
An Application of Scenario Exploration to Find New Scenarios for the
Development and Testing of Automated Driving Systems in Urban
Scenarios
Barbara Sch
¨
utt
1 a
, Marc Heinrich
1
, Sonja Marahrens
2
, J. Marius Z
¨
ollner
1
and Eric Sax
1
1
FZI Research Center for Information Technology, Karlsruhe, Germany
2
IPG Automotive GmbH, Karlsruhe, Germany
Keywords:
Advanced Driving Assistance Systems, Automated Driving, Scenario-based Testing, Scenario Exploration.
Abstract:
Verification and validation are major challenges for developing automated driving systems. A concept that gets
more and more recognized for testing in automated driving is scenario-based testing. However, it introduces
the problem of what scenarios are relevant for testing and which are not. This work aims to find relevant,
interesting, or critical parameter sets within logical scenarios by utilizing Bayes optimization and Gaussian
processes. The parameter optimization is done by comparing and evaluating six different metrics in two urban
intersection scenarios. Finally, a list of ideas this work leads to and should be investigated further is presented.
1 INTRODUCTION
The development of semi-automated, automated and
autonomous vehicles has played an important role in
the software and hardware departments of automotive
manufacturers during recent years. The consulting
company Gartner has already anticipated autonomous
things as a ”hot topic” several times in previous years
and is now going one step further. The current re-
port ”Top 10 Strategic Technology Trends for 2022”
predicts autonomic systems as a main area of inter-
est: systems that can not only make autonomous de-
cisions, but additionally are able to adapt and change
their behavior according to the environment (Gartner,
2021).
One type of autonomous or autonomic system are
automated vehicles. A major challenge besides their
development is to ensure that the system is suffi-
ciently safe and can be approved and permitted on
public roads. A widely discussed testing approach
is scenario-based testing: According to (Otten et al.,
2018), one goal is to take realistic field trial test drives
into simulation environments, where predefined sce-
narios often serve as a basis for the derivation of rel-
evant test cases in automated assessment and, thus,
reducing the needed amount of real test drives. More-
over, the proper representation and usage of scenar-
ios during the development process support a seam-
a
https://orcid.org/0000-0001-8439-0322
less development and testing of automated driving
functions, as well as the specification of requirements
and automated derivation of test cases (Bach et al.,
2016). However, the specification of scenarios can in-
clude parameter ranges, where only a sub-set of these
ranges might bring insight into the performance of an
automated driving function or hold critical scenarios.
Additionally, introducing new parameters or parame-
ter ranges in a scenario increases the number of sce-
narios exponentially.
Novelty and Main Contribution to the
State of the Art
The novelty and main contribution of this paper is
a parameter evaluation for finding challenging and
critical scenario parameters in predefined parameter
ranges. Thus, we
• optimize the parameters for different intersection
scenarios with different criticality metrics to find
interesting scenarios and to save simulation time,
and
• use the information gained by the optimization
process to further assess these parameters and
their meaning for redefining parameter ranges and
the evaluation and assessment of an automated
driving function.
338
Schütt, B., Heinrich, M., Marahrens, S., Zöllner, J. and Sax, E.
An Application of Scenario Exploration to Find New Scenarios for the Development and Testing of Automated Driving Systems in Urban Scenarios.
DOI: 10.5220/0011064600003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 338-345
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Structure
The paper is structured as follows: Section 2 briefly
introduces topics related to this work, e.g., sce-
nario abstraction levels or Bayes optimization. Sec-
tion 3 explains the proposed exploration algorithm
and setup, including the simulation environment setup
and evaluation. In section 4, we conclude and give a
short overview of possible future work.
2 RELATED WORK
In the context of this work, the terms scenario and
scene are used as summarized by (Steimle et al.,
2021). A scene is a snapshots of a traffic constella-
tion. A scenario is a sequence of scenes and describes
the temporal development of the behavior of different
actors within this sequence.
Finding new scenarios is a relevant step for defin-
ing new test cases to assess an automated driving sys-
tem’s safety. (Bussler et al., 2020) use evolutionary
learning to find relevant parameter sets within logical
scenarios and utilize Euclidean distance and time-to-
collision for their fitness evaluation to find more crit-
ical scenarios. Another approach proposed by (Bau-
mann et al., 2021) uses reinforcement learning com-
bined with the metrics headway and time-to-collision
to gain new test cases. Additionally, (Abeysirigoon-
awardena et al., 2019) use Bayes Optimization and
Euclidean distance to generate training scenarios for
a driving function to learn to avoid pedestrians by re-
inforcement learning. However, their work does not
produce a scenario set suitable for testing since their
approach always uses the current state of the driv-
ing function which changes over the course of the
experiments. Further, there are other approaches to
find new scenarios, e.g., extracting scenarios from
recorded data sets as shown by (King et al., 2021)
and (Zofka et al., 2015) or by experts planning and
designing scenarios from scratch.
