
Design of a Guideline for Range-based Localization Algorithms
Evaluation using Multiple Linear Regressions
Dhouha El Houssaini
1,2
, Zaid Abdullah
1
, Sabrine Kheriji
2,3
, Kamel Besbes
1
and Olfa Kanoun
1
1
Chair for Measurement and Sensor Technology, Technische Universit
¨
at, 09111 Chemnitz, Germany
2
Microelectronics and Instrumentation Laboratory, Faculty of Sciences of Monastir, 1002, Tunisia
3
Centre for Research on Microelectronics and Nanotechnology, Technopark of Sousse, 4000, Tunisia
Keywords:
WSNs, Localization, Range-based, Multiple Linear Regression, Guideline, IoT.
Abstract:
Localization is an essential feature in numerous Wireless Sensor Network (WSN) applications, including
tracking, health monitoring, and military supervision. Analytical modeling and analysis of the localization
system remain challenging and infeasible since it offers oversimplified results with limited reliability to the
evaluated cases. Likewise, disseminating test-beds involves a lot of effort, making the simulation phase indis-
pensable to study the WSN localization. The defined localization model needs to ensure solid and pragmatic
network assumptions during the simulation. However, most network simulators don’t meet specific criteria re-
lated to network definition, such as scalability and heterogeneity. As part of this endeavor, a guideline for eval-
uating and analyzing technical methods of range-based localization is developed. Multiple linear regression is
used to generate the different localization instances, which enables to support different and non-dependent pa-
rameters. The developed guideline for range-based localization is tested and validated for existing localization
solutions.
1 INTRODUCTION
In Wireless Sensor Networks (WSNs), sensor nodes
are installed in the field of interest to monitor and
provide certain physical and environmental informa-
tion, such as the temperature, humidity, and activity
of monitored quantities (Kanoun et al., 2021). The
Localization of these installed nodes is critical and
required for different applications, like object track-
ing, process supervision, and monitoring (El Hous-
saini et al., 2020; Naguib et al., ). Besides, following
the urgent trend to include the Internet of Things (IoT)
concept, the location information remains critical and
necessary for remote control and supervision activi-
ties (Ahmed Mansoor and Irtaza, 2019). The knowl-
edge of the position of installed nodes serves during
the network activities such as the routing, data trans-
mission, and network topology (Khriji et al., 2018;
Paul and Sato, 2017; Egea-Lopez et al., 2005; Ab-
delhabib and Brahim, 2008). Indeed, the node’s lo-
cation is critical to ensure better network function-
ality and enhance the lifetime of the node itself and
the complete network. It is essential to effectively
decide upon the localization technique for the net-
work assumptions and characteristics, such as the net-
work size, environment (indoor/outdoor, the existence
of obstacles, mobile system, etc.), hardware specifi-
cation (sensing and communication range and power
module) and energy constraints. Thus, the realization
of a specific test-bed is extremely expensive and chal-
lenging. Furthermore, the implementation of real ex-
periments always takes more time than the simulation.
Therefore, simulation phase is crucial for the develop-
ment of WSNs.
The use of WSNs simulators allows users to sep-
arate numerous factors to evaluate and test their ap-
proaches, like flexible network size, different sensing
and communication ranges, and predefined commu-
nication modules. Various free and open-source sim-
ulators are commercialized in the market, with some
advantages. NS2 is a discrete event-driven simula-
tor, mainly used for academic research in the areas
of computer networks, MANETs, and WSNs (Hogie
et al., 2006). It is built based on C++ and supports
a wide range of protocols. It also provides complete
support of communication protocol. The main lim-
itation of NS2 is its graphical interface, as it only
provides a simple reflection of the network. It does
not allow the scalability and extension of the net-
work. Furthermore, NS3 was developed based on the
256
El Houssaini, D., Abdullah, Z., Kheriji, S., Besbes, K. and Kanoun, O.
Design of a Guideline for Range-based Localization Algorithms Evaluation using Multiple Linear Regressions.
DOI: 10.5220/0011013100003118
In Proceedings of the 11th International Conference on Sensor Networks (SENSORNETS 2022), pages 256-262
ISBN: 978-989-758-551-7; ISSN: 2184-4380
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

main concepts of NS2 (Nsam, ). It integrates Ne-
tAnim module for the graphical simulation of a net-
work model. Additionally, different simulators in-
tegrate GUI interfaces. One example is OMNET++
(Omnet, ), which is an example of a modular discrete
event simulator written in C++ and provides a power-
ful GUI library for animation and tracing and debug-
ging support. However, their libraries remain limited
compared to other simulators, as they don’t support
enough protocols for communication and transmis-
sion. For instance, J-sim (Java Simulator) (JSim, )
is a compositional simulation environment. It is built
according to the component-based software paradigm
called autonomous component architecture (ACA). J-
Sim has the advantage of supporting many protocols,
including a highly detailed simulation of WSNs plus
Localization features. However, the JSim develop-
ment is closed, and its scale is medium.
