
Modeling the Dynamic Reconfiguration in Smart Crisis Response
Systems
Akram Seghiri
1,2 a
, Faiza Belala
1
and Nabil Hameurlain
2 b
1
LIRE Laboratory, University of Constantine 2 - Abdelhamid Mehri, Constantine, Algeria
2
LIUPPA Laboratory, University of Pau, Pau, France
Keywords:
Smart Systems-of-Systems, Architecture Description Language, Dynamic Reconfiguration, Maude Strategy
Language.
Abstract:
Crises response systems form the majority of today’s complex systems; they generate situations characterized
by harmful consequence, low probability, and short decision time. The decision-making in these systems
constitute a challenging issue and must be conscientiously supported. The aim of this paper is twofold, we
derive a referential architecture for crisis response system-of-systems in one hand, the role of communication
and the characteristics of constituent systems that are needed to adapt their dynamic behavior are added to the
architecture standard of IEEE. In the other hand, we define a formal model on the basis of the Maude Strategy
language, to deal with the dynamic reconfiguration of these system types.
1 INTRODUCTION
1.1 Context and Problematic
Crises response systems form the majority of today’s
complex systems; they generate situations character-
ized by harmful consequence, low probability, and
short decision time. The crisis response in general
constitutes a challenging issue and must be conscien-
tiously supported. It involves multiple parties, each
with their own autonomy and capabilities, leading
to differentiations in structure, goals, strategies, and
constraints for cooperation (Van Veelen et al., 2008).
Therefore, a crisis response system needs to support
distributed and continuous adaptation due to unpre-
dictable changes in goals and plans for the current cri-
sis management organization. Different approaches
to adaptation and (re-)configuration have to be inte-
grated for dynamically structuring, configuring, and
re-configuring organizations to comply with actual
goals and agreements on plans in crisis management
conditions.
On the other hand, Systems of Systems (SoS), are
a set of independently developed systems that inter-
act to achieve a specific goal, known as an SoS mis-
sion, which neither of them can solely achieve. They
a
https://orcid.org/0000-0002-1760-1932
b
https://orcid.org/0000-0003-3311-4146
are distinguished from large monolithic systems by a
set of eight key ‘dimensions’ of SoS (Nielsen et al.,
2015): autonomy, independence, distribution, evolu-
tion, emergent behavior, dynamic behavior, interde-
pendence and interoperability. Besides these dimen-
sions, we also observe geographic distribution as a re-
current feature for SoS (Nielsen et al., 2015). They
have been classified by the level of managerial con-
trol.
This systems type is being more used in various
emerging concepts and technologies, such as Inter-
net of Things or Cyber-Physical Systems. Thus, there
is a constant need for a SoS to be more reactive, to
have an adaptive manner, and to be widely recon-
figurable. This gave birth the concept of Smart SoS
(SSoS). SSoS are particular SoS that inherit their ba-
sic characteristics, but also have the ability to be re-
configured dynamically in order to respond to exter-
nal events that may affect them, and achieve an SoS
mission, as a response to these multiple events. These
events may happen concurrently and in parallel, and
an SSoS should be able to handle this parallelism.
This is done through a set of actions, which are de-
fined as three key operations: (1) dynamic communi-
cation links between these systems (2) a combination
of their functions to achieve a new function that nei-
ther of them can obtain on its own (3) a mobility on
the SoS, by adding, removing or replacing its con-
stituent systems.
162
Seghiri, A., Belala, F. and Hameurlain, N.
Modeling the Dynamic Reconfiguration in Smart Crisis Response Systems.
DOI: 10.5220/0011069300003176
In Proceedings of the 17th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2022), pages 162-173
ISBN: 978-989-758-568-5; ISSN: 2184-4895
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

1.2 Objective
A Smart Crisis Response SoS (SCRSoS) is one of the
possible SSoS. It has the goal of crisis management,
and regroups a set of independent systems that should
cooperate to realize this goal, despite being fully au-
tonomous, independent and heterogeneous complex
systems. Thus, the SoS approach is justified by their
ability to respond to a crisis that neither of them can
manage on its own. Considering different crisis as ex-
ternal events, that have short decision time and most
of the time may happen without notice, the need of
smart systems that react to these events is essential.
They need to be dynamically adaptive and mobile in
order to have emerging behaviours. Thus, reconfigur-
ing their components and natures is vital; they ought
to interact by being linked together and combining
their functions to achieve SoS missions. Systems in
SCRSoS have a hierarchy in which, despite belonging
to a specific SoS and realizing common goals, con-
stituent systems still maintain their independent and
managerial autonomy, and their own evolutionary na-
ture. SCRSoS has an unpredictable nature, as deci-
sion making on how systems contribute depends on
many factors:
• External events triggering different type of be-
haviours from concerned constituent systems.
• Behavioural constraints prohibiting some systems
from interacting on specific events, or from shar-
ing some of their functions with other specific sys-
tems.
By having these factors, we can achieve SoS missions
in an autonomous way, defined as an event trigger-
ing certain interactions (links) between specific con-
stituent systems, then they combine some of their
roles in order to respond to that event, ensuring co-
herence by not violating behavioural constraints.
In order to design SCRSoS, and to execute and sim-
ulate its behaviours and reconfigurations, a formal
model is needed. This model should be enough
generic, thus it will be inspired from a reference
architecture derived from the ISO/IEC/IEEE 42010
standard (ISO/IEC/IEEE, 2011) and also based on
ArchSoS, an existing Architecture Description Lan-
guage (ADL) dedicated to SoS software architectures.
Maude is used to specify, implement and execute this
model. The aim of this paper is twofold, we derive
a referential architecture for crisis response system-
of-systems in one hand, the role of communication
and the characteristics of constituent systems that are
needed to adapt their dynamic behavior are added to
the architecture standard of IEEE. In the other hand,
we define a formal model on the basis of the Maude
Strategy language, to deal with the dynamic recon-
figuration of these system types. Besides, this model
is very appropriate to formally analyse some relveant
properties of Smart-SoS.
1.3 Related Work
There have been few approaches in the literature deal-
ing with the formal description and analysis of Smart
and reconfigurable SoS. Among these works, we are
interested in the study of the following three contribu-
tions, allowing to situate our own.
