
Traffic Light Control using Reinforcement Learning: A Survey and an
Open Source Implementation
Ciprian Paduraru, Miruna Paduraru and Alin Stefanescu
Department of Computer Science, University of Bucharest, Romania
Keywords:
Reinforcement Learning, Agent, Traffic Light Control, Optimization, Open-source Tool, Execution
Management.
Abstract:
Traffic light control optimization is nowadays an important part of a smart city, given the advancement of
sensors, IoT, and edge computing capabilities. The optimization method targeted by our work follows a
general trend in the community: dynamically switching traffic light phases depending on the current traffic
state. Reinforcement learning was lately adopted in the literature as it has been shown to outperform previous
methods. The primary goal of our work is to provide an overview of the state of the art of reinforcement
methods for traffic signal control optimization. Another topic of our work is to improve over existing tools
that combine the field of reinforcement learning with traffic flow optimization. In this sense, we seek to add
more output capabilities to existing tools to get closer to the domain-specific problem, to evaluate different
algorithms for training strategies, to compare their performance and efficiency, and to simplify efforts in the
research process by providing ways to more easily capture and work with new data sets.
1 INTRODUCTION
A smart city is defined by the European Commission
as a place where networks and public services are ef-
ficiently harnessed through communication and infor-
mation technologies for the benefit of its citizens and
businesses (European Commission, 2021). Its aim is
to create a region with sustainable economic growth
and to achieve high quality in the fields of economy,
mobility, environment, people, law, and administra-
tion. We focus our research investigations on the op-
timization of the traffic flow within a city through an
efficient management of the available traffic lights.
This type of optimization is usually done by dynami-
cally calibrating the timing of traffic signal phases at
connected intersections.
As the literature review shows, the latest trend in
solving this problem is through reinforcement learn-
ing (RL) methods. The main reasons for using RL
methods are the following: (a) The optimization prob-
lem can be first simulated and optimized in a simu-
lated environment until an optimal strategy for timing
the traffic light phases is found. (b) The current state
of the art in using RL methods outperforms previous
work (baseline methods), as shown in Section 2. (c)
The solution chosen for intelligent traffic light control
must be dynamic, making decisions over time that de-
pend on deep insight into the overall state of the city
or region being optimized.
Existing work in this area attempts to solve the
optimization problem at two different levels:
1. Microscopic Level - Considering the optimiza-
tion of individual vehicles (e.g., how long does
a vehicle wait at a traffic light), especially when
optimizing a single intersection or a series of con-
nected intersections.
2. Macroscopic Level - divides the physical space
of the city into streets, lanes, areas and aggregates
the metrics and data on large areas.
In general, microscopic-level optimizations are more
valuable and detailed, but at the cost of being harder
to train and converge than macroscopic ones.
The contributions of our paper are threefold:
1. An overview of the state of the art in reinforce-
ment learning methods, tools, and datasets avail-
able for experimentation. This section serves as
an introduction to the field for both research sides
mentioned above.
2. A comparison of state-of-the-art algorithms on a
real-world dataset using the RESCO benchmark
(Ault and Sharon, 2021).
3. A detailed architecture documentation and some
technical level improvements over the existing
Paduraru, C., Paduraru, M. and Stefanescu, A.
Traffic Light Control using Reinforcement Learning: A Survey and an Open Source Implementation.
DOI: 10.5220/0011040300003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 69-79
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
69

state-of-the-art tool (Alegre, 2019), which already
combines the field of reinforcement learning with
traffic flow optimization. The purpose of the im-
provements is to further facilitate the experimen-
tation processes.
The implementation is open source and avail-
able on GitHub at https://github.com/unibuc-cs/
TrafficFlowOptimization.
Moreover, the novelties at the level of the frame-
work itself are the following:
• A detailed discussion of the first microscopic-
level open-source existing tool SUMO-RL (Ale-
gre, 2019), on which our experiments and our
further improvements are based. This helps the
reader with a fully documented solution that has
the potential to be more quickly understood and
further extended by the community. Overall, the
reuse of the previous tool provides a code-level
separation between the methods for optimization
and the traffic management concepts and their
technical depth. See Section 3 for more details.
• An expanded list of RL libraries to be used by
the community with examples of common new
frameworks such as TFAgents (Guadarrama et al.,
2018), PFRL (Fujita et al., 2021), or distributed
training with RLlib (Liang et al., 2018). Multiple
workers and environments per worker variants are
supported in the distributed training setup.
• Plotting functions built on top of TensorBoard
(TensorBoard, 2021), specifically adapted for the
metrics of the traffic light control problem.
• A comprehensive list of output options with rele-
vant default metrics for real-world scenarios. The
user can easily add new metrics around our default
metrics.
The paper is structured as follows. Section 2 con-
tains a detailed overview of RL methods used for traf-
fic light control optimization and datasets or bench-
marks available for experimentation. Section 3 pro-
vides an architectural description of the state-of-the-
art RL tooling that can be used by the end user to
experiment with traffic flow optimization methods.
Evaluation is performed in Section 4. Finally, con-
clusions and future work are presented in Section 5.
2 STATE-OF-THE-ART SURVEY
The workflow used in the literature generally con-
sists of capturing portions of a real city with one or
more connected intersections, transferring the envi-
ronment and the captured real traffic data into a sim-
ulation environment, and then training algorithms to
find an optimal strategy for calibrating the traffic light
timing. The sub-methods used range from classi-
cal Q-learning methods to policy gradients (PG) with
actor-critic to natural gradients (NG). Real-world traf-
fic data is collected using sensors, video cameras, or
statistical data on the population, its traffic patterns,
lane density over time, etc. A summary of these meth-
ods can be found in (Project SUMBA, 2020).
If traffic data is not available or not sufficient for
a city, there are some methods in the literature that
can be used to simulate and optimize strategies based
on realistic data. The Four-Step model described in
(Ort
´
uzar and Willumsen, 2011) and (Button and Hen-
sher, 2007) is one of the most common methods to
replicate real traffic flow along routes in simulated en-
vironments. The method divides the area into traf-
fic analysis zones and then models the traffic flow
considering the possible activities in the area (e.g.,
schools, universities, business and commercial places,
etc.). Although it is used to simulate scenarios at the
macroscopic level, it can also be adapted at the mi-
croscopic level by first generating probability distri-
butions, from which the behavior is then retrieved for
each individual vehicle. The Agent-Based Demand
(Project SUMBA, 2020), (Innes and Kouhy, 2011),
traffic generation is more suited to the microscopic
level by generating activities and trajectories for each
vehicle agent.
We divide this section into two parts. In the first
part, we present some previous work and attempts to
use open-source or commercial libraries that can be
used for experiments and how they compare to our
work. The second part is devoted to the state of the
art of algorithms used for traffic light control opti-
mization, focusing on reinforcement learning meth-
ods, which seems to be the latest trend in solving the
targeted optimization problem through our work.