This paper aims to develop a generalized guide-
line, which identifies the appropriate localization
technique for the test network. It considers the def-
inition of the deployment environment (Network size
and path loss exponent) and the system assumptions,
such as the sending power and the communication
range. The guideline implements a multiple regres-
sion module to build the decision upon the choice of
the localization technique. The comparison is based
on the localization accuracy and measurement error.
The remainder of the paper is organized as fol-
lows: Section 2 illustrates the related works pre-
senting an overview of range-based localization tech-
niques. In section 3, the proposed evaluation guide-
line is provided. Section 4 presents some test and
evaluation results. Finally, a conclusion is provided
in Section 5.
2 RELATED WORKS
The localization techniques can be classified into two
main categories: Range-based and range-free. The
range-based technique uses the distance or range in-
formation to determine the position of a node, such as
Global Positioning System (GPS), Angle of Arrival
(AoA), Time of Arrival (ToA), Time Difference of Ar-
rival (TDoA), and Received Signal Strength Indicator
(RSSI) (Alsheikh et al., 2014; Bekcibasi and Tenruh,
2014). As for the range-free techniques, the posi-
tion estimation relies on connectivity information be-
tween two nodes (Singh and Sharma, 2015). They use
radio connectivity to communicate among the nodes
to estimate their locations, so no coordinates system
is used. The position of the target node can be ob-
tained by applying geometrics relations. Most range-
free techniques are based on the number of surround-
ing neighbors known as DV-Hop, Approximate Point-
In-Triangulation test (APIT), or centroid system. DV
hop (Hu and Li, 2013; Liu et al., 2016) estimates the
range between nodes using the hop count. Indeed, by
comparing and evaluating the performance and lim-
itations of these methods, it is necessary to find a
trade-off between centralized and distributed topolo-
gies combining low energy consumption and local-
ization accuracy. Considering the application require-
ments and constraints, such as low energy consump-
tion, secure data transmission, and efficiency, the lo-
calization technique can differ from one application
to another. For this purpose, it is necessary to ef-
ficiently simulate and evaluate the localization tech-
nique before the realization and implementation to en-
sure better network performance. Various research
efforts were performed to qualitatively classify and
review the range-based localization techniques. Us-
ing the Web of Science database, research for English
articles including the words ”localization WSN* sur-
vey” or ”Localization WSN* review” or ”localisation
WSN* survey” or ”Localisation WSN* review” (* to
include the plural) in their title, abstracts or keywords.
The first-round results in 53 review papers related to
localization techniques in WSN. After reading their
abstracts, 42 papers are excluded because they are un-
related to reviews on Localization in WSN. The 11
remaining papers are analyzed here.
Authors in (Saad et al., 2018) classified localiza-
tion techniques into five categories, but they focus
only on the ranging technique, which is divided into
range-based and range-free methods. An overview of
the AoA, TDoA, and RSSI in the range-based meth-
ods is provided. Four range-free techniques are il-
lustrated: Centroid, APIT, DV-Hop, and Amorphous.
To compare the performance of the described tech-
niques, some metrics are considered, including ac-
curacy, scalability, cost, and power consumption. In
(Sneha and Nagarajan, 2020), the localization tech-
niques are classified as proximity-based, range-based,
and range-free Localization. The factors influenc-
ing the localization measurement are studied. A gen-
eral comparative analysis of only the range-based and
range-free methods is discussed in terms of accuracy,
cost, power consumption, and additional hardware re-
quirements. Then, a comparison between RSSI, AoA,
TDoA/ToA is performed by describing their advan-
tages and disadvantages. In (Khelifi et al., 2015),
the advantages and drawbacks of the range-based and
range-free localization technique are described. Au-
thors proved that it is hard to find the best algorithm,
which dominates by all criteria. Authors in (Ismail
et al., 2021) discussed the localization techniques us-
Design of a Guideline for Range-based Localization Algorithms Evaluation using Multiple Linear Regressions
257
ing GPS, range-based methods including RSSI, ToA,
AoA, and TDoA and range-free methods such as cen-
troid, DV-Hop, Amorphous. The discussed reviews
are summarized in Table 1.
Table 1: List of survey papers studying range-based local-
ization technique.
Ref. Comparison parameters
(Khelifi et al., 2015)
Energy, accuracy, complexity, hardware
requirement, communication traffic, coverage
(Saad et al., 2018) Accuracy, scalability, cost, power consumption
(Sneha and Nagarajan, 2020)
Accuracy, cost, power consumption,
requirement for additional hardware
(Ismail et al., 2021)
Principal of operation, special hardware,
attenuation problem, cost
Existing reviews perform the comparison with
certain configuration parameter, such as the network
size, number of nodes, deployment strategy, energetic
model. Thereby, obtained results remain valid only
for some instances, and there is no generalized eval-
uation combining all performance metrics. Indeed,
there is no quantitative comparison aiming to improve
the existing techniques. Thus, which algorithm is the
best for a specific scenario remains open. These short-
comings motivate us to develop a methodology for a
generalized comparison. The paper aims to develop a
guideline that englobes the most relevant range-based
localization techniques.