Authors in (Nielsen and Larsen, 2012) proposed
an extension of VDM-RT formalism to enable the
modeling of evolving SoS, their constituents, and
communication channels that can be added and re-
moved at runtime. It was applied on an intelligent Ve-
hicle Monitoring SoS aiming to improve road safety.
Similarly, the work of (Oquendo, 2016) has pro-
posed an ADL, known as SosADL and based on Π-
calculus. It focused on how organizing the interac-
tions among an SoS constituent systems to enable
the emergence of SoS-wide behaviors derived from
local behaviors. Also, this work has been extended
and enhanced to cover two SoS application examples:
(1) an urban river monitoring SoS illustrating self-
organizing architectures (Oquendo and Legay, 2015),
and (2) an IoV Internet of Vehicles serving as a sup-
port to describe an SoS-based exogenous approach
(Oquendo, 2019).
On the other hand, in (Chaabane et al., 2019),
authors adapted the standard “ISO/IEC/IEEE 42010:
systems and software engineering-architecture de-
scription” and improved it to support SoS software
architectural description. They evaluated their pro-
posal with the Goal-Question-Metric (GQM), as an
effectiveness check. The approach was used to model
a Smart City SoS dealing with structural, behavioral
and requirements aspects.
In our previous work, we have defined ArchSoS
language, as an ADL dedicated to software architec-
tural description of SoS. Its originality lies in the fact
that, its syntax being textual or graphical, is inspired
from Bigraphical Reactive Systems (Milner, 2009)
and its operational semantics is based on rewriting
theories (Meseguer, 1996). Then, obtained ArchSoS
models are naturally executed and analyzed through
Maude system (Clavel et al., ) (McCombs, 2003). In
this paper, we propose to extend ArchSoS in order
to deal explicitly with the principle of reconfigura-
tion in SoS, as well as their formal analysis. Indeed,
Smart SoS constituent systems have unpredictable be-
haviours, as they are constantly evolving and have to
coordinate and interact to accomplish global missions
Modeling the Dynamic Reconfiguration in Smart Crisis Response Systems
163

depending on the events occurring.
1.4 Paper Organization
The reminder of this paper is organized as follows:
Section 2 motivates our case study, which is the SCR-
SoS, Section 3 defines reconfigurations in ArchSoS
using a referential architecture inspired from an IEEE
standard. Section 4 gives a review of Maude and its
strategy language extension. Section 5 gives a for-
mal model, centred on Maude strategies, to describe
Smart SoS reconfigurations. It is executed by apply-
ing strategies concerning SCRSoS behaviours and its
various events. Section 6 gives a formal analysis of
some SoS relevant properties. Finally, we conclude
the paper with some remarks in Section 7.
2 MOTIVATING EXAMPLE:
SMART CRSoS
The Smart Crisis Response SoS (SCRSoS) is an SoS
resulting from the collaboration of many other SoS.
These latter collaborate in order to deal with bigger
crisis and disasters that neither of them can maintain
on its own. The main goal of having a SCRSoS is
to reduce the element of surprise after having a cri-
sis or disaster, resulting in less reaction time needed
to provide immediate assistance, warnings and evac-
uation. By having a responsive and reconfigurable
Smart SoS, several solutions to preserve human life
and keep the damage to the minimum. This may
be found and obtained via the cooperation of con-
stituent systems. In this work context, SCRSoS is
specified using the ArchSoS langage, more appropri-
ate to model the structure of such complex systems
and their behaviours. Figure 1 illustrates this descrip-
tion. We have SCRSoS and all the systems it contains,
followed by two abstraction levels using:
• Format: It contains all the systems belonging to
an SoS; alongside their corresponding types (SoS
or atomic Sub-System) using ’Systems Type’ tag,
followed by the hierarchic structure of the systems
inside an SoS, which is given using the ’parent of’
tag to define a belonging relation.
• Content: It is divided into :
– Roles: To each atomic sub-system is attached
a role defining its basic and independent func-
tion. Systems may combine their roles in order
to have a new role for the SoS.
– Behavioural Constraints: A set of conditions
that need to be satisfied when dealing with
an SoS dynamics and evolution of constituent
systems. We note that these constraints differ
from one SoS to another, and they are divided
into two type of constraints: (1) Incompatible
Links: a set of constraints to indicate that
some systems cannot communicate with each
other. We note the communication between
systems as a link, which has three possible
types: a: Authority link, u: Usage link, e:
data Exchange link. The constraint has the
syntax: ∼Link (Surveillance, Health, Fire, a).
It states that two SoS Surveillance and Health
cannot be linked with a link of type ’a’ in
case of a Fire event. (2) Incompatible Roles:
states the illegal role combinations between
constituent systems, it is noted: ∼[(DiseaseM:
Disease Management), (Evacuation: Evacua-
tion and crowd control)], it states that the roles
DiseaseM and Evacuation, corresponding to
Disease Management and Evacuation and
crowd control respectively, cannot be com-
bined together.
– Missions: a mission is the main goal of an
SoS, and a desired behaviour that is achieved by
combining different roles belonging to specific
linked systems, according to specific events.
For instance, the FireDistinguish mission has
three possible events, Fire, FireApperance and
Firesignal, to each event is associated a respec-
tive link stating the systems that are linked in
response to this event. The mission is achieved
when SCRSoS has the specific role combina-
tion of these linked systems.
As an example of missions and events in SCRSoS, we
define two possible scenarios of two different crisis
occurring at the same time. SCRSoS has to be recon-
figured in order to respond to the events and achieve
corresponding missions: FireDistinguish and Hurri-
caneEvacuation. The two corresponding scenarios
are described in Table 1, that shows affected SoS with
due to events, and specific constituent systems being
reconfigured. In this example, This leads two dis-
tinct missions of SCRSoS are achieved. We notice
that multiple reconfigurations are needed, to respond
to external events that may happen at the same time.
For instance, in order to achieve the FireDistinguish
mission, SCRSoS needs to respond to three sequential
events, which are FireApperance, FireSignal and Fire.
