://pro.hw.ac.uk/radiate/.
Accessed 2021-08-12.
Wang, P., Huang, X., Cheng, X., Zhou, D., Geng, Q., and
Yang, R. (2019). The apolloscape open dataset for
autonomous driving and its application. IEEE trans-
actions on pattern analysis and machine intelligence.
Waymo LLC (2019). WAYMO Open Dataset - Perception.
https://waymo.com/open/data/perception/. Accessed
2021-08-07.
Waymo LLC (2021). WAYMO Open Dataset - Mo-
tion. https://waymo.com/open/data/motion/. Ac-
cessed 2021-08-07.
Wenzel, P., Wang, R., Yang, N., Cheng, Q., Khan, Q., Stum-
berg, L. v., Zeller, N., and Cremers, D. (2020). 4sea-
sons: A cross-season dataset for multi-weather SLAM
in autonomous driving. arXiv preprint:2009.06364.
Wikipedia (2021). List of datasets for machine-
learning research. https://en.wikipedia.org/
wiki/List of datasets for machine-learning
research#Object detection and recognition. Ac-
cessed 2021-08-15.
Wrenninge, M. and Unger, J. (2018). Synscapes: A pho-
torealistic synthetic dataset for street scene parsing.
arXiv preprint:1810.08705.
Xie, J., Kiefel, M., Sun, M.-T., and Geiger, A. (2016). Se-
mantic instance annotation of street scenes by 3d to 2d
label transfer. In Conference on Computer Vision and
Pattern Recognition (CVPR).
Yin, H. and Berger, C. (2017). When to use what data set
for your self-driving car algorithm: An overview of
Ad-datasets: A Meta-collection of Data Sets for Autonomous Driving
55

publicly available driving datasets. In IEEE 20th In-
ternational Conference on Intelligent Transportation
Systems (ITSC).
YonoStore (2021). Datasets. https://store.yonohub.com/
product-category/datasets/?filters=product cat[19].
Accessed 2021-08-12.
Yu, F., Chen, H., Wang, X., Xian, W., Chen, Y., Liu, F.,
Madhavan, V., and Darrell, T. (2020). Bdd100k: A
diverse driving dataset for heterogeneous multitask
learning. In IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Zendel, O., Honauer, K., Murschitz, M., Steininger, D., and
Dominguez, G. F. (2018). WildDash - creating hazard-
aware benchmarks. In Proceedings of the European
Conference on Computer Vision (ECCV).
Zhan, W., Sun, L., Wang, D., Shi, H., Clausse, A., Nau-
mann, M., K
¨
ummerle, J., K
¨
onigshof, H., Stiller, C.,
Fortelle, A. d. L., and Tomizuka, M. (2019). IN-
TERACTION dataset: An INTERnational, adver-
sarial and cooperative moTION dataset in interac-
tive driving scenarios with semantic maps. arXiv
preprint:1910.03088.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
56
