
Performance Analysis of an Embedded System for Target Detection
in Smart Crosswalks using Machine Learning
J. M. Lozano Domínguez
1a
, J. M. Corralejo Mora
1
, I. J. Fernández de Viana González
2b
,
T. J. Mateo Sanguino
1c
and M. J. Redondo González
1d
1
Department of Electronic Engineering, Computer Systems and Automatics, University of Huelva,
Av. de las Artes s/n, 21007 Huelva, Spain
2
Department of Information Technologies, University of Huelva, Av. de las Artes s/n, 21007 Huelva, Spain
Keywords: Embedded System, Machine Learning, Performance Analysis, Road Signalling, Target Detection.
Abstract: Embedded systems with low computing resources for artificial intelligence are being a key piece for the
deployment of the Internet of Things in different areas as energy efficiency, agriculture or water monitoring,
amid others. This paper carries out a study of the computational performance of a smart road detection and
signalling system. To this end, the implementation methodology from Matlab
®
to C++ of a one-class SVM
classifier with two pattern analysis strategies based on RADAR signals and RAW data is described. As a
result, we found a balance between AUC, RAM consumption, processing time and power consumption for a
Teensy 4.1 microcontroller with STFT and the fitcsvm2 algorithm versus other hardware options such as an
I7-3770K processor, Raspberry Pi Zero and Teensy 3.6.
1 INTRODUCTION
In recent years, there has been a boom of the Internet
of Things (IoT) devices, which are embedded systems
that incorporate specific software to work in different
fields of application (Zanella, 2014). These areas
include energy efficiency (Alowaidi, 2022),
agriculture (Rahman, 2022) or water treatment
monitoring (Sugamar, 2021) among others.
The increasing improvement of IoT devices has
made it possible to include machine learning (ML)
algorithms in control units with scarce computational
resources, such as microcontrollers (Gopinath, 2019).
As an example, a comparison of machine learning
techniques was carried out to minimize water loss
during irrigation operations (Amassmir, 2022). In this
work, Raspberry Pi 3 is used as a control unit in which
an artificial neural network (ANN) was the technique
that offered the best performance. Another work
includes the use of support vector machines (SVM) to
detect cardiac anomalies in patients through
characteristics extracted from a fast Fourier transform
a
https://orcid.org/0000-0002-2542-0517
b
https://orcid.org/0000-0002-9689-8884
c
https://orcid.org/0000-0002-9387-3892
d
https://orcid.org/0000-0001-5550-1310
(FFT). In this case, a 32-bit microcontroller system
was used to implement the machine learning
technique, achieving an accuracy of up to 95.68%
(Raj, 2020). There are also cases in the field of road
safety where a solution for accident detection and
classification alerts emergency systems based on the
severity of the accident (Balfaqih, 2022). For this, the
techniques named Gaussian Mixture Model (GMM)
and Classification and Regression Trees (CART)
were integrated into an Arduino Mega. Other work
proposed the use of ML techniques to detect
anomalies in traffic data to dynamically regulate road
signs. This solution was implemented on Raspberry
Pi 3 (Sankaranarayanan, 2019).
This paper describes an improvement of a road
detection and signalling system aimed at
distinguishing road targets through sensory fusion
and fuzzy logic (Lozano Domínguez, 2018).
Specifically, when a pedestrian is detected on a
crosswalk, the system generates visual cues that alert
drivers to stop their vehicle safely. With this purpose,
another approach for target detection using RADAR
382
Lozano Domínguez, J., Corralejo Mora, J., Fernández de Viana González, I., Mateo Sanguino, T. and Redondo González, M.
Performance Analysis of an Embedded System for Target Detection in Smart Crosswalks using Machine Learning.
DOI: 10.5220/0011142700003266
In Proceedings of the 17th International Conference on Software Technologies (ICSOFT 2022), pages 382-389
ISBN: 978-989-758-588-3; ISSN: 2184-2833
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

sensors and signal analysis applying Short Time
Fourier Transform (STFT) on a PC was investigated
(Domínguez, 2020). Furthermore, a vehicle detection
system based on ML techniques was tested for a smart
pedestrian crosswalk (Lozano Domínguez, 2021).