2.1 Scenario Abstraction Levels
(Menzel et al., 2018) suggest three abstraction levels
for scenario representation. The most abstract level
of scenario representation is called functional and de-
scribes a scenario via linguistic notation using natu-
ral, non-structured language terminology. The main
goal for this level is to create scenarios that are eas-
ily understandable and open for discussion between
experts. It describes the base road network and all
actors with their maneuvers, such as a right-turning
vehicle or road crossing cyclist. The next abstraction
level is the logical level and refines the representa-
tion of functional scenarios by a detailed represen-
tation with the help of state-space variables. These
variables or parameters can, for instance, be ranges
for road width, vehicle positions, and their speed, or
time and weather conditions. The most detailed level
is called concrete and describes operating scenarios
with concrete values for each parameter in the param-
eter space. Therefore, one logical scenario can yield
many concrete scenarios, depending on the number of
variables, size of parameter ranges, and step size for
these ranges.
2.2 Bayes Optimization and Gaussian
Process
Bayes optimization (BO) proceeds by maintaining a
global statistical model of a given objective func-
tion f (x) iteratively and consists of two main steps
(Greenhill et al., 2020): The first step is the Gaus-
sian process, which is used to represent the predicted
mean µ
t
(x) and the uncertainty σ
t
(x) for each point
x of the input space, with the given set of observa-
tions D
1:t
= {(x
1
,y
1
),(x
2
,y
2
),...(x
t
,y
t
)}, where x
t
is
the process input and y
t
the corresponding output at
time t. After that, an Acquisition function is used
to evaluate the beliefs about the objective function re-
garding the input space, based on the predicted mean
µ
t
(x) and uncertainty and chooses the most promising
setting σ
t
(x).
2.3 Scenario Metrics
Scenario metrics are used to assess the quality of a
scenario regarding the aspect that needs to be eval-
uated. According to (Sch
¨
utt et al., 2021), scenario
quality can be assessed at three different levels of res-
olution: nanoscopic (a scenario segment is evaluated,
e.g., a single time step), microscopic (a complete sce-
nario is evaluated, e.g., one concrete scenario), and
macroscopic (a set of scenarios is evaluated, e.g., a
logical scenario). Before a metric for the evaluation
process is chosen, the usage, goals, and purpose of
a scenario need to be clear, e.g., (Sch
¨
onemann et al.,
2018) propose a hazard analysis and risk evaluation
to determine safety goals and show their approach on
the example of a valet parking system. The formu-
lated safety goals can be used in following steps to
choose the metrics for scenario evaluation or to deter-
mine the performance of an automated driving system
concerning its requirements.
An Application of Scenario Exploration to Find New Scenarios for the Development and Testing of Automated Driving Systems in Urban
Scenarios
339
2.4 Simulation Tools
Commercial tools for automotive simulation among
others are available from dSPACE (dSPACE, 2021),
and IPG (IPG Automotive GmbH, 2021). Both
simulation tools provide modules for map and sce-
nario creation, sensor models and dynamic models,
to name some examples. A further tool is Carla, an
open-source simulator with a growing community and
based on the game engine Unreal (Dosovitskiy et al.,
2017). It offers several additional modules, e.g., a sce-
nario tool which includes its own scenario format, a
graphical tool for creating scenarios, a ROS-bridge,
and SUMO support. SUMO is an open-source soft-
ware tool for modeling microscopic traffic simulation
from DLR (Lopez et al., 2018). It specializes on big
scale of traffic simulation and can be used for eval-
uating traffic lights cycles, evaluation of emissions
(noise, pollutants), traffic forecast, and many others.
3 DIRECTED SCENARIO
EXPLORATION
3.1 Optimization Setup
Start
parameter set
1
Simulation of
concrete scenario
2
Evaluation of
simulation results
3
Choose new
parameter set
5
Optimization
4
Termination
criterion met
6
Figure 1: Optimization workflow.
The optimization is an iterative process and is out-
lined in Fig. 1. First, a start parameter set is selected
(1), and simulated as summarized in step (2). The re-
sults are evaluated (3), a new parameter set is chosen
(5) by the optimization algorithm (4), and it is sim-
ulated again (2). This step is repeated until a termi-
nation criterion is met (6). The open-source project
common Bayesian optimization library (COMBO) is
employed in the experiments since it offers Bayesian
optimization that uses automatic hyperparameter tun-
ing, Thompson sampling as a method of picking the
next best candidate, and random feature maps for bet-
ter performance (Ueno et al., 2016). Throughout this
work, Bayesian optimization and Gaussian processes
were used. However, other optimization algorithms
might be used since the focus of this work does not
lie on the optimization itself.
