
Real-Time 3D Object Detection and Recognition using a Smartphone
Jin Chen
1a
and Zhigang Zhu
1,2 b
1
Visual Computing Laboratory/Data Science and Engineering Program, Computer Science Department,
The City College of New York - CUNY, New York, NY 10031 U.S.A.
2
PhD Program in Computer Science, The Graduate Center - CUNY, New York, NY 10016, U.S.A.
Keywords: 3D Object Detection, 3D Object Tracking, Obstacle Detection, Assistive Computer Vision.
Abstract: Real-time detection of 3D obstacles and recognition of humans and other objects is essential for blind or low-
vision people to travel not only safely and independently but also confidently and interactively, especially in
a cluttered indoor environment. Most existing 3D obstacle detection techniques that are widely applied in
robotic applications and outdoor environments often require high-end devices to ensure real-time performance.
There is a strong need to develop a low-cost and highly efficient technique for 3D obstacle detection and
object recognition in indoor environments. This paper proposes an integrated 3D obstacle detection system
implemented on a smartphone, by utilizing deep-learning-based pre-trained 2D object detectors and ARKit-
based point cloud data acquisition to predict and track the 3D positions of multiple objects (obstacles, humans,
and other objects), and then provide alerts to users in real time. The system consists of four modules: 3D
obstacle detection, 3D object tracking, 3D object matching, and information filtering. Preliminary tests in a
small house setting indicated that this application could reliably detect large obstacles and their 3D positions
and sizes in the real world and small obstacles’ positions, without any expensive devices besides an iPhone.
1 INTRODUCTION
Visual impairment is the loss of some or all vision
perception and is not easily fixable with treatments,
such as glasses, contact lenses, medication, or
surgery. The blind or low-vision (BLV) population
has continuously grown over the past three decades
and is expected to increase significantly as the
population ages (Bourne et al., 2020). There are an
estimated 49.1 million people who are blind in 2020
globally, and 255 million people with moderate or
severe visual impairment (MSVI), with visual acuity
worse than 6/12 to 6/18 (Bourne et al., 2020).
Being able to travel safely in an indoor
environment is essential for BLVs to be successful in
their jobs and assist their daily activities for a better
quality of life. An indoor environment can be
cluttered and changed more often than an outdoor
environment. BLVs can easily bump into obstacles
with limited space for movement in an indoor area.
White canes (long canes) and guide dogs are the most
common tools used to detect obstacles and navigate.
a
https://orcid.org/0000-0003-1810-3828
b
https://orcid.org/0000-0002-9990-1137
However, these tools cannot provide comprehensive
information about the surroundings to help them
avoid dangerous areas. Based on a survey of 300
legally blind or blind individuals (Manduchi and
Kurniawan, 2010), over 40% of respondents
experienced head-level accidents at least once a
month, even with a white cane or a guide dog.
Furthermore, indoor environments are subject to
more changes than outdoor environments, where
objects and people move around. Many navigation
applications cannot immediately reflect the
environmental changes when planning paths. This
may result in obstacles presenting along the intended
routes, which increases the risk of BLV users
bumping into obstacles when following guidance.
Therefore, a real-time obstacle detection application
is essential for improving safety while travelling.
Even though safety is the number one need,
recognition of humans and other objects would also
enhance BLVs’ understanding of their surroundings,
thus significantly improving their quality of life.
Object detection is a fundamental topic in computer
vision that has been extensively studied. Numerous
158
Chen, J. and Zhu, Z.
Real-Time 3D Object Detection and Recognition using a Smartphone.
DOI: 10.5220/0011060600003209
In Proceedings of the 2nd International Conference on Image Processing and Vision Engineering (IMPROVE 2022), pages 158-165
ISBN: 978-989-758-563-0; ISSN: 2795-4943
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

techniques have been developed and applied for
multiple applications, particularly in autonomous
vehicles.
Real-time 2D object detection techniques are well
developed; however, 3D object detection helps BLVs
better understand their surroundings, select a safe
path, enjoy the environment, and interact with other
people. However, multiple challenges exist in
converting the 2D bounding boxes detected by 2D
object detectors into 3D bounding boxes. Objects in
the same category (e.g., chairs or tables) can have
various appearances, shapes, and sizes. Real-time 3D
object detection and recognition often involves high-
end devices that are too expensive for BLVs to afford
and/or too heavy to carry. Data show that 89% of
BLV people live in low- or middle-income countries
(Ackland et al., 2017). 3D object detection often uses
deep learning models, which require enormous
computational power to ensure real-time
performance. Moreover, most state-of-the-art 3D
object recognition methods focus on the outdoor
environment, owing to the high demand for
autonomous driving. There is a lack of effective real-
time techniques for detecting and tracking 3D objects
in indoor environments.