3 DESIGN OF THE EVALUATION
GUIDELINE
In the localization method, the estimation of the
coordinates of nodes varies from one technique to
the other, where the network definition and char-
acteristics describe the input parameters of the sys-
tem. Sine, the performance evaluation of these tech-
niques, presents a multidimensionality problem, ma-
chine learning-based model offers a promising solu-
tion to support the use of various non-dependent in-
put parameters. The localization evaluation guideline
offers a generic comparison module of the basic local-
ization techniques. The system is based on a multiple
linear regression module, which enables an overview
of the complete localization scenario, where a predic-
tive module is attributed. In this guideline, the path
loss exponent, the communication range of nodes, and
the sending power all contribute to determining accu-
racy and position error. The choice of a suitable local-
ization technique depends on the network specifica-
tion and the application requirement and is highly in-
fluenced by these definitions and initializations. Ob-
tained results are identified for the four main range-
based localization techniques. It offers an under-
standing of suitable localization techniques in terms
of localization accuracy. The system includes five
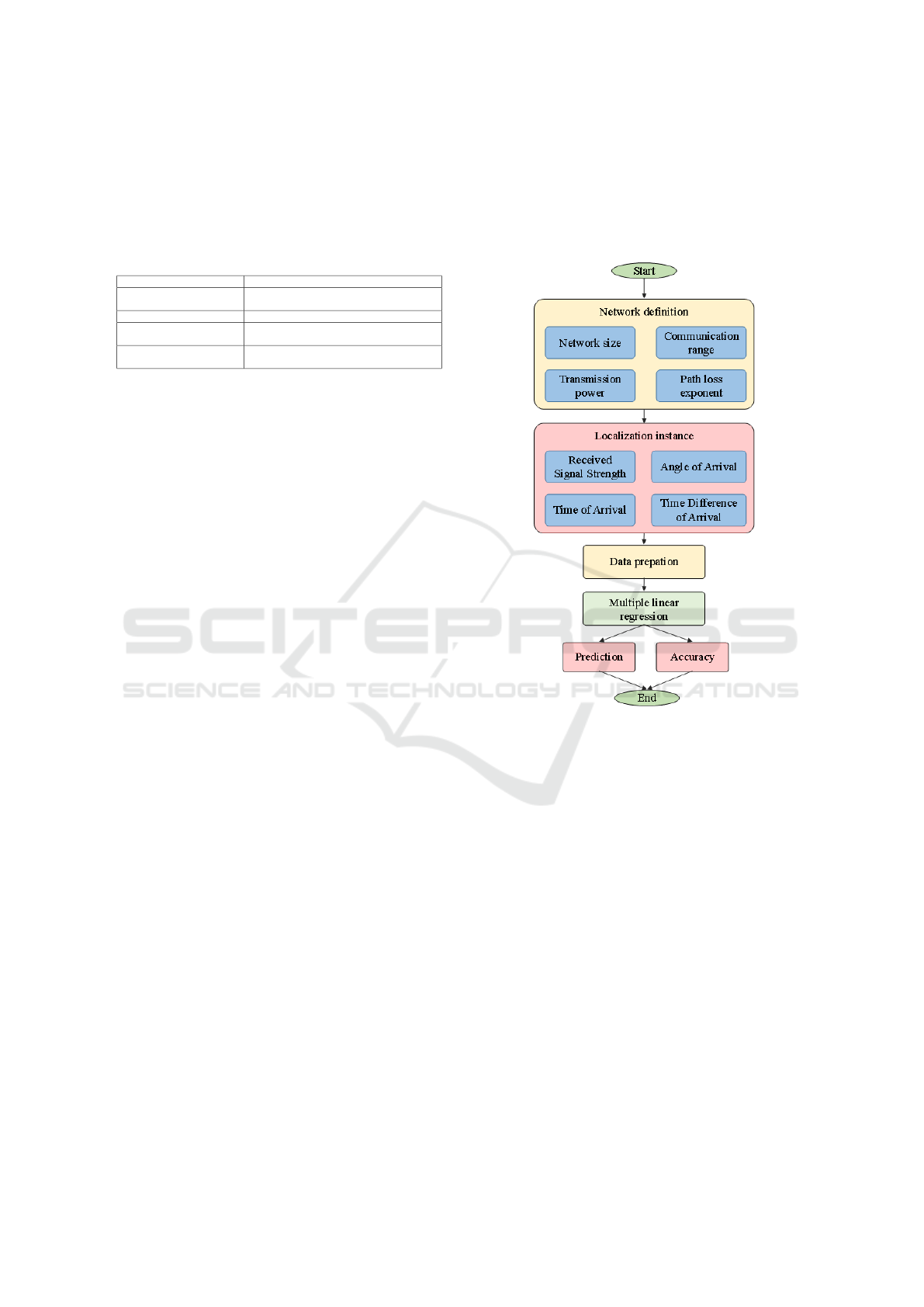
main blocks: Network initialization, localization in-
stance, data preparation, multiple regression module,
and evaluation (see Figure 1). In the network initial-
ization, parameters related to the network definition
are initialized.