2.1 Environment Simulation Tools
The base layer of any reinforcement learning algo-
rithm requires an environment in which it can oper-
ate. In our case study, a traffic simulator is needed
that replicates real traffic data or samples from an ap-
proximately real distribution. After a review of open
source tools, we concluded that SUMO (Krajzewicz
et al., 2012) is the most widely used and maintained
tool. Users can take advantage of its ability to replay
data, generate random traffic data, and it has an API
to interact with from different environments, as we
needed in our implementation. It also supports di-
rect import of real parts of urban infrastructure via
the OSM standard (OSRM, 2020) and ASAM (Asso-
ciation for Standardization of Automation and Mea-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
70

suring Systems, 2021) (note: the difference between
OSM and ASAM is that the roads in ASAM also have
a 3D topology, which allows for more realistic ex-
periments when cities do not necessarily have plain
ground). It also supports integration with CARLA
(Dosovitskiy et al., 2017) for 3D simulation and vi-
sualization. An alternative to SUMO was MatSim
(Horni et al., 2016). However, at the moment it seems
to be less maintained and provide less support than
our first choice.
2.2 Datasets
As for datasets, we considered datasets that can either
be used directly, i.e., provide data that can be used di-
rectly at the microscopic level, or that can be adapted
to our goal, i.e., contain data sources that can gen-
erate probabilities that can be sampled by the sim-
ulator at simulation time. Caltrans (California De-
partment of Transportation, 2021) collects data from
street-level sensors and induction loops. It is used
by the state of California to monitor traffic. The
dataset, which is publicly available online, provides
researchers with raw data collected from real traffic to
experiment with. Induction loop data is counted and
traffic density data is stored on local regional servers
every 30 seconds. The dataset is created using the
aggregated data from these local servers and is con-
stantly updated. The data can be imported into SUMO
simulator by connecting the locations of data sensors
on longitude and latitude with the urban infrastructure
obtained from OSM. A tool in our framework enables
this connection in a simple way for experiments. Al-
though originally intended for the macroscopic level,
we found that the data can be used to create distribu-
tion probabilities, which can then be retrieved at the
individual vehicle level to simulate a realistic traffic
scenario.
Datasets from (Horni et al., 2016) can be imported
into SUMO to replicate real-world traffic distribution
as well.
Bolt (BOLT, 2020) provides real traffic data di-
rectly at the micro and macro levels. At the micro
level, the data comes from each driver in a time se-
ries format where each entry includes a timestamp
(recorded at regular intervals of 2 seconds on aver-
age), location (latitude and longitude), vehicle orien-
tation, and acceleration. At the macro level, it pro-
vides information about the average speed on roads
and lanes reported at different times, linking the col-
lected data to real events and specific times of the
year, month and day. Information is also provided on
intersections and the distribution of routing in differ-
ent directions.
An open-source tool for benchmarking algorithms
and evaluating them against a real-world dataset col-
lected in Cologne (Germany) is described in RESCO
(Ault and Sharon, 2021). We use their dataset in
our evaluation. Although this work includes a set of
known algorithms and compares them to using the
dataset based on a custom implementation via the
PRFL library, the purpose of the work is to provide a
benchmark and a complex dataset rather than a toolkit
for experimentation with different methods and algo-
rithms. Our paper attempts to bridge this gap and
provides source code and tools to separate the techni-
cal aspects of controlling the simulation and datasets
from the reinforcement learning methods, state and
reward matching, algorithms for training, and manag-
ing their execution.
2.3 Reinforcement Learning Methods
for Traffic Light Control
The baseline controllers (following (Ault and Sharon,
2021)) used in general for evaluating against the RL
methods are the following:
1. Fixed-time control: where each phase of a traf-
fic signal at an intersection is activated for a fixed
duration and follows a fixed cycle.
2. Max-pressure control: where the phase combina-
tion with the maximal joint pressure is activated.
(Chen et al., 2020).
3. Greedy-control: where the phase combination
with the maximal joint queue length and the num-
ber of approaching vehicle count is activated first
(Chu et al., 2020)].
An important motivation for our work is that these
baseline methods are outperformed by most recent
work that uses RL as a method for finding dynamic
policies that optimize the process of switching traffic
light phases.
In this section, we review the state of the art of
methods that use reinforcement learning for the traf-
fic signal control optimization problem targeted by
our work, and present how the different methods can
be connected from theory to simulators and real traf-
fic scenarios. Due to space limitations, we first refer
readers new to the field of reinforcement learning to
(S. Sutton and G. Barto, 2018).
One of the first seminal works on optimizing traf-
fic with RL is (Wiering et al., 2004). The authors
model a set of interconnected intersections using a
graph G with two different types of nodes: (a) en-
try nodes - where vehicles enter according to certain
distributions, (b) nodes for each intersection equipped
Traffic Light Control using Reinforcement Learning: A Survey and an Open Source Implementation
71

with traffic lights. The created simulation environ-
ment considers as state per vehicle S = (P, D), where
P is the position of the vehicle, while D is the des-
tination point. For each individual, the shortest path
(with a 10% error) is considered. The reward for each
individual agent v at time t, R(v, t), is −1 if the car has
to wait at a traffic light, or 0 if it can proceed without
waiting. The total reward at time t is then the sum of
the rewards, R (t) =
∑
v∈AllVehicles(t)
R(v,t). In terms
of an RL problem, the optimization problem means
finding the optimal traffic light switching times such
that we minimize the waiting times of vehicles in G
over a given period of time, i.e., obtain a policy that
yields better rewards over time. The state of the RL
problem definition is the state of all traffic lights and
the number of vehicles waiting at each traffic light.
The actions in the environment represent the switch-
ing of the traffic lights between their different states,
i.e., two states - green and red. A tabular Q-learning
is used to evaluate the value of state and action transi-
tions: Q(s, a) =
∑
s
0
R(s
0
) + γV (s
0
), where V (s
0
) is the
known average value for state s
0
. These values are
determined and maintained during the episodic simu-
lation in the environment. The final result is a trained
strategy that performs actions according to the differ-
ent states.
Although the ideas in (Walraven et al., 2016) were
originally applied to the problem of relieving traffic
congestion on highways, they can also be applied to
optimize traffic flow in the cities, especially at the
entrances and exits of bridges or at the intersection
of major arterials with minor arterials. The work is
based on the idea of limiting the speed on certain sec-
tions to avoid congestion. It divides a highway into
N sections and considers the average speeds on each
section, v
i
and the density, k
i
on that section. The
main evaluation metric is the total travel time of ve-
hicles. Since the equations in the paper are specif-
ically designed for highways, we will only list the
main ideas and explain how we can adapt them for
the optimization case in a city. The authors describe
the problem as a Markov decision process and then
use Q-learning to optimize the mentioned metric. In
this system, the state at time t is mainly represented
by s
t
= {(v
i
, k
i
}), where i iterates on the space of all
sections of the road. The considered reward is 0 if the
minimum speed on all sections is higher than a de-
fined threshold u, negative otherwise, depending on
the waiting time of cars on all sections between two
consecutive time points t and t + 1, and a parameter c:
r
t
=
0 ifmin{v
i
((t + 1)c)
| i = 1, .. . , N > u},
−h(tc, (t + 1)c) otherwise
where
h(b, e) = T
∑
p
∑
N
i=1
[M
i
L
i
k
i
(p)] +
∑
N
i=0
w
i
(p)
,
and M
i
, L
i
, w
i
, p represents the number of sections,
lanes, segments, respectively. The number of vehicles
queued at each entry/exit of a road p. The actions are
represented by the speed limit intervals applied on the
sections to get the best rewards. The system is then
trained to estimate Q(condition, action) from real
data and find a greedy strategy that dynamically sets
the speed limits. Even if the speed limit condition is
practically impossible to achieve, it can be computed
the other way around in the case of a city: How could
we set the traffic lights to achieve this speed limit if
we assume that cars are traveling at the speed limit.