The current work aims to combine the previous works
on STFT analysis and vehicle detection to apply them
to an embedded system focused on discerning
pedestrians by detecting signal patterns through ML
techniques. The goal here is to validate a generic
methodology —without a domain-specific language
as in (Gopinath, 2019)
—
to implement ML
algorithms in a constrained microcontroller while
performing more costly pre-processing tasks (i.e.,
STFT) than the classification task itself. To do this,
the paper presents the implementation of several ML
techniques in an embedded system with a greater
limitation of RAM memory, CPU speed and power
consumption than other state-of-the-art solutions
based on Raspberry Pi or FPGA.
This manuscript has been structured as follows:
Section 2 describes the hardware and software of the
embedded system implemented to classify
pedestrians. Section 3 presents the ML algorithm
used, the implementation into a microcontroller and
the experimentation carried out. Finally, Section 4
highlights the conclusions and future work.
2 SYSTEM DESCRIPTION
This section describes the main hardware
components, the AI techniques applied to detect
different targets and, finally, the methodology
followed to extract a ML model and translate it into
C++ code to be interpreted by a microcontroller unit.
2.1 Hardware Components
The road signalling system is made up of a set of
intelligent nodes ubicated in the limits of a crosswalk,
each one covering an area (Fig. 1). The nodes
integrate sensors facing the inner and outer faces of
the crosswalk to detect nearby objects. A traffic-
oriented illumination is activated when pedestrians
are detected in the zebra crossing. Then, the detector
node handles the communication with the rest of the
network to synchronize the flashing lights and thus
improve road safety.
Each node integrates a microcontroller, wireless
communication, sensors, signalling and power unit.
We selected a Teensy 4.1 device to analyse data
sensor periodically collected, identify the target type
and activate the signalling unit when necessary. The
latter is composed by four high brightness white
LEDs oriented to oncoming drivers (Lumileds L128-
5070HA) and one amber LED oriented to pedestrians
(Lumileds L128-PCA12500000). The sequence and
brightness of the LEDs is controlled with a blinking
pattern through pulse width modulation (PWM). The
communication unit is implemented with a Microchip
ATSAMR21B18 device compliant with the IEEE
802.15.4 standard in an effort to save energy. The
detection unit combines Doppler RADARs and a
magnetic sensor. To this end, we selected two
RFbeam Microwave GmbH K-LD7 devices in the
24GHz band, one oriented to detect bicycles and cars,
and the other oriented to detect pedestrians.
Moreover, a STMicroelectronics LIS3MDL magnetic
sensor is used to complementarily detect the presence
of vehicles. Finally, the power unit supplies energy to
the system through a Texas Instruments
BQ25895RTWR charger connected to a set of solar
panels and Lithium Polymer (LiPo) batteries.
Figure 1: Overall diagram of the smart crosswalk.
2.2
Software Description
To detect and distinguish between vehicles and
pedestrians on a crosswalk, the developed software
follows the data flow described in Figure 2.
Figure 2: Software system structure.
The RADARs provide an I/Q signal containing
the speed and pattern information of the targets in
relation to their Doppler frequency. The control unit
processes this signal through the STFT, which allows
performing a spectral analysis of the signal. The
Performance Analysis of an Embedded System for Target Detection in Smart Crosswalks using Machine Learning
383
signal pattern is used to feed the characteristics of the
ML algorithm and identify different targets such a
walking person or a vehicle (Domínguez, 2020). To
this end, the system merges data generated in the
different sensors in a sensory fusion process. On the
one hand, the one-class support vector machine
(SVM) has been implemented to process data from
the RADARs, separately. On the other hand, a fuzzy
logic process has been developed to analyse the
magnetic sensor data. This estimates the presence of
vehicles depending on detected perturbations and can
be auto calibrated to detect even stopped vehicles. In
this way, when the one-class SVM determines the
presence of a pedestrian on the crosswalk and the
diffuse vehicle detector does not detect the presence
of vehicles, the system takes a decision through a
hierarchical classifier based on traditional logic. In
this way, the entire system activates the signalling
units in the presence of pedestrians in the vicinity of
the crosswalk. In this section, the details related to the
AI techniques used in the system will be exposed.
