
Comparison of Free and Open PPP Services for Master-base
Positioning in Geodetic Disadvantaged Areas: Case Study along
the Sirba River in Sub-Saharan Africa
Elena Belcore
1a
, Marco Piras
1b
, Paolo Dabove
1c
, Giovanni Massazza
2d
and Maurizio Rosso
1e
1
Politecnico di Torino, DIATI, Department of Environment, Land and Infrastructure Engineering, 10129 Turin, Italy
2
Agenzia Interregionale per Il Fiume Po (AIPo), 10024 Moncalieri, Italy
giovanni.massazza@agenziapo.it
Keywords: Point Positioning, High-precision GNSS, NRTK, Free and Open Services, Sub-Saharan Africa, Niger, Sirba
River, Sahel, Topographic Survey, Geodetic Disadvantaged Areas.
Abstract: The Precise Point Positioning (PPP) is a Global Navigation Satellite System (GNSS technique) for post- and
real-time processing. PPP has recently spread thanks to the high precision and accuracy positioning results
that it provides. Until some years ago, this technique was limited by long sessions of measurements and
professional software to obtain results with centimetre-level precision, using only one GNSS dual frequency
receiver. Nowadays, the PPP technique is well established among GNSS experts, and many software exists
to perform it. The PPP technique uses data from continuously operating reference stations (CORS) to process
the pseudo-range and carrier phase measurements. CORS can also be located very far from the surveyed area.
This makes PPP particularly suitable for GNSS surveys in areas considered disadvantaged for the lack of
geodetic infrastructures, such as CORS and known-coordinates points. Recently, PPP online free and open
tools have been made available by national agencies worldwide. This contribution analyses the PPP online
services as potential solutions for realising GNSS surveys in geodetic disadvantaged areas. Specifically, it
compares two PPP online services: the Canadian Spatial Reference System Precise Point Positioning tool
(CSRS-PPP) and Automatic Precise Positioning Service (APPS). In the analysis, the AUSPOS Online GPS
processing service that applies relative positioning technique based on the closest CORS was considered a
non-PPP post-processing online tool to compare results. Data were collected in South-West Niger, along Sirba
River, 900 km away from the closest CORS and 250 km far from the closest known-coordinates point. The
estimated coordinates' precision was tested for different session lengths (three scenarios of 3 hours, 1 hour,
and 30 minutes) over 17 sessions. Then, the precision was validated by analysing the one-year daily
acquisitions dataset (from CORS). The results revealed precisions and relative accuracies lower than 5 cm for
three hours' sessions. From the analysis of the short stationing sessions (i.e., one hour and half hour) emerged
that APPS provides the most confident solutions. As expected, the less performant service in CORS-
depressed areas is the relative positioning service AUSPOS.
1 INTRODUCTION
In the past years, the Global Navigation Satellite
System (GNSS) has overcome traditional survey
methods, becoming a standard tool in many surveying
sectors. Nowadays, GNSS systems play a lead role in
a
https://orcid.org/0000-0002-3592-9384
b
https://orcid.org/0000-0001-8000-2388
c
https://orcid.org/0000-0001-9646-523X
d
https://orcid.org/0000-0001-8831-4925
e
https://orcid.org/0000-0001-9504-0512
data acquisition thanks to the increasing number of
satellites, the low costing, the efficiency, and the
variety of available products. From 2002 forward
(Eren Kamil et al., 2009) Real-Time Kinematic
networks (NRTK) have spread. These networks are
composed of GNSS stations of known coordinates,
Belcore, E., Piras, M., Dabove, P., Massazza, G. and Rosso, M.
Comparison of Free and Open PPP Services for Master-base Positioning in Geodetic Disadvantaged Areas: Case Study along the Sirba River in Sub-Saharan Africa.
DOI: 10.5220/0011039600003185
In Proceedings of the 8th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2022), pages 37-47
ISBN: 978-989-758-571-5; ISSN: 2184-500X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
37
called Continuously Operating Reference Station
(CORS), and managed by a network software
installed in a control centre. The introduction of the
CORSs has allowed users to collect data using one
GNSS multi-frequency receiver (instead of two). This
is possible thanks to the direct connection between
the CORS and the dual-frequency receiver through
the control centre. Today, a dense world network of
permanent stations to process GNSS data exists (Kim,
Seo and Lee, 2014), and it has revolutionised the data
acquisition modalities (Grejner-Brzezinska et al.,
2007; Rizos, 2007).
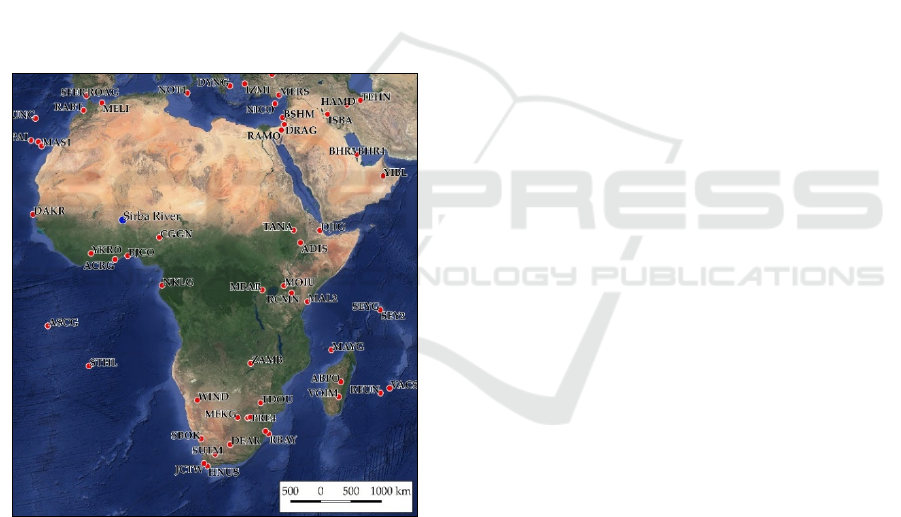
Despite today CORSs cover most of the world's
countries, some areas are still not included in the
network, such as some sub-Saharan countries (Figure
1). Considering the real-time positioning and the
NRTK method, the rover receiver needs to be within
a short distance (less than 60 km) from the reference
stations (Dabove and Manzino, 2014; Dabove, Cina
and Manzino, 2018).
Figure 1: CORS in Africa. The red dots indicate the stations
that provide observations to the International GNSS Service
(IGS), while the blue one is the study area. Data Source:
International GNSS Service (IGS), (https://www.igs.org/).
A short baseline is fundamental to minimise the
distance-dependent errors induced by the
troposphere, the ionosphere, and the orbital errors
(El-Mowafy, 2012, p. ). This specific requirement can
be an obstacle for realising NRTK surveys where
there are no CORS within hundreds of kilometres
(Elmezayen and El-Rabbany, 2019). A possibility to
overcome the lack of CORS is resorting to two GNSS
dual-frequency receivers in the rover-base modality.
This data collection method requires two GNSS
receivers communicating with each other (usually via
radio): one works as "base" or "master" (substituting
the permanent station) and the other as "rover" that
collects the coordinates of the points of interest for
the survey. The coordinates of the base station must
be known.
When a known-coordinates point is not available,
post-processing operations are compulsory to obtain
the base's correct position. One of the most common
post-processing methods is the PPP (Precise Point
Positioning). To perform it, data regarding satellites'
orbits and the ionosphere are needed to process the
pseudo-range and carrier phase measures of GNSS
multi-frequency receivers (Zumberge et al., 1997;
Kouba and Héroux, 2001; Bisnath and Gao, 2009).