The work in (Lin et al., 2018) notes that previous
work is based only on local optimizations at intersec-
tions, and proposes an extension of the methods to
manage multiple intersections simultaneously. While
the proposed model is a toy in terms of experiments
since nine intersections are considered in a grid, the
work is very valuable in laying the foundations for the
use of Deep Reinforcement Learning in traffic signal
control optimization. The state space is modified so
that each intersection has sensors that collect 2 types
of information: the number of waiting vehicles and
the average speed of vehicles per direction. Since
there are at most 4 by 4 choices within an intersec-
tion, a state representing each intersection is a tuple
of the form (2,4,4). The action space consists of 4
phases representing the possible states of the traffic
light at an intersection (Fig. 1). The action of the traf-
fic light agent is then one that either moves the phase
from the current one to the next. Formally, the action
is a tuple of the form (N
T LS
, 2), where the first axis
has dimension N
T LS
, i.e., the number of traffic lights
in the region under consideration, and the second axis
has dimension 2, since it represents the probability of
either staying in the current state or moving to the next
one. Each phase is assumed to last at least 5 seconds,
and the transition between phases (yellow color state)
takes a fixed time of 3 seconds. We use these timings
in our work and consider them as default parameters
unless adjusted by the users. Following previous ex-
periments, the authors propose two types of rewards:
1. Local reward: measures the difference between
the maximum number of vehicles waiting at the
intersection from the NS (north-south) and WE
(west-east) directions at each traffic light i, Eq. 1.
r
TLS
i
t
= −
maxq
WE
t
− maxq
NS
t
(1)
2. Global reward: it measures the difference between
the number of vehicles that passed the traffic light
and the number of vehicles that were stopped at
all traffic lights at time t, Eq. 1.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
72
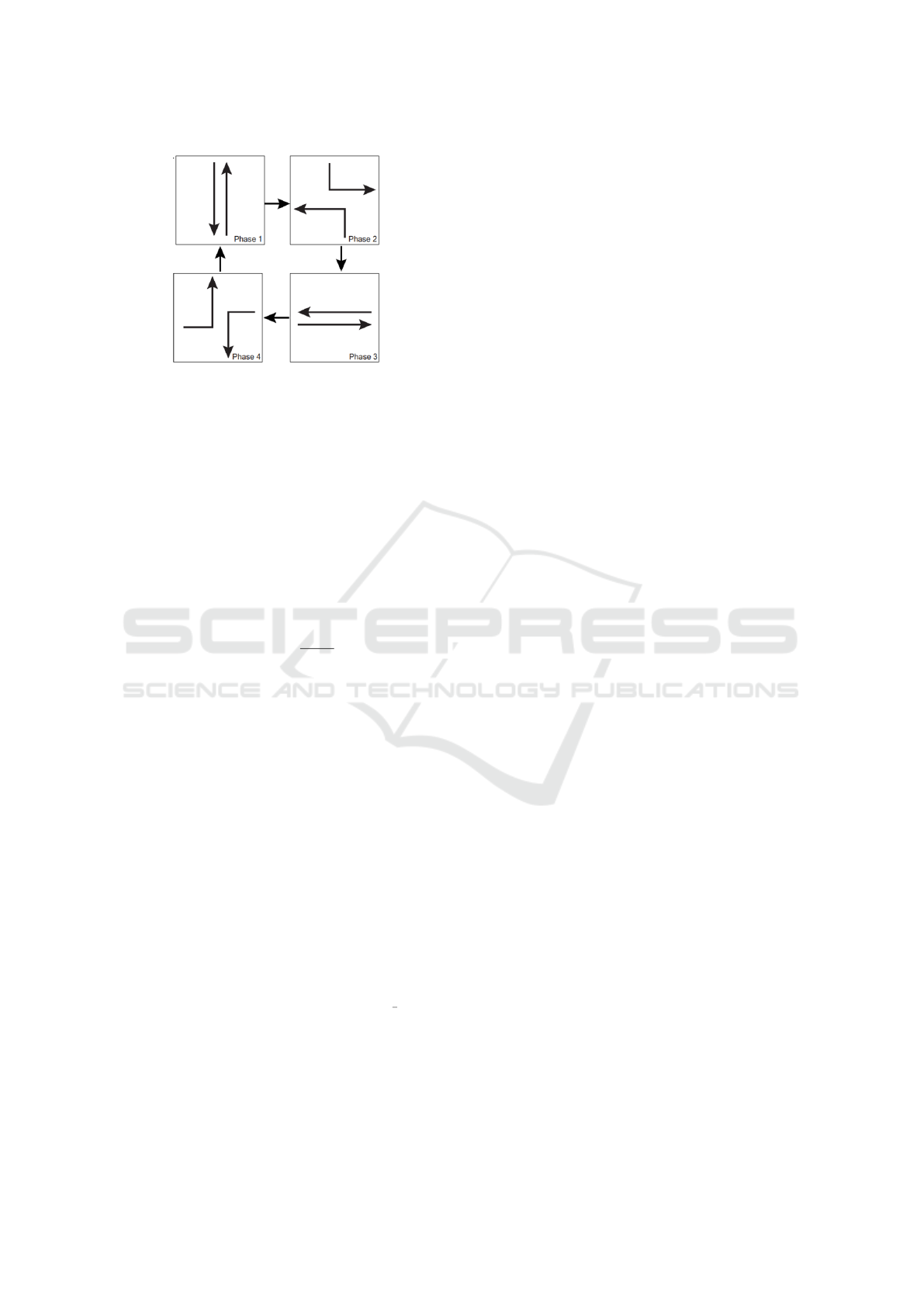
Figure 1: The four phases of a traffic light agent considered
in (Lin et al., 2018). The agent’s actions can either maintain
the phase or cycle from the current phase to the next.
r
Global
t
=
Veh
(out)
t
−
Veh
(in)
t
(2)
Your final reward is calculated as in Eq. 3 com-
bined, where β assumes a value of 0 at the beginning
of the training and increases to 1 with the success of
the training episode. Intuitively, local optimization on
each intersection is tried more at the beginning, then
we move on to optimizing the global state and coor-
dinating between different intersections.
r
t
= βr
Global
t
+ (1 −β)
1
N
TLS
N
TLS
∑
i
r
TLS
i
t
(3)
The actor-critic method is used, and PPO (Schul-
man et al., 2017) is chosen for training stability. A
novelty of the work is the use of deep meshes to map
the state of nine intersections in the city. Instead of
considering numerical values as in previous works,
the authors divide the region into a grid of size W x H
x C. Convolution, ResNet and fully connected layers
are used to map the state for the Actor and the Critic.