2.2.1 Implementation of Fuzzy Logic to
Detect Vehicles
The block called “Fuzzy vehicle detector” is used to
determine the presence or absence of vehicles around
a crosswalk by changes in the magnetic field. These
perturbations are produced due to the presence of
ferromagnetic elements in vehicles, whose values are
measured on the X, Y, and Z axes. The vehicle
detector block is a Mamdani-type fuzzy rule-based
controller with classification norms such as “If X
1
is
A
1
and … Xn is Xn, then Y is B” (Mamdani, 1977).
Both, the predictor and output variables have been
established by an expert system. To this end, we used
trapezoidal functions to establish the membership of
a fuzzy set since the adequacy to the data model is
correct and computationally simple. In addition, the
conjunction and implication operators used the
minimum T-norm (Aliev, 2013). The defuzzification
process uses the FITA method (i.e., First Inter, Then
Aggregate) in contrast to the less consistent FATI
method (Ibrahim, 2004). The process also used the
MVP weighting method (Buckley, 1994).
The vehicle detector has three inputs (i.e., one per
axis) with three tags named Changeα, NoChangeα
and ChangeNα, where α means the corresponding
axis. NoChangeα stands for the value of the magnetic
field during the idle state of the sensor, while
Changeα and ChangeNα mean a magnetic field
variation below and above the idle state, respectively.
The output of the magnetic controller ranges between
0-1 to indicate absence or presence of vehicles close
to a crosswalk (i.e., No and Yes). The rules base and
tags of the magnetic controller were experimentally
stablished by the expert system as shown in Table 1.
Accordingly, it was established that a variation of the
idle state of the magnetic sensor in at least 2/3 of its
axes indicates the presence of vehicles circulating on
the crosswalk. In another case, this means that the
vehicles do not exist.
In addition to the fuzzy rule base, a logic that takes
the last five results of the magnetic controller is
considered. If one of these five values exceeds the
threshold of belonging to the vehicle set called “Yes”
above 0.5, the presence of a vehicle is determined.
Said logic also considers that, if after a minute in
which the values of the vehicle presence are detected
continuously, the diffuse labels of the magnetic
sensor are recalibrated because this may be caused by
a vehicle parked near the crosswalk. This approach
has been implemented directly in C++ through
classes and interfaces.
Table 1: Rule base for the magnetic fuzzy controller.
Label x-axis Label y-axis Label z-axis Vehicle
NoChangeX NoChangeY NoChangeZ No
NoChangeX NoChange ChangeNZ No
NoChangeX NoChangeY NoChangeZ No
NoChangeX ChangeNY NoChangeZ No
NoChangeX ChangeNY ChangeNZ Yes
NoChangeX ChangeNY NoChangeZ Yes
NoChangeX ChangeY NoChangeZ No
NoChangeX ChangeY ChangeNZ Yes
NoChangeX ChangeY NoChangeZ Yes
ChangeNX NoChangeY NoChangeZ No
ChangeNX NoChange ChangeNZ Yes
ChangeNX NoChangeY NoChangeZ Yes
ChangeNX ChangeNY NoChangeZ Yes
ChangeNX ChangeNY ChangeNZ Yes
ChangeNX ChangeNY NoChangeZ Yes
ChangeNX ChangeY NoChangeZ Yes
ChangeNX ChangeY ChangeNZ Yes
ChangeNX ChangeY NoChangeZ Yes
ChangeX NoChangeY NoChangeZ No
ChangeX NoChange ChangeNZ Yes
ChangeX NoChangeY NoChangeZ Yes
ChangeX ChangeNY NoChangeZ Yes
ChangeX ChangeNY ChangeNZ Yes
ChangeX ChangeNY NoChangeZ Yes
ChangeX ChangeY NoChangeZ Yes
ChangeX ChangeY ChangeNZ Yes
ChangeX ChangeY NoChangeZ Yes
ICSOFT 2022 - 17th International Conference on Software Technologies
384
2.2.2 Implementation of One-class to Detect
Pedestrians
One-class SVM is an unsupervised ML technique that
has been implemented in Matlab
®
with the “fitcsvm”
library. This technique allows detecting outliers or
anomalies in the analyzed data, as well as training
with only one target class that, in our case, it would
be pedestrians. In this way, pedestrians are the targets
of the main class while vehicles and the idle state are
considered outliers. This approach has been preferred
because the only targets that should generate a light
alert are pedestrians, whilst any target that does not
have the characteristics of a pedestrian will not cause
an activation. The main advantage of this ML
technique over others is that only the “pedestrian”
class needs to be known to be trained. Furthermore, it
offers good handling of unbalanced classes and is
very sensitive to outliers. On the contrary, it requires
a good selection of hyperparameters and kernels by
the expert system (Singla, 2020).