Information filtering is another problem for BLV
users with multiple detected objects, especially in
real-time detection, where the detection information
changes rapidly over time. BLV users may become
confused and frustrated with the massive amount of
information provided and may easily miss the
information they need; thus, only reporting the
essential information to BLV users is critical.
This paper proposes a low-cost and efficient real-
time 3D obstacle detection iOS application for BLV
users to help them overcome these problems and
increase their accessibility in indoor areas. The main
contributions of this study are as follows:
1. A real-time 3D obstacle detection and object
recognition system integrating ARKit and a
pre-trained 2D object detection model
working in the iOS device.
2. 3D object tracking method utilizing the 2D
image tracker and AR point cloud to
improve the time performance and object
identification.
3. An information filtering method extracting
and reporting only essential information for
BLV users from a set of massive objects
detected over time.
The remainder of this paper is organized as
follows. Section 2 provides a brief overview of the
state-of-the-art 2D and 3D object detection methods.
Section 3 describes the proposed 3D obstacle
detection and object recognition system. The results
of our method and discussion are provided in Section
4. Finally, a summary of the proposed system and a
discussion of future work are presented in Section 5.
2 RELATED WORK
2.1 2D Object Detection
2D object detection predicts the class labels and
bounding boxes of objects from an image input. There
are two main types of object detectors: two-stage and
one-stage. R-CNN families (e.g., Fast R-CNN
(Girshick, 2015) and Mask R-CNN (He et al., 2017))
are two-stage object detectors where detection begins
by extracting the region of interest (ROI) using a
regional proposal network (RPN). In the second stage,
the bounding boxes of the objects are refined using
regression and classified into different classes. One-
stage object detectors (e.g., YOLO (Redmon and
Farhadi, 2018), SSD (Liu et al., 2016), RetinaNet
(Lin et al., 2017)) do not have an ROI extraction stage
and directly detect the bounding boxes of the objects
from the image with a dense sampling of areas. Two-
stage detectors usually require a longer process time
than one-stage detectors but have higher accuracy
(Soviany and Ionescu, 2018).
2D object detection techniques are sufficiently
mature to support real-time performance. However,
2D bounding boxes with object labels do not provide
sufficient information for BLVs to obtain a more
comprehensive understanding of the indoor
environment they are in to help them avoid obstacles
along their path and walk around with both
confidence and interaction with other people.
Nevertheless, 2D detectors can be used as the basis
for 3D object detection.
2.2 3D Object Detection
3D object detection usually estimates three-
dimensional bounding boxes for objects in a scene.
Compared with 2D object detection methods that use
only RGB images, 3D object detection methods
typically use depth images, stereo images, or point
cloud data to obtain 3D information.
Denoising and ground detection are essential steps
in 3D detection approaches for all the data types.
(Huang et al., 2015) removed depth map noise with
morphological closing (dilation and then erosion),
and then used the standard least-squares method and
V-disparity method (Soquet et al., 2007) to estimate
ground curves and a height threshold for obstacles.
Real-Time 3D Object Detection and Recognition using a Smartphone
159

The region growth method was subsequently applied
to distinguish different objects. (Cheng et al., 2015)
applied a seeded region growth method with Sobel
edges to detect the ground and obstacles using depth
maps generated from an RGB-D camera for obstacle
detection. Their method had a refreshing frequency of
10 frames per second (fps). (Sun et al., 2020) applied
a semantic segmentation method with a deep learning
model to RGB-D images that could support real-time
performance at 22Hz using an Nvidia GTX2080Ti
GPU for obstacle detection.
The deep stereo geometry network (DSGN) uses
the 2D image features extracted from stereo images at
both the pixel and semantic levels to construct the
plane-sweep volume (PSV) with depth estimation
(Chen et al., 2020). A 3D geometric volume was
constructed from the PSV and used to detect objects
using a 3D neural network. The method has an
average 0.682s process time per frame and an average
depth error of 0.55m with NVIDIA Tesla V100.
Different lighting conditions can affect the
estimated depth values and decrease the accuracy of
the object positions in these methods. Furthermore,
the object class information is missing, and smaller
objects are not detected well in these methods.
Therefore, they are not suitable for real-time systems
combined with navigation purposes, as they consume
enormous computational power in complex scenes.
2.2.1 3D Point Cloud Data
Point cloud obstacle detection is more popular for
indoor obstacle detection as it contains richer
information than depth maps. (Pham et al., 2016)
used RGB-D images with accelerometer data to
reconstruct the point clouds of a scene. Voxelization
and pass-through filters were applied to remove noise
and the random sample consensus (RANSAC)
algorithm (Fischler and Bolles, 1981) was used to
segment planes and detect the ground plane of the
scene. With the ground plane removed, various
algorithms were applied to detect doors, stairs, and
other loose obstacles.