The concerned constituent systems are linked depend-
ing on the event, and their roles are combined in order
to produce emergent roles indicating that the mission
is achieved. Through these two concurrent scenarios
of SCRSoS, we tackle two main challenges that may
ENASE 2022 - 17th International Conference on Evaluation of Novel Approaches to Software Engineering
164
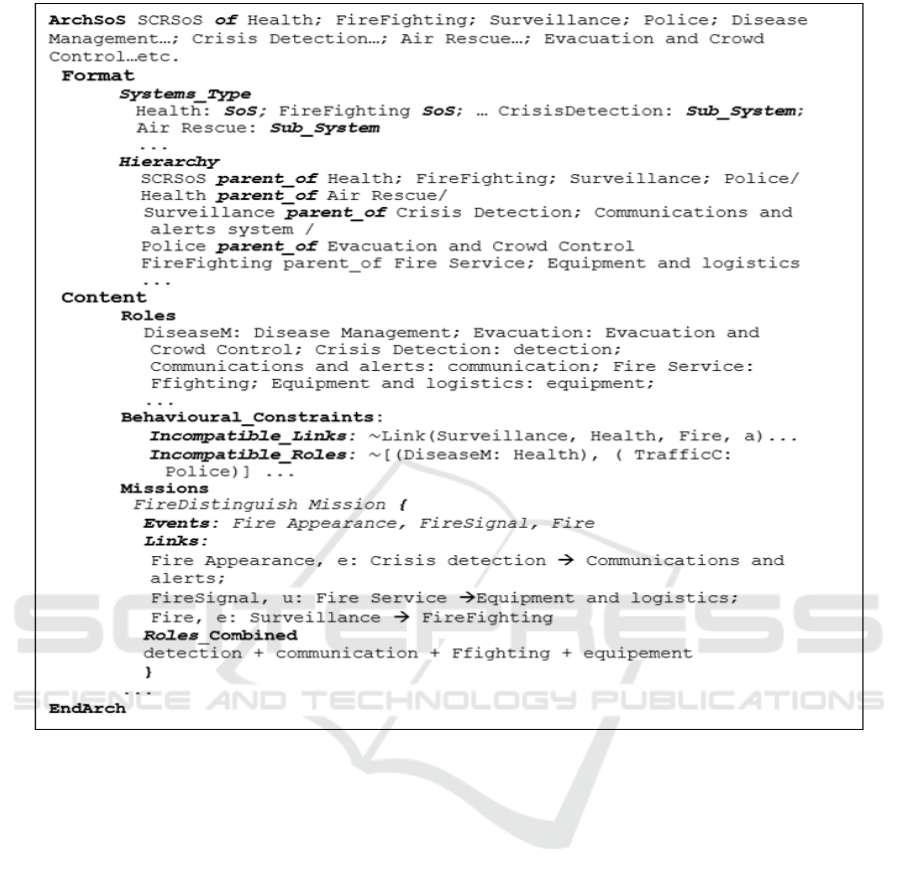
Figure 1: ArchSoS description of SCRSoS.
occur when having multiple events at the same time:
• SCRSoS may be reconfigured and deal with par-
allel events without affecting each other.
• SCRSoS may be reconfigured in oder to respond
to a specific disaster and crisis before others, de-
pending on their gravity or their response or-
der, for instance FireAppearance event need to
be dealt with before the FireSignal event, and the
Fire event should follow after. Another example
would be that the Fire event should be prioritized
over the Hurricane event, because naturally a fire
needs a faster response than a hurricane that takes
times to strike.
3 MODELING SMART SoS IN
ArchSoS
We adapt ArchSoS definition to the ISO/IEC/IEEE
42010 standard, as an architectural reference to de-
scribe SCRSoS structures, and constraint its be-
haviours. This standard has a conceptual model repre-
senting the notions of systems, components, and their
environment. It contains an architectural description
of a system architecture, represented by architectural
views and architectural models. These models are
built according to specific formalisms and notations.
However, this standard needs to be adapted in order
to address SoS characteristics and their challenges.
Thereby, allowing the definition of SoS models in ac-
cordance to this standard.
Authors in (Chaabane et al., 2019) adapted the
ISO/IEC/IEEE 42010 standard and improved it to
deal with SoS by replacing the system of interest as-
Modeling the Dynamic Reconfiguration in Smart Crisis Response Systems
165

Table 1: SCRSoS Scenarios.
Event Affected
SoS
Reconfigured Systems
Scenario 1 : FireDistinguish Mission
Fire-
Appearance
Surveillance Crisis detection
system + Communica-
tions and alerts system
FireSignal FireFighting Fire Service system +
Equipment and logis-
tics system
Fire SCRSoS Surveillance SoS +
FireFighting SoS
Scenario 2 : HurricaneEvacuation Mission
Hurricane-
Appearance
Surveillance Crisis detection
system + Communica-
tions and alerts system
Hurricane-
Signal
Police Evacuation and crowd
control system + Traf-
fic control system
Hurricane SCRSoS Surveillance SoS +
Police SoS
pect of the metric with a constituent systems entity,
linked to a system-of-systems entity. In a similar way,
we extend this standard by replacing the system of in-
terest with a Smart SoS entity containing other Arch-
SoS entities and elements. We also introduce the abil-
ity to reconfigure Smart SoS architectures, and the ar-
chitectural models. Figure 2 illustrates this extension
(blue rectangles).
The architecture description is the key element of
the standard conceptual model, it identifies three ele-
ments (1) the stakeholders, which are the most inter-
ested entities in a system, such as developers, main-
tainers, and mostly a designer that defines an SoS
structure and constraints in ArchSoS. He may also
trigger events to simulate SoS behaviours. (2) The
concerns, representing the purpose of a system and
its potential achievement, its implemention feasibil-
ity and its capacity to evolve. It represents the SCR-
SoS missions. (3) The systems of interest exhibiting
this architecture, which are in our case SSoS. They
are supposed to have their complexity reduced while
having a high abstract software description.
Stakeholders and concerns are identified by an ar-
chitecture description of an SSoS entity architecure.
A SSoS is composed by of SSoS, and of other sub-
systems entity, delimiting atomic systems that have
no constituent systems. Both SSoS and sub-systems
can be linked to other SSoS or sub-systems respec-
tively, and they may contain roles that can be com-
bined. We note that links and role combinations are
constrained by the SCRSoS behavioural constraints
An architectural view is composed of architecture
models, governed by model kinds. In our case, we
adapt Maude models as an executable rewrite theory
of SSoS. Maude’s strategy language offers additional
specifications and control over the Maude model exe-
cution.