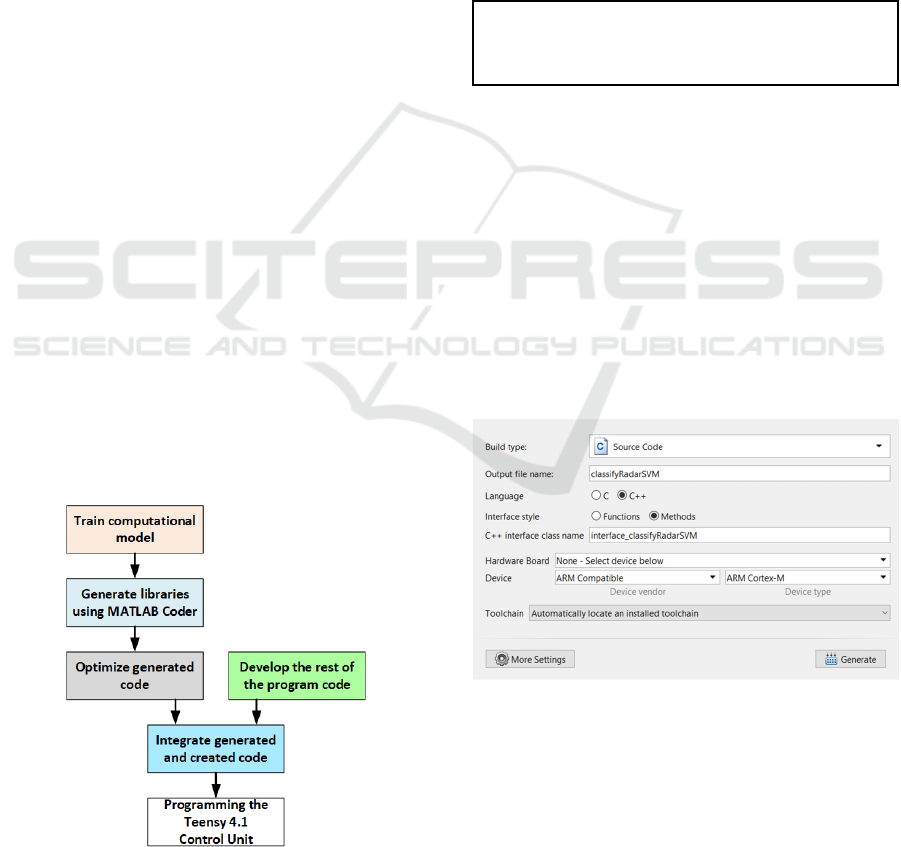
2.3
Conversion from Matlab to C++
This section describes the steps followed to export the
ML model generated after training the algorithm from
Matlab
®
to C++ code. The process is summarized in
Figure 3. The C++ language has been selected
because it is the one used in the integrated
development environment (IDE) to generate the
binary code of the control unit used (i.e., Teensy 4.1).