These data are collected by permanent stations that
can also be located very far from the surveyed area
(Kouba and Héroux, 2001). In terms of East, North,
and Up components, the PPP can provide centimetre-
level precisions in static mode (Bisnath, Wells and
Dodd, 2003; Pan et al., 2015), if the phase
ambiguities are correctly fixed as integer values (Ge
et al., 2008; Collins and Bisnath, 2011). The PPP
corrections precision is also strictly dependent on the
measurement session's duration (Yigit et al., 2014;
Mohammed et al., 2018). Its effectiveness for the
estimation of the positions has been demonstrated by
several authors, e.g. (Zumberge et al., 1997; Kouba
and Héroux, 2001; Gao and Shen, 2002; Gao, Harima
and Shen, 2003) using precise orbits and satellite
clocks from IGS (Gao and Chen, 2004; IGS, 2019)
and many other providers (Jamieson Marian and
Gillins Daniel T., 2018; Mohammed et al., 2018;
Wang et al., 2018). RTK is a relative positioning
technique based on carrier-phase. A minimum of four
common satellites between the two receivers is
required. Tracking more than four satellites improves
the GPS position solution's precision and allows it to
obtain a sub-centimetre accuracy level. The excellent
accuracy results are also because errors and bias
deriving from the same satellite should be equals.
Thus, shorter is the baseline, and more similar are the
errors. Several error sources affecting positioning
accuracy in GNSS surveys exist (Karaim, Elsheikh
and Noureldin, 2018). Today relative technique
provides better solutions than the PPP technique in
terms of accuracy (Ocalan et al., 2016). The primary
reason is attributable to the lower effects of satellite
orbit errors over relative techniques than the PPP
technique.
Moreover, clock errors can be eliminated in
relative techniques using double differencing phase
GISTAM 2022 - 8th International Conference on Geographical Information Systems Theory, Applications and Management
38

measurements (Nistor and Buda, 2015). The primary
error sources of PPP (such as ionospheric and
tropospheric delay, clock bias) are usually mitigated
by: i) employing the combinations of dual-frequency
GNSS measurements to eliminate the first-order
ionospheric delay (Kouba and Héroux, 2001; Ocalan
et al., 2016); ii) applying external error correction
data (including satellite orbit and clock corrections);
and iii) modelling the tropospheric delay to correct it.
Since a part of tropospheric delay cannot be
efficiently modelled because of its high variability, it
is estimated (wet component of tropospheric delay).
Precise satellite orbit and clock information are used
to estimate the tropospheric residuals, and associated
gradients with proper stochastic models, which means
that the estimates are constrained by the prior
variance and its propagation value. Thus, PPP
depends on the accuracy level of this information
(Ocalan et al., 2016).
Even if RTK and PPP techniques provide similar
precision and accuracy, they require different setups.
On the one hand, RTK needs a complex configuration
and (generally) expensive equipment, but it rapidly
provides higher accuracy. It is worth remembering
that the base station must be placed very precisely on
a known-coordinate point to achieve high accuracy.
On the other hand, the PPP technique needs a more
straightforward setup, but it has lower accuracy and
longer initial convergence time (Nistor and Buda,
2015; Ocalan et al., 2016). Also, since PPP does not
use a base station, it is not affected by baseline length
bias and can provide full accuracy anywhere in the
world.
Until some years ago, the satellites' data, the
ionosphere information, and the specific software
necessary to perform PPP were not easily obtainable,
and the PPP was limited to few expert users, such as
academia and research institutes. Today, some
commercial and scientific solutions to perform PPP
exist (e.g., Bernese, GIPSY, and GAMIT). Such
software can efficiently perform PPP as long as
infrastructures with adequate computational power,
and skilled users are available. The PPP technique has
raised the attention of academia, industry, and
governments (Bisnath and Gao, 2009). In particular,
the last ones have dedicated specific attention to PPP,
and some of them shared the socio-economic benefits
of PPP with the public, providing ad hoc coordinates
online estimation services (Bisnath and Gao, 2009).
1
ANADIA 2.0 (Adaptation to climate change, disaster
prevention and agricultural development for food
security) is a project funded by the Italian Agency for
Development Cooperation (AICS) and executed by
Institute of BioEconomy of the National Research
Some governmental research centres provide PPP
online free services. It is sufficient to upload the
GNSS raw data to obtain correct position data from
the services. These free web-solutions for PPP do not
require high computational power or particularly
skilled users, but each service uses its estimation
algorithms. Thus, the results provided can be very
different. The scientific literature provides some
interesting analysis of PPP online services, where
known coordinates points are processed with
different PPP online services (Ozgur Uygur et al.,
2016; Arabi and Nankali, 2017; Oluyori, Ono and
Okiemute, 2019), and the estimated coordinates are
compared with known ones. Nevertheless, few of
these studies analyse data collected in geodetic
disadvantaged areas as far as the authors know.
Indeed, the lack of CORS and known coordinates
points is quite a frequent condition in sub-Saharan
rural areas, strongly affecting topographic surveys.
This work proposes a comparison between two
PPP online free services to correct RTK data
collected through rover-base modality (i.e., static
mode) in low-density CORS areas. The PPP services
considered are the Canadian Spatial Reference
System Precise Point Positioning tool (CSRS-PPP)
and the Automatic Precise Positioning Service
(APPS). A CORS-based post-processing free service
is considered in the analysis as a non-PPP post-
processing online tool: the AUSPOS Online GPS
processing service (AUSPOS). The precision, the
convergence time (meant as the length of time
required to reach centimetre-level positional
solutions), and the structure and condition of the
services' use are analysed in this paper. The data used
for the comparison were collected in February 2018
along Sirba River (southwest Niger) in the framework
of the ANADIA 2.0 project
1
.
2 INVESTIGATED SITE AND
SURVEY
ANADIA 2.0 project was born in 2017 to develop an
early warning system against floods and strengthen
the local technicians' competencies on monitoring
and forecasting river floods (Massazza et al., 2019).
Indeed, in the last decades, Sahelian floods have
become a relevant issue due to the ongoing climatic
Council of Italy (IBE-CNR) in partnership with the
Department of Regional and Urban Studies and Planning
of the Politecnico di Torino (DIST) and the National
Directorate for Meteorology of Niger (DMN).
Comparison of Free and Open PPP Services for Master-base Positioning in Geodetic Disadvantaged Areas: Case Study along the Sirba
River in Sub-Saharan Africa
39
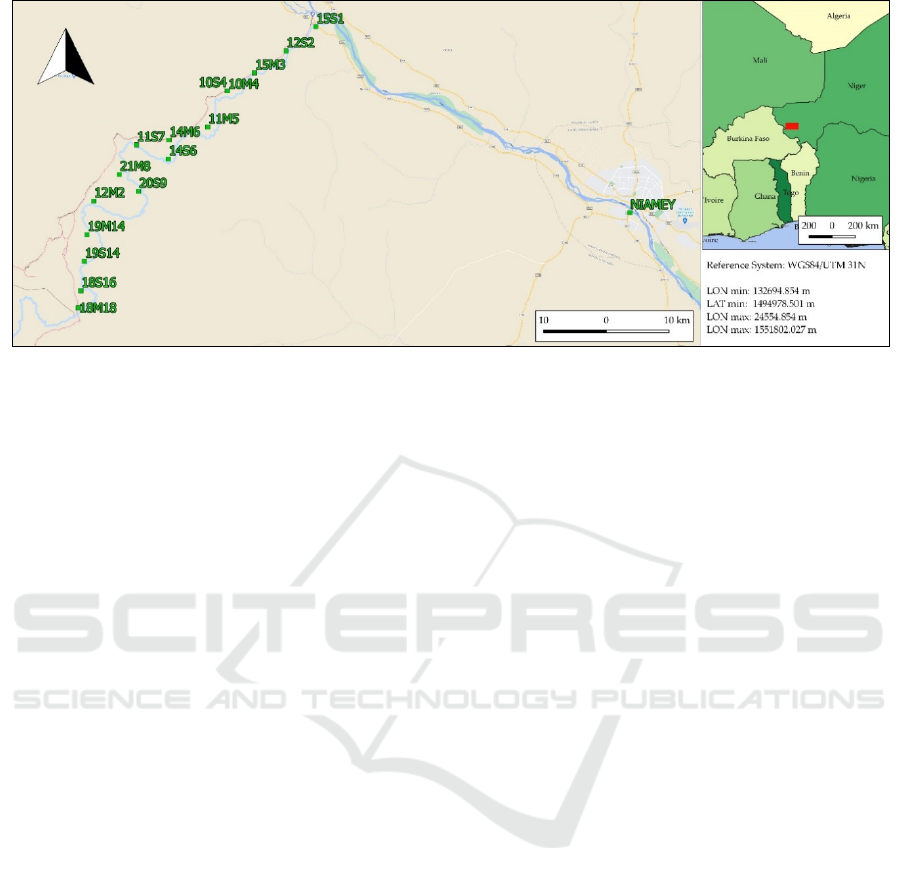
Figure 2: Section of Sirba River interested by the survey. The green squares identify the locations of the stations along the
river. The arrows indicate the flow direction of the rivers. OSM background.
