
Energy Consumption of a Hexspider Robot-o as Function of Footwear
and Underground: Experimental Investigations
Bernhard Heiden
1,3 a
, Christian A. Koren
1 b
, Volodymyr Alieksieiev
2 c
and Bianca Tonino-Heiden
3 d
1
Industrial Engineering and Management Studiengang, University of Applied Sciences, Europastrasse 4, Villach, Austria
2
Faculty of Mechanical Engineering, Leibniz University Hannover, An der Universit
¨
at 1, Garbsen, Germany
3
Philosophy Institute, University of Graz, Heinrichstraße 26/V, Graz, Austria
Keywords:
Logistics, Multirobots, Selforganisation, Educational Tool, IoT Application, Robot-o, Spiderino.
Abstract:
In this paper, the previously designed and implemented spiderino robot-o, or a robot used to act in a swarm
for educational purposes, is investigated regarding his energy-consuming properties. An experimental setup
consists of a platform inside which the spiderino robot-o can freely move with a fixed random movement
program. Furthermore, the robot-o feet were equipped with footwear made of materials with different friction
coefficients, non-equipped or plastics, equipped with cork, equipped with rubber, and the underground was
chosen to be stone, wood, plastics, and with regard to floor inclination for all variants flat and for the stone
variant also inclined by 10%. The results show a characteristic curve in energy consumption according to a
slightly different behaviour concerning the material combinations of footwear and floor, which adapts energy
consumption physically due to the specific footwear-underground combination.
1 INTRODUCTION
Cyber-Physical-Systems (CPS) or devices are usually
controlled by microcontrollers, as the widely used Ar-
duino platform, which is comprehensively described
in (Borchers, 2013).
In Internet of Things (IoT) systems on the other
hand, or systems that are widely connected, and that
are usually a CPS, the energy consumption is of great
importance, because of battery need, long term unas-
sisted usage and independent operation. A theoretical
approach how to reduce energy efforts in IoT systems
is done in (Demigha and Khalfi, 2019) by means of
a linear temporal logic approach, which allows for
exhaustive investigation of possibilities by creating
Kripke automata, Petri nets, finite state automata etc.
In this paper, however, we investigate a specific ap-
plied and related to mechanical experimentations ap-
proach of the question of how to reduce the amount of
used energy as a function of material surface contact
pairing parameters.
a
https://orcid.org/0000-0001-8324-6505
b
https://orcid.org/0000-0002-3036-4046
c
https://orcid.org/0000-0003-0792-3740
d
https://orcid.org/0000-0001-7648-2833
In education the approach of using low cost swarm
robots (Elmenreich et al., 2015; M. Jdeed, 2017) is
used, which we call here spiderino robot-o, directing
to an orgiton of i-th order, which is a cybernetic unit of
a robot, that acts in a swarm as a ‘hyper-organism’ (cf.
also (Heiden and Tonino-Heiden, 2022a; Heiden and
Tonino-Heiden, 2022b)). A theoretical and numer-
ical study has been done on the ‘spiderin-o’ to invest-
igate a minimal communication experimental setup
with sensors and actuators consisting of emitted and
observed LEDs (Heiden et al., 2021a).
The spiderino robot-o is as well an educational
tool as a prototype for industrial production. Once es-
tablished, a lot of applications are available. Classes
from all ages can be taught and further on an im-
plementation in the school and university system in
assisting with easy to medium tasks developed. Ba-
sics kits of spiderin-os or spiderino robot-os should
be given for the teaching system.
Content. In this paper we give in Section 1 the goal
of the paper. In Section 2 we explain the position of
this paper. In Section 3 we describe the spiderino
robot-o that we investigate. In Section 4 we look
at the experimental setup, first in Section 4.1 giving
Heiden, B., Koren, C., Alieksieiev, V. and Tonino-Heiden, B.
Energy Consumption of a Hexspider Robot-o as Function of Footwear and Underground: Experimental Investigations.