The procedure followed has been: i) generate a
Matlab
®
script with the necessary functions for the
execution of the program; ii) configure the Matlab
Coder tool to generate the code optimally; and iii)
perform an optimization of both the variables and the
code autogenerated by Matlab
®
.
Figure 3: Code conversion procedure.
Firstly, the script to be created in Matlab
®
must
contain the same number of inputs as those used by
the ML model, as well as specify the processing of
these inputs, if any. On the one hand, it is necessary
to specify that the model must be loaded through the
“loadLearnerForCoder” function, which allows
generating the automatic learning models in C/C++
code. On the other hand, the “predict” function must
be used to obtain the classifier’s prediction based on
the inputs (i.e., features obtained from the normalized
STFT). Finally, the output generated by the model
must also be added (i.e., pedestrian presence). The
script used can be seen in Algorithm 1.
Algorithm 1: Function to generate the ML model.
function output= classifyRadarSVM(inputs)
Mdl = loadLearnerForCoder('Model Name');
output= predict(Mdl,X);
en
d
Second, the Matlab Coder tool is required to
generate the C/C++ code from the previously
described script. This tool allows selecting whether
the source code to be generated will be C or C++,
define the name of the interfaces and select the
hardware on which the code is going to be executed
to optimize it. In the present case, none has been
selected in "Hardware Board" and then it has been
indicated that the microcontroller belongs to the
ARM Cortex-M family (Figure 4). Furthermore, it
has been indicated in the tool configuration that the
OpenMP library cannot be used, since our
microcontroller only has one processing thread.
Figure 4: Matlab Coder configuration.
Finally, an optimization of the libraries generated
by this tool was performed to adapt them to the
hardware used and reduce the space occupied in
memory. For this, the code has been analyzed in
search of possible duplications of temporary variables
in memory. Furthermore, it has been sought that those
variables initialized in their declaration remain
Performance Analysis of an Embedded System for Target Detection in Smart Crosswalks using Machine Learning
385
resident in memory to avoid copy operations during
periodic execution. The variables most frequently
accessed have been allocated in the fastest memory
areas.
The optimized code is included in the project as
part of a functional module, which is called periodically
to classify the RADAR signal.
3 EXPERIMENTATION
The K-LD7 sensor provides two types of signals. On
the one hand, PDAT provides an array of RAW data
with the speed, angle, distance and magnitude of the
targets detected. On the other hand, the RADAR
provides the I/Q signal to be later processed to obtain
identifying characteristics of the targets.
Accordingly, this section will detail the steps
followed to process the I/Q signal as the main method
to obtain additional features to those provided by the
PDAT signal.
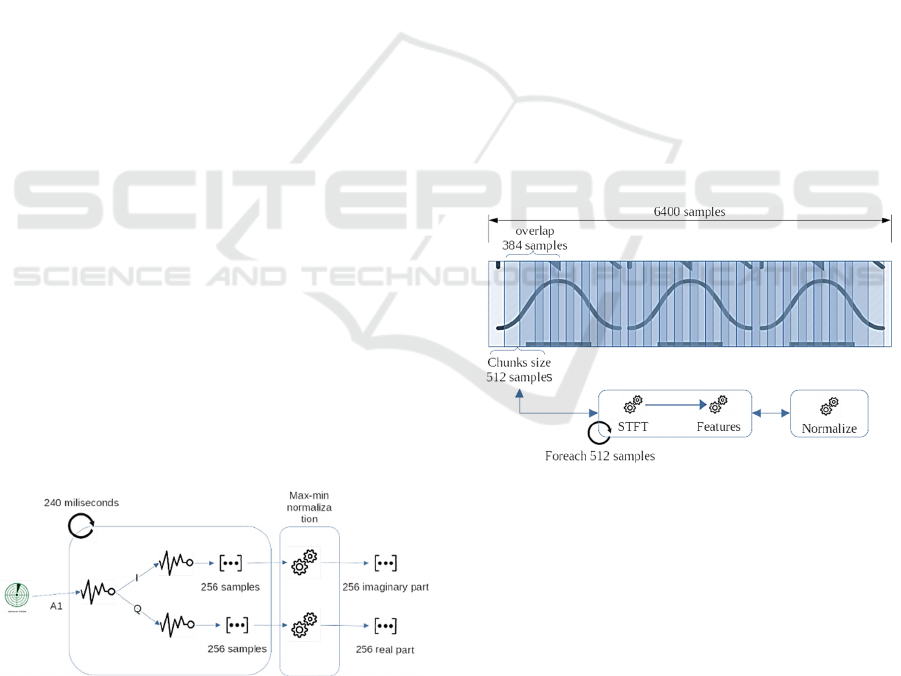
3.1 Data Pre-processing
The process begins by acquiring the A1 signal from
the K-LD7 sensor, which refers to the signal reflected
by frequency A of the RADAR received at antenna 1.