and land use changes (Bigi, Pezzoli and Rosso, 2018;
Tamagnone et al., 2019). In this framework, high-
precision surface and hydraulic numerical models are
necessary as inputs for the development of forecasts
flood models (Massazza et al., 2020; Passerotti et al.,
2020; Tarchiani et al., 2020). Hence, to meet the
project's data requirements, a topographic survey was
carried out on the Middle Niger River Basin's main
tributary, the Sirba River (Figure 2). More than 100
cross-sections were measured along a reach of 108
km (one section per km), and flood-risked-exposed
infrastructures were measured during the dry period
(February) to take advantage of the intermittent flow
(Belcore et al., 2019; Tiepolo et al., 2019). 10 cm
accuracy for the Up component was required
(Massazza et al., 2019).
Despite the closest CORS to the study area are in
Nigeria and Ivory Coast, they are more than 900 km
away from the study region.
As discussed in the previous section, 900 km is a
too large baseline to guarantee centimetre-accuracy.
Besides, the closest known-coordinates points are
around 200 km away from the surveyed area.
Considering these particular conditions, the only
feasible way to collect data was an RTK survey in
master-rover modality with a radio-modem
connection. The PPP technique was used to post-
process the data and to estimate the coordinates of the
base stations. The data were collected with two
STONEX S10 dual-frequency receivers. The master
receiver was placed in 17 different stations along the
Sirba River (Figure 2), and 3,150 points were
measured with the rover receiver. Each master station
acquired data for at least two hours, considering a
session length of 3 hours and 22 minutes as
maximum. GPS, GLONASS, BEIDOU and SBAS
constellations were tracked.
Some instruments malfunctioning, attributed to
the high temperature, slowed down the data
collection. In the hottest hours of the day, the
temperature reached 40°C, and the master receiver
often overheated and stopped the communication
with the rover receiver. The communication
happened via radio using RTCM communication
protocol at 410-470 MHz frequency. The overheating
prevented acquisition longer than 3 hours for most of
the acquisition station. The receivers' communication
was even more limited by the local topography and
the abundant vegetation along the river. Regularly, if
the receivers were more than 3 km away from each
other, the communication stopped. In 9 days, were
measured 103 cross-sections along a river reach of
108 km. The raw measurements were saved in the
Receiver Independent Exchange Format (RINEX)
3.01 version with a sampling rate of 1s.
3 METHODOLOGIES
As previously discussed, two main possible
techniques are available for post-processing
purposes: the phase-based relative solution (base-
rover) or the PPP one (Dabove and Manzino, 2014).
In this paper, we will focus on the PPP approach (Cai
and Gao, 2007). Today many possibilities for
obtaining PPP solutions from online services exist
(Dawidowicz and Krzan, 2014; Dabove, Piras and
Jonah, no date): some of them consider only GPS
constellation (e.g., APPS), other ones also the
GLONASS satellites (CSRS-PPP). To exploit the use
GISTAM 2022 - 8th International Conference on Geographical Information Systems Theory, Applications and Management
40
of more than two GNSS constellations, the data
collected by the master receiver were stored in
RINEX 3.01 version and then post-processed using
two online PPP free services: 1) The Canadian Spatial
Reference System (CSRS-PPP), and 2) the Automatic
Precise Positioning Service of the Global Differential
GPS System (APPS). Additionally, data were
processed using a relative positioning online service,
3) Online GPS Processing Service (AUSPOS), as a
comparison against PPP technique geodetic
disadvantaged areas. A summed table was created
(Table 1) to recap the functioning of the three
services.
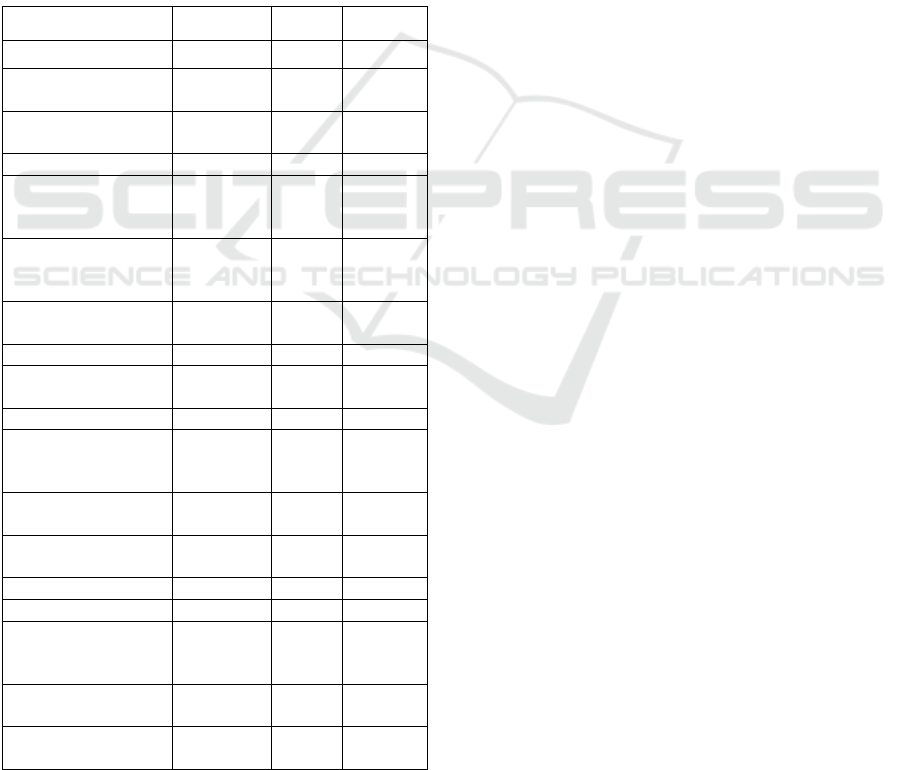
Table 1: Summary of the main characteristics of the three
services at the processing time, calculated on 10Mb file. *If
users submit RINEX V3 file, C2S (code measurement) and
L2S (phase measurement) from L2 frequency will NOT be
accepted.
CSRS-PPP APPS AUSPOS
RINEX version 3.x 2.x 2.11*
Maximum file size 300 Mb 10 Mb
Not
s
p
ecifie
d
Multi-file upload Yes Yes
Only via
FTP
FTP No Yes Yes
Height of the
antenna
Automatica
lly detected
Automa
tically
detecte
d
Manually
set
User-defined
elevation-dependent
data weighte
d
No Yes No
User-defined cut-off
an
g
le
No (default
7.5
)
Yes No
L1 code Yes Yes No
Upload of pressure
model
No Yes No
Direct results No Yes No
Compulsory
registration to the
website
Yes No No
Processing time
(
minutes
)
*
20 3 20
Reference system(s)
of the results
ITRF 2014,
NAD83
ITRF
2014
ITRF
2014
Orthometric hei
g
hts Yes No Yes
Elaboration re
p
ort Yes No Yes
Graphic restitution
of the elaboration
statistics
Yes No Yes
Ambiguity
resolution
No Yes Yes
GNSS constellations
p
rocesse
d
GPS+GL
ONASS
GPS GPS
4 RESULTS AND DISCUSSION
Before the PPP processing, the RINEX data were pre-
processed. The RINEX files version 3 were converted
into RINEX version 2.11 with the RTKCONV tool
that is part of the open source software RTKLIB
(http://www.rtklib.com/) (Takasu and Yasuda, 2009).