DOI: 10.5220/0011090400003194
In Proceedings of the 7th International Conference on Internet of Things, Big Data and Security (IoTBDS 2022), pages 267-273
ISBN: 978-989-758-564-7; ISSN: 2184-4976
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
267

general considerations, then in Section 4.2 the exper-
imental results of energy consumption by comparison
of different footwear. In Section 4.3 we are looking
at the energy consumption measured by comparison
of different floors, and in 4.4 at possible logistics ap-
plications to this now educational approach, in future
also applying to industrial and societal technological
applications. In Section 5 we draw conclusions, and
in Section 6 we give a summary and an outlook to
the energy consumption of the spiderino robot-o and
related research and application approaches.
Goal. The goal of this paper is to investigate the en-
ergy consumption of a spiderino educational robot,
here referred to as spiderino robot-o, as a function
of different varying environmental conditions with re-
gard to friction, and plane inclination.
2 POSITION
The position of this paper is that we can influence
the energy consumption of a spiderino robot-o to re-
duce energy usage in general by means of mechan-
ical friction surface pairs. We further assume that the
hypothesis is true, that we can discriminate by suit-
able measurement the effects that have significant im-
pact on energy consumption and that we can optimise
the energy consumption of the spiderino robot-o with
regard to the surface conditions by a suitable equip-
ment, which is in our case footwear, by this influ-
encing a pairing of two contacting surface materials
in the spiderino robot-o environment relative motion
problem.
3 BACKGROUND: ROBOT-O
When we regard a robot-o we regard different levels
of organisation. This can be seen, as different
identical spiderin-os which then lead to a group of
interacting systems which would be the first consid-
eration of a spiderino robot-o
i
i=0 relating to a single
and i=1 to, e.g. a group. In our investigation we re-
gard another differentiation, of a robot-o, and this is
one spiderino, with regard to different alternating con-
ditions, of his footwear, or exchangeable outfit, and a
fixed nearby environment, the different floors. The
other one is the far distant environment or the outside
of the experimental situation window. This ‘window’
can be regarded as the cage in which the spiderin-o,
is allowed to move (see Figure 2), which is then the
observed room, or the system-border, in this case of
the experimental setup. So what we get is an orgiton
of a combinatorial setting of near and distant envir-
onment, which could be indicated by two indices in
our investigation. The spiderin-o
a
b
relates then to a
as the type of footwear, and b to the type of ground.
In fact the intermission of a ‘wear’, changes the rela-
tion of a system to its environment. On the one side
it is a shield, increasing some kind of ‘distance’, as
well as physical conditions, like the weight increase.
So this interaction relationship changes, with regard
to friction, as we had intended to investigate in the
experimental setup. The friction µ
a,b
, is the physical
bidirectional interaction variable. Here we investig-
ate this relation to the total Energy consumption E for
movement for the spiderino, which hence can also be
regarded as an optimisation problem of movement of
a body, a robot-o as a function of µ
a,b
. The problem
formulation is hence according to equation (1),
E(µ
a,b
)
!
= opt (1)
where the sign ‘!’ translates for ‘it should be’ and
the phrase ‘opt’ for ‘optimum value’, which is a min-
imum in this case, as the minimum conditions for en-
ergy consumption of the robot-o shall be met, or max-
imum with regard to time, or distance covered.
4 EXPERIMENTAL SETUP
In this Section we give first some considerations, then
the results with regard to energy consumption of the
measurements and later on how the spiderino can be
related to industrial applications.
4.1 General Considerations
Concerning the experimental setup as indicated
earlier, different combinations of material of the foot-
wear a and the grounding b were done. The footwear
was a=standard plastic, cork, rubber. The ground was
b=wood, stone, carpet, and with regard to inclination
10%. The inclination was tried to be steeper but it
turned out that a steeper gradient had led to instable
movement of the robot-o so that it turned over in that
case. So we restricted the experimental setup to an in-
clination that was save enough for constant safe con-
tinuous movement in all directions. In any case the
movement of the spiderino can be regarded randomly,
due to the experimental setup.