3.2 Simulator Setup
The simulation tool CarMaker
1
serves as a basis for
the simulator setup (IPG Automotive GmbH, 2021).
As an open integration and test platform, CarMaker
provides a central control unit running the closed-
loop simulation. It includes all proprietary and exter-
nal models according to the given scenario and con-
straints. In this case, proprietary models of the com-
plete simulation environment comprise the road, en-
vironment and traffic models. Six external models
were integrated as FMUs (Functional Mock-up Unit)
via an extended version of the Open Simulation Inter-
face (OSI) (ASAM OSI, 2021), realizing a setup with
three sensor models (camera, lidar (Linnhoff et al.,
2021), and radar), an autonomous driving function
(see section 3.3), a motion control model and a vehi-
cle dynamics model. This simulator setup is shown
in Fig 2. The output quantities of each simulation
are handed over to the optimization setup described in
section 3.1. The next scenario to be executed is then
chosen directly by the optimization setup via script
commands, leading to the optimization workflow pic-
tured in Fig 1.
3.3 Driving Function
To calculate the trajectory of the ego vehicle, a
lightweight and highly automated driving function
is used. The function is centered around a modi-
fied, curvature-aware version of the Intelligent Driver
Model (IDM) as used in (Zofka et al., 2016), initially
introduced in (Treiber et al., 2000). To achieve a mod-
ular system, the function is implemented using the
Robot Operating System (ROS) framework (Quigley
et al., 2009). The system comprises six modules, as
shown in Fig. 3: a sensor fusion module to join the
information from the three sensors, a tracking algo-
rithm to keep track of occluded traffic participants, a
filter module to extract the relevant objects, a routing
algorithm, a localization part to create an estimate of
the own global position using odometry information,
and finally, a trajectory module, planning a trajectory
with a velocity profile.
The routing algorithm uses a high-definition map
to extract the road topology. The relevant objects
identified within the object filter are projected onto
the path of the ego vehicle. Thereby, a distance
and differential velocity can be calculated to be used
1
CarMaker from IPG Automotive in version 8.0.2
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
340
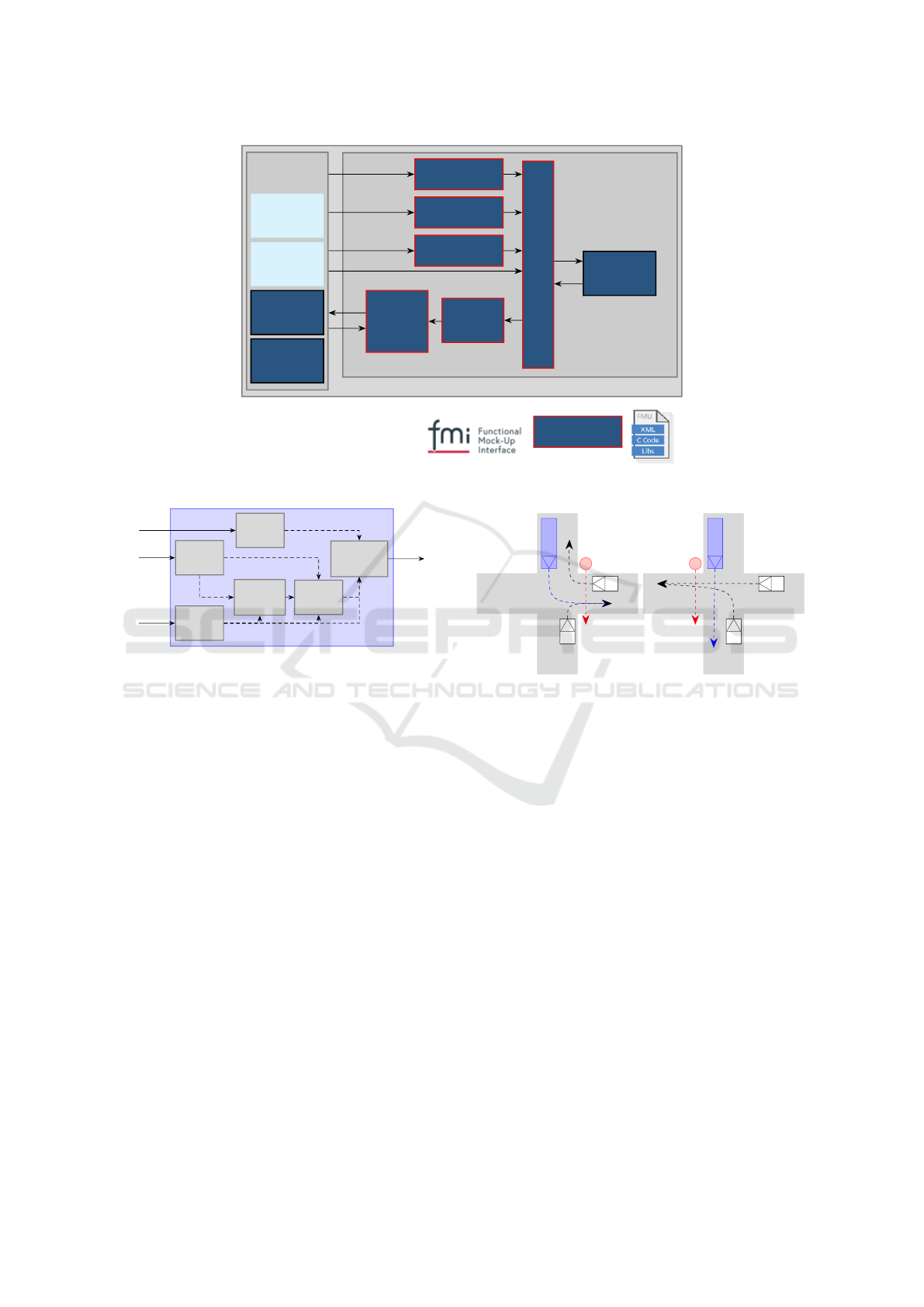
Simulation Setup
IPG
CarMaker
Simulation
Control
Logging
Engine
Traffic
Models
Environment
Models
Camera Sensor
Lidar Sensor
Radar Sensor
HAD function proxy
Motion
Control
Vehicle
Dynamics
HAD
function
Simulation Models
TCP
Model FMU
Figure 2: Modular structure of the simulation environment.