SoSs are known by their evolutionary nature; ei-
ther on the structural level by changing the SoS hier-
archy and its actual constituent systems, or on the be-
havioural level by defining dynamic interactions and
collaborations between them, leading to flexible re-
configurations. This evolutionary nature makes it dif-
ficult to capture SoS behaviours, and how they are
conducted relatively to external events that may occur.
We should specifiy how SoS missions are achieved,
in a coherent and autonomous way. This is the case
of Smart SoS; no central control on their evolution.
Smart SoS have autonomous constituent systems that
can adapt to external events, and evolve to fulfil an
SoS mission.
This paper addresses this challenging issue, by in-
vestigating and focusing on SoS reconfigurations. It
defines a formal approach to guide and constrain SoS
behaviours. We use a Maude extension, known as
the Maude strategy language (Mart
´
ı-Oliet et al., 2009)
(Rubio et al., 2022) to define deterministic behaviours
of SoS in ArchSoS, as there is no control on how
Maude rewrite theories are executed. This will ensure
that the SCRSoS constituents can be reconfigured ac-
cording to specific events, in order to achieve the SoS
missions.
4 MAUDE STRATEGY
LANGUAGE REVIEW
Maude (Clavel et al., ) (McCombs, 2003) is a lan-
guage that implements rewriting logic, as formal se-
mantic framework. It allows the definition of con-
current computations of complex systems, consider-
ing the following two aspects:
• The structural aspect using a mathematical set of
equations defining the syntax of the system.
• The dynamic aspect using rewrite rules, that from
an initial state Si, make a transition to a next state
Sj, thereby changing the general behavior of the
system.
The main unit of programming and specifying in
Maude language is a module. We distinguish two
types of modules in the standard Maude: (1) a Func-
tional module, which uses equational logic, defining
the syntactic structure of a system, (2) a System mod-
ule, to define a system dynamic evolution, as an ap-
plication of rewrite rules that can be conditioned. The
ENASE 2022 - 17th International Conference on Evaluation of Novel Approaches to Software Engineering
166
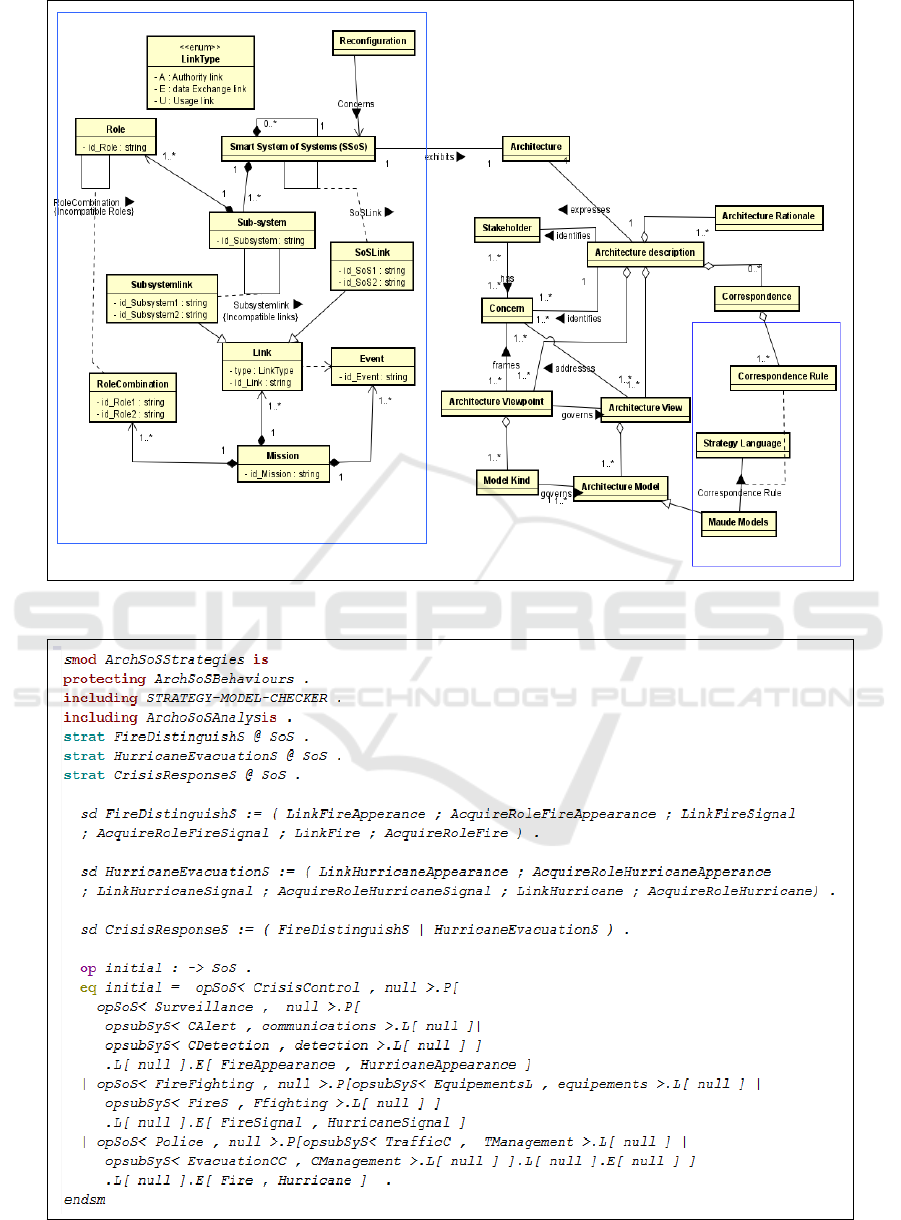
Figure 2: Extending ArchSoS according to the ISO/IEC/IEEE 42010 standard.
Figure 3: SCRSoS Strategy module.
Modeling the Dynamic Reconfiguration in Smart Crisis Response Systems
167

usage of both these modules covers both the structural
and behavioural aspects of a system.
Maude modules extensions may be defined to
make its specifications more expressive. For instance,
we may cite Object-Oriented Maude (Clave et al.,
2000) which models systems as a multiset of entities
represented as objects with unique identities, com-
municating with message passing. Real Time Maude
(
¨
Olveczky and Meseguer, 2007) is another Maude ex-
tension used to define real-time/embedded systems,
equipped with timed rewriting for simulations.