IoTBDS 2022 - 7th International Conference on Internet of Things, Big Data and Security
268

Figure 1: Robot-o with standard, cork, and rubber footwear
from left to right according to (Koren, 2021) .
Figure 2: Robot-o platform and measurement according to
(Koren, 2021) .
4.2 Comparison of Different Footwear
and Floors
In Figures 3-9 the different footwear of the robot-o
is shown for all the different floors, as well as the
consideration of 10% inclination for stone floor. As
a result we can see a wide spread in results for the
standard footwear and a low for rubber on different
grounds. Rubber seems to be equilibrating the results
as was the case with the effect of inclination and the
domination of gravitation over other effects. Hence it
seems that in the specific material pair combinations
rubber has a dominating effect as material. In general
the wooden floor is best, except with rubber footwear,
here there has occurred an inversion, the stone floor is
relatively best according to Figure 9.
4.3 Energy Consumption
When we look at the energy consumption of the
robot-o we would have to know the velocity of move-
ment, and when we assume it as constant, then we
have a mean constant increase in height and the height
would be like in equation (2) proportional to t.
h ∼ t → E ∼ t (2)
Now when we assume E to be the potential energy
E = E
pot
+ E
x
= m · g · (h + x) (3)
then it follows
E
m · g
∼ t ∼ (h + x) (4)
Now having two robot-os with different mass m
1
,
m
2
, due to their footwear as in the experiments, and
also different Energies E
1
, E
2
, we get the relation at
the same time:
E
1
E
2
∼
m
1
m
2
(5)
When we take 1 for standard and 2 for rubber or
cork: m
1
=119 g and m
2
= 120 g then
E
2
∼
m
2
m
1
· E
1
(6)
E
2
= γ ·
m
2
m
1
· E
1
= γ
∗
· E
1
(7)
From the experiments we get γ
∗
=1.0005 in Figure
6. The measurements of the masses are at least in the
same measurement range of the measurement instru-
ment (+-1g), that there would be necessary a more
accurate measurement, and hence the factor m
2
/m
1
can not be determined from the data correctly oth-
erwise. The measured data indicate that there is a
homogenisation of the inclination, which means that
the effect of the used materials is smaller compared
to energy consumption. Anyhow, it seems to get im-
proved by means of elastic feet, relatively. The homo-
genisation, might also have occurred due to the slight
mass increase of the rubber and cork footwear variant
compared to the no-extra footwear variant, but this
should be re-evaluated after having done more accur-
ate measurements, due to the above given argumenta-
tion.
4.4 Logistics Applications
A model of the spiderino robot-o, presented in this
paper, can be seen as a basic scalable system for a
wide variety of applications (cf. also (Heiden et al.,
2020)). One of the most important application fields
of such a robot-o is, e.g. logistics. In view of ac-
tual trends towards autonomous vehicle systems, the
upscaled spiderino robot-o can take over transport as-
sistant tasks for industrial and private purposes. Tak-
ing into account its advantages while driving on dif-
ference surfaces and with different types of footwear
as well as its spider-like construction, it can poten-
tially be used, e.g. for private mobility assistance.