A similar solution is presented in (Casas, 2017), but
the author use DDPG (Lillicrap et al., 2016) instead
of PPO. However, we have not yet seen a solid com-
parison between the two methods.
Another novel approach to represent the state
space for a deep reinforcement learning solution is the
work presented in (Genders and Razavi, 2016). First,
they partition the traffic lanes into segments of maxi-
mum capacity for the discretization of physical space,
similar to the idea in (Walraven et al., 2016). For-
mally, the state space becomes: S ∈ (B × R)
1
c
×n
× P,
where: l is the length of a lane, c is the length of a
cell into which the cells have spatially partitioned the
space under consideration, n is the size of the physical
space (a grid); B is a boolean value indicating whether
or not there is a car at that location, R is the average
speed of the cars in that cell, and P is the phase un-
der consideration at that time. If we consider A as the
set of actions in the system (similar to Fig. 1), then
Pis ∈ B
|A|
. For training their methods, the authors use
A3C (Mnih et al., 2016) for efficient parallelization of
the experiments. This is something that we also con-
sider in our work and tools. We strongly believe that
high level parallelization of experiments is very im-
portant to get better policies in less time when com-
putational resources are readily available.
In (Wu et al., 2020), the authors make the tran-
sition to a multi-agent reinforcement learning system
where each traffic light intersection is a single agent.
They modify a version of the DDPG algorithm where
the strategies of the agents are synchronized between
each traffic light agent. The paper thus proposes a
transition from multi-objective learning (where the re-
ward was a single vector simulating multiple agents)
to a true multi-agent system. It is also mentioned that
the use of LSTM layers for both the Actor and the
Critic stabilizes the results, since the agents usually
have only partial access to environment observations.
The Deep Q-learning implementation is used in
many other works, but recently the implementation
in (Ault et al., 2020) has gained a lead of up to
19.4% over the other solutions using the same learn-
ing method. The novelty of their work is the repre-
sentation of the convolutional Q-network, which uses
features such as queue length, number of approaching
vehicles, total speed of approaching vehicles, and to-
tal waiting time. These are then aggregated into con-
volutional layers over the lanes that form the same ap-
proaching road. The reward formula used is (minus)
the total waiting time at the traffic light.
In (Chen et al., 2020), the authors introduce the
concept of pressure to coordinate multiple intersec-
tions. Pressure is defined as the difference between
the length of queues in the arriving lanes of an inter-
section and the length of queues in the receiving lane
of a downstream intersection. They use the FRAP
(Zheng et al., 2019) model and pressure as both a state
and a reward for a DQN agent distributed across all
intersections.
A novel topology and architecture is FMA2C
(Chu et al., 2020), which enables cooperation be-
tween signal control agents (one per intersection),
called workers, in a hierarchical topology. Neigh-
boring workers are coordinated by a local discounted
neighbor reward, discounted neighbor states, and
joint actions. Workers are the leaf of a hierarchical
network in which the leading agents are trained to
optimize traffic flow in their assigned region. The
higher-level goals of their leading agent are adopted
by the workers coordinated below them.
Traffic Light Control using Reinforcement Learning: A Survey and an Open Source Implementation
73
In the same domain, it is also worth noting how
Bolt (BOLT, 2020) uses a Markov model to estimate
the time it takes to get from an origin to a destination.
This uses the collected data (as explained in the pre-
vious section) and the standard routing engine OSRM
(OSRM, 2020) to find the shortest path between two
points on the globe.
In (Capasso et al., 2020), traffic behavior and op-
timization in roundabouts is studied. The authors use
reinforcement learning (A3C method) to provide op-
timal strategies capable of negotiating between traffic
agents and increased aggressiveness when driving in
roundabouts. The integration of these cases is also on
our future work list. As for the deployment aspects of
research, the work in (D
´
ıaz et al., 2018) explores how
an IoT-based lighting system could perform data col-
lection and optimization. The authors simulate their
methods on the Raspberry Pi platform and PIR sen-
sors. In future work, we also plan to see how our
proposed reinforcement learning methods can benefit
from data collected by IoT systems in a smart city.
3 FRAMEWORK DESCRIPTION
This section describes in detail the SUMO-RL frame-
work (Alegre, 2019), which is the state-of-the-art tool
that connects the RL field with traffic flow optimiza-
tion, together with our additions as announced in Sec-
tion 1. The methods behind the framework are based
on Deep Reinforcement Learning. The end user can
extend it through functional hooks (documentation
is available on the repository address) from different
points to achieve: (a) optimization goals as rewards,
(b) observations - what information is available from
the city/traffic system and how it can be mapped in a
numerical format, (c) the algorithms chosen for train-
ing the traffic light agents, (d) the platform solution
for parallelizing and distributing the work when a
wide range of computational resources is available.
3.1 Single and Multi Agent RL Support
The SUMO-RL framework supports both single and
multi-agent modes. In single agent mode, a single
RL agent is created to control all traffic lights in a
given area. In multi-agent mode, there is a single
agent per traffic light that acts cooperatively as a zero-
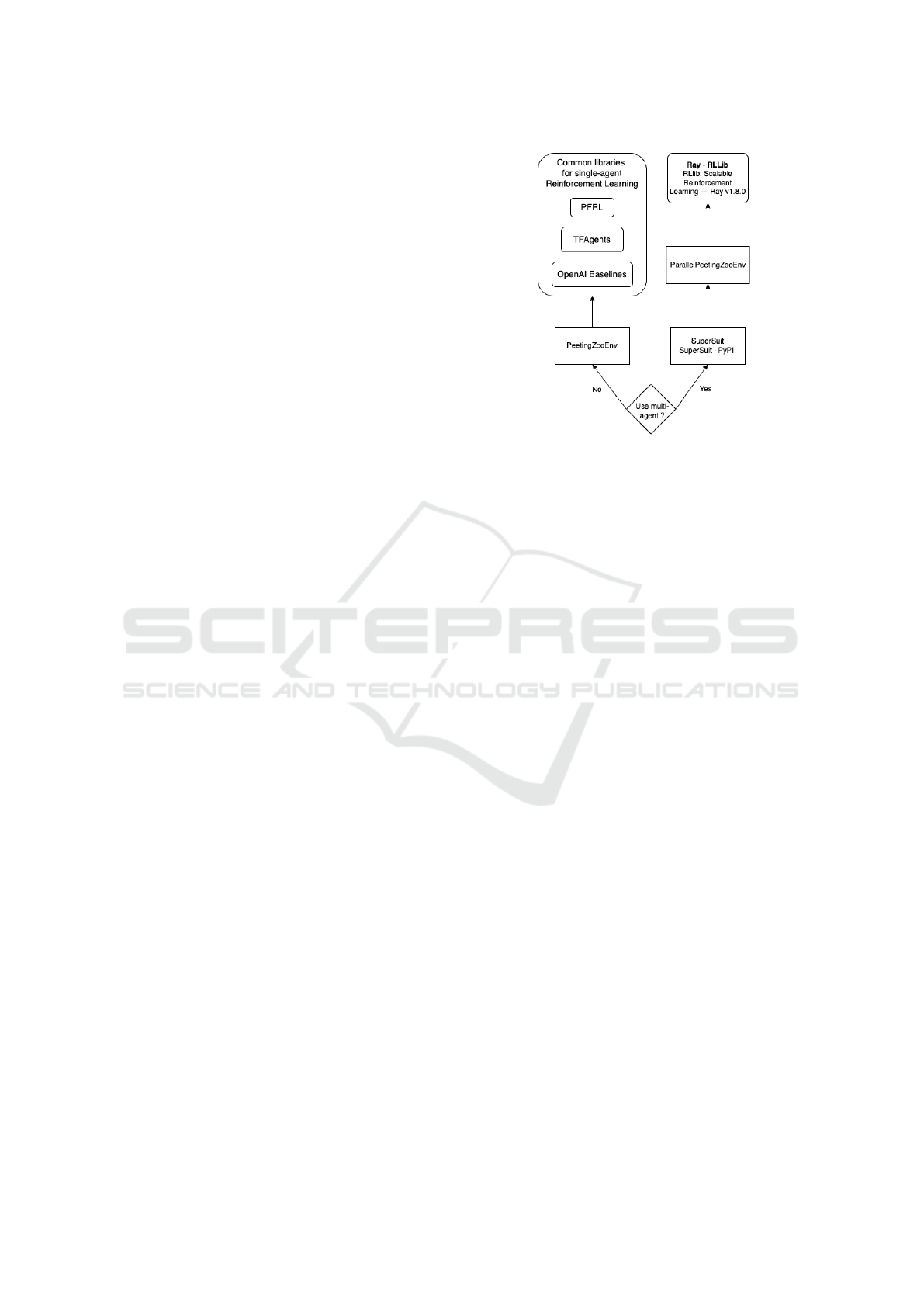
sum game as much as possible. Figure 2 shows the
software stack used within the framework for experi-
ments between single and multi-agent modes. In sin-
gle agent mode, the framework can leverage a number
of open source libraries to demonstrate its flexibility,
such as TFAgents (Guadarrama et al., 2018), PFRL
Figure 2: The software stack used in our framework to sup-
port single and multi-agent reinforcement learning.