In addition to depth images, LiDAR has been used
more frequently in recent years as it constructs a more
accurate point cloud and contains more information,
such as intensity and angle. (He et al., 2021) used the
American Velodyne-16 line LiDAR, which can
generate 300K points per second. A pass-through
filter and voxel mesh method were used to filter the
noise data as the sparsity of point cloud increased
with distance. RANSAC and K-D trees were applied
for plane segmentation and object clustering with
thresholding. (Garnett et al., 2017) proposed a unified
deep convolutional network with a LiDAR point
cloud to achieve real-time performance (30fps) for
both categorical-based and general obstacle detection
in outdoor environments. It uses a column-based
approach for general obstacle detection and StixelNet
(Levi et al., 2015) as the base. Nevertheless, these
solutions are primarily workable for autonomous
driving but are not readily usable for BLV users in
indoor environments.
2.2.2 AR Point Cloud
Apple's augmented reality (AR) platform, ARKit
(Apple Inc.), contains an AR point cloud with all
detected feature point (i.e., distinctive markers)
positions in the 3D camera coordinates. It generates a
sparse point cloud for every camera frame that
contains only features captured in a single frame.
Despite its sparsity, it can detect horizontal and
vertical planes in the scene, which is useful for
detecting large obstacles. The user’s movement and
the captured 2D video frames can detect and track
visual feature points to estimate their position in the
real-world coordinate system. With the capabilities of
ARKit, our proposed 3D object detection system will
be built on top of ARKit.
2.3 3D Object Tracking
Unlike 2D trackers (Karunasekera et al., 2019;
Marques, 2020) which track objects across multiple
frames, 3D trackers use point cloud data that often
apply 3D Kalman filters to estimate object positions.
The IMM-UKF-JPDAF-based tracker (Sualeh
and Kim, 2020) combines the unscented Kalman
filter and joint probabilistic data association filter
(Rezatofighi et al., 2015) for the state estimation of
multiple objects with a Gaussian assumption
distribution. A clustering technique is applied to
mitigate potential combinatorial explosions. (Wang
and Wu, 2021) proposed a switching reference point
method with both centroid and corner points for a
LiDAR-based tracking system to handle abrupt
changes in the position of an object’. In our work, we
modified the 2D tracking technique (Marques, 2020)
for 3D tracking for the sake of time efficiency.
3 METHODS
The 3D obstacle detection and object recognition
system consisted of four modules (Fig. 1): (1) 3D
obstacle detection, (2) 3D object tracking, (3) 3D
object matching, and (4) information filtering.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
160
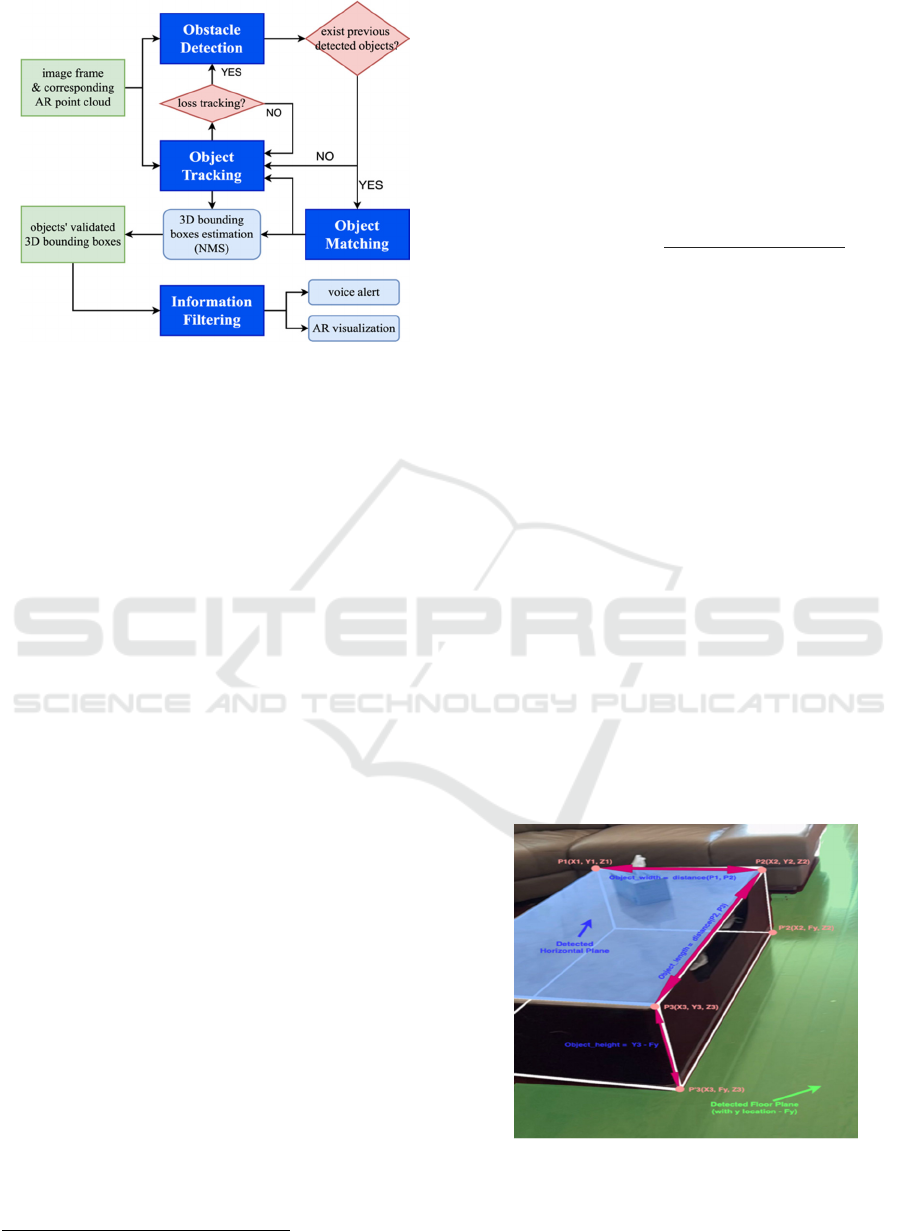
Figure 1: Workflow of the 3D obstacle detection and object
recognition system.
The 3D obstacle detection module integrates the 2D
bounding boxes and labels from the 2D object
detector (YOLOv3) and point cloud and detected
plane from ARKit to generate the 3D bounding boxes
of the objects for each image frame. The 3D object
tracking module tracks each object’s 2D bounding
box from the current frame to the next frame and
augments the AR point cloud data to generate the
tracked 3D bounding box of each object. Next, in the
object matching module, newly detected objects in