Furthermore, the frequency rate of acquisition was
reduced to one observation every 5 seconds to have
files of less than 10 Mb of size, which is the file size
limit of APPS service. The analysis considers the
precisions of the estimation of each service and the
relative accuracy (measured as the difference
between coordinates) of 17 stations (one station of
ANADIA 2.0 was excluded from this analysis
because it is located outside the Sirba River basin).
The final coordinates have been converted into
WGS84/UTM31N coordinates system. The APPS
service provides the σ values with 68% confidence,
while CSRS-PPP and AUSPOS calculates 95%
uncertainties. Therefore, the uncertainty values of
APPS were related to 2σ confidence. Table 2 shows
the session length and the date of acquisition for each
station. For the analysis, the stations were distributed
in three groups of uniform acquisition length: group
1 less than 2,5 hours acquisition length; group 2
between 2,5 and 3 hours; and group 3 more than 3
hours. The CSRS-PPP values had been taken as a
reference for comparing the services, as shown in
Equations 1 and 2.
ΔCSRS-APPS = EC_ CSRS - EC_APPS
(1)
ΔCSRS-AUSPOS = EC_CSRS – EC_AUSPOS
(2)
Where EC_ CSRS are the North, East and Ellipsoidal
height coordinates of each sample points estimated by
CSRS; EC_ APPS are the North, East and Ellipsoidal
height coordinates of each sample points estimated by
APPS; EC_ AUSPOS are the North, East and
Ellipsoidal height coordinates of each sample point
estimated by AUSPOS.
According to (Choy, Bisnath and Rizos, 2017), a
minimum of one hour is required for the horizontal
solution from a standard PPP static processing to
converge to 5 cm, and approximately 20 minutes are
required for 95% of solutions to reach a horizontal
accuracy of 20 cm (Seepersad and Bisnath, 2014).
Thus, three different scenarios of time acquisition
were created using RTKLIBCONV (Takasu and
Yasuda, 2009) to investigate the effectiveness of the
services on short acquisition time: full acquisition
length, session of one hour, session of half-hour.
Comparison of Free and Open PPP Services for Master-base Positioning in Geodetic Disadvantaged Areas: Case Study along the Sirba
River in Sub-Saharan Africa
41
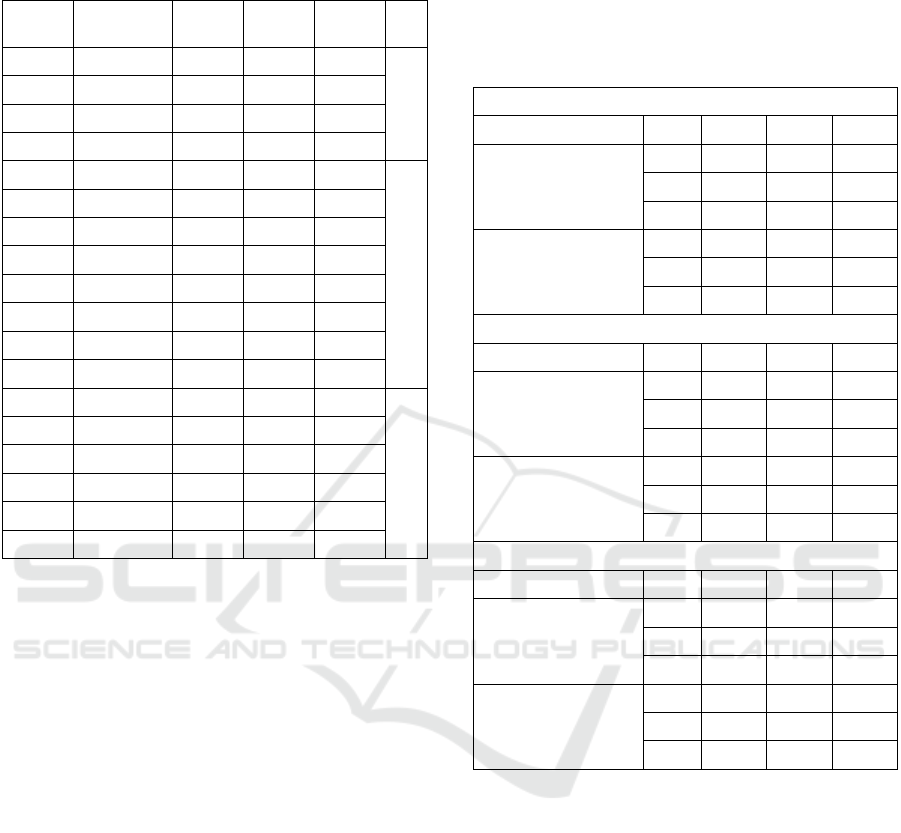
Table 2: Characteristics of the positions of the master
receivers (Stations) analysed. Gr =group, *dd/mm/yyyy.
Station
ID
Date of
acquisition*
Starting
time
Ending
time
Session
length
Gr
12S2 12/02/2018 12:58 14:49 01:51
1
10S4 10/02/2018 15:08 17:07 01:59
14M6 14/02/2018 09:28 11:43 02:15
10M4 10/02/2018 10:28 12:54 02:26
15S1 15/02/2018 13:46 16:30 02:44
2
19S14 19/01/2018 14:02 16:49 02:47
20S9 20/01/2018 14:24 17:12 02:48
15M3 15/01/2018 08:17 11:08 02:51
18S16 18/01/2018 14:09 17:02 02:53
21M8 21/01/2018 08:53 11:46 02:53
14S6 14/01/2018 13:38 16:35 02:57
11M5 11/01/2018 09:05 12:05 03:00
11S7 11/01/2018 13:43 16:52 03:09
3
12M2 12/01/2018 08:50 12:05 03:15
18M18 18/01/2018 08:05 11:28 03:23
20M12 20/01/2018 08:45 12:09 03:24
19M14 19/01/2018 08:25 11:52 03:27
12S2 12/02/2018 12:58 14:49 01:51
Table 3 presents the minimum, maximum and
average values of Δ CSRS-APPS and ΔCSRS-
AUSPOS, calculated as illustrated in equations 1 and
2. The difference between CSRS and AUSPOS of the
East component ranges between 0 cm and 6.7 cm,
which is a clue of high data dispersion. This is
particularly evident from distances between the
average values of Groups 1 and 2, and it is a clear
indicator of the importance of stationing time longer
than 1 hour for improved precision. On the contrary,
the North component of the Δ CSRS-AUSPOS (and
the Δ CSRS-APPS too) is more stable.
Regarding the coordinates' precision, the
calculated uncertainties values range from 0.2 cm
(East and North of APPS) to 65 cm (Up component
of AUSPOS). The latter is not representative of the
analysis, and it was interpreted as an exceptional
event; thus, it was excluded in the computation of the
average. For AUSPOS, the distance from the
reference CORS plays a crucial role in estimating the
coordinate. In these analyses, the baseline ranges
from 500 km to 1500 km on 14 reference stations.
From the reference literature, we aspect Root Mean
Square (RMS) values of position errors for baseline
around 500 km less than 4 cm, and less than 6 cm on
each component (E, N, U) for baseline more than
1000 km. Such values are calculated over 24 hours of
acquisitions (Choi, Roh and Lee, 2014). For shorter
stationing time, the precisions fall down.
Table 3: Minimum, Maximum, and Average of the
differences between the coordinates estimated by CSRS,
APPS, and AUSPOS for each station in meters.