In this paper, we are interested by Maude’s strat-
egy language that separates between rewrite rules of
a Maude system module, and their rewrite guidance
using strategies. This language has its own opera-
tional semantics, allowing the manipulation of strate-
gies without the need of being familiar with the reflec-
tive concepts of Maude META-LEVEL module. It
defines internal strategies as rewrite rules (Mart
´
ı-Oliet
et al., 2009) (Rubio et al., 2022). By using Maude’s
strategy language, we can associate to each Maude
system module a strategy module that contains strat-
egy expressions defining the number, type, and order
of executing rewrite rules. Thus, the semantic of a
system does not only depend on the system module
itself, but also on its defined set of strategies. The
syntax of a strategy module is given by the Figure 4,
that we will detail in the following :
• Strategy module declaration is achieved with the
keyword ’smod’. It contains a set of strategies,
they concern a specific Maude system module de-
signed by the protecting tag. The module itself
can use and import other strategy modules using
the including tag.
• Strategy declaration is decklared by the keyword
’strat’. It contains two arguments : the identifier
of the strategy (S1, S2 in figure 4), and the sort
that is affected by this strategy.
• Strategy definition is also possible using the
sd(strategy definition) or the csd(conditional strat-
egy definition) tags, the latter defines a strategy
that is applied only when a condition is fulfilled.
This strategy definition may have the following
syntax :
sd strategy identi f ier := Expression
csd strategy identi f ier := Expression i f Condition
Expressions are a set of terms defining how ex-
actly rewrite rules are applied.
In Maude strategy language, a possible execution in-
volving the strategy concept is done via the following
command:
srew Term using S1
Figure 4: A Strategy Module syntax.
where Term represents a state of a system, and S1 is
the used strategy to rewrite this state term.
The Maude strategy language also offers the pos-
sibility to organize the execution of strategies and
their rewrite rules, giving a priority to certain ones
above the others, and constraining how they should
be executed according to a set of operators. The main
operators are summarized in Table 2 .
We have to notice that in the operator ”;”, the sys-
tem is constrained to run all rules of the strategy S1
before being able to run the rules of S2. If the order
of the rules is inversed (noted S2; S1), then S2 is exe-
cuted first and S1 follows next, if it is possible to run
it after S2. This offers the possibility to force a sys-
tem to have an execution pattern where critical rules
should always be applied.
The operator ”|” constraints the system to run (if
possible) S2 even if S1 cannot be executed. However,
when the rewriting occurs, S1 has a priority over S2
(the opposite way when they are inversed). The se-
mantic of an SoS using this operator offers possibility
to order the execution according to the importance of
the system’s behaviours.
5 RECONFIGURATION FORMAL
MODEL FOR SSoS
In this Section, we show how we associate a strategy-
based rewrite theory to define the structural and be-
havioural aspects of SCRSoS. We are particularly in-
terested by specifying the reconfiguration manage-
ment using a set of proposed strategies. Formally, our
model using the strategy language has the following
definition:
de f
ArchSoS
= {Σ
ArchSoS
,(E ∪ A)
ArchSoS
,S
ArchSoS
(R
ArchSoS
,SM
ArchSoS
)}
It describes SoS architectures expressed in Arch-
SoS, while specifying their semantics via a set of
Maude strategy modules :
ENASE 2022 - 17th International Conference on Evaluation of Novel Approaches to Software Engineering
168
Table 2: Strategy Language Operators.
Operator Syntax Functionality
; sd Strategy0 := S1, S2 Concatenation (Associative )
| sd Strategy0 := S1 | S2 Union (Associative and Commuta-
tive)
* sd Strategy =: (. . . . . . )* At least 0 iteration
+ sd Strategy =: (. . . . . . )+ At least 1 iteration
! sd Strategy =: (. . . . . . )! All iterations
Table 3: Correspondance table between ArchSoS aspects and Maude.
Aspect ArchSoS entities Maude specification
ArchSoS Syntax
SoS,
Sub-Systems
and events
sort SoS idSoS.
subsort subSyS < SoS .
sort Event .
op opSoS < , > .P[ ].L[ ].E[ ] :
IdSoS Role SubSyS Link Event → SoS [ctor] . op null : → SoS
[ctor] .
op | : SoS SoS → SoS [ctor assoc comm id: null] .
sort IdSubsystem .
op opsubSyS < , > .L[ ] :
IdSubsystem Role Link → subSyS [ctor] .
op | : subSyS subSyS → subSyS [ctor assoc comm id: null] .
Roles sort Role .
op ”RoleName” → Role [ctor].
op null : → Role [ctor] .
op + : Role Role → Role [ctor assoc comm id: null] .
Links sorts Link LinkT.
op link < : ; → > :
Event LinkT IdSoS IdSoS →Link [ctor] .
op a : → LinkT [ctor] .
op u : → LinkT [ctor] .
op e : → LinkT [ctor] .
Events sort Event (sort inside the opSoS construct).
ArchSoS Semantic
Control Predicates φ
i
Maude Conditional Equations:
IsActive(SoS), CompRoles(Rolei, Rolej), NoComp(SoS),
isLinked(Subsystemi), areLinked (Subsystemi, Subsystemj),
PosLink(Subsystemi,Subsystemj,Event, LinkT), NoClinks(Si),
CanAdd(SoS,SubSystemi) CanRemove(SoS,SubSystemi) .
Action Maude Conditioned Rewrite Rule
crl [rewrite-rule-name] : State
i
→ State
j
if φ
i
.
Mission Strategy definition S
i
Reconfiguration Strategies and rewrite rules combination using operators .
Verification Property Maude LTL Property Prop
i
Modeling the Dynamic Reconfiguration in Smart Crisis Response Systems
169

• Σ
ArchSoS
and (E ∪ A)
ArchSoS
represent the ArchSoS
syntax using an equational theory giving to each
ArchSoS entity (SoS, sub-systems, roles, links,
events), its rigorous semantics (meaning).
• The semantic S
ArchSoS
is defined by the tuple
(R
ArchSoS
,SM
ArchSoS
):
– R
ArchSoS
identifies a set of rewrite rules rep-
resenting actions that may affect SSoS be-
haviours, and a set of predicates that constraints
the application of these rewrite rules.
– SM
ArchSoS
is a set of strategies that may be com-
bined via operators to define ArchSoS possible
reconfigurations.