the current frame are matched with the detected
objects in the previous frames to reduce duplications
of multiple instances of the same objects. Finally, the
information filtering module determines the essential
information to guide BLV users to avoid obstacles
from the set of objects detected over time.
3.1 3D Obstacle Detection
The proposed 3D obstacle detection module utilizes
both the point cloud generated by ARKit and 2D
bounding boxes estimated by a pre-trained YOLOv3
object detector
3
to obtain a rough estimation of the 3D
bounding boxes of the detected objects. This module
comprises three steps: plane segmentation, 2D object
detection, and 3D bounding box determination.
An ARKit 3D model constructs a point cloud from
the feature points collected over the camera frames to
the current frame, and can estimate vertical and
horizontal planes with sufficient 3D points collected.
The floor plane determined based on the sizes and
positions of all detected planes. The other detected
planes were considered to be obstacles. The system
cannot estimate the 3D bounding boxes for the
3
https://developer.apple.com/machine-learning/models/
detected vertical planes because of the missing length
or width information in the captured scene. The
system aims to guide BLV users to avoid obstacles,
so it tracks the distance between the device position
and vertical planes. The 3D bounding box of an object
with a horizontal plane (Fig. 2) is determined by the
four endpoints (P1, P2, P3, and P4) of the horizontal
plane and floor plane y location (F
y
). The width and
length of the object are the distances between P1 to
P2 and P2 to P3, respectively, ignoring the y values:
,
(1)
The height of the object is the difference between the
horizontal plane y-location (H
y
) and floor plane y-
location (F
y
). The plane segmentation method can
only detect obstacles with large and flat surfaces.
Therefore, a pre-trained image object detector was
applied to handle other objects (e.g., small objects and
humans). The goal is to determine the 3D positions
and sizes of obstacles and to provide information to
users in real time to assist with other applications
(e.g., navigation). Therefore, one-stage object
detectors were chosen to minimize the computation
time. The YOLOv3 model (Redmon and Farhadi,
2018) was used in this study; however, it can be easily
altered with other 2D object detectors.
To convert the 2D bounding boxes detected by
YOLOv3 into 3D bounding boxes, we use the AR
point cloud of the corresponding camera frame (Fig.
3). The app’s frame rate was set at 30 fps because it
is difficult for the human eye to see differences above
30fps. We only processed the point cloud with
number of feature points above a threshold (i.e., 30),
and the typical range of the feature points detected in
each frame was between 0 and 200. The 3D bounding
Figure 2: The 3D bounding box of an object with a
horizontal plane.
Real-Time 3D Object Detection and Recognition using a Smartphone
161

Figure 3: From 2D bounding boxes to 3D bounding boxes using YOLOv3 and AR point cloud.
box estimation method first removes all points
belonging to the detected planes, and then projects the
remaining points into the 2D image coordinate system
and grouped feature points based on the 2D bounding
boxes of each detected object (Fig. 3 (a) to (b)). If the
object group contained fewer feature points than
threshold, its 3D bounding box was not computed.