Grou
p
1
Min Max Av
Δ
CSRS-APPS
East 0.007 0.019 0.014
North 0.008 0.014 0.011
Up 0.005 0.046 0.024
Δ
CSRS-AUSPOS
East 0.005 0.067 0.023
North 0.001 0.014 0.007
Up 0.018 0.046 0.032
Group 2
Min Max Av
Δ
CSRS-APPS
East 0.001 0.026 0.01
North 0.002 0.011 0.006
U
p
0.006 0.037 0.016
Δ
CSRS-AUSPOS
East 0.001 0.013 0.008
North 0.002 0.005 0.003
U
p
0.006 0.069 0.029
Group 3
Min Max Av
Δ
CSRS-APPS
East 0.003 0.029 0.016
North 0.001 0.008 0.003
Up 0.001 0.024 0.011
Δ
CSRS-AUSPOS
East 0.000 0.04 0.021
North 0.002 0.004 0.003
Up 0.006 0.031 0.017
According to the report produced by Novatel
(NovAtel, 2019), we can expect around 10 cm RMS
values of the position errors for baseline length
between 700 km and 1000 km in 3-hours stationing.
These values reflect our measures: AUSPOS is closed
8 cm on the Up component. For groups 1 and 2, the
uncertainties on the East component estimated by
APPS are slightly lower than those of other services
(Figure 3). Figure 3 shows the graphical analysis of
East, North, and Up components' uncertainties values
and considers the full acquisition time and on 1-hour
acquisition time both. Similarly to Table 3, what
stands out in Figure 3 is the decrease of uncertainties
from Full-time acquisition (Group 3) and one hour
sessions (Group 1). CSRS-PPP and APPS provide the
lowest uncertainties values. With shorter acquisition
time, the confidence levels of CSRS-PPP and APPS
GISTAM 2022 - 8th International Conference on Geographical Information Systems Theory, Applications and Management
42
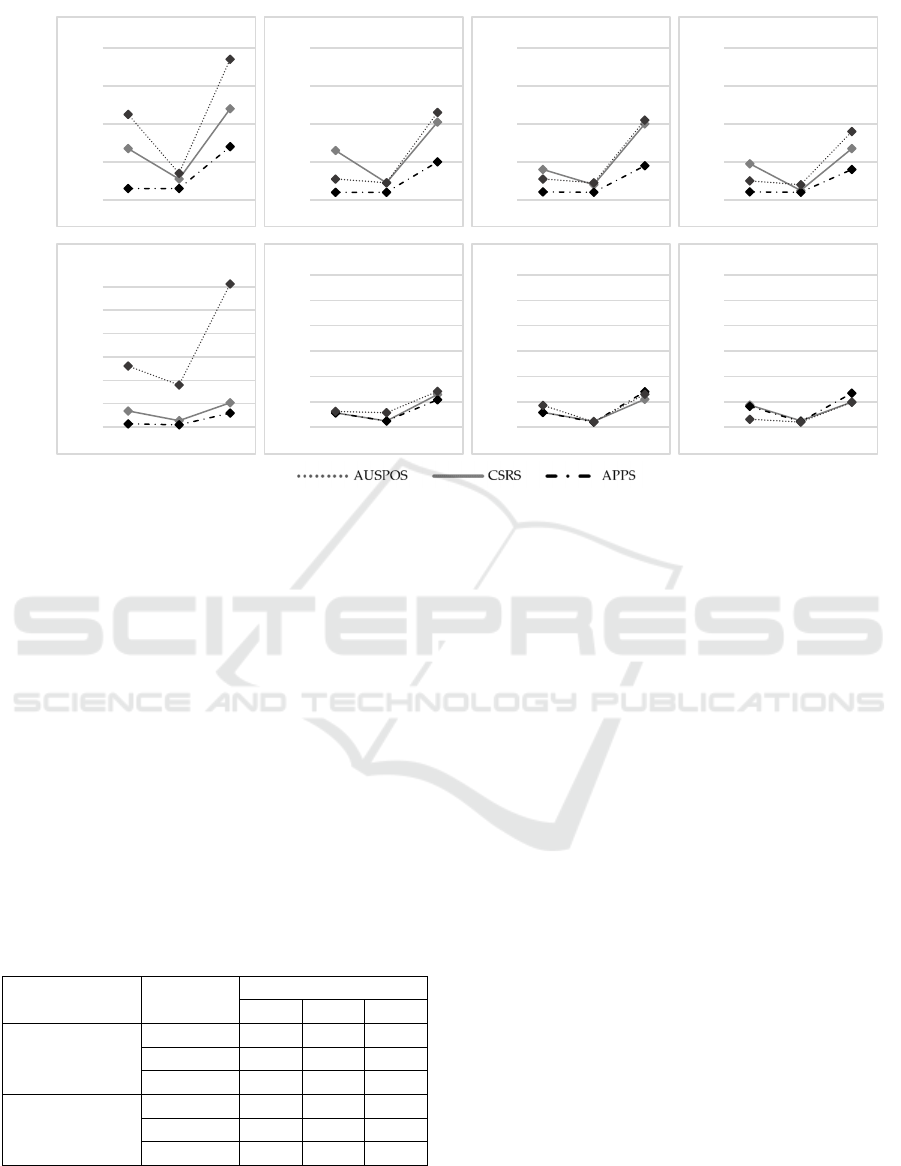
Figure 3: Graphical analysis of the uncertainties values of East, North, and Up coordinates of the three services, obtained
considering the full acquisition time and 1-hour acquisition time.
get closer (Figure 3), while AUSPOS shows similar
trends for some stations (i.e., 19M14 and 18M18) and
very different for other (station 12S2). Table 4 lists
the values of the difference between the coordinates
elaborated with the services on the 1-hour session.
Even if these trends are similar to full-acquisitions, a
significant distance between the Up components can
be observed: the ΔCSRS-APPS peaks 40 cm. For 30
minutes-acquisition time, AUSPOS did not provide
any results because one hour is the minimum
acquisition time required to perform the coordinates
estimations.
Table 4: Minimum, Maximum, and Average of the
difference between the coordinates estimated by CSRS,
APPS, and AUSPOS for each sample station (1hour
session).
Service ITRF
1 h session Δ (m)
Min Max Av
Δ
CSRS-APPS
East 0.001 0.140 0.030
North 0.000 0.374 0.032
Up 0.005 0.108 0.044
Δ
CSRS-AUSPOS
East 0.006 0.432 0.099
North 0.002 0.403 0.037
Up 0.033 0.286 0.165
CSRS-PPP and APPS's performances peak in the East
component of 20 cm and reach 50 cm on the Up
component.
5 DATA VALIDATION
The lack of CORS in Niger makes it challenging to
test the accuracy of PPP services. Since there are no
known-coordinates points to be used as a reference
for accuracy analysis, only the precision values can
be evaluated. To overcome this major constraint, we
analysed accuracies of post-processing services
solutions in sub-Saharan areas considering the data of
CORS settled in countries close to Niger. CORS at
the same latitude of the study area sought to guarantee
both the mean atmospheric conditions (in terms of
ionospheric and tropospheric delays) and satellite
geometry distribution. Another possible approach
could be to collect 24-hours of data to obtain results
independent of the satellite geometry distribution and
guarantee the solution's convergence, as described in
the literature (Li and Zhang, 2014; Ren et al., 2015).
However, it was impossible to realise long-session
sessions due to weather conditions. Hence, to check
the estimations' accuracy, raw-observations of a
CORS close to the surveyed area were analysed with
online services. The selected CORS was the YKRO
station (Yamoussoukro Tracking Station) in Cote
d'Ivoire (1000 km away from the study area) and part
of the IGS network (Table 5).