Routing
Target
Position
Sensor
Fusion
Sensor
Information
Object
Tracking
Object
Filter
Trajectory
Planning
Trajectory
Local-
ization
Odometry
Figure 3: Modular structure of the driving function.
within the IDM. Filtering is done considering the type
of an object, as well as its position relative to the road
network and the ego vehicle. Moreover, the curvature
of the path is considered by converting it to a velocity
limit using maximum lateral acceleration. This veloc-
ity limit is treated as a separate object for the IDM to
achieve smooth cornering behavior.
A gateway architecture was used to comply with
the standardized FMI/OSI interface described in sec-
tion 3.2 while maintaining the platform’s indepen-
dence. Thereby, a TCP proxy was integrated into the
simulator as an FMU. The proxy forwards the mes-
sages via TCP to the communication layer of the driv-
ing function, where the messages are then converted
into equivalent ROS messages. With this, the driving
function can be run within a docker environment.
3.4 Logical Scenario
As shown in Fig. 4, two logical intersection scenarios
are used for the experiments. Each scenario consists
of an ego vehicle (E), a pedestrian (P), a second car
(C), and a truck (T). Both scenarios vary in the ac-
tors’ starting position and maneuvers. In scenario A,
a)
T
E
C
P
b)
T
E
C
P
Figure 4: Two experimental scenarios: a) ego turns right, b)
ego turns left. C: car, E: ego vehicle, P: pedestrian, T: truck.
the ego vehicle is turning right and, therefore, crosses
the trajectories of the pedestrian and the truck but not
the car’s trajectory, whereas, in scenario B, the ego ve-
hicle is turning left and crosses the trajectories of all
three adversary traffic participants. The two scenarios
lead to different behaviors of the ego vehicle since it
reacts to other participants blocking its route. The fol-
lowing ranges were chosen as parameter ranges, for
which the optimal parameter sets have to be found
during the scenario exploration:
• Pedestrian Delay: The pedestrian waits for a
given time t
P
delay
in s before crossing the road,
where t
P
delay
∈ {0.0,...,7.0}. 50 samples with a
step size of 0.14s were taken.
• Ego Position: The ego vehicle starts at a given
s-coordinate s
E
start
in m along the road, where
s
E
start
∈ {27.99,...77.99}. 250 samples with a step
size of 0.2m were taken.
• Car Speed: The maximum speed v
C
max
that the
other car is allowed to achieve in m/s, where
v
C
max
∈ {12.5,...,30.0}. 50 samples with a step
An Application of Scenario Exploration to Find New Scenarios for the Development and Testing of Automated Driving Systems in Urban
Scenarios
341

size of 0.35m/s were taken.