Signal A1 is a composite I/Q signal (i.e., “in phase”
and “in quadrature”), thus standing for the real and
imaginary values conforming the signal. These
signals are obtained in sets of 256 values taken with a
sampling frequency of 1100 Hz. To do this, the
RADAR query period was set to 240ms so that it was
the minimum time needed to store and communicate
a 256-value sample (see actual CPU usage in Tables
5 and 6). Once the signals are obtained, they are
normalized separately using the Min-Max method
since it is a suitable method to be the training base for
ML algorithms (Al Shalabi, 2006). This process is
depicted in Figure 5.
Figure 5: I/Q signal acquisition process.
To obtain the data to train and test the classifiers,
an outdoor setup where the RADAR captured several
scenes involving vehicles and pedestrians was
established. These included vehicles approaching,
moving away, stopping and starting, as well as
individuals, groups of people, pedestrians with pets,
cyclists and scooter users. Figure 6 details the steps
followed to process each of the scenes. Each one is
made up of 25 consecutive RADAR acquisitions,
giving us a total of 6400 samples per scene.
Subsequently, the real and imaginary parts of the
signal were processed by means of the STFT.
Specifically, we applied a sample rate of 1100 Hz, a
Kaiser-type window, an overlap length of 200 values
and an FFT size of 512 points. Then, it was divided
into chunks made up of the same number of points.
Each one of these pieces are the minimum units to be
classified. That is, the labels of the classification
process will be assigned to these pieces and not to
each one of the samples that form them.
Preliminary tests were carried out to obtain the
minimum cut-off size that optimizes the classification
results in relation to the space used to store the signal.
Amid different sizes (i.e., from 256 to 8192 values),
it was found that the best results were achieved with
512 values, whilst sizes greater than 2048 were
discarded due to hardware restrictions. In addition,
and in order not to lose the temporal evolution of the
signal, it was decided to chop the signal with an offset
of 128 values. Therefore, each of the scenes is divided
into 50 pieces.
Figure 6: Overview of a scene processing.
The next step was to characterize each of the
pieces obtained. For each one, 20 features were
obtained based on simple statistical calculations such
as the mean value, variance, difference between the
maximum and minimum value, median or the
kurtosis value. Finally, the feature values were
normalized by the Euclidean norm (i.e., 2-norm).
Table 2 shows the whole list of features.
Once the scenes were characterized, the next step
was their labelling by a group of experts. As said
before, each piece is labelled independently. The
strategy followed by the experts was to assign the
target label ‒represented by 1‒ when the crosswalk
ICSOFT 2022 - 17th International Conference on Software Technologies
386
must light up the LEDs and the outlier label ‒
represented by 0‒ in other cases. For the experiments
performed in this paper, a total of 81 scenes were
defined resulting in a total of 4050 labelled chunks.