Full time session
1 hour session
0
0,02
0,04
0,06
0,08
EAST NORTH UP
2 SIGMA (m)
Station 12S2
0
0,02
0,04
0,06
0,08
EAST NORTH UP
2 SIGMA (m)
Station 20S9
0
0,02
0,04
0,06
0,08
EAST NORTH UP
2 SIGMA (m)
Station 19M14
0
0,02
0,04
0,06
0,08
EAST NORTH UP
2 SIGMA (m)
Station 18M18
0,00
0,10
0,20
0,30
0,40
0,50
0,60
EAST NORTH UP
2 SIGMA (m)
Station 12S2
0,00
0,10
0,20
0,30
0,40
0,50
0,60
EAST NORTH UP
2 SIGMA (m)
Station 20S9
0,00
0,10
0,20
0,30
0,40
0,50
0,60
EAST NORTH UP
2 SIGMA (m)
Station 19M14
0,00
0,10
0,20
0,30
0,40
0,50
0,60
EAST NORTH UP
2 SIGMA (m)
Station 18M18
Comparison of Free and Open PPP Services for Master-base Positioning in Geodetic Disadvantaged Areas: Case Study along the Sirba
River in Sub-Saharan Africa
43
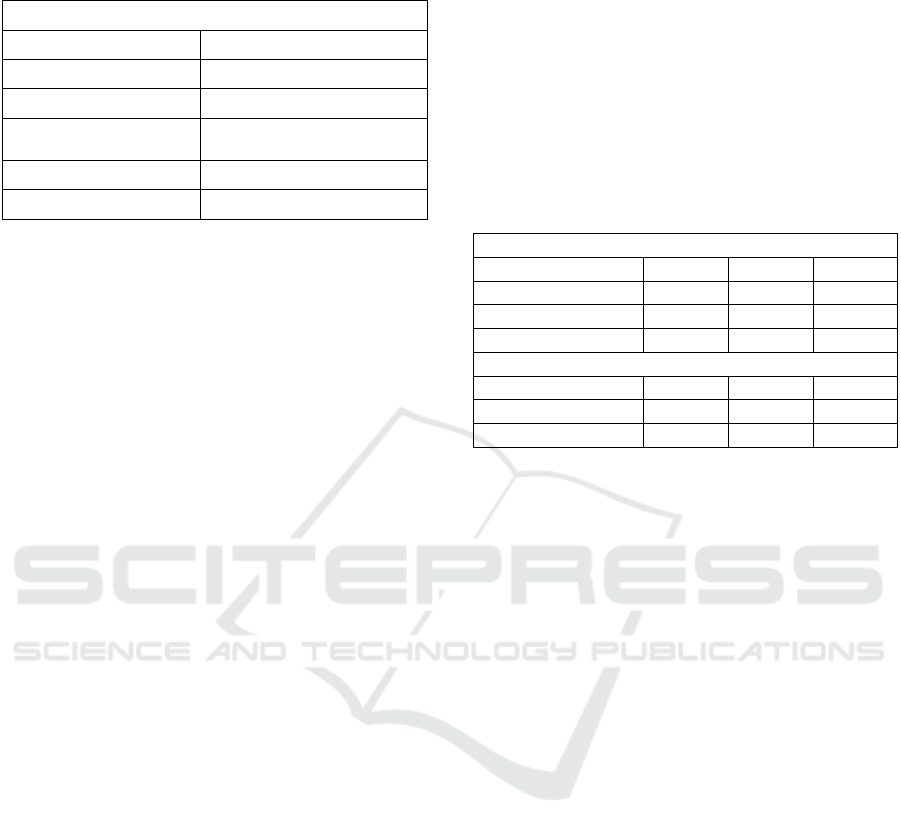
Table 5: Main characteristics of YKRO. Source: IGS
website.
YKRO Site Information
City Yamoussoukro
Country Cote d'Ivoire
Tectonic Plate African Plate
Approximate Position,
DMS
(
ITRF
)
LAT: +06°52' 14.0170"
LON: -05°14' 24.3347"
Elevation ellipsoid (m) 270.263
Date Installed 18-07-1999
This station was chosen because it is the closest
station (considering latitude) to the investigated area,
and it was operative at the time of the survey,
February 2018. Besides, it is away from the sea. This
may ensure atmosphere conditions as similar as
possible to the ones of the study area. YKRO data of
the survey days and the daily observations (12
th
of
each month of 2018) were downloaded from the IGS
website. The YKRO dataset was reduced to 3 hours-
lasting RINEX from 14.00 to 17.00, as the average
lasting and representative time for Sirba River
acquisitions. Data were processed with the online free
services and estimated coordinated compared to the
reference ones of the YKRO CORS (Table 5). The
results show relatively constant performances for the
North component and more disperse results for the
East and Up components. Figure 4 compares
summary statistics (average, minimum and maximum
values) for the differences calculated between real
and estimated coordinates. The highest dispersion of
the East component stands out in the graphs. CSRS
and APPS have similar trends on the components,
while AUSPOS, even if it has average values close to
one of the PPP, provided very unstable results for the
Up and East components. The results are never below
the 10 cm on East and North components while
reaching 1 cm on the Up component. According to the
literature, we should obtain precision under 20 cm on
horizontal components in 20 minutes. In our case,
CSRS-PPP did not provide results under 20 cm in a
half-hour on the East component. For example, in 30
minutes of session length, we reach the average
precision of 0.247 cm on the East component. The
results expected for one-hour sessions are
approximately 5 cm on horizontal components. APPS
fits well these general rules on East and North
components, while CSRS only focuses on the North
component.
The coefficients of determination (R
2
, listed in
Table 6) confirm these observations. They verify that
the estimated East component is the closest to the
three services' reference values, reaching 0.737 for
the CSRS-PPP service. AUSPOS records the most
disperse results in the Up component. In parallel, the
Root Mean Square Error (RMSE) calculated over
each service's estimations' position errors provides a
view of the accuracy. The East component presents
the highest values, followed by the North
components. The lowest-RMSE service is the APPS
for Up component.
Table 6: R
2
and RMSE values for the 2018 monthly dataset
of solutions provided by the analysed services.
R
2
Online Service East North Up
CSRS 0.235 0.737 0.273
AUSPOS 0.070 0.292 0.017
APPS 0.253 0.391 0.104
RMSE (m)
CSRS 0.220 0.193 0.016
AUSPOS 0.221 0.192 0.040
APPS 0.223 0.193 0.015
Regarding YKRO analysis, even if remarkable
differences between the coefficients of determination
are present, the RMSE values differ for no more than
0.2 centimetres in North and East components. The
estimated height above the ellipsoid by APPS is the
closest to the YKRO reference, only 1 mm on average
values from CSRS-PPP. It is worth mentioning that
AUSPOS does not use YKRO for the ambiguity
resolution, but it relies on stations that are placed
approximately 500-2000 km far from YKRO.
CSRS-PPP and APPS use different ephemerids.
This may affect the estimated coordinates because
they strongly affect PPP results, thus in the case of
very different products, we might have different
results. Besides this, the ephemerids seem not to
interfere in the estimations. Additional considerations
in terms of efficiency on the PPP online free services
can be addressed. APPS is the most rapid service in
terms of data processing, and it permits the analysis
of the large quantity of data (industrial application)
uploading the RINEX files on an FTP provided by
JPL (not tested in this contribute). APPS results are
provided directly from the website after a few
seconds (depending on the data size), while AUSPOS
and CSRS send the results via email. Nevertheless,
APPS has an interface that may look complicated for
non-GIPSY-expert users, and it does not provide the
results in a report. CSRS-PPP is very functional
because the upload process is intuitive, and the results
report is easily interpretable.
GISTAM 2022 - 8th International Conference on Geographical Information Systems Theory, Applications and Management
44

Figure 4: Average (square), Minimum and Maximum values of the difference between the coordinates estimated by online
post-processing services and the real coordinates. Average, minimum, and maximum are calculated for AUSPOS (a), CSRS
(b), and APPS (c).
6 CONCLUSIONS
The present work aimed to assess PPP online services'
quality as free solutions for topography surveys in
critical areas, based on a real case study's
performances. According to the analysis we
performed in the Niger area, the online PPP services
are adequate and useful for the post-processing
corrections of the master-rover RTK survey. The
relative accuracy analysis of the services results in
closer estimations of coordinates between CSRS-PPP
and APPS. CSRS-PPP guarantees satisfying
performances and provides steady results also for
short sessions. As expected, the relative positioning
technique (performed by AUSPOS) provides the least
precise results due to the study area's geodetic
remoteness. Besides this, AUSPOS performance is
quite good, considering the analysis's baseline length
is never below 500 km. These considerations,
confirmed by the one-year YKRO analysis, underline
the PPP technique's excellent reliability in areas
outside the CORS network. It is worth underlining
that it was impossible to perform a complete and
exhaustive statistical analysis since the available
dataset is relatively poor. Moreover, the lack of
known-coordinates points and session's impossibility
for more than 3 hours prevented a proper accuracy
analysis of PPP services by real framework
comparison. The difficulty of data gathering is part of
the criticality of the study area.