(Fujita et al., 2021), OpenAI Baselines (Dhariwal
et al., 2017). To provide a similar abstraction for both
modes, we use the PeetingZoo library implementation
(Terry et al., 2020a). This allows the framework to
provide common OpenAI Gym interfaces (Brockman
et al., 2016) for both modes, as required by the RL
research community. In the case of multi-agent RL
mode, the machine learning algorithms also need pre-
processing operations such as normalizing the length
of actions and observations, since the number of lanes
may be different for each traffic light agent (inter-
section). For these operations, we use the Supersuit
(Terry et al., 2020b) package, which builds wrap-
pers on top of existing code to perform the required
preprocessing operations without changing the user’s
source code. We felt this was the best option avail-
able, as it allowed researchers to bring in their existing
RL source code more quickly for experimentation. At
the execution management level, we leverage the RL-
lib library (Liang et al., 2018), which contains a set
of implemented multi-agent algorithms out of the box
and a transparent parallelization execution paradigm,
to operate on high-performance computing infrastruc-
tures.
3.2 Environments Abstraction
The full structure of a shared environment using the
OpenAI Gym (Brockman et al., 2016) interface is
shown in Figure 3. The environment class is wrapped
around two decorators from the PeetingZoo library,
which in turn uses some of the preprocessing hooks
created with the SuperSuit tool: PadActions and
PadObservation - to populate the observation and ac-
tion spaces so that all agents have the same dimen-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
74
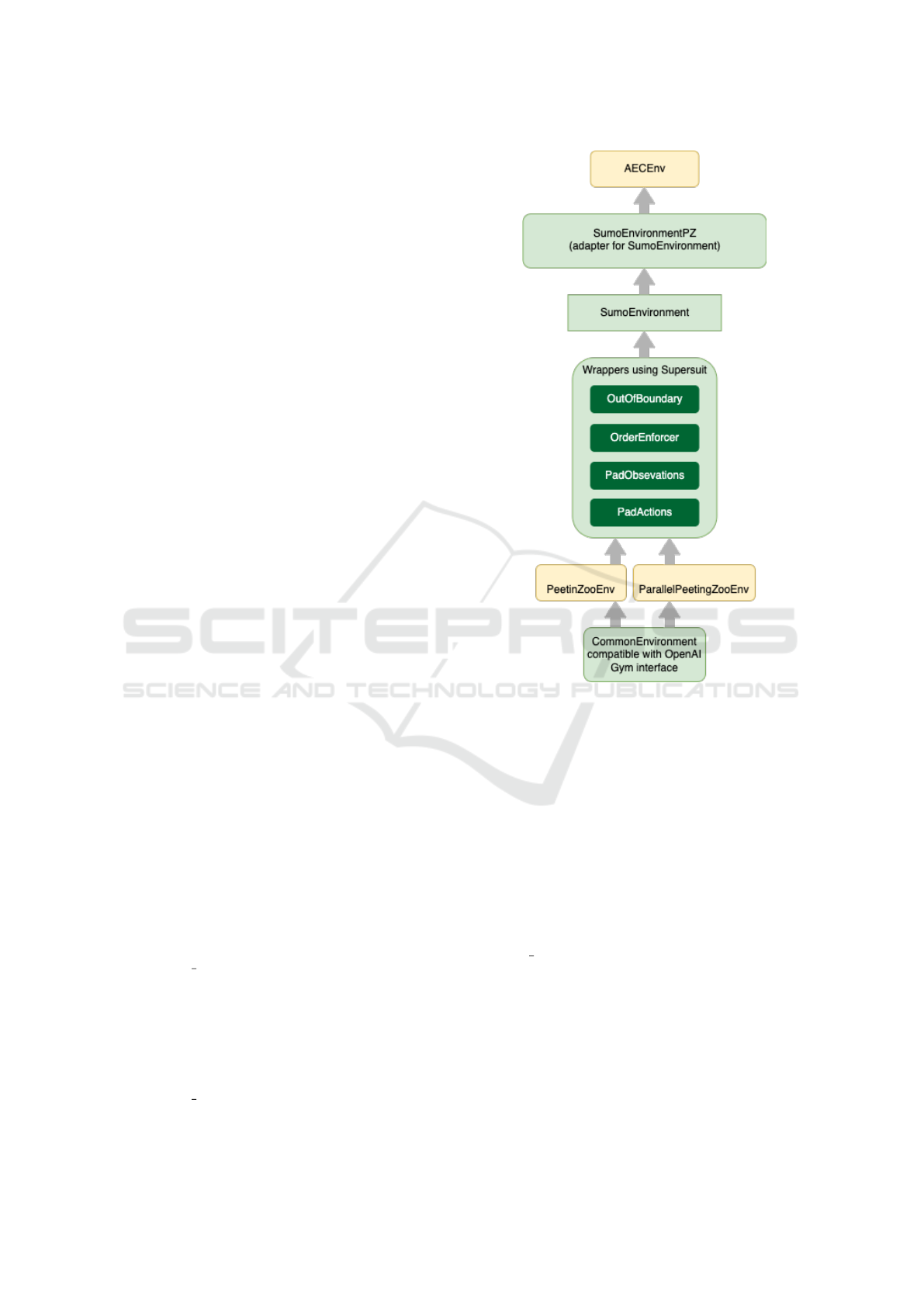
sionality, regardless of the number of lanes each traf-
fic light agent has, OrderEnforcer - to add an order
to the execution steps between synchronizing agents
(note that we support both asynchronous and syn-
chronous decision making in multi-agent mode; both
variants can be addressed in practice, as smart cities
can coordinate traffic lights to enforce an order for
switching traffic lights), OutOfBoundary - mecha-
nism for checking harmlessness to ensure that data
is read/written within correct bounds. The SumoEn-
vironmentPZ class serves as an adapter between the
base environment AECEnv, implemented in the Peet-
ingZoo library based on the Agent Environment Cy-
cle Game (Terry et al., 2021) idea, and the SumoEn-
vironment class. The difference between Peeting-
ZooEnv and ParallelPeetingZooEnv is that the for-
mer assumes that each agent knows what decision the
other agents have made at each step, and therefore
acts in a fixed order. The second uses the concept
of Partially Observable Stochastic Games (POSGs)
(Tom
´
asek et al., 2021), where the agent cannot see
what other agents have done in the current step, i.e.,
they act in parallel.