This setup results in 625.000 scenarios. If each
scenario takes approximately 30 s for simulation ex-
ecution and calculation of criticality metrics, the ex-
ecution of all 625.000 scenarios takes more than 217
days of non-stop simulation on a single machine. Ad-
ditionally, the simulation time grows exponentially,
with scenarios getting more complex by additional
parameters and parameter ranges.
3.5 Optimization Problem
The goal of the scenario exploration is to find all criti-
cal scenarios involving the ego vehicle and the pedes-
trian, the most vulnerable road user (VRU) in this sce-
nario. Therefore, the criticality between the ego vehi-
cle and the pedestrian is optimized. The criticality is
measured by criticality metrics, and the optimization
aims to find scenarios evaluated to what degree they
contain a potentially critical situation. Five criticality
metrics were utilized as the objective function to be
optimized by the Bayesian optimization:
• Euclidean Distance: Direct distance between the
center of mass of two vehicles.
• Trajectory Distance: Distance between two traf-
fic participants along their trajectories and road
network.
• Worst-time-to-collision (WTTC): Metricetric
based on time-to-collision (TTC) (Hayward,
1972), but without the TTC’s limitation to car fol-
lowing scenarios (Wachenfeld et al., 2016).
• Gap Time (GT): The predicted distance in time
between the two traffic participants crossing an in-
tersection (Allen et al., 1978).
• Post-encroachment-time (PET): The actual dis-
tance in time between the two traffic participants
crossing an intersection (Allen et al., 1978).
All metrics above require to minimize their out-
put value to optimize the criticality within the logical
scenario.
3.6 Experiments and Results
All experiments evaluate the criticality of the scenario
regarding the ego vehicle and the pedestrian as the
most VRU in this scenario. Some scenarios might
lead to critical situations between the ego vehicle and
other traffic participants. However, these scenarios
are neglected. In general, different metrics cannot be
compared directly, e.g., a critical scenario in Fig 6 b)
which is indicated by a red dot is not equally critical
to a red colored scenario in Fig 6 c).
b)
a)
distance in m
distance in m
2
pedestrian delay in s
pedestrian delay in s
Scenario A
Scenario B
time in s
time in s
Euclid. Distance [m]
Trajectory Distance [m]
Gap Time [s]
PET [s]
WTTC [s]
0
0.0
2
4
6
0 1 2
2
3
3
4 5 6 7
0 1 2 3
3
4
4
5 6 7
1
2.5
5.0
7.5
10.0
0
1
Figure 5: Bayes optimization results of both scenarios on a
one-dimensional parameter space. The metrics used for op-
timization are Euclidean and trajectory distance, gap time,
post-encroachment-time, and worst-time-to-collision.
3.6.1 Experiment 1
In the first set of experiments, only the pedestrian
delay is varied and optimized throughout all simula-
tions, with a set value of s
E
start
= 60.0 m in scenario
A, s
E
start
= 67.0 m in scenario B, and v
C
max
= 15.0 m/s
in both scenarios. The results are shown in Fig. 5 a)
for scenario A and in b) for scenario B. In scenario
A, critical scenarios are found for a delay near 0.0 s,
and for all metrics except PET, there are no changes
in criticality for a delay over approximately 1.5s. Al-
though PET values change after that, scenarios are not
critical since the result is growing. Further, (Allen
et al., 1978) set the threshold for critical scenarios to
PET < 1.5 s. The used criticality metrics in scenario
B indicate no change in criticality for a varying pedes-
trian delay, and therefore, the pedestrian delay has no
influence on the outcome of scenario B for the chosen
values of the other two parameters.
3.6.2 Experiment 2
In the second setup, all three parameters are varied
and optimized as described in section 3.1 and 3.4.
The results for these experiments are shown in Fig. 6,
where a) shows results for the Euclidean distance,
b) trajectory distance, c) post-encroachment-time, d)
worst-time-to-collision, and e) gap time. In both sce-
narios, the car speed seems to have no or almost no
visible influence on simulation results regarding the
criticality of the pedestrian’s situation. Therefore, a
three-dimensional plot can be reduced to the two di-
mensions of pedestrian delay and ego s-coordinate.