Even if the estimated coordinates of YKRO
CORS showed poor accurate results, they were
acceptable for the ANADIA 2.0 project, which
needed at least 10 cm precision on the Up component.
In the framework of the project, the Canadian CSRS-
PPP was used, which, although it is less precise than
APPS, provides detailed statistics regarding the
coordinates' corrections and is user-friendly. The
cross-sections measured were elaborated and
interpolated in a Digital Terrain Model used for the
high-precision hydraulic numerical model. Nigerien
technicians of the ministerial office in charge of
meteorology and water resources have actively
participated in the field surveys, appreciating the
RTK master-rover survey's potential and the PPP
online services. Furthermore, the 18 known and
correct coordinate stations used for surveying could
be the basis for a future local framework. In
conclusion, the PPP has proved to be an effective,
efficient, and economical solution to realise precision
surveys in critical areas such as sub-Saharan ones.
ACKNOWLEDGEMENTS
A special thanks to the National Directorate for
Meteorology of Niger (DMN) and the Directorate for
Hydrology of Niger (DH) for the precious work
realised for the survey. The authors would like to
thank Vieri Tarchiani (IBE-CNR) and Maurizio
Tiepolo (POLITO-DIST) for supporting field
activities during the project.
REFERENCES
Arabi, M. and Nankali, H.R. (2017) ‘Accuracy Assessment
of Online PPP Services in Static Positioning and Zenith
Tropospheric Delay (ZTD) Estimation’, Geospatial
Engineering Journal, 8(3), pp. 59–69. Available at:
0,00
0,05
0,10
0,15
0,20
0,25
0,30
East North Up
a) CSRS-PPP
0,00
0,05
0,10
0,15
0,20
0,25
0,30
East North Up
b) APPS
0,00
0,05
0,10
0,15
0,20
0,25
0,30
East North Up
c) AUSPOS
Comparison of Free and Open PPP Services for Master-base Positioning in Geodetic Disadvantaged Areas: Case Study along the Sirba
River in Sub-Saharan Africa
45

http://gej.issge.ir/article-1-198-en.html (Accessed: 27
February 2020).
Belcore, E. et al. (2019) ‘Raspberry Pi 3 multispectral low-
cost sensor for UAV-based remote sensing. Case study
in south-west Niger’, ISPRS - International Archives of
the Photogrammetry, Remote Sensing and Spatial
Information Sciences, XLII-2/W13, pp. 207–214.
doi:10.5194/isprs-archives-XLII-2-W13-207-2019.
Bigi, V., Pezzoli, A. and Rosso, M. (2018) ‘Past and Future
Precipitation Trend Analysis for the City of Niamey
(Niger): An Overview’, Climate, 6(3), p. 73.
doi:10.3390/cli6030073.
Bisnath, S. and Gao, Y. (2009) ‘Current State of Precise
Point Positioning and Future Prospects and
Limitations’, in Sideris, M.G. (ed.) Observing our
Changing Earth. Berlin, Heidelberg: Springer
(International Association of Geodesy Symposia), pp.
615–623. doi:10.1007/978-3-540-85426-5_71.
Bisnath, S., Wells, D. and Dodd, D. (2003) ‘Evaluation of
Commercial Carrier-Phase-Based WADGPS Services
for Marine Applications’, in. Proceedings of the 16th
International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GPS/GNSS
2003), pp. 17–27. Available at: http://www.ion.org/pu
blications/abstract.cfm?jp=p&articleID=5178 (Access
ed: 2 February 2021).
Cai, C. and Gao, Y. (2007) ‘Precise Point Positioning Using
Combined GPS and GLONASS Observations’, Journal
of Global Positioning Systems, 6(1), pp. 13–22.
doi:10.5081/jgps.6.1.13.
Choi, B.-K., Roh, K.-M. and Lee, S.J. (2014) ‘Long
Baseline GPS RTK with Estimating Tropospheric
Delays’, Journal of Positioning, Navigation, and
Timing, 3(3), pp. 123–129. doi:10.11003/JPNT.
2014.3.3.123.
Choy, S., Bisnath, S. and Rizos, C. (2017) ‘Uncovering
common misconceptions in GNSS Precise Point
Positioning and its future prospect’, GPS Solutions,
21(1), pp. 13–22. doi:10.1007/s10291-016-0545-x.
Collins, P. and Bisnath, S. (2011) ‘Issues in Ambiguity
Resolution for Precise Point Positioning’, in.
Proceedings of the 24th International Technical
Meeting of the Satellite Division of The Institute of
Navigation (ION GNSS 2011), pp. 679–687. Available
at: http://www.ion.org/publications/abstract.cfm?jp=p
&articleID=9628 (Accessed: 2 February 2021).
Dabove, P., Cina, A. and Manzino, A.M. (2018) ‘Single-
Frequency Receivers as Permanent Stations in GNSS
Networks: Precision and Accuracy of Positioning in
Mixed Networks’, in Cefalo, R., Zieliński, J.B., and
Barbarella, M. (eds) New Advanced GNSS and 3D
Spatial Techniques. Cham: Springer International
Publishing (Lecture Notes in Geoinformation and
Cartography), pp. 101–109. doi:10.1007/978-3-319-
56218-6_8.
Dabove, P. and Manzino, A.M. (2014) ‘GPS & GLONASS
Mass-Market Receivers: Positioning Performances and
Peculiarities’, Sensors, 14(12), pp. 22159–22179.
doi:10.3390/s141222159.
Dabove, P., Piras, M. and Jonah, K.N. (no date) ‘Statistical
comparison of PPP solution obtained by online post-
processing services’, 2016 IEEE/ION Position,
Location and Navigation Symposium (PLANS)
[Preprint]. Available at: https://www.academia.edu/
25487168/Statistical_comparison_of_PPP_solution_o
btained_by_Online_Post-Processing_Services_30_PU
BLICATIONS_45_CITATIONS_SEE_PROFILE_Sta
tistical_comparison_of_PPP_solution_obtained_by_O
nline_Post-Processing_Services (Accessed: 4
September 2019).
Dawidowicz, K. and Krzan, G. (2014) ‘Coordinate
estimation accuracy of static precise point positioning
using on-line PPP service, a case study’, Acta
Geodaetica et Geophysica, 49(1), pp. 37–55.
doi:10.1007/s40328-013-0038-0.
Elmezayen, A. and El-Rabbany, A. (2019) ‘Precise Point
Positioning Using World’s First Dual-Frequency
GPS/GALILEO Smartphone’, Sensors, 19(11), p.
2593. doi:10.3390/s19112593.
El-Mowafy, A. (2012) ‘Precise Real-Time Positioning
Using Network RTK’, Global Navigation Satellite
Systems: Signal, Theory and Applications [Preprint].
doi:10.5772/29502.
Eren Kamil et al. (2009) ‘Results from a Comprehensive
Global Navigation Satellite System Test in the CORS-
TR Network: Case Study’, Journal of Surveying
Engineering, 135(1), pp. 10–18. doi:10.1061/(ASCE)
0733-9453(2009)135:1(10).
Gao, Y. and Chen, K. (2004) ‘Performance Analysis of
Precise Point Positioning Using Rea-Time Orbit and
Clock Products’, Positioning, 1(8), pp. 0–0. Available
at: http://www.scirp.org/Journal/Paperabs.aspx?paper
id=253 (Accessed: 4 September 2019).
Gao, Y., Harima, K. and Shen, X. (2003) ‘Real-Time
Kinematic Positioning Based on Un-differenced carrier
Phase Data Processing’, in Proceedings of the 2003
National Technical Meeting of The Institute of
Navigation. National Technical Meeting of The
Institute of Navigation, Anaheim, CA, pp. 362–368.