Figure 1: Block diagram of the evaluation guideline for
range-based localization algorithms.
It contains information about the network size ex-
pressed as Width and Length, the path loss expo-
nent to highlight the environment characterization (in-
door/outdoor, free space/ interferences), the commu-
nication range of nodes, and the sending power. The
input parameters are as follows:
• Transmission power of the sensor node;
• Network size of the area of interest, Width ×
Length;
• Environmental coefficient: Path loss exponent η;
• Communication range of sensor nodes R
c
;
Considering these inputs, the localization instance
is created for each localization technique concerning
its defined equation. Later, the calculated data of each
localization instance are prepared as input to the re-
gression module to estimate the position of nodes.
After that, a prediction module and accuracy evalu-
ation are carried out. Once all instances are created
EWSN-IoT 2022 - Special Session on Energy-Aware Wireless Sensor Networks for IoT
258

and evaluated, the most suitable localization tech-
nique corresponding to the network initialization is
proposed in terms of localization accuracy and posi-
tion estimation error.
3.1 Localization Module
The first phase of the guideline revolves around four
basic range-based wireless sensor localization algo-
rithms. The algorithms are implemented individually
using the algorithms themselves. Four different func-
tions are responsible for the Localization, which run
the following sequence.
• f un
r
ssi takes input and runs RSSI algorithm;
• f un
t
oa takes input and runs ToA algorithm;
• f un
t
doa takes input and runs TDoA algorithm;
• f un
a
oa takes input and runs AoA algorithm.
All these algorithms take the same set of inputs,
enabling respective functions to create the files and
save the data for several iterations as a .csv file. This
.csv is then later read by machine learning.
3.2 Regression Module
The performance and selection of machine learning
algorithms are solely based on the available datasets.
Although no algorithm has superiority over another
algorithm, there are some traits and properties of each
algorithm, which can be considered by tuning the
hyper-parameters. The regression module enables the
analysis of multi-factor data, which helps decide over
the most suitable localization techniques based on the
input parameters. The regression module permits to
translate the localization choice into a mathematical
model describing the relationship between the depen-
dent and independent variables. More precisely, the
regression module allows mapping the results based
on numeric inputs. The general mathematical module
of multiple linear regression is illustrated in Equation
1.
y
i
= β
0
+ β
1
x
1
+ β
2
x
2
+ ... + β
p
x
p
+ ε (1)
where, for i = n observations, x
i
, y
i
are the depen-
dent and explanatory variables, respectively. β
0
is the
y-intercept (constant term), β
p
is the slope coefficient
for each explanatory variable and is the residual value.
The input parameters of the regression module are
the localization instances of each localization tech-
nique. Distances between nodes are estimated based
on each range-based technique. Once the distances
are estimated, a simple trilateration method is carried
out to estimate the coordinates of nodes. 10000 sam-
ples for each localization technique are created based
on the experiment. 80 % of the total number of sam-
ples is defined to train the regression module to iden-
tify each localization technique. The remaining 20 %
of samples are used later to evaluate and test the re-
gression module.
4 TEST AND EVALUATION
The design of the proposed guideline is based on in-
built, reusable modules, which use the Python pro-
gramming language. Python provides a powerful and
easy-to-use programming tool, which supports exten-
sive machine learning computations. Also, it allows
access to complete library support that integrates ma-
chine learning and mathematical models. A user-
friendly, easy-to-use, and flexible guideline is pro-
posed in this work. It allows the user to define its
network parameters, like the network dimensions, the
path loss exponent, and sensor nodes characteristics.
Figure 2 illustrates the designed interface. The inter-
face allows the user to define all network assumptions
that characterize the test field. As output and based
on the localization aspect, the decision of the suitable
localization technique is made based on the accuracy.
Figure 2: Illustration of the developed guideline; data inputs
and network definition.