In (B
¨
osch et al., 2018) a cost-performance analysis
Energy Consumption of a Hexspider Robot-o as Function of Footwear and Underground: Experimental Investigations
269
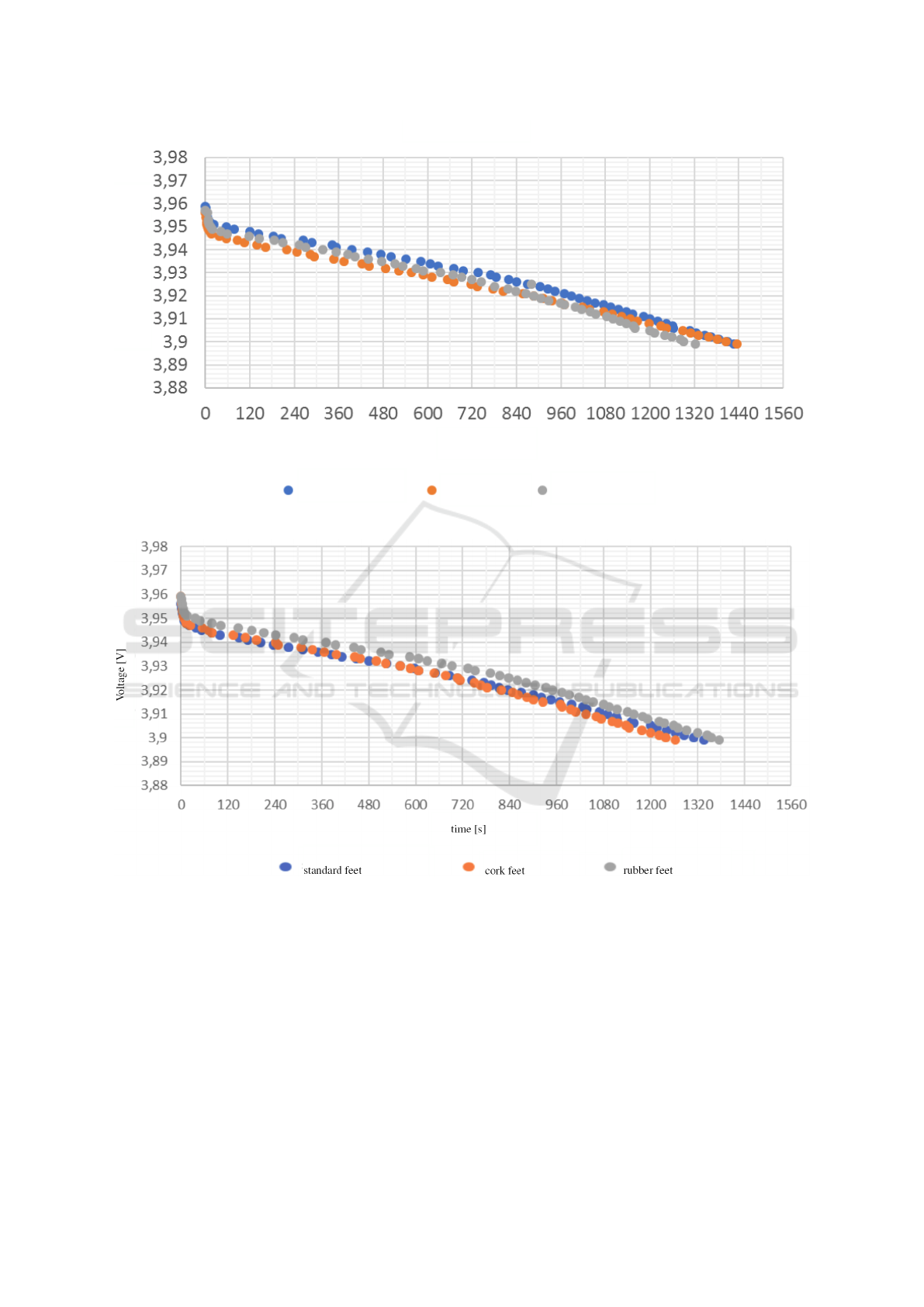
Voltage [V]
standard feet
cork feet
rubber feet
time [s]
Figure 3: Robot-o on wooden floor with different footwear according to (Koren, 2021).
Figure 4: Robot-o on carpet floor with different footwear according to (Koren, 2021).
of different autonomous mobility services was carried
out, which emphasises beneficial usage of private mo-
bility robots in the future. In addition to this, good en-
ergy performance of the described robot, while mov-
ing on the stone surfaces, allows to suggest, that it can
also be used in the industrial context, e.g. for transport
operations in mining industry (Corke et al., 1998) for
discussion of robotics application in mining industry).