For example, one of the flowerpots is ignored from
the step in Fig. 3 (b) to (c) because of insufficient
feature points within its 2D bounding box. The 3D
bounding box of each object was calculated using the
minimum and maximum values of the feature points
group x, y, and z (Fig. 3 (c) to (d)).
After estimating the 3D bounding boxes for all the
objects detected in the frame, the object matching
module is activated if previously detected objects
exist to either update the pre-detected objects’ 3D
bounding boxes or create new object instances. Each
detected object is assigned a unique tracking ID (tid).
Subsequently, the object tracking module tracks the
2D bounding boxes of objects in the next frame and
updates the 3D bounding boxes with the AR point
cloud of the new frame.
3.2 3D Object Tracking
AR point cloud is sparse and contains considerable
noise owing to various circumstances of the context,
such as low texture or colors, presence of shadows,
and poor lighting conditions. The sparsity within the
AR point cloud increases the errors in estimating the
3D bounding boxes of the objects. Hence, we used the
non-maximum suppression (NMS) method (Rothe et
al., 2014) across multiple estimated 3D bounding
boxes of the same object to obtain a more stable and
accurate 3D bounding box of the object.
4
https://developer.apple.com/documentation/vision/trackin
g_multiple_objects_or_rectangles_in_video
Tracking 2D bounding boxes of objects across
frames requires less computational power and is more
effective than performing object detection for each
frame. Moreover, due to the sparsity of AR point
cloud, 3D trackers are not suitable. By utilizing vision
algorithms
4
, we can track multiple detected 2D
objects across frames in real time.
Each tracking result provides an updated 2D
bounding box and confidence score of the tracked
object. If the confidence score of the track object is
above the threshold (i.e., 70%), a new 3D bounding
box is estimated with the corresponding frame’s AR
point cloud using the method described in Section
3.,1 and recorded. When an object has five or more
estimated 3D bounding boxes across multiple frames
(Fig. 4 (a)), the NMS method is applied to obtain the
final 3D bounding box (i.e., the validated 3D
bounding box), as shown in Fig. 4 (b). An object track
is considered to be lost in the new frame if its
confidence score is below a threshold. If one or more
objects lose tracks during the tracking mode, the
system restarts the object detection process (Section
3.1) to detect new objects.
Figure 4: (a) Five estimated 3D bounding boxes of a
flowerpot. (b) Validated 3D bounding box of the flowerpot
after NMS.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
162
3.3 3D Object Matching
Previously detected/tracked objects may be detected
again when the system switches between the tracking
and detection modes. The object matching module is
applied to avoid creating duplicate object instances
for the same object, which consists of three major
steps. First, each object in tracking mode updates its
3D bounding box with its tracking id (tid). Second,
the estimated 3D bounding boxes of the newly
detected objects were compared with 3D bounding
boxes for previously detected objects with the same
label. If the 3D bounding boxes overlap, it will not be
considered a new object; instead, it will update the 3D
bounding box of the overlapped object.
As mentioned previously, the estimated 3D
bounding box of an object from a single frame has
low accuracy; therefore, there might not always be an
overlap area for the same object. More importantly,
objects could be in motion between frames, therefore,
we also need to compare closely located objects with
the same label. The distance between the two 3D
bounding boxes is calculated using the sum of the
distance between two nearest endpoints in each of the
three axes where bounding boxes do not overlap. If
the distance is less than the threshold, it is considered
to be the same object; otherwise, it is treated as a new
object. After handling all objects, the system switches
to the tracking mode for the next frame.