However, this does not mean that there is no influence
at all, and outliers or deviations in the plot that are not
congruent with other values around them might be in-
fluenced by the car’s speed. An explanation for the
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
342

Scenario A
Scenario A
Scenario A Scenario A Scenario A
Scenario B Scenario B Scenario B Scenario B Scenario B
0
2
4
6
0
2
4
6
0
2
4
6
0
2
4
6
0
2
4
6
0
2
4
6
ego s-coordinate in m ego s-coordinate in m
ego s-coordinate in m ego s-coordinate in m ego s-coordinate in m
ego s-coordinate in m ego s-coordinate in m ego s-coordinate in mego s-coordinate in m
ego s-coordinate in m
pedestrian delay in s
0
2
4
6
40 60 80
2
1
7
6
5
3
4
2.5
2.0
4.0
3.0
3.5
2
1
7
6
5
3
4
4
2
14
12
10
6
8
4
2
14
12
10
6
8
0.4
0.2
1.0
0.6
0.8
2
1
6
5
3
4
2
1
6
5
3
4
2
1
3
4
0.2
0.1
0.6
0.5
0.3
0.4
0
2
4
6
0
2
4
6
0
2
4
6
pedestrian delay in s
pedestrian delay in s
pedestrian delay in s
pedestrian delay in s
pedestrian delay in s
pedestrian delay in s pedestrian delay in s
pedestrian delay in spedestrian delay in s
40 60 80 40 60 80 40 60 80 40 60 80
40 60 80 40 60 80 40 60 80
40 60 80
40 60 80
Euclidean Distance in m
Euclidean Distance in m
Trajectory Distance in m
Trajectory Distance in m
Post-Encroachment-Time in s Post-Encroachment-Time in s
Worst-Time-To-Collision in s Worst-Time-To-Collision in s
Gap Time in s
Gap Time in s
a)
a)
b)
b)
c)
c)
d)
e)
e)d)
Figure 6: Bayes optimization results of both scenarios on a three-dimensional parameter space. The metrics used for opti-
mization are Euclidean (a) and trajectory (b) distance, post-encroachment-time (c), worst-time-to-collision (d), and gap time
(e) and are shown in a two-dimensional space since the variable car speed has almost no influence on the scenario outcome.
Figure 7: Screenshot from a less critical scenario (left)
and critical scenario where the ego vehicle almost hits the
pedestrian (right).
lack of influence could be, that in scenario A, the ego
vehicle’s trajectory and the car’s trajectory are not in-
tersecting, and the ego has no need to react to the car.
Also, the other car is starting close to the intersec-
tion in both scenarios, it might simply not have had
enough time to accelerate until it reaches the inter-
section and always pass the ego vehicle at the same
speed.
In general, scenario A has three different out-
comes regarding the criticality of the pedestrian’s sit-
uation: the ego vehicle reaches the intersection and
stops for the pedestrian who is crossing the street.
This result can be observed in scenarios at the bot-
tom left corner in Fig. 6 a)-e) where the criticality de-
creases for most metrics. The second result consists
of the ego vehicle passing the intersection before the
pedestrian or the truck, which are mostly scenarios at
the top half and right half in Fig 6 a)-e). The last vari-
ant are scenarios where the ego vehicle reaches the
intersection right after the truck and, therefore, can-
not see the pedestrian. These scenarios are the criti-
cal scenarios around the diagonal near the bottom left
corner in Fig. 6 a)-e).
In scenario B, the ego vehicle not only reacts to
the pedestrian and the truck but also the other car. The
outcomes of scenario B are the same as in scenario A.
However, they are distributed differently over the pa-
rameter space: the less critical area in the bottom left
corner, which can be clearly observed in Fig. 6 b) and
d) results from a parameter set, where the ego vehicle
intersects the pedestrian’s path after they crossed the
road. The left part of Fig. 7 shows a screenshot of this
situation taken during the simulation. On the right
side, where the s-coordinate has its highest value, the
ego vehicle passes the intersection before the pedes-
trian, followed by a critical line around 70 m with
near-collisions. In the middle and left part of the s-
coordinate, the ego vehicle waits for the pedestrian to
pass, and the critical cluster at delay 2 s results from
interference with the truck.
The comparison of the results of both scenarios
leads to the following conclusions:
• Scenario A has a higher variance in criticality than
scenario B,
• car speed has no recognizable influence in sce-
nario A and almost no influence in B,
• some metrics are more sensitive, e.g., trajectory
distance and gap time, and
• some metrics lead to similar patterns in criticality,
e.g., bottom left corner in scenario A or scenar-
ios with a small ego vehicle s-coordinate in sce-
nario B.
3.6.3 Experiment 3
In the third setup, the pedestrian delay t
P
delay
is re-
placed by a new variable y
C
start
to see if the car speed
has more influence on the scenario outcome:
• Car Position: The y-coordinate y
C
start
in m fulfils
An Application of Scenario Exploration to Find New Scenarios for the Development and Testing of Automated Driving Systems in Urban
Scenarios
343

Scenario B
car speed in m/s
15
30
25
20
80
60
40
ego s-coordinate
in m
20
30
40
50
car y-coordinate in m
Post-Encroachment-Time in s
8
7
6
5
3
4
Figure 8: Exemplary Bayes optimization results of scenario
B on a three-dimensional parameter space for the metric
post-encroachment-time.
y
C
start
∈ {15.0, ..., 50.0}. 50 samples with a step
size of 0.7m were taken.