Overcoming of slopes can also be a topic of interest
for future research. In case of a possible decrease of
energy consumption, while overcoming different in-
clinations, the construction of a scaled robot-o, espe-
cially with spider-like feet, can be an advantage, e.g.
for stair climbing solutions (cf. also (Heiden et al.,
2021b)).
IoTBDS 2022 - 7th International Conference on Internet of Things, Big Data and Security
270
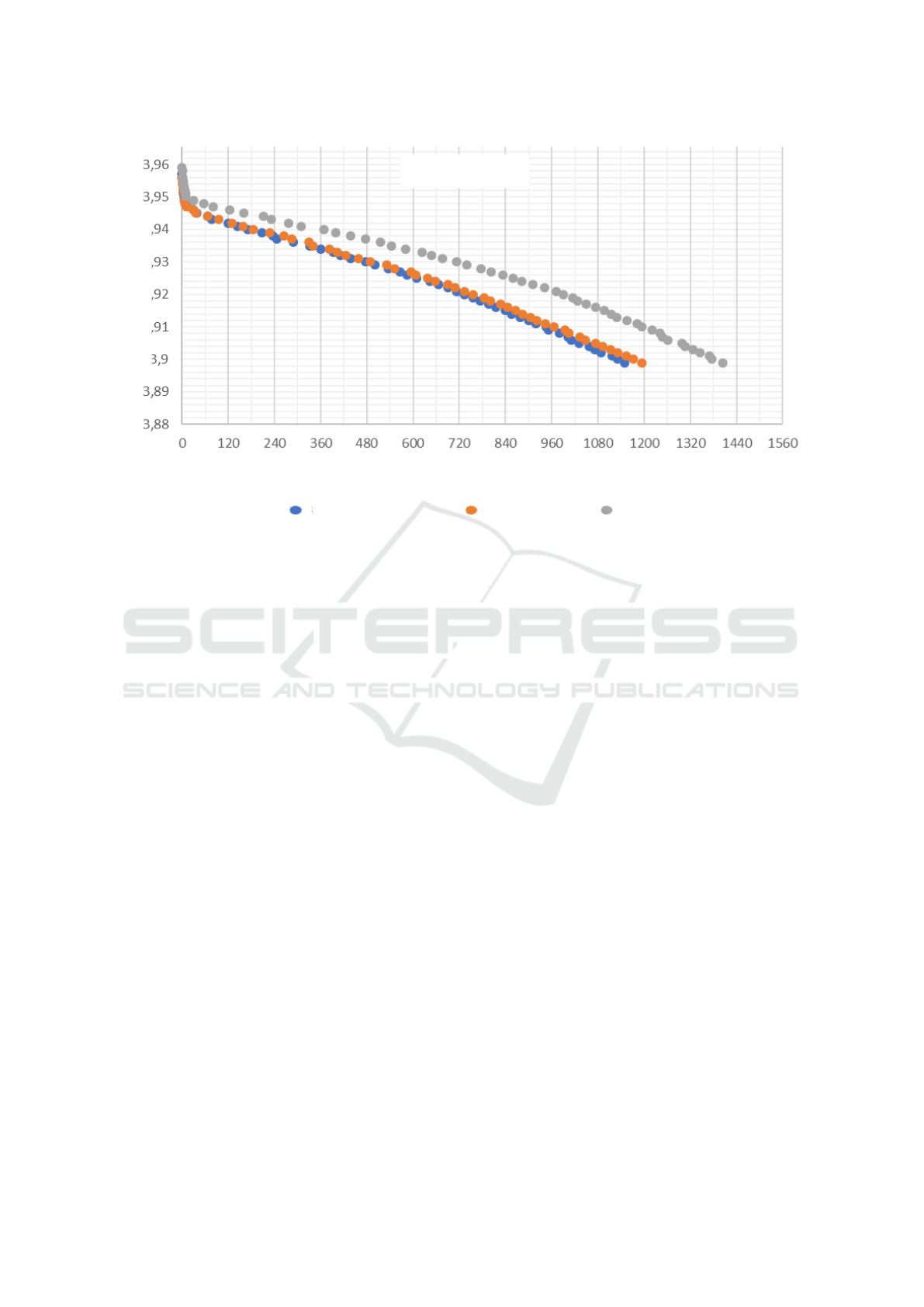
Voltage [V]
standard feet
cork feet
rubber feet
time [s]
standard feet
cork feet
rubber feet
Figure 5: Robot-o on stone floor with different footwear according to (Koren, 2021).