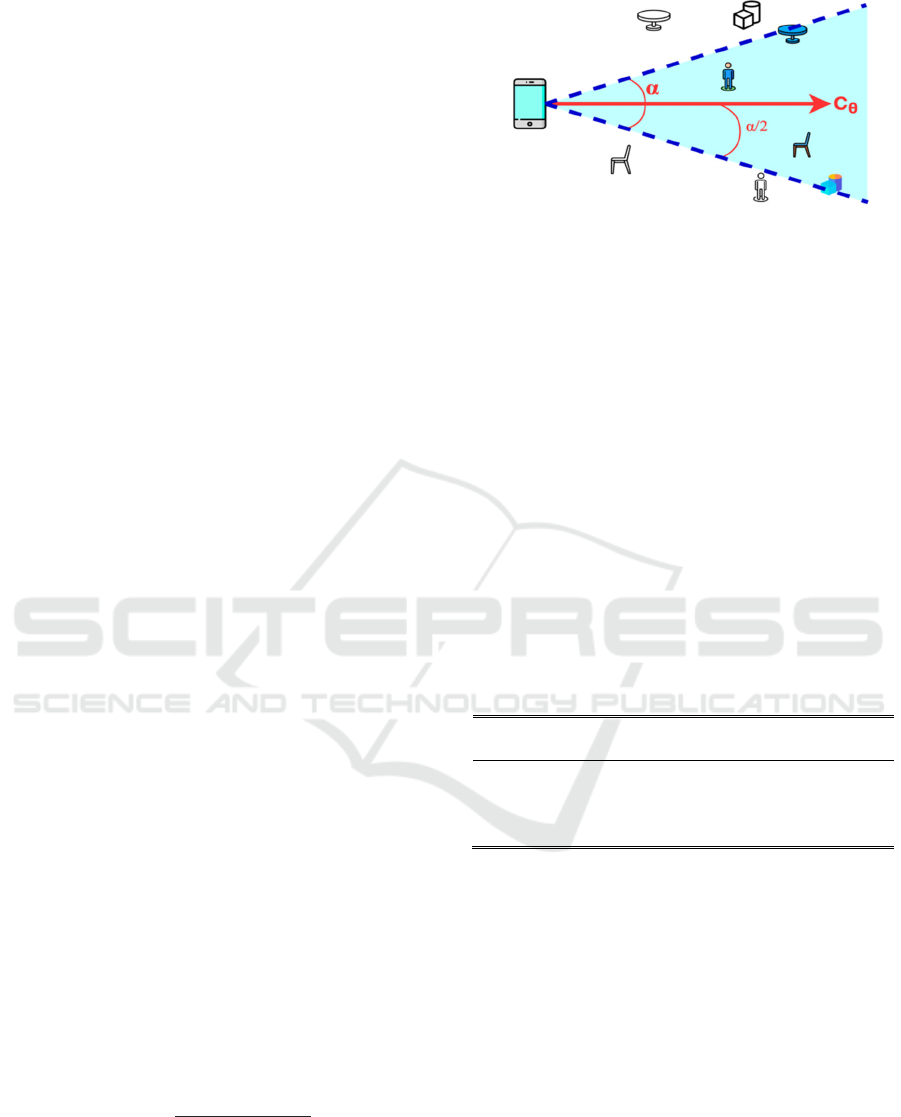
3.4 Information Filtering
With massive objects detected over time, information
filtering is required to extract essential information to
guide BLV users to avoid obstacles. It filters out all
detected obstacles that are not within a certain angular
range (α = 60° in our current experiments) of camera
orientation. As shown in Fig. 5, the obstacles outside
the blue region were ignored. Afterward, the
remaining objects are sorted by alert priority using
Equation (2), which is calculated based on the
distance between the user’s camera position (C
p
),
object’s center position (O
p
), and object size (O
s
). The
distance between the object and camera is calculated
using the closest point in object’s 3D bounding box
without considering the differences in the y-axis. The
distance weighs more than the object size (a ≫ b).
,
,
,
,
∗
(2)
If the object alert priority value exceeds a
threshold, the distance and direction of an object are
provided as voice notifications. AR visualizations of
detected obstacle bounding boxes were added to show
Figure 5: Filtering objects within the angular range (α) with
respect to the camera orientation (C
θ
).
and verify the detection results. These visualizations
may provide additional visual aids for people with
low vision or other disabilities (e.g., autism spectrum
disorder) during an emergency evacuation. The colors
and transparency levels of displayed AR assets were
determined by the object labels and confidence scores
from the detection or tracking results, respectively.
4 EXPERIMENTAL RESULTS
An iOS app was created to test real-time 3D obstacle
detection results. Hosting image detection on cloud
consumes more time for image uploading; therefore,
2D object detection is performed on an iPhone.
Table 1: Computation time (mean ± std) of four module
using iPhone 13 Pro Max.
Computation Time (ms)
YOLOv3 YOLOv3 Tiny
Obstacle
Detection
44.69±3.86 26.09±9.62
Object Tracking 12.13±11.79 12.64±8.37
Object Matching 0.65±0.77 0.29±0.42
Information Filtering 0.04±0.06 0.02±0.007
Table 1 shows the breakdown of the times spent
on the four modules in milliseconds (ms) with
YOLOv3 and YOLOv3 Tiny models using iPhone 13
Pro Max in the same environment. The YOLOv3
model (248.4MB) took approximately 3 to 5 seconds
to initially load to the app. For each frame, it took an
average of 44.69ms to detect objects and 12.13ms to
track objects; both included the time for estimating
3D bounding boxes. In comparison, the YOLOv3
Tiny model (35.4MB) contains fewer convolution
layers, which reduces the computation time. It took
less than one second to load, and less time for object
detection. However, YOLOv3 performs better than
YOLOv3 Tiny for smaller object detection.
Furthermore, YOLOv3 is more stable with a smaller
standard deviation in the object detection time.