Available at: https://www.ion.org/publications/abstract
.cfm?articleID=3779 (Accessed: 4 September 2019).
Gao, Y. and Shen, X. (2002) ‘A New Method for Carrier-
Phase-Based Precise Point Positioning’, Navigation,
49(2), pp. 109–116. doi:10.1002/j.2161-4296.2002
.tb00260.x.
Ge, M. et al. (2008) ‘Resolution of GPS carrier-phase
ambiguities in Precise Point Positioning (PPP) with
daily observations’, Journal of Geodesy, 82(7), pp.
389–399. doi:10.1007/s00190-007-0187-4.
Grejner-Brzezinska, D.A. et al. (2007) ‘Efficiency and
Reliability of Ambiguity Resolution in Network-Based
Real-Time Kinematic GPS’, Journal of Surveying
Engineering, 133(2), pp. 56–65. doi:10.1061/
(ASCE)0733-9453(2007)133:2(56).
IGS (2019) IGS Network. Available at: http://www
.igs.org/network (Accessed: 4 September 2019).
Jamieson Marian and Gillins Daniel T. (2018)
‘Comparative Analysis of Online Static GNSS
Postprocessing Services’, Journal of Surveying
GISTAM 2022 - 8th International Conference on Geographical Information Systems Theory, Applications and Management
46

Engineering, 144(4), p. 05018002. doi:10.1061/
(ASCE)SU.1943-5428.0000256.
Karaim, M., Elsheikh, M. and Noureldin, A. (2018) ‘GNSS
Error Sources’, Multifunctional Operation and
Application of GPS [Preprint]. doi:10.5772
/intechopen.75493.
Kim, M., Seo, J. and Lee, J. (2014) ‘A Comprehensive
Method for GNSS Data Quality Determination to
Improve Ionospheric Data Analysis’, Sensors, 14(8),
pp. 14971–14993. doi:10.3390/s140814971.
Kouba, J. and Héroux, P. (2001) ‘Precise Point Positioning
Using IGS Orbit and Clock Products’, GPS Solutions,
5(2), pp. 12–28. doi:10.1007/PL00012883.
Li, P. and Zhang, X. (2014) ‘Integrating GPS and
GLONASS to accelerate convergence and initialization
times of precise point positioning’, GPS Solutions,
18(3), pp. 461–471. doi:10.1007/s10291-013-0345-5.
Massazza, G. et al. (2019) ‘Flood Hazard Scenarios of the
Sirba River (Niger): Evaluation of the Hazard
Thresholds and Flooding Areas’, Water, 11(5), p. 1018.
doi:10.3390/w11051018.
Massazza, G. et al. (2020) ‘Downscaling Regional
Hydrological Forecast for Operational Use in Local
Early Warning: HYPE Models in the Sirba River’,
Water, 12(12), p. 3504. doi:10.3390/w12123504.
Mohammed, J. et al. (2018) ‘An Assessment of the Precise
Products on Static Precise Point Positioning using
Multi-Constellation GNSS’, in. 2018 IEEE/ION
Position, Location and Navigation Symposium
(PLANS), pp. 634–641. Available at: http://www.ion.
org/publications/abstract.cfm?jp=p&articleID=15820 (
Accessed: 2 February 2021).
Nistor, S. and Buda, A.S. (2015) ‘Ambiguity Resolution In
Precise Point Positioning Technique: A Case Study’,
Journal of Applied Engineering Sciences, 5(1), pp. 53–
60. doi:10.1515/jaes-2015-0007.
NovAtel (2019) Resolving Errors, NovAtel. Available at:
https://www.novatel.com/an-introduction-to-gnss/chap
ter-5-resolving-errors/ (Accessed: 12 November 2019).
Ocalan, T. et al. (2016) ‘Accuracy Investigation of PPP
Method Versus Relative Positioning Using Different
Satellite Ephemerides Products Near/Under Forest
Environment’, Earth Sciences Research Journal, 20(4),
pp. D1–D9. doi:10.15446/esrj.v20n4.59496.
Oluyori, P.D., Ono, M.N. and Okiemute, E.S. (2019)
Comparisonof OPUS, CSRS-PPP and MagicGNSS
Online Post-processing Software of DGPS
Observations for Geometric Geoid Modelling in FCT,
Abuja. SSRN Scholarly Paper ID 3373295. Rochester,
NY: Social Science Research Network. Available at:
https://papers.ssrn.com/abstract=3373295 (Accessed:
27 February 2020).
Ozgur Uygur, S. et al. (2016) ‘Accuracy Assessment for
PPP by Comparing Various Online PPP Service
Solutions with Bernese 5.2 Network Solution’, 18, pp.
EPSC2016-7102. Available at: http://adsabs.harvard.
edu/abs/2016EGUGA..18.7102O (Accessed: 27
February 2020).
Pan, S. et al. (2015) ‘Real-Time PPP Based on the Coupling
Estimation of Clock Bias and Orbit Error with
Broadcast Ephemeris’, Sensors, 15(7), pp. 17808–
17826. doi:10.3390/s150717808.
Passerotti, G. et al. (2020) ‘Hydrological Model
Application in the Sirba River: Early Warning System
and GloFAS Improvements’, Water, 12(3), p. 620.
doi:10.3390/w12030620.
Ren, X. et al. (2015) ‘Multi-constellation GNSS precise
point positioning using GPS, GLONASS and BeiDou
in Australia’, in. International Global Navigation
Satellite Systems (IGNSS) Symposium, International
Global Navigation Satellite Systems Society, pp. 1–13.
Available at: https://researchbank.rmit.edu.au/view/r
mit:35729 (Accessed: 4 September 2019).
Rizos, C. (2007) ‘Alternatives to current GPS-RTK
services and some implications for CORS infrastructure
and operations’, GPS Solutions, 3(11), pp. 151–158.
doi:10.1007/s10291-007-0056-x.
Seepersad, G. and Bisnath, S. (2014) ‘Challenges in
Assessing PPP Performance’, Journal of Applied
Geodesy, 8(3), pp. 205–222. doi:10.1515/jag-2014-
0008.
Takasu, T. and Yasuda, A. (2009) ‘Development of the
low-cost RTK-GPS receiver with an open source
program package RTKLIB’, International symposium
on GPS/GNSS, 1, p. 6.
Tamagnone, P. et al. (2019) ‘Hydrology of the Sirba River:
Updating and Analysis of Discharge Time Series’,
Water, 11(1), p. 156. doi:10.3390/w11010156.
Tarchiani, V. et al. (2020) ‘Community and Impact Based
Early Warning System for Flood Risk Preparedness:
The Experience of the Sirba River in Niger’,
Sustainability, 12(5), p. 1802. doi:10.3390/su120
51802.
Tiepolo, M. et al. (2019) ‘Flood Assessment for Risk-
Informed Planning along the Sirba River, Niger’,
Sustainability, 11(15), p. 4003. doi:10.3390/su1115
4003.
Wang, L. et al. (2018) ‘Validation and Assessment of
Multi-GNSS Real-Time Precise Point Positioning in
Simulated Kinematic Mode Using IGS Real-Time
Service’, Remote Sensing, 10(2), p. 337. doi:10.
3390/rs10020337.
Yigit, C.O. et al. (2014) ‘Performance evaluation of short
to long term GPS, GLONASS and GPS/GLONASS
post-processed PPP’, Survey Review, 46(336), pp. 155–
166. doi:10.1179/1752270613Y.0000000068.
Zumberge, J.F. et al. (1997) ‘Precise point positioning for
the efficient and robust analysis of GPS data from large
networks’, Journal of Geophysical Research: Solid
Earth, 102(B3), pp. 5005–5017. doi:10.1029
/96JB03860.
Comparison of Free and Open PPP Services for Master-base Positioning in Geodetic Disadvantaged Areas: Case Study along the Sirba
River in Sub-Saharan Africa
47