The core implementation of the environment class
resides in the SumoEnvironment class, which com-
municates with SUMO (Krajzewicz et al., 2012) to
manage the simulation. The full picture of this com-
ponent is shown in Figure 4. First, a scenario is pro-
cedurally loaded into the episode within the SUMO
simulator. The scenario contains a traffic infrastruc-
ture layout, which can be a real or a toy example
for experimentation, and the simulation data for the
trajectories of each vehicle, which comes either from
recorded real data sets or from fitted probability dis-
tributions from which samples are drawn. The second
step is to use the API provided by SUMO to retrieve
the information about the traffic light phases, the cur-
rent fixed times and the lane topology at the intersec-
tion. For each intersection, the SumoEnvironment in-
stance creates a TrafficLight object instance that con-
tains this information and manages it over time. There
are three important operations that can be overridden
by the user for their own experiments. SUMO-RL
provides out-of-the-box implementations for each of
them:
1. compute observation: this function retrieves
stored information about the state of each lane
at the intersection, current phase, timing infor-
mation, etc. from SUMO environment. The user
can override this to create convolution spaces, for
example. We also implement some of the latest
proven standard implementations as examples.
2. compute rewards: it returns the reward between
different time steps of an episode. The exam-
Figure 3: The layered architecture of OpenAI Gym compat-
ible interface (Brockman et al., 2016) for environments ab-
stracting both single and multi-agent execution modes. The
green colored boxes are implemented in SUMO-RL (Ale-
gre, 2019), the yellow ones are from the PeetingZoo library
(Terry et al., 2020a), while the dark green color represents
reusable components from Supersuit (Terry et al., 2020b).
ple rewards implemented by default are based on
stored data for features such as: average wait time
at each traffic light and lane, pressure, total num-
ber of vehicles waiting in each lane, and density.
The user can calculate other rewards based on
these characteristics or expand the possible char-
acteristics according to the documentation.
3. take action: In the default implementation, this
follows the state of the art - either no action is
taken or it moves to the next phase defined in the
simulation data for the particular controlled inter-
section. A possible example of a custom experi-
ment could be to override the default behavior to
switch to different phases as needed, not necessar-
ily in a consecutive cycle as the default.
Traffic Light Control using Reinforcement Learning: A Survey and an Open Source Implementation
75
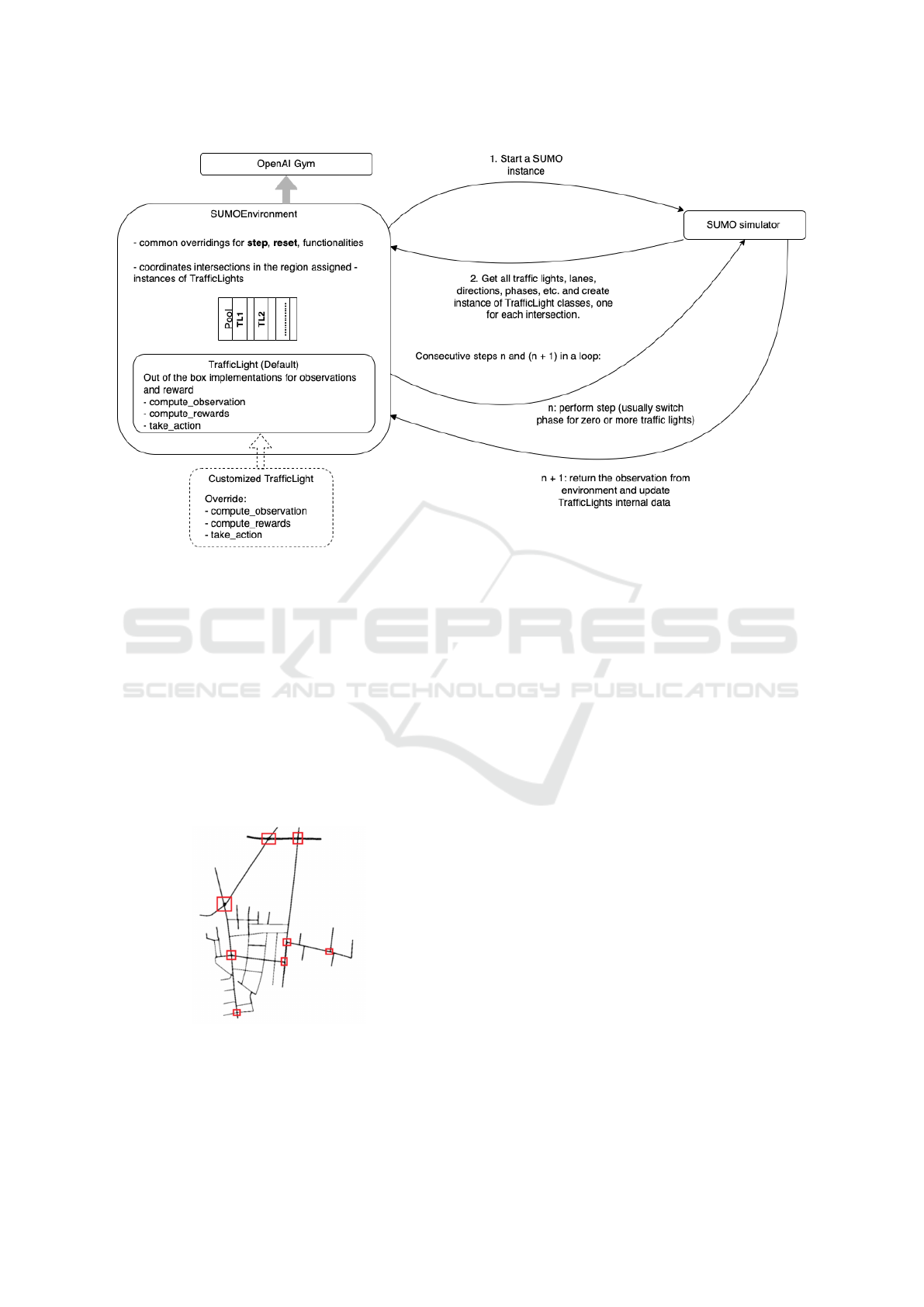
Figure 4: The interaction flow between an environment class, the SumoEnvironment class, and the simulator SUMO (Kra-
jzewicz et al., 2012). The class instantiates a TrafficLight object for each intersection in the scenario loaded in SUMO.