In the background, the input variables are col-
lected to define the localization instance for each
range-based technique. The most suitable localization
technique is defined according to the used nodes, lo-
calization error, and inaccuracy. Indeed, the proposed
system offers different graphical results to understand
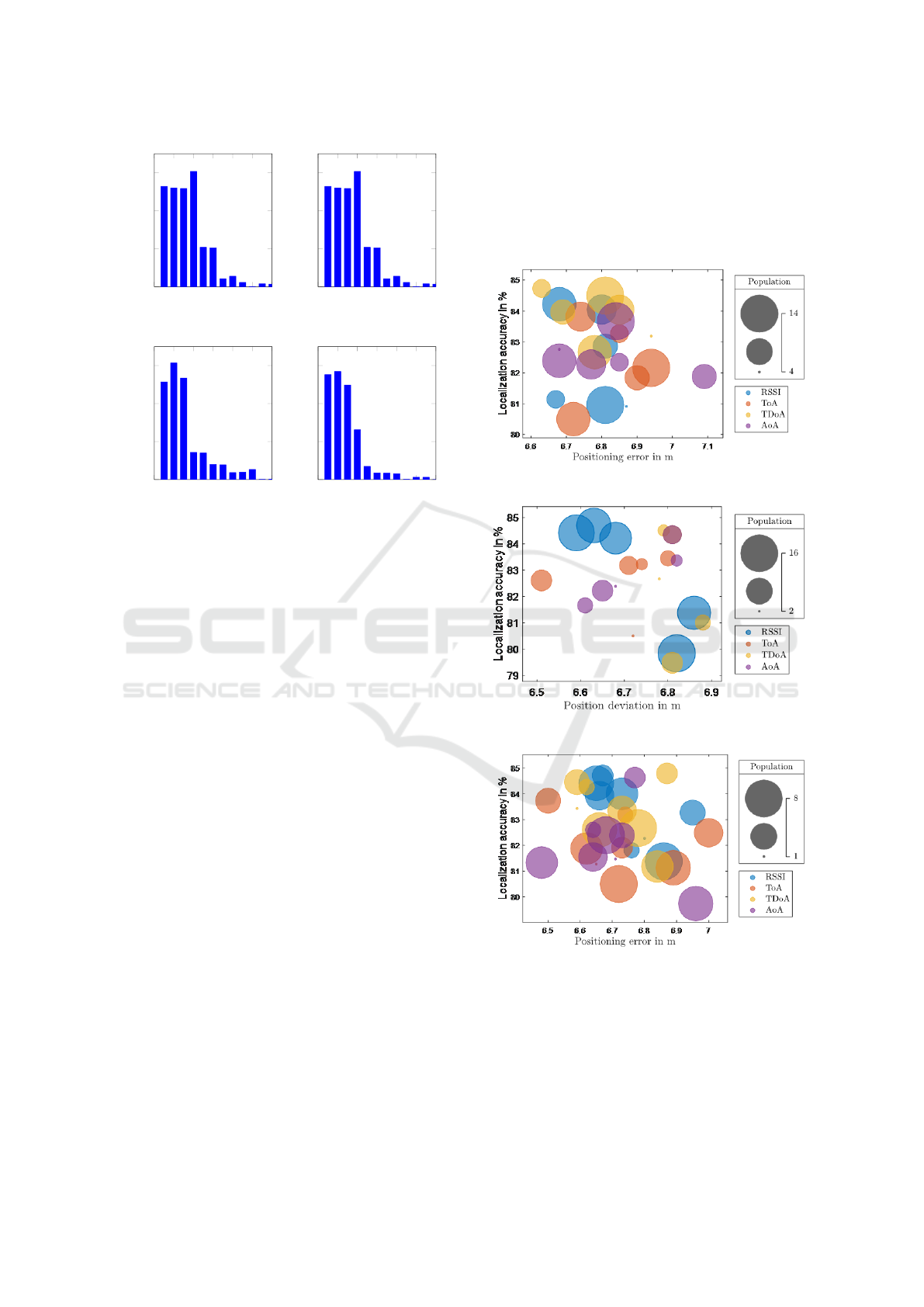
the comparison results better. The first graphical com-
parison is a histogram modeling, as presented in Fig-
ure 3. The illustrated results are for the localiza-
tion error over various possible nodes collections. It
presents a comparative analysis of the nodes deployed
in the system. This is an accuracy graph, which shows
the cumulative accuracy of the system. The x-axis
shows the average Localization by plotting the error
of each node, and the y-axis shows the total number of
nodes. It gives an impression of the density of nodes
and their respective localization errors.
Design of a Guideline for Range-based Localization Algorithms Evaluation using Multiple Linear Regressions
259
0 0.5 1 1.5 2 2.5 3
0
100
200
300
RSSI
Location error in m
Number of nodes
(a)
0 0.5 1 1.5 2 2.5 3
0
100
200
300
ToA
Location error in m
Number of nodes
(b)
0 0.5 1 1.5 2 2.5 3
0
100
200
300
TDoA
Location error in m
Number of nodes
(c)
0 0.5 1 1.5 2 2.5 3
0
100
200
300
AoA
Location error in m
Number of nodes
(d)
Figure 3: Error distribution of range-based localization
technique for a network size of 15 × 20 m
2
, communica-
tion range R
C
=, transmission power of −70 dBm and path
loss exponent of η = 4.