Table 3 defines the correspondence between ArchSoS
and its Maude specification. In the ArchSoS part,
we declare all sorts and operators that serve to define
ArchSoS entities. The main user-defined operator is
”opSoS”; it constructs a SoS having a clear and for-
mal syntax. The semantic part of this table (Table 3)
illustrates how we associate to each behavioural ele-
ment of ArchSoS, a rigorous semantic. For instance,
one reconfiguration is defined by a strategy S
i
, which
containts a set of rewrite rules combined via Maude
strategy language dedicated operators.
Our contribution will be more explained through
the scenarios taken from the proposed case study
(SCRSoS). In order to deal with both SCRoS mis-
sions simultaneously, our previous behavioural model
does not define this situation, the rewriting of the cor-
responding SCRSoS states must be done sequentially
and separately. In this present work, we use some
strategies definition to tackle this problem. Figure 3
illustrates the strategy module.
• FireDistinguishS strategy: Is defined to achieve
the FireDistinguish mission, it has six rewrite
rules reconfigured sequentially with the ”;” oper-
ator, stating that each rule needs to be executed
before the next one is applied.
• HurricaneEvacuationS strategy: Similarly, it is
proposed to achieve the HurricaneEvacuation
mission.
• CrisisResponseS strategy: It represents the global
reconfiguration of the SCRSoS, and it is com-
posed of the FireDistinguishS strategy, followed
by the HurricaneEvacuationS strategy using the
operator ”|”. It states that even if the FireDis-
tinguish mission is not achieved where the fire
event does not happen; theHurricaneEvacuationS
strategy still carries on and is executed (a char-
acteristic of the union operator ”|”), there is no
dependency between both strategies. Besides, if
both strategies can be executed when the SCRSoS
strategy is applied, the FireDistinguish one has
higher priority than the HurricaneEvacuationS, it
is executed before the latter.
An initial state of SCRSoS is defined in Figure 3. It
contains all the six events that may be used to describe
both SCRSoS scenarios. Both scenarios can be exe-
cuted with the command:
srew initial using CrisisResponse.
The execution results are shown in Figure 5. They
state that both the FireDistinguishS strategy and the
HurricaneEvacuationS strategy are executed simulta-
neously, and two distinct solutions are available, with
FireDistinguishS being the first solution. It is worth
to note that:
• The SCRSoS strategy execution has the ability to
deal with parallel and concurrent events. Thus, it
can respond to many crisis at the same time.
• In addition, while defining strategies in a sequen-
tial order, a priority is given to some scenarios
over others, this is interpreted as dealing with ur-
gent crisis first, before crisis that have more reac-
tion time.
6 FORMAL ANALYSIS
Formal models of SoS specified with this ArchSoS
extension have been executed and prototyped through
Maude system, in order to show how we deal with
dynamic reconfiguration of Smart SoS. In this sec-
tion, we exploit the model-checker tool of Maude to
express and analyse SoS inherent properties. We de-
velop a new Maude module called ArchSoSAnalysis
containing a set properties defined using LTL syntax
(more details can be found on [Rozier, 2011]) :
• inactivity: Checks if an SoS role is inactive, stated
by the word ’null’.
• roles-violation: Checks if a role combination has
occurred, despite having combined roles that are
not compatible.
• links-violation: Checks if two constituent systems
are linked while being incompatible on that spe-
cific link;
• vivacity: It ensures that something good will al-
ways happen. It checks that every SoS on which
the inactivity property holds, will always end up
active:
eq vivacity = [ ] <> (inactivity ⇒∼ inactivity).
ENASE 2022 - 17th International Conference on Evaluation of Novel Approaches to Software Engineering
170
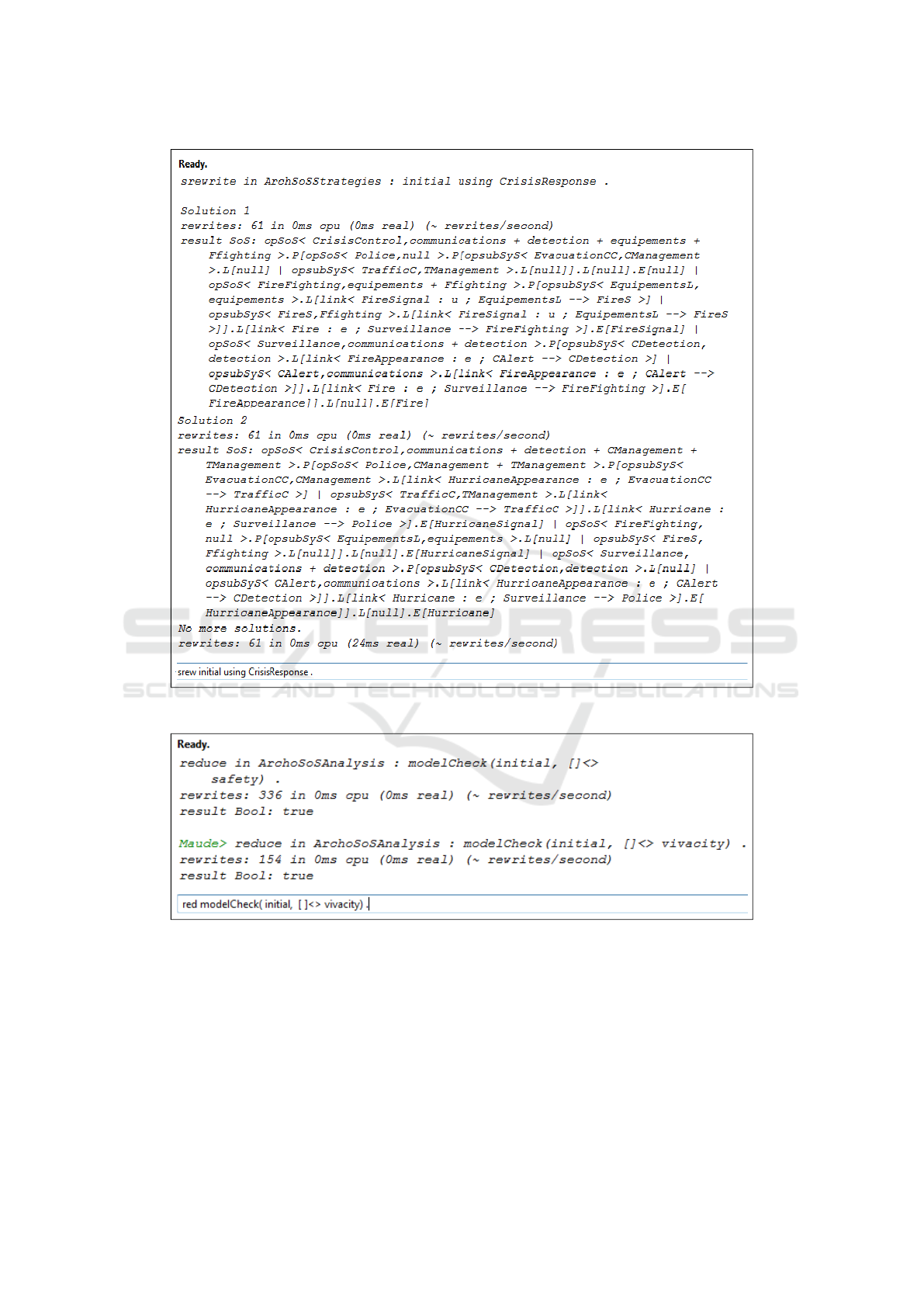
Figure 5: SCRSoS strategy execution.