Real-Time 3D Object Detection and Recognition using a Smartphone
163

(a) (b) (c)
Figure 6: 3D obstacle detection results; (a) table and chair, (b) large obstacles, (c) small objects.
The computation time varied based on the number
of objects detected in the image frames and the
number of feature points in the AR point cloud. This
uncertainty contributed to a large standard deviation
in the computation time of the object tracking and
object matching modules. From Table 1, most of the
computation time was spent on the object detection
module for both models. Alternatively, the system
can use any 2D object detector based on the purpose
of the application. On the average, the system can
achieve a time performance of 10-15 fps using
YOLOv3 on an iPhone 13 Pro Max.
Fig. 6 shows three detection results: a table and
two chairs under a complex background, large
obstacles under a clean background, and small bottles
on table. The estimated 3D bounding boxes for large
obstacles are more accurate than those for small
obstacles and are determined faster and farther, as
they have larger 2D image bounding boxes. Due to
thresholding, smaller objects took more image frames
to obtain a validated 3D bounding box, as they often
do not contain sufficient context in the AR point
cloud. Smaller objects also have low-accuracy 3D
bounding boxes (Fig. 6 (c)). However, the app can
solidly obtain the 3D positions of small objects. Our
work aims to avoid BLV people colliding with
obstacles. In most cases, small objects are placed on
top of large objects, such as a table, so helping BLV
users avoid large obstacles would help them avoid
these small obstacles. Although the detected 3D
bounding boxes do not always align with the actual
object sizes in the real world, they are sufficient to
warn BLVs to move away from it. The proposed
algorithm can also work in real time, as shown in the
demo video: https://youtu.be/L4zloslQ_8c.
5 CONCLUSION AND
DISCUSSION
In the current work, the proposed 3D obstacle
detection and object recognition system works well
for detecting large obstacles in the real world with 3D
positions and 3D bounding boxes. The system does
not require multiple sensors or trains a new deep
learning model besides a pre-trained 2D object
detection model and works efficiently in real time.
The system can easily adapt to any pre-trained object
detection model for better performance. With the
information filtering module, it is feasible to increase
the safety of BLV users to travel indoors.
Few areas can be improved in current system. Due
to the sparsity of the AR point cloud, the matching
module also considers nearby objects with 3D
bounding boxes within the distance threshold as the
same object. It is possible to mistakenly consider two
distinct objects of the same class to be the same
object. Several methods have been planned to
mitigate this issue. The first is to replace the AR point
cloud with the LiDAR point cloud to obtain a denser
point cloud and consider only overlapped 3D
bounding boxes. Object motion can also increase the
difficulty of the matching process such as people
walking. To adapt to objects’ motion change, the
changes in camera positions and orientations, and
changes in the objects’ bounding boxes across camera
frames are used to enhance the matching and tracking
modules and update the object’s position.
One limitation of the current system is the
adaptation to object size changes. Usually, a non-
human object has a static shape. However, we would
also like to develop a method to detect people for
interactions. The positions and postures of people can
change over time, such as from sitting to standing,
leading to a change in the 3D bounding box. Because
our method uses the non-maximum suppression
method across multiple estimated 3D bounding boxes
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
164

to determine the final 3D bounding box of an object,
it is difficult to immediately update the 3D bounding
box corresponding to the object's size change.
Another limitation is that the system does not detect
stairs; therefore, it cannot work for floor transition.
In the future, we will be working on the discussed
area of improvement and solve the app's limitations.
Also, we would like to integrate this system with our
previous work (Zhu et al., 2020) in indoor navigation
apps and test with BLV users.
ACKNOWLEDGEMENTS
The research is supported by NSF (Awards
#2131186, #2118006, #1827505, and #1737533),
AFOSR (#FA9550-21-1-0082) and Intelligence
Community Center for Academic Excellence (IC
CAE) at Rutgers (#HHM402-19-1-0003 and
#HHM402-18-1-0007).
REFERENCES
Bourne, R. R., Adelson, J., Flaxman, S., Briant, P., Bottone,
M., Vos, T., ... & Taylor, H. R. (2020). Global Prevalence
of Blindness and Distance and Near Vision Impairment
in 2020: progress towards the Vision 2020 targets and
what the future holds. Investigative Ophthalmology &
Vis. Sci., 61(7),2317-2317.
Ackland, P., Resnikoff, S., & Bourne, R. (2017). World
blindness and visual impairment: despite many
successes, the problem is growing. Community eye
health, 30(100), 71.
Manduchi, R., & Kurniawan, S. (2010). Watch your head,
mind your step: mobility-related accidents experienced
by people with visual impairment. Dept. Comp. Eng.,
Univ. California, Santa Cruz, Tech. Rep.