In this work, the influence of the network defini-
tion is studied. In fact, during the localization phase,
nodes are placed in a specific network with specific
hardware characterization. Each parameter may di-
rectly impact the choice of the localization technique
itself. In the following, the guideline is tested for dif-
ferent scenarios: (1) influence of network size, (2)
influence of path loss exponent, and (3) influence of
communication range of the installed nodes. Figure
4 summarize the obtained results for the three test
scenarios. It proves that the choice of the suitable
localization technique is strongly dependent on the
network definition. For example, for large-scale net-
works, the outperforms other localization techniques
(Figure 4a ), whereas the works better for small-scale
networks. The path exponent presents the effect of the
network’s scale impact, as it defines the environmen-
tal characteristic. It helps to identify if there exists
some interference and shadowing in the network and
if the signal is propagating in the line of sight. Figure
4b illustrates the effects of the path loss exponent on
the choice of the Localization.
It is clear that for the free space environment
(η = 2) (Figure 4c ), the RSSI outperforms other tech-
niques, whereas, in the case of industrial environ-
ments and buildings (η = 2), the AoA technique gives
better results. In the last scenario, the communica-
tion range of the instated nodes is studied. The com-
munication range enables deciding if the network is
covered or not, which helps reduce energy consump-
tion and maintain communication between installed
nodes. If the communication range increases, the lo-
calization capabilities increase, which helps reduce
the measurement error.
(a)
(b)
(c)
Figure 4: Performance evaluation of range-based localiza-
tion techniques: (a) Influence of network size, (b) influence
of path loss exponent and (c) influence of communication
range.
Finally, the proposed guideline is validated using
different types of localization algorithms, and each
one is implemented using different methods. Many
EWSN-IoT 2022 - Special Session on Energy-Aware Wireless Sensor Networks for IoT
260
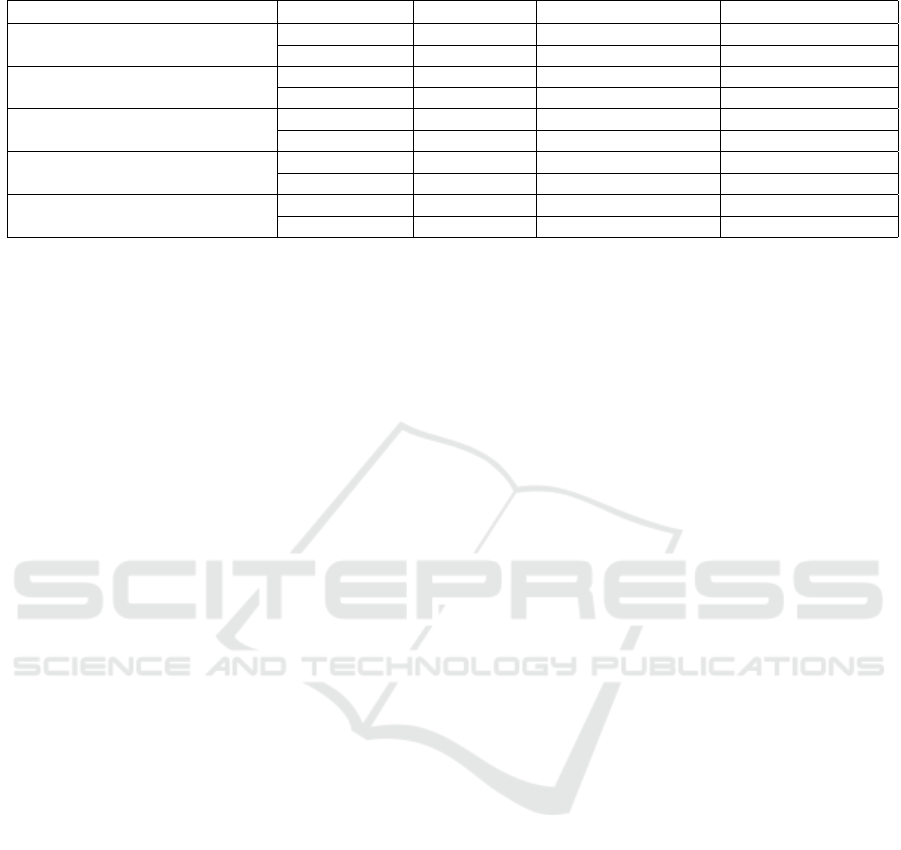
Table 2: Comparison of the developed guideline to the result of some localization algorithms.