5 CONCLUSIONS AND
DISCUSSION
In this paper the energy consumption of a spiderino
robot-o was investigated in dependence of different
footwear materials and different floor types. For this
purpose, the discharge rate of the 3.7-volt Li-Po bat-
tery, which is the energy source of the spiderino robot-
o, was analysed and the voltage values depending on
time have been measured (V(t)). It has to be men-
tioned that rubber feet showed slightly outperforming
results on the carpet floor and significantly outgoes
other feet materials on the stone floor. In addition
to this, it has been shown, that the spiderino robot-
o masters the 10% inclination in a relatively similar
fashion with different footwear.
Due to the manual evaluation of experimental res-
ults, the differentiation between many value curves
is not explicitly noticeable. For a future better dif-
ferentiated measurement, devices with higher preci-
sion should be used, which can be also followed
from the achieved measurement accuracy according
to measurement equipment specifications (see Figure
10). Furthermore, the spiderino robot-o can poten-
tially be scaled up for the purpose of industrial or
private logistics applications as described in Section
4.4.
As from the reviewers was asked what the explan-
ation is for the time period of two hours the answer is
due to at least two reasons. First, this time is related to
the battery time that is possible for one experimental
run with this battery type. Second the measurements
were made, although originally planned with another
measurement device, with a manually to be operated
device, and synchronised with a handy video observa-
tion time measurement, which was transcribed manu-
ally. The work was done 2021 in the course of the
summer semester.
6 SUMMARY, AND OUTLOOK
In this Section we first give a summary and then an
outlook.
Spiderino – Summary. The spiderino robot-o is an
improved and modified toy robot, which has been
equipped with an Arduino board to fulfil special mis-
sions. It has been tested on different ground levels
and how it ‘reacts’ to an ascent. In the undertaken ex-
periments the shoes have been alternated or changed
as well as the different grounds. The measurements
with an upgraded 3.7-volt Li-Po battery have been re-
corded and evaluated concerning its battery discharge.