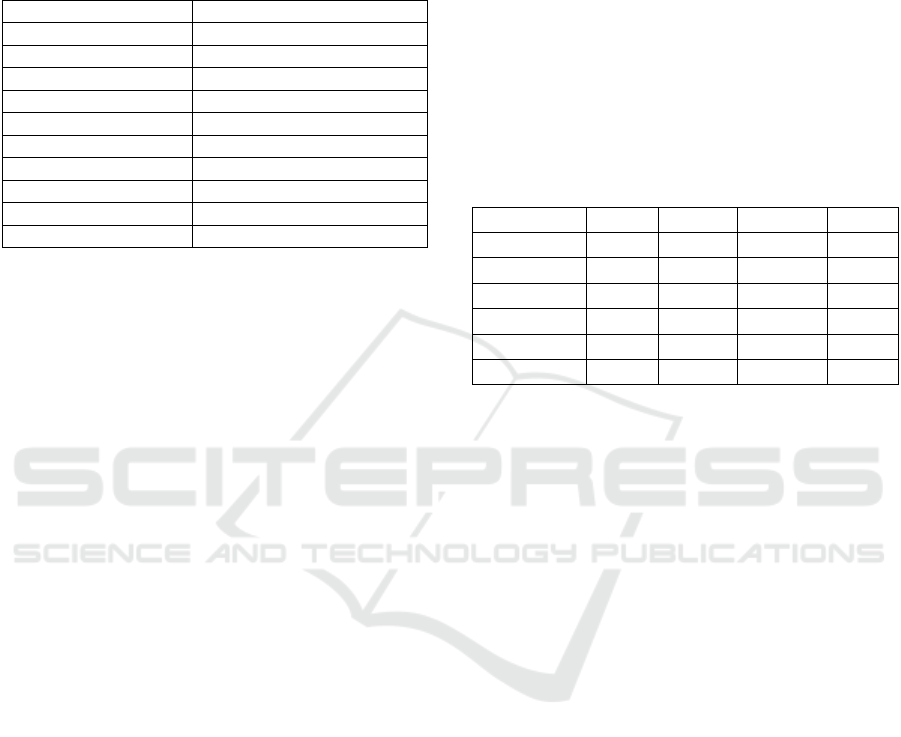
Table 2: Features applied to extract the STFT pattern.
Features #1-10 Features #11-20
mean(sliceVec); median(sliceVec)
mean(sliceVec.^2) mean(std(slice,0,1)
mean(sliceVec.^3) std(mean(slice,1))
mean(sliceVec.^4) std(std(slice))
std(sliceVec); std(std(slice,0,1))
skewness(sliceVec); mean(std(slice,0,2)
kurtosis(sliceVec); std(mean(slice,2))
quantile(sliceVec,0.25) std(std(slice))
quantile(sliceVec,0.50) std(std(slice,0,2))
quantile(sliceVec,0.75) max(sliceVec)-min(sliceVec)
3.2 Parameter Settings and Learning
Outcomes
Two different datasets were used to study the
behaviour of the one-class SVM classifier. The first
one was formed by the data obtained from the PDAT
signal and the second one by the data obtained after
processing the I/Q signals (see Section 3.1). The one-
class SVM classifier used in this paper applies the
radial basis kernel, find a scale value for the kernel
function and standardize the predictors. These values
were not tuned because, apart from being far from the
goals of this paper, very promising results were
obtained. In addition to the one-class SVM classifier,
we tested other one-class classifiers provided by the
ddtools library as well as bi-class classifiers such as
TreeBagger or Random Forest (RF). As mentioned
before, the default parameters were used in all cases.