Ref. Test field (m
2
) Accuracy (%) Localization error (m) Computation time (s)
(Weingartner et al., 2009) 20
4 A + 25 NN
98 0.5 2.01
(Weingartner et al., 2009) * 98.32 0.256 4.07
(Rahman et al., 2012) 100
15 A + 35 NN
81 4 10.54
(Rahman et al., 2012) * 89.23 5.25 3.2
(Ahmadi and Bouallegue, 2015) 20
3 A + 15 NN
95 0.409 3.2
(Ahmadi and Bouallegue, 2015) * 97.49 0.34 4.79
(Jin et al., 2010) 100
30 A + 100 NN
65 9 5
(Jin et al., 2010) * 93 4.32 5.84
(Wang et al., 2009)
3 A + 1 NN
75 5 3.33
(Wang et al., 2009) * 93.77 0.95 5.7
scenarios validate our guideline to study the effects
of different parameters on the design. As seen in Ta-
ble 2, obtained results are compatible with the orig-
inal results reported by the selected localization al-
gorithms in their papers. Different localization al-
gorithms have been tested using the proposed guide-
line. The selected localization algorithm are chosen
based on their achieved localization accuracy. Be-
sides, the selected works implements some artificial
intelligence technique for the determination of the
nodes’ location. We selected different works based
on RSSI techniques only since its strongly dependent
of the deployment environment and sending power of
the nodes. As illustrated in Table 2, obtained results
remain compatible with those reported by selected lo-
calization algorithms in their papers. In (Weingartner
et al., 2009) authors propose an RSSI-based localiza-
tion system. Their simulation achieved 98 % accu-
racy, compared to our guideline, which shows 98.32
% with a reduced error. In (Rahman et al., 2012), au-
thors propose an RSSI-based system, which uses the
regression Tree by comparing its performance with
Least Squares Support Vector Regression and Multi
Layers Perceptron Neural Network. The evaluation
considers the localization error and the complexity of
the algorithm. Using the regression tree, they reached
81 % of localization accuracy. Considering the same
network definition, the proposed work in (Rahman
et al., 2012) is tested using the developed guideline,
where the localization accuracy reached 89 %. Simi-
larly, authors in (Ahmadi and Bouallegue, 2015) pro-
pose a fingerprint-based localization scheme that con-
siders the channel impulse response to computing the
location of nodes. The distance and position esti-
mation is carried out using non-parametric kernel re-
gression. The localization accuracy reached 95 %,
whereas, in the developed guideline, the total local-
ization accuracy is around 97 %, with a minimal lo-
calization error of 0.34 m. In (Jin et al., 2010), the
RSS-based lateration method is used to compute the
location of nodes. In their work, the authors provided
two approaches, regression-based and correlation-
based. The regression-based approach uses linear re-
gression to discover a better fit of the signal propaga-
tion model between RSS and the distance. In contrast,
the correlation-based approach utilizes RSS correla-
tion in the local area to obtain more accurate signal
propagation. As a result, they obtained 65 % for local-
ization accuracy. In paper (Wang et al., 2009), RSSI
information is used to estimate the position of nodes.
The estimated localization accuracy is around 75 %,
compared with the accuracy of the guideline of 93 %.
A preliminary study on the evaluation of range-
based localization techniques is proposed in this
work. An evaluation guideline is presented. It en-
ables to build a better knowledge of the performance
of the localization techniques with the definition of
the network assumptions, mainly, the network size,
communication range, and sending power. This pre-
liminary study provides a good insight for evaluating
the localization range-based technique, where the de-
veloped guideline is based on the different localiza-
tion instances. However, a more detailed study and
evaluation are required to ensure better functionality
of the developed guideline in terms of dependency to
the real-world scenario (e.g., Existence of obstacles,
hardware failure) and dependency on the localization
constraints (e.g., Energy consumption and lifetime).
As a future perspective, a study on design constraints
will be considered along with different localization
techniques. Moreover, the multiple linear regression
module will be compared with another possible alter-
native, which can improve the flexibility and robust-
ness of the developed system.
5 CONCLUSIONS
A generic evaluation guideline based on multiple lin-
ear regression is developed for range-based localiza-
tion techniques. The results enable a better choice of
which standard localization technique to implement.
The localization techniques are evaluated based on
their accuracy and localization error. Having com-
Design of a Guideline for Range-based Localization Algorithms Evaluation using Multiple Linear Regressions
261

pared the guideline results with the results of the se-
lected localization algorithms, it was found that they
had been consistent with the original results of these
algorithms in their original papers. In the future, other
localization algorithms can be incorporated into the
guideline, which can be used by other researchers.
For better assumptions considerations, it is neces-
sary to include the energetic module and deployment
strategies in the design. Moreover, the evaluation
metrics (accuracy) can be extended to network life-
time, energy consumption, and communication.
REFERENCES
Abdelhabib, B. and Brahim, B. (2008). Japrosim: a java
framework for process interaction discrete event sim-
ulation. Journal of Object Technology, 7(1):103–119.
Ahmadi, H. and Bouallegue, R. (2015). Rssi-based local-
ization in wireless sensor networks using regression
tree. In 2015 International Wireless Communications
and Mobile Computing Conference (IWCMC), pages
1548–1553. IEEE.
Ahmed Mansoor, S. and Irtaza, M. (2019). IOT localization
in Smart Buildings. PhD thesis, Department of Com-
puter and Electrical Engineering, COMSATS Univer-
sity.