Huang, H. C., Hsieh, C. T., & Yeh, C. H. (2015). An indoor
obstacle detection system using depth information and
region growth. Sensors, 15(10), 27116-27141.
Soquet, N., Aubert, D., & Hautiere, N. (2007). Road
segmentation supervised by an extended v-disparity
algorithm for autonomous navigation. In 2007 IEEE
Intell. Veh. Symp., pp. 160-165. IEEE.
Cheng, R., Wang, K., Yang, K., & Zhao, X. (2015). A ground
and obstacle detection algorithm for the visually
impaired. In 2015 IET ICBISP, pp. 1-6.
Sun, L., Yang, K., Hu, X., Hu, W., & Wang, K. (2020). Real-
time fusion network for rgb-d semantic segmentation
incorporating unexpected obstacle detection for road-
driving images. IEEE Robot. and Autom. Lett., 5(4),
5558-5565.
Chen, Y., Liu, S., Shen, X., & Jia, J. (2020). Dsgn: Deep
stereo geometry network for 3d object detection. In Proc.
IEEE CVPR, pp. 12536-12545.
Pham, H. H., Le, T. L., & Vuillerme, N. (2016). Real-time
obstacle detection system in indoor environment for the
visually impaired using microsoft kinect sensor. J. of
Sensors, 2016.
Apple Inc. Arkit - augmented reality. Apple Developer.
https://developer.apple.com/augmented-reality/arkit/
Redmon, J., & Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
He, C., Gong, J., Yang, Y., Bi, D., Lan, J., & Qie, L. (2021,
May). Real-time Track Obstacle Detection from 3D
LIDAR Point Cloud. In J. of Phys.: Conf. Ser., 1910(1),
p. 012002. IOP Publishing.
Garnett, N., Silberstein, S., Oron, S., Fetaya, E., Verner, U.,
Ayash, A., Goldner, V., Cohen, R., Horn, K., & Levi, D.
(2017). Real-time category-based and general obstacle
detection for autonomous driving. In Proc. IEEE
ICCVW, pp. 198-205.
Fischler, M. A., & Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with applications
to image analysis and automated cartography. Commun.
of the ACM, 24(6), 381-395.
Levi, D., Garnett, N., Fetaya, E., & Herzlyia, I. (2015,
September). StixelNet: A Deep Convolutional Network
for Obstacle Detection and Road Segmentation. In
BMVC, 1(2), p. 4.
Rothe, R., Guillaumin, M., & Van Gool, L. (2014,
November). Non-maximum suppression for object
detection by passing messages between windows. In
ACCV, pp. 290-306. Springer, Cham.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C. Y., & Berg, A. C. (2016). Ssd: Single shot multibox
detector. In ECCV, pp. 21-37. Springer, Cham.
Lin, T. Y., Goyal, P., Girshick, R., He, K., & Dollár, P.
(2017). Focal loss for dense object detection. In Proc.
IEEE ICCV, pp. 2980-2988.
Girshick, R. (2015). Fast r-cnn. In Proc. IEEE ICCV, pp.
1440-1448.
He, K., Gkioxari, G., Dollár, P., & Girshick, R. (2017). Mask
r-cnn. In Proc. IEEE ICCV
, pp. 2961-2969.
Soviany, P., & Ionescu, R. T. (2018, September). Optimizing
the trade-off between single-stage and two-stage deep
object detectors using image difficulty prediction. In
2018 SYNASC, pp. 209-214. IEEE.
Karunasekera, H., Wang, H., & Zhang, H. (2019). Multiple
object tracking with attention to appearance, structure,
motion and size. IEEE Access, 7, 104423-104434.
Sualeh, M., & Kim, G. W. (2020). Visual-LiDAR Based 3D
Object Detection and Tracking for Embedded Systems.
IEEE Access, 8, 156285-156298.
Rezatofighi, S. H., Milan, A., Zhang, Z., Shi, Q., Dick, A., &
Reid, I. (2015). Joint probabilistic data association
revisited. In Proc. IEEE ICCV, pp. 3047-3055.
Wang, M., & Wu, X. (2021). Multi-Object Tracking Strategy
of Autonomous Vehicle Using Modified Unscented
Kalman Filter and Reference Point Switching. J. of
Shanghai Jiaotong Univ. (Science), 26(5), 607-614.
Zhu, Z., Chen, J., Zhang, L., Chang, Y., Franklin, T., Tang,
H., & Ruci, A. (2020). iASSIST: An iPhone-Based
Multimedia Information System for Indoor Assistive
Navigation. In IJMDEM, 11(4), 38-59.
Marques, O. (2020). Computer Vision and Image Analysis
with the Vision Framework. In Image Process. and
Comp. Vision in iOS, pp. 41-50. Springer, Cham.
Real-Time 3D Object Detection and Recognition using a Smartphone
165