4 EVALUATION
We evaluated the implementation with the RESCO
benchmark (Ault and Sharon, 2021) and show the re-
sults in a specific case involving a scenario with eight
intersections in the Cologne (Germany) area (Figure
5) with real data on road routing, arrival, and desti-
nation times of cars. As in the original benchmark,
we consider the recorded data in the time interval be-
tween 25200 and 28800 seconds. The platform used
for the training was a cluster of 8 GPUs, Nvidia A100.
Figure 5: The region in Cologne where the data used in the
analysis was collected. The red boxes show the locations of
the intersections. Each is assigned a traffic light agent.
Our goal in the evaluation (given also the limited
space) was to compare how different RL methods per-
form from different perspectives. We chose one of the
standard rewards, observations, and action spaces by
following the literature and observing the similarities
between the state of the art (Lin et al., 2018). The
performance of the algorithms could change signifi-
cantly if these standard operations are overridden by
the user in various ways. The framework provided has
a custom plotting mechanism on Tensorboard that is
specific to the metrics for the traffic light control op-
timization problem. According to the documentation
provided in the repository, the set of metrics captured
can be easily extended by the end user.
The algorithms selected for comparison were cho-
sen from the best performing algorithms in different
classes: DQN (Wang et al., 2016) (version with duel
networks, target networks and prioritized experience
rendering), PPO (Schulman et al., 2017), A3C (Mnih
et al., 2016) and SAC (Haarnoja et al., 2018). We
divide the evaluation options into three categories:
• Best runs for each algorithm: the graphs in Fig-
ures 6, 7, 8, 9 below show the best runs for each
algorithm evaluated and the following metrics col-
lected: The average and the maximum waiting
time of vehicles at a traffic light, the average and
the maximum number of vehicles per lane in the
evaluated scenario.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
76

• Training progress over time: the graphs in Figures
10, 11, 12, 13 show how the same set of metrics as
in the first point above evolve over time (realtive
to the episode index).
• Training efficiency: how quickly each algorithm
manages to train a given number of episodes (Fig-
ure 14). This can be valuable for large scenarios
(in terms of the number of intersections to opti-
mize).
Figure 6: Best run comparison for the average number of
vehicles stopped at a traffic light.
Figure 7: Best run comparison for the maximum number of
vehicles stopped at a traffic light.
Figure 8: Best run comparison for the average waiting time
of vehicles at a traffic light.
Figure 9: Best run comparison for the maximum waiting
time of vehicles at a traffic light.
As a conclusion from the comparison of algo-
rithms, we can say that the best performance in terms
of collected relevant metrics are (Mnih et al., 2016)
and (Haarnoja et al., 2018). When evaluating the
most efficient method in terms of training time, PPO
(Schulman et al., 2017) proved to be the optimal so-
lution. This was to be expected considering the the-
Figure 10: Comparison of progress for the average number
of vehicles stopped at a traffic light.
Figure 11: Progress comparison for the maximum number
of vehicles stopped at a traffic light.
Figure 12: Progress comparison for the average waiting
time of vehicles at a traffic light.
Figure 13: Progress comparison for the maximum waiting
time of vehicles at a traffic light.
Figure 14: Compare training time speed to get to different
episode counts.
oretical trade-offs between the different classes of al-
gorithms in terms of episode sample complexity and
training stability. Future work may draw further con-
clusions between these classes in the presence of very
large scenarios with a significant number of intersec-
tions that are simultaneously optimized cooperatively.
Traffic Light Control using Reinforcement Learning: A Survey and an Open Source Implementation
77

5 CONCLUSIONS AND FUTURE
WORK
In this paper, we first presented the state of the art in
traffic light control optimization using reinforcement
learning methods and dynamic switching of traffic
light phases. We then justified the importance of de-
veloping a set of tools to separate reinforcement learn-
ing methods from the technical aspects of applying
the techniques to the targeted optimization problem.
We compared a number of well-known algorithms in
the field of RL. We hope that the work described in
this paper will help the community to perform more
experiments in a simpler way than before.
Our plan is to conduct more experiments and
adopt various modern methods from the computer vi-
sion field for state mapping. We also want to pro-
vide more off-the-shelf implementations for various
RL rewards, observation mappings, and metrics that
outperform the state of the art results. Graph neural
networks (GNN) (Deepmind and Google, 2020) that
could map the environment states for the RL agents is
another future topic of interest.
ACKNOWLEDGEMENTS
This work was supported by a grant of Romanian
Ministry of Research and Innovation UEFISCDI no.
56PTE/2020.
REFERENCES
Alegre, L. N. (2019). SUMO-RL. https://github.com/
LucasAlegre/sumo-rl.
Association for Standardization of Automation and Mea-
suring Systems (2021). ASAM OpenDRIVE. https:
//www.asam.net/standards/detail/opendrive.
Ault, J., Hanna, J. P., and Sharon, G. (2020). Learning an
interpretable traffic signal control policy. In 19th Int.
Conf. on Autonomous Agents and Multiagent Systems,
AAMAS 2020,, pages 88–96. International Foundation
for Autonomous Agents and Multiagent Systems.
Ault, J. and Sharon, G. (2021). Reinforcement learning
benchmarks for traffic signal control. In 35th Conf.
on Neural Information Processing Systems Datasets
and Benchmarks Track NeurIPS (Round 1).
BOLT (2020). Simulating cities for a better ride-hailing
experience at Bolt. https://medium.com/bolt-
labs/simulating-cities-for-a-better-ride-hailing-
experience-at-bolt-f97af9190ada.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nai gym.
Button, K. and Hensher, D. (2007). Handbook of Transport
Modelling, volume 1. Emerald Publishing.
California Department of Transportation (2021). Cal-
trans performance measurement system. https://
pems.dot.ca.gov.
Capasso, A., Bacchiani, G., and Molinari, D. (2020). Intel-
ligent roundabout insertion using deep reinforcement
learning. In 12th Int. Conf. on Agents and Artificial In-
telligence - Volume 2, ICAART, 2020, pages 378–385.
SciTePress.
Casas, N. (2017). Deep reinforcement learning for urban
traffic light control. Master Thesis in Advanced Ar-
tificial Intelligence, Department of Artificial Intelli-
gence, Universidad Nacional de Educaci
´
on a Distan-
cia.
Chen, C., Wei, H., Xu, N., Zheng, G., Yang, M., Xiong, Y.,
Xu, K., and Li, Z. (2020). Toward a thousand lights:
Decentralized deep reinforcement learning for large-
scale traffic signal control. AAAI Conference on Arti-
ficial Intelligence, AAAI 2020, 34(04):3414–3421.