Alsheikh, M. A., Lin, S., Niyato, D., and Tan, H.-P. (2014).
Machine learning in wireless sensor networks: Algo-
rithms, strategies, and applications. IEEE Communi-
cations Surveys & Tutorials, 16(4):1996–2018.
Bekcibasi, U. and Tenruh, M. (2014). Increasing rssi lo-
calization accuracy with distance reference anchor in
wireless sensor networks. Acta Polytechnica Hungar-
ica, 11(8):103–120.
Egea-Lopez, E., Vales-Alonso, J., Martinez-Sala, A. S.,
Pavon-Marino, P., and Garc
´
ıa-Haro, J. (2005). Sim-
ulation tools for wireless sensor networks. In Summer
Simulation Multiconference-SPECTS, volume 2005.
El Houssaini, D., Khriji, S., Besbes, K., and Kanoun, O.
(2020). Iot based tracking of wireless sensor nodes
with rssi offset compensation. In 2020 17th Inter-
national Multi-Conference on Systems, Signals & De-
vices (SSD), pages 897–902. IEEE.
Hogie, L., Bouvry, P., and Guinand, F. (2006). An overview
of manets simulation. Electronic notes in theoretical
computer science, 150(1):81–101.
Hu, Y. and Li, X. (2013). An improvement of dv-hop
localization algorithm for wireless sensor networks.
Telecommunication Systems, 53(1):13–18.
Ismail, M. I. M., Dziyauddin, R. A., Ahmad, R., Ahmad, N.,
Ahmad, N. A., and Hamid, A. M. A. (2021). A review
of energy harvesting in localisation for wireless sensor
node tracking. IEEE Access.
Jin, Y., Soh, W.-S., and Wong, W.-C. (2010). Indoor local-
ization with channel impulse response based finger-
print and nonparametric regression. IEEE Transac-
tions on Wireless Communications, 9(3):1120–1127.
JSim. Jsim home page. https://www.physiome.org/jsim/.
Accessed: 06-12-2021.
Kanoun, O., Bradai, S., Khriji, S., Bouattour, G., El Hous-
saini, D., Ben Ammar, M., Naifar, S., Bouhamed, A.,
Derbel, F., and Viehweger, C. (2021). Energy-aware
system design for autonomous wireless sensor nodes:
A comprehensive review. Sensors, 21(2):548.
Khelifi, M., Moussaoui, S., Silmi, S., and Benyahia, I.
(2015). Localisation algorithms for wireless sensor
networks: A review. International Journal of Sensor
Networks, 19(2):114–129.
Khriji, S., El Houssaini, D., Kammoun, I., and Kanoun, O.
(2018). A fuzzy based energy aware unequal clus-
tering for wireless sensor networks. In International
Conference on Ad-Hoc Networks and Wireless, pages
126–131. Springer.
Liu, J., Wang, Z., Yao, M., and Qiu, Z. (2016). Vn-apit: Vir-
tual nodes-based range-free apit localization scheme
for wsn. Wireless Networks, 22(3):867–878.
Naguib, A., Hamouda, A., Abdel-Mageid, S., and Marie,
M. Development and validation of a localization
framework for wireless sensor networks.
Nsam. Ns3, network simulator. https://www.nsnam.org/.
Accessed: 06-12-2021.
Omnet. Omnet++, discrete event simulator. omnet++ dis-
crete event simulator. https://omnetpp.org/. Accessed:
06-12-2021.
Paul, A. K. and Sato, T. (2017). Localization in wireless
sensor networks: A survey on algorithms, measure-
ment techniques, applications and challenges. Journal
of sensor and actuator networks, 6(4):24.
Rahman, M. S., Park, Y., and Kim, K.-D. (2012). Rss-
based indoor localization algorithm for wireless sen-
sor network using generalized regression neural net-
work. Arabian journal for science and engineering,
37(4):1043–1053.
Saad, E., Elhosseini, M., and Haikal, A. Y. (2018). Re-
cent achievements in sensor localization algorithms.
Alexandria engineering journal, 57(4):4219–4228.
Singh, S. P. and Sharma, S. (2015). Range free localiza-
tion techniques in wireless sensor networks: A review.
Procedia Computer Science, 57:7–16.
Sneha, V. and Nagarajan, M. (2020). Localization in wire-
less sensor networks: A review. Cybernetics and In-
formation Technologies, 20(4):3–26.
Wang, Y., Xu, X., and Tao, X. (2009). Localization in wire-
less sensor networks via support vector regression. In
2009 Third International Conference on Genetic and
Evolutionary Computing, pages 549–552. IEEE.
Weingartner, E., Vom Lehn, H., and Wehrle, K. (2009).
A performance comparison of recent network simula-
tors. In 2009 IEEE International Conference on Com-
munications, pages 1–5. IEEE.
EWSN-IoT 2022 - Special Session on Energy-Aware Wireless Sensor Networks for IoT
262