Figure 6: Safety and Vivacity model-checking results.
• safety: It ensures the correct evolution of SoS be-
haviours, by respecting the defined behavioural-
constraints. It checks that both behavioural-
constraints, for links and roles, are not violated
through all SoS evolution states, it is noted as :
eq sa f ety = [ ](∼ links - violation/\
∼ roles - violation).
• FireDistinguishMission: A property that checks
if SCRSoS will have a state where the roles-
combination required to achieve the FireDistin-
guish mission holds.
• HurricaneEvacuationMission: A property that
checks the presence of the roles needed for the
HurricaneEvacuation mission on a SCRSoS evo-
lution state .
A given Property is executed using the model-checker
Modeling the Dynamic Reconfiguration in Smart Crisis Response Systems
171
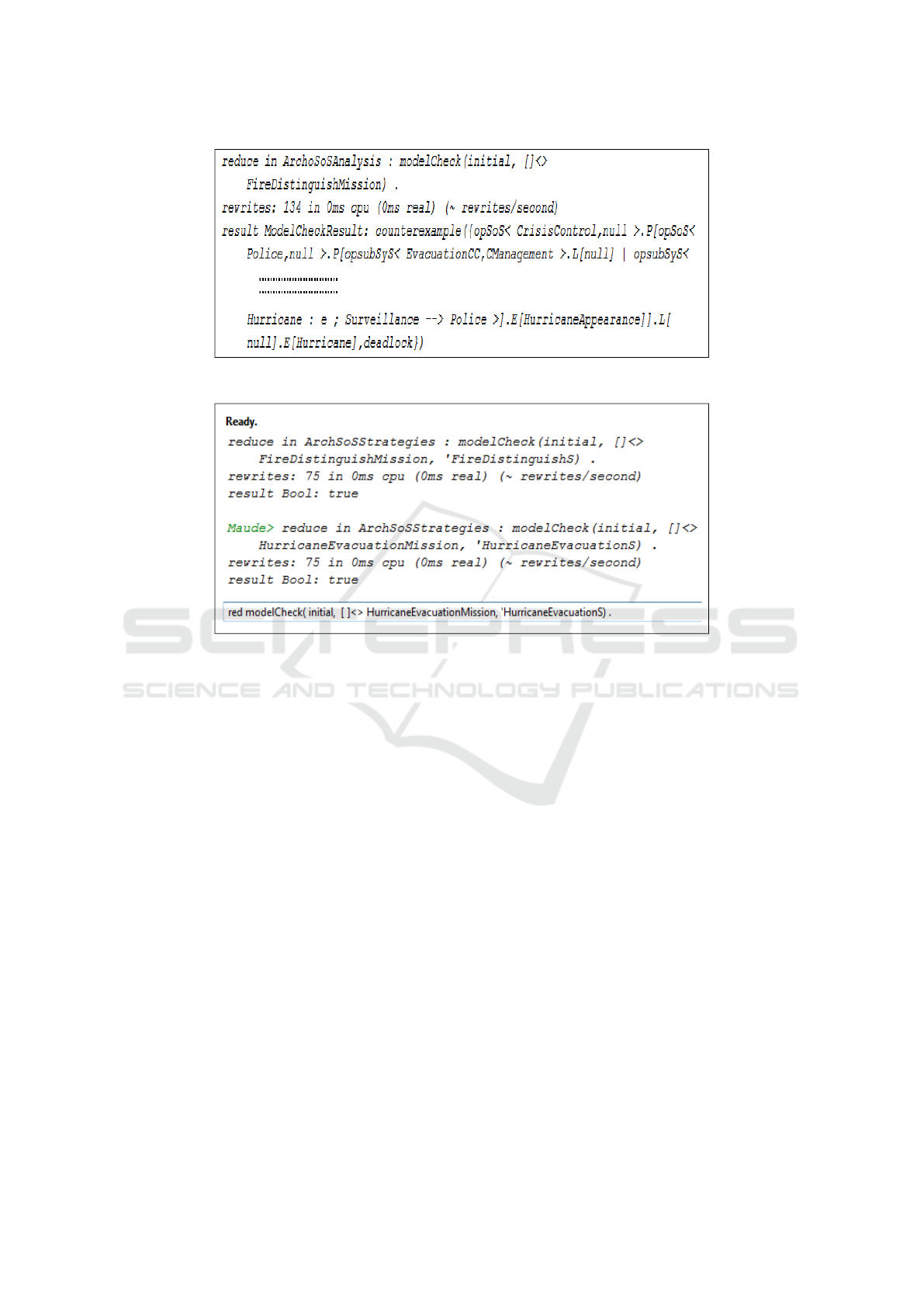
Figure 7: FireDistinguishMission property model-checking using Maude.
Figure 8: SCRSoS missions’ model-checking using Maude strategies.
tool via the command :
red modelCheck(initial, LT Loperators P)
Where P is the property to verify, preceded by a com-
bination of the LTL operators <> and [ ] to define if
the property needs to hold at least once in the evolu-
tion process, or to always hold for instance. Figure 6
shows the execution results of both the vivacity and
the safety properties. They both return true indicating
that they are valid through the execution of SCRSoS
evolution actions.