After the approximately two hours of measurements,
the battery status has been nearly the same level of
discharge at all ground levels, which is explainable
Energy Consumption of a Hexspider Robot-o as Function of Footwear and Underground: Experimental Investigations
271
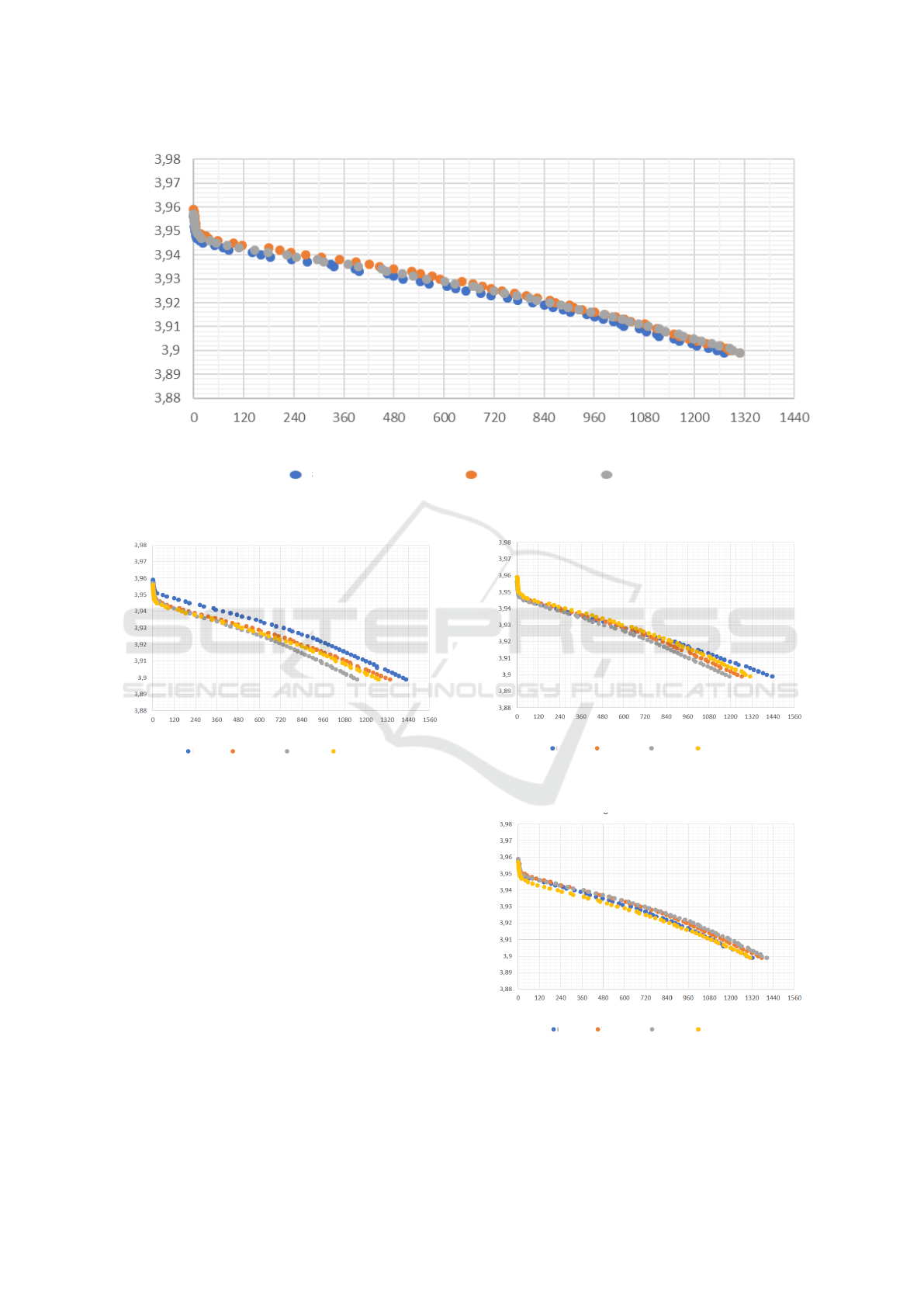
Voltage [V]
standard feet
cork feet
rubber feet
time [s]
standard feet
cork feet
rubber feet
Figure 6: Robot-o on stone floor with 10% inclination with different footwear according to (Koren, 2021).
time [s]
wooden
floor
stone
floor
carpet
floor
10% inclination
stone floor
Voltage [V]
Figure 7: Robot-o on different floors with standard footwear
according to (Koren, 2021).
by a discharging curve leading to the horizontal axis.
Outlook. More measurements and experience data
should be collected and displayed, especially about
the direct influence of friction on the discharge
amount and how the various friction pair correspond
to each other. Further the comparison between the
friction pairs should be investigated, and whether they
make a difference, as well as the correlation from the
friction coefficient and the specific ground level and
how the discharging level coheres with friction.
Research question of interests would also be how
the movement pattern for different inclinations looks
like in comparison to the planar levels, especially with
new leg and body constructions.