All three variables are varied and optimized, and the
five previously mentioned metrics are used. The re-
sults for scenario A do not show any influence of the
car’s speed or y position on the outcome. This is not
surprising since there is no trajectory intersection be-
tween the ego vehicle and the car. The results show,
the outcome only depends on the s-coordinate. As
Fig. 8 shows, in scenario B the ego s-coordinate still
has the most influence on the outcome. However, in
some areas in the parameter space car speed and y-
coordinate also affect the scenario criticality.
3.7 Results
In our experiments, we could show that even though
different metrics were used, they led to similar crit-
ical scenario clusters although, these metrics are not
comparable in the severity of the measured criticality
and their sensitivity. Moreover, our approach led to a
reduction of the amount of necessary simulation: in-
stead of executing more than half a million scenarios,
only about 430 were executed in experiments 2 and
3, respectively. Additionally, we were able to show
that the variable car speed has no influence in sce-
nario A and can be neglected to reduce the number of
scenarios or replaced by another variable with more
influence.
4 CONCLUSION AND FUTURE
WORK
In this work, we used an optimization algorithm to
find critical scenarios for the develoing and testing
of automated and highly automated driving systems.
Bayes optimization with Gaussian process was uti-
lized in combination with five criticality metrics from
the automotive domain to calculate the process out-
put. This approach was used in two different experi-
ments and evaluated accordingly.
Derived from the evaluation of the experiments
and the results of this work, additional questions arise.
Results of the same scenario, models, criticality met-
rics, and the same driving function could be used
by different simulation tools and compared regard-
ing their deviation. Furthermore, it is harder to mea-
sure criticality for other scenarios, i.e., scenarios with
more traffic participants. Our experiments only fo-
cused on criticality metrics between the ego vehicle
and the most VRU, the pedestrian. However, such a
choice might not always be obvious or changing dur-
ing one scenario, e.g., in urban rush hour traffic with a
high density of traffic participants. Metrics to evaluate
the relation between the ego and more than one adver-
sary traffic participant or the whole scenario situation
are needed to make more objective conclusions. In
future work, the problem of finding more objective
metrics for scenarios will be approached to be able to
find critical situations between the ego vehicle and the
sum of all other traffic participants.
ACKNOWLEDGEMENTS
This research is funded by the “Simulations-
basiertes Entwickeln und Testen von automatisiertem
Fahren (SET Level)-Simulation-Based Development
and Testing of Automated Driving,” a succes-
sor project to the project “Projekt zur Etablierung
von generell akzeptierten G
¨
utekriterien, Werkzeu-
gen und Methoden sowie Szenarien und Situatio-
nen zur Freigabe hochautomatisierter Fahrfunktionen
(PEGASUS)” and a Project in the PEGASUS Family,
promoted by the German Federal Ministry for Eco-
nomic Affairs and Energy (BMWi) under the grant
number 19 A 19004.
REFERENCES
Abeysirigoonawardena, Y., Shkurti, F., and Dudek, G.
(2019). Generating adversarial driving scenarios in
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
344

high-fidelity simulators. In 2019 International Con-
ference on Robotics and Automation (ICRA), pages
8271–8277. IEEE.
Allen, B. L., Shin, B. T., and Cooper, P. J. (1978). Analysis
of traffic conflicts and collisions. Technical report.
ASAM OSI (2021). ASAM OSI
R
(Open Simulation Inter-
face). Accessed: Dec. 15, 2021.
Bach, J., Otten, S., and Sax, E. (2016). Model based sce-
nario specification for development and test of auto-
mated driving functions. In 2016 IEEE Intelligent Ve-
hicles Symposium (IV), pages 1149–1155. IEEE.
Baumann, D., Pfeffer, R., and Sax, E. (2021). Auto-
matic generation of critical test cases for the devel-
opment of highly automated driving functions. In
2021 IEEE 93rd Vehicular Technology Conference
(VTC2021-Spring), pages 1–5. IEEE.
Bussler, A., Hartjen, L., Philipp, R., and Schuldt, F. (2020).
Application of evolutionary algorithms and critical-
ity metrics for the verification and validation of auto-
mated driving systems at urban intersections. In 2020
IEEE Intelligent Vehicles Symposium (IV), pages 128–
135. IEEE.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
dSPACE (2021). SIMPHERA - Web-based solution for
simulation and validation in autonomous driving de-
velopment. Accessed: Jan. 19, 2022.