However, when executing the FireDistinguishMission
or the HurricaneEvacuationMission, both return a
counterexample stating that both properties are not
valid. This is explained by the fact of having two
disctinct scenarios. Maude can only execute one sce-
nario at once, and since both scenarios have the same
initial state, thus affecting each other when executed.
For instance, Figure 7 shows the counter-example
from the analysis of the FireDistinguishMission prop-
erty, it represents the execution of theHurricane sce-
nario as a situation where the property FireDistin-
guishMission never holds.
In order to deal with this problem and to vali-
date the properties concerning SCRSoS missions, we
need to verify each property by applying the strategy
defined for specific missions in the model-Checking
process. It will have the following syntax (Rubio
et al., 2022):
red modelCheck(initial,[] <> MissionP,
0
MissionS)
where MissionP is the property that verifies the mis-
sion validation, and MissionS is the strategy to apply
on the model-checking process, preceded by the sym-
bol ’
0
’. Figure 8 shows the new execution results for
both properties FireDistinguishMission and Hurrica-
neEvacuationMission. Now, they return true, indi-
cating that they are valid.
We notice that the SCRSoS missions’ proper-
ties that couldn’t be validated using standard Maude
model-checking, are validated when reconfiguring the
SCRSoS through specific strategies for each mission.
7 CONCLUSIONS
In this paper, we have extended ArchSoS, an ADL
dedicated to describing SoS architectures in order to
deal with Smart SoS. First, we have defined a concep-
tual model for SoS by adapting ArchSoS concepts to
ENASE 2022 - 17th International Conference on Evaluation of Novel Approaches to Software Engineering
172

the ISO/IEC/IEEE 42010 standard. Then, we have
formalized the extended version of ArchSoS using
rewriting logic. Smart SoS architectures and their
behaviors have been defined through a set of Maude
modules allowing the formal execution and analysis
of these models. Rewriting rules and predicates have
been proposed to give a natural semantics to SoS be-
havior evolution. Dynamic reconfiguration of Smart
SoS due to many possible external events was well
specified using the concept of strategy provided by the
Maude Strategy language. Three strategies have been
defined for the considered case study SCRSoS, their
execution has shown that two crisis scenarios may be
applied simultaneously to achieve two SoS missions
at the same time.
In addition, we have proposed a set of proper-
ties that we have checked positively using the model-
checker LTL of Maude. Thus, we have shown the
relevance of Maude strategies while validating some
properties that remain not valid with the previous
model of ArchSoS. In future, we plan to equip Arch-
SoS with temporal constraints in order to check non-
functional properties. Other case studies are also pos-
sible to better illustrate the contributions of this lan-
guage.
REFERENCES
Chaabane, M., Rodriguez, I. B., Colomo-Palacios, R.,
Gaaloul, W., and Jmaiel, M. (2019). A mod-
eling approach for systems-of-systems by adapt-
ing iso/iec/ieee 42010 standard evaluated by goal-
question-metric. Science of Computer Programming,
184:102305.
Clave, M., Dur
´
an, F., Eker, S., Lincoln, P., Marti-Oliet,
N., Meseguer, J., and Quesada, J. F. (2000). Towards
maude 2.0. Electronic Notes in Theoretical Computer
Science, 36:294–315.
Clavel, M., Dur
´
an, F., Eker, S., Lincoln, P., Mart
´
ı-Oliet,
N., Meseguer, J., and Talcot, C. All About Maude
- A High-Performance Logical Framework : How
to Specify, Program, and Verify Systems in Rewrit-
ing Logic. Programming and Software Engineering
, 4350. Springer-Verlag Berlin Heidelberg.
ISO/IEC/IEEE (2011). Systems and software engineering –
architecture description. ISO/IEC/IEEE 42010: 2011
(E)(Revision of ISO/IEC 42010: 2007 and IEEE Std
1471-2000), pages 1—-46.
Mart
´
ı-Oliet, N., Meseguer, J., and Verdejo, A. (2009). A
rewriting semantics for maude strategies. Electronic
Notes in Theoretical Computer Science, 238(3):227–
247.
McCombs, T. (2003). Maude 2.0 primer. Department of
Computer Science, University of Illinois and Urbana-
Champaign, Urbana-Champaign, Ill., USA.
Meseguer, J. (1996). Rewriting logic as a semantic frame-
work for concurrency: a progress report. In Inter-
national Conference on Concurrency Theory, pages
331–372. Springer.
Milner, R. (2009). The space and motion of communicating
agents. Cambridge University Press.
Nielsen, C. B. and Larsen, P. G. (2012). Extending vdm-rt to
enable the formal modelling of system of systems. In
2012 7th International Conference on System of Sys-
tems Engineering (SoSE), pages 457–462. IEEE.
Nielsen, C. B., Larsen, P. G., Fitzgerald, J., Woodcock, J.,
and Peleska, J. (2015). Systems of systems engineer-
ing: basic concepts, model-based techniques, and re-
search directions. ACM Computing Surveys (CSUR),
48(2):1–41.
¨
Olveczky, P. C. and Meseguer, J. (2007). Semantics and
pragmatics of real-time maude. Higher-order and
symbolic computation, 20(1-2):161–196.
Oquendo, F. (2016). π-calculus for sos: A foundation
for formally describing software-intensive systems-
of-systems. In 2016 11th System of Systems Engineer-
ing Conference (SoSE), pages 1–6. IEEE.
Oquendo, F. (2019). Architecting exogenous software-
intensive systems-of-systems on the internet-
of-vehicles with sosadl. Systems Engineering,
22(6):502–518.
Oquendo, F. and Legay, A. (2015). Formal architecture
description of trustworthy systems-of-systems with
sosadl. ERCIM News, (102).
Rubio, R., Mart
´
ı-Oliet, N., Pita, I., and Verdejo, A. (2022).
Model checking strategy-controlled systems in rewrit-
ing logic. Automated Software Engineering, 29(1):1–
62.
Van Veelen, J., Van Splunter, S., Wijngaards, N., and Bra-
zier, F. (2008). Reconfiguration management of cri-
sis management services. In The 15th conference
of the International Emergency Management Society
(TIEMS 2008).
Modeling the Dynamic Reconfiguration in Smart Crisis Response Systems
173