As we have looked in our investigation at indoor
materials, also outdoor materials should be addressed
time [s]
wooden
floor
stone
floor
carpet
floor
10% inclination
stone floor
Voltage [V]
Figure 8: Robot-o on different floors with cork footwear
according to (Koren, 2021).
Voltage [V]
time [s]
wooden
floor
stone
floor
carpet
floor
10% inclination
stone floor
Figure 9: Robot-o on different floors with rubber footwear
according to (Koren, 2021).
in future research. According to the geometry of the
IoTBDS 2022 - 7th International Conference on Internet of Things, Big Data and Security
272

Voltage [V]
time [s]
wooden floor - standard feet
Figure 10: Robot-o on wooden floor with standard feet ac-
cording to (Koren, 2021) and expected measurement accur-
acy.
spiderino robot-o, here the specific difficulty of dif-
ferently inclined movement could also be investigated
and how this could be overcome and or compensated
for successful movement, with possibly then very dif-
ferent types of spiderino robot-os or environmentally
suitably adapted robot-os in general.
REFERENCES
Borchers, J. (2013). Arduino in a Nutshell. http://hci.rwth-
aachen.de/arduino (accessed 01/27/2022).
B
¨
osch, P. M., Becker, F., Becker, H., and Axhausen, K. W.
(2018). Cost-based analysis of autonomous mobility
services. Transport Policy, 64:76–91.
Corke, P. I., Roberts, J. M., and Winstanley, G. J. (1998).
Robotics for the mining industry. In Autonomous Ro-
botic Systems, pages 163–181. Springer London.
Demigha, O. and Khalfi, C. (2019). Formal analysis of
energy consumption in IoT systems. In Proceed-
ings of the 4th International Conference on Internet
of Things, Big Data and Security. SCITEPRESS - Sci-
ence and Technology Publications.
Elmenreich, W., Heiden, B., Reiner, G., and Zhevzhyk, S.
(2015). A low-cost robot for multi-robot experiments.
In 12th International Workshop on Intelligent Solu-
tions in Embedded Systems (WISES) 2015, pages 127–
132. IEEE.
Heiden, B., Alieksieiev, V., and Tonino-Heiden, B. (2020).
Scalable logistic cell RFID witness model. In Pro-
ceedings of the 5th International Conference on In-
ternet of Things, Big Data and Security - Volume 1:
IoTBDS, pages 420–427. SCITEPRESS - Science and
Technology Publications.
Heiden, B., Alieksieiev, V., and Tonino-Heiden, B. (2021a).
Selforganisational high efficient stable chaos patterns.
In Proceedings of the 6th International Conference on
Internet of Things, Big Data and Security - Volume 1:
IoTBDS,, pages 245–252. INSTICC, SciTePress.
Heiden, B., Kattnig, D., Pechmann, J., Alieksieiev, V.,
and Tonino-Heiden, B. (2021b). Wheelchair climb-
ing construction for industrial logistical applications.
IOP Conference Series: Materials Science and Engin-
eering, 1190(1):012020.
Heiden, B. and Tonino-Heiden, B. (2022a). Diamonds of
the orgiton theory. In 2022 11th International Con-
ference on Industrial Technology and Management
(ICITM). Oxford, Great Britain.
Heiden, B. and Tonino-Heiden, B. (2022b). Philosophical
Studies - Special Orgiton Theory / Philosophische Un-
tersuchungen - Spezielle Orgitontheorie (English and
German Edition) (unpublished).
Koren, C. A. (2021). Forschungsprojekt ’Spiderino’. Bach-
elorthesis. Carinthia University of Applied Sciences,
Villach, Austria.
M. Jdeed, S. Z. (2017). Spiderino - a low-cost robot for
swarm research and educational purposes.
Energy Consumption of a Hexspider Robot-o as Function of Footwear and Underground: Experimental Investigations
273