Chu, T., Wang, J., Codec
`
a, L., and Li, Z. (2020). Multi-
agent deep reinforcement learning for large-scale traf-
fic signal control. IEEE Trans. Intell. Transp. Syst.,
21(3):1086–1095.
D
´
ıaz, N., Guerra, J., and Nicola, J. (2018). Smart traffic
light control system. In IEEE Third Ecuador Techni-
cal Chapters Meeting ETCM 2018, pages 1–4.
Deepmind and Google (2020). Traffic predic-
tion with advanced graph neural networks.
https://deepmind.com/blog/article/traffic-prediction-
with-advanced-graph-neural-networks.
Dhariwal, P., Hesse, C., Klimov, O., Nichol, A., Plappert,
M., Radford, A., Schulman, J., Sidor, S., Wu, Y.,
and Zhokhov, P. (2017). Openai baselines. https:
//github.com/openai/baselines.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. arXiv 1711.03938.
European Commission (2021). Smart cities.
https://ec.europa.eu/info/eu-regional-and-urban-
development/topics/cities-and-urban-development/
city-initiatives/smart-cities en.
Fujita, Y., Nagarajan, P., Kataoka, T., and Ishikawa, T.
(2021). ChainerRL: A deep reinforcement learn-
ing library. Journal of Machine Learning Research,
22(77):1–14.
Genders, W. and Razavi, S. (2016). Using a deep reinforce-
ment learning agent for traffic signal control. arXiv
1611.01142.
Guadarrama, S., Korattikara, A., Ramirez, O., Castro, P.,
Holly, E., Fishman, S., Wang, K., Gonina, E., Wu,
N., Kokiopoulou, E., Sbaiz, L., Smith, J., Bart
´
ok, G.,
Berent, J., Harris, C., Vanhoucke, V., and Brevdo,
E. (2018). TF-Agents: A library for reinforcement
learning in tensorflow. https://github.com/tensorflow/
agents. [Online; accessed 25-June-2019].
Haarnoja, T., Zhou, A., Abbeel, P., and Levine, S. (2018).
Soft actor-critic: Off-policy maximum entropy deep
reinforcement learning with a stochastic actor. In 35th
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
78

Int. Conf. on Machine Learning, ICML 2018, vol-
ume 80 of Proc. of Machine Learning Research, pages
1856–1865. PMLR.
Horni, A., Nagel, K., and Axhausen, K. (2016). The
Multi-Agent Transport Simulation, volume 1. Ubiq-
uity Press.
Innes, J. and Kouhy, R. (2011). The Activity-Based Ap-
proach, pages 243–274. Palgrave Macmillan UK.
Krajzewicz, D., Erdmann, J., Behrisch, M., and Bieker-
Walz, L. (2012). Recent development and applications
of SUMO - Simulation of Urban MObility. Interna-
tional Journal On Advances in Systems and Measure-
ments, 3 and 4.
Liang, E., Liaw, R., Nishihara, R., Moritz, P., Fox, R., Gold-
berg, K., Gonzalez, J., Jordan, M. I., and Stoica, I.
(2018). RLlib: Abstractions for distributed reinforce-
ment learning. In 35th Int. Conf. on Machine Learn-
ing, ICML 2018, volume 80 of Proceedings of Ma-
chine Learning Research, pages 3059–3068. PMLR.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., and Wierstra, D. (2016). Contin-
uous control with deep reinforcement learning. In 4th
Int. Conference on Learning Representations, ICLR
2016 posters.
Lin, Y., Dai, X., Li, L., and Wang, F.-Y. (2018). An ef-
ficient deep reinforcement learning model for urban
traffic control. arXiv 1808.01876.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap,
T. P., Harley, T., Silver, D., and Kavukcuoglu, K.
(2016). Asynchronous methods for deep reinforce-
ment learning. In 33rd Int. Conf. Machine Learning,
ICML 2016, volume 48 of JMLR Workshop and Con-
ference Proceedings, pages 1928–1937. JMLR.org.
Ort
´
uzar, J. d. D. and Willumsen, L. (2011). Modelling
Transport, 4th Ed. Wiley.
OSRM (2020). Routing machine project OSRM. http://
project-osrm.org.
Project SUMBA (2020). Guidance for transport modelling
and data collection. https://www.eltis.org/resources/
tools/guidance-transport-modelling-and-transport-
data-collection-intermodality.
S. Sutton, R. and G. Barto, A. (2018). Reinforcement Learn-
ing: An Introduction 2nd Ed. MIT Press.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. arXiv 1707.06347.
TensorBoard (2021). https://www.tensorflow.org/
tensorboard.
Terry, J. K., Black, B., Grammel, N., Jayakumar, M., Hari,
A., Sulivan, R., Santos, L., Perez, R., Horsch, C.,
Dieffendahl, C., Williams, N. L., Lokesh, Y., Sulli-
van, R., and Ravi, P. (2020a). PettingZoo: Gym for
multi-agent reinforcement learning. arXiv preprint
arXiv:2009.14471.
Terry, J. K., Black, B., and Hari, A. (2020b). Supersuit:
Simple microwrappers for reinforcement learning en-
vironments. arXiv preprint arXiv:2008.08932.
Terry, J. K., Grammel, N., Black, B., Hari, A., Horsch,
C., and Santos, L. (2021). Agent environment cycle
games.
Tom
´
asek, P., Hor
´
ak, K., Aradhye, A., Bosansk
´
y, B., and
Chatterjee, K. (2021). Solving partially observable
stochastic shortest-path games. In 30th Int. Joint Conf.
on Artificial Intelligence, IJCAI 2021, pages 4182–
4189. ijcai.org.
Walraven, E., Spaan, M. T., and Bakker, B. (2016). Traf-
fic flow optimization: A reinforcement learning ap-
proach. Engineering Applications of Artificial Intelli-
gence, 52:203–212.
Wang, Z., Schaul, T., Hessel, M., van Hasselt, H., Lanctot,
M., and de Freitas, N. (2016). Dueling network ar-
chitectures for deep reinforcement learning. In 33rd
Int. Conf. on Machine Learning, ICML 2016, vol-
ume 48 of JMLR Workshop and Conference Proceed-
ings, pages 1995–2003. JMLR.org.
Wiering, M., Vreeken, J., Veenen, J., and Koopman, A.
(2004). Simulation and optimization of traffic in a
city. In IEEE Intelligent Vehicles Symposium, pages
453 – 458. IEEE.
Wu, T., Zhou, P., Liu, K., Yuan, Y., Wang, X., Huang, H.,
and Wu, D. O. (2020). Multi-agent deep reinforce-
ment learning for urban traffic light control in vehic-
ular networks. IEEE Transactions on Vehicular Tech-
nology, 69(8):8243–8256.
Zheng, G., Xiong, Y., Zang, X., Feng, J., Wei, H., Zhang,
H., Li, Y., Xu, K., and Li, Z. (2019). Learning phase
competition for traffic signal control. In 28th ACM Int.
Conf. on Information and Knowledge Management,
CIKM 2019, pages 1963–1972. ACM.
Traffic Light Control using Reinforcement Learning: A Survey and an Open Source Implementation
79