Gartner (2021). Top strategic technology trends
for 2022. https://www.gartner.com/en/information-
technology/insights/top-technology-trends. Accessed:
2021-10-25.
Greenhill, S., Rana, S., Gupta, S., Vellanki, P., and
Venkatesh, S. (2020). Bayesian optimization for adap-
tive experimental design: A review. IEEE Access,
8:13937–13948.
Hayward, J. C. (1972). Near miss determination through
use of a scale of danger. In Unknown. Publisher:
Pennsylvania State University University Park.
IPG Automotive GmbH (2021). CarMaker. Accessed: Dec.
20, 2021.
King, C., Braun, T., Braess, C., Langner, J., and Sax, E.
(2021). Capturing the variety of urban logical sce-
narios from bird-view trajectories. In VEHITS, pages
471–480.
Linnhoff, C., Rosenberger, P., and Winner, H. (2021). Re-
fining object-based lidar sensor modeling — challeng-
ing ray tracing as the magic bullet. IEEE Sensors Jour-
nal, 21(21):24238–24245.
Lopez, P. A., Behrisch, M., Bieker-Walz, L., Erdmann, J.,
Fl
¨
otter
¨
od, Y.-P., Hilbrich, R., L
¨
ucken, L., Rummel, J.,
Wagner, P., and Wießner, E. (2018). Microscopic traf-
fic simulation using sumo. In The 21st IEEE Interna-
tional Conference on Intelligent Transportation Sys-
tems. IEEE.
Menzel, T., Bagschik, G., and Maurer, M. (2018). Scenarios
for development, test and validation of automated ve-
hicles. In 2018 IEEE Intelligent Vehicles Symp. (IV),
pages 1821–1827. IEEE.
Otten, S., Bach, J., Wohlfahrt, C., King, C., Lier, J., Schmid,
H., Schmerler, S., and Sax, E. (2018). Automated
assessment and evaluation of digital test drives. In
Advanced Microsystems for Automotive Applications
2017, pages 189–199. Springer.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A. Y., et al. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, page 5.
Kobe, Japan.
Sch
¨
onemann, V., Winner, H., Glock, T., Otten, S., Sax, E.,
Boeddeker, B., Verhaeg, G., Tronci, F., and Padilla,
G. G. (2018). Scenario-based functional safety for
automated driving on the example of valet parking.
In Future of Information and Communication Confer-
ence, pages 53–64. Springer.
Sch
¨
utt, B., Steimle, M., Kramer, B., Behnecke, D., and
Sax, E. (2021). A taxonomy for quality in simulation-
based development and testing of automated driving
systems. arXiv preprint arXiv:2102.06588.
Steimle, M., Menzel, T., and Maurer, M. (2021). To-
wards a consistent terminology for scenario-based de-
velopment and test approaches for automated vehi-
cles: A proposal for a structuring framework, a ba-
sic vocabulary, and its application. arXiv preprint
arXiv:2104.09097.
Treiber, M., Hennecke, A., and Helbing, D. (2000). Con-
gested traffic states in empirical observations and mi-
croscopic simulations. Phys. Rev. E, 62:1805–1824.
Ueno, T., Rhone, T. D., Hou, Z., Mizoguchi, T., and Tsuda,
K. (2016). Combo: an efficient bayesian optimiza-
tion library for materials science. Materials discovery,
4:18–21.
Wachenfeld, W., Junietz, P., Wenzel, R., and Winner, H.
(2016). The worst-time-to-collision metric for situa-
tion identification. In 2016 IEEE Intelligent Vehicles
Symposium (IV), pages 729–734. IEEE.
Zofka, M. R., Kuhnt, F., Kohlhaas, R., Rist, C., Schamm, T.,
and Z
¨
ollner, J. M. (2015). Data-driven simulation and
parametrization of traffic scenarios for the develop-
ment of advanced driver assistance systems. In 2015
18th International Conference on Information Fusion
(Fusion), pages 1422–1428. IEEE.
Zofka, M. R., Kuhnt, F., Kohlhaas, R., and Z
¨
ollner, J. M.
(2016). Simulation framework for the development of
autonomous small scale vehicles. In 2016 IEEE In-
ternational Conference on Simulation, Modeling, and
Programming for Autonomous Robots, SIMPAR 2016,
San Francisco, CA, USA, December 13-16, 2016,
pages 318–324.
An Application of Scenario Exploration to Find New Scenarios for the Development and Testing of Automated Driving Systems in Urban
Scenarios
345