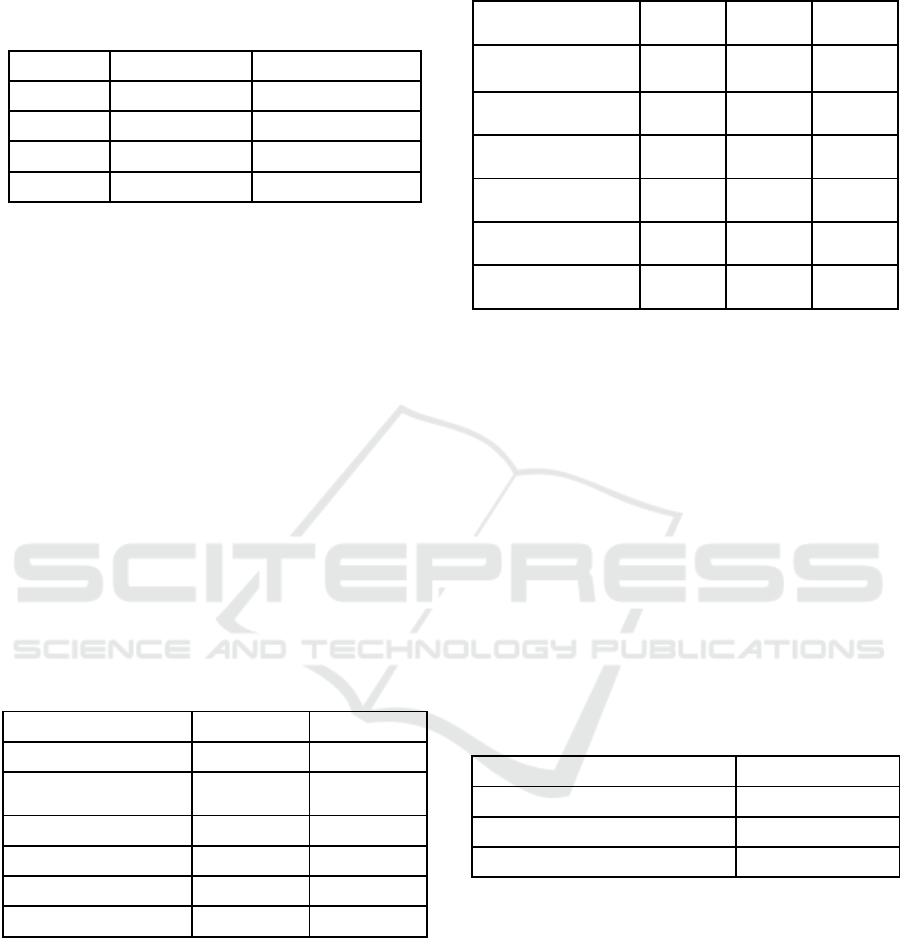
The cross-validation method was used to evaluate
the classifier process. Table 3 summarises the results
obtained with I/Q signals for which the AUC reached
quite high scores. Note that this table does not contain
the results obtained with the PDAT signal as they
were quite poor. The classifier was not able to
distinguish whether the object passing in front of the
RADAR was vehicle or pedestrian. Therefore, the
classifier suffered from over-fitting which caused
continuous false positives.
We found that the two one-class SVM versions
can achieve higher AUC than the two-class classifiers
without using outliers in the training process. The
difference between fitcsvm1 and fitcsvm2 is that the
latter assumes that 5% of the observations are
outliers. Moreover, the values they achieved are much
better than the rest of the one-class classifiers. It
should be highlighted that these results are penalised
too much as we have not considered the delays in the
prediction. That is, the experts labelled each of the
6,400 samples per scene indicating the exact moment
at which the LEDs should light up. Instead, the
classifier works on chunks of 512 samples labelled as
a whole. Besides, the criteria followed by the experts
were not the same due to human interpretation.
Therefore, the exact moment in which the LEDs had
to be turned on could be different depending on the
expert who labelled the samples. As a result, the AUC
values tend to 1 as the presence of a pedestrian
becomes more evident after successive time intervals
(i.e., 512-value samples shifted 256 values).
Table 3: One-class classifier results.
Algorithm ACC Recall Specif. AUC
fitcsvm1 0.951 0.961 0.886 0.924
fitcsvm2 0.912 0.914 0.96 0.937
kcenter 0.117 0.655 0.105 0.38
kmeans 0.117 0.656 0.105 0.38
TreeBagger 0.965 0.978 0.86 0.919
RF 0.948 0.956 0.850 0.903
3.3 Results and Discussion
Teensy 4.1 was the microcontroller selected to
comply with the system requirements (i.e., acceptable
consumption, enough memory RAM to run code and
high processing speed to provide real-time
responses). In addition to the algorithms explained,
Teensy 4.1 executes a main code to handle data
collection, wireless synchronization, and lighting
control. All modules are subject to significant time
restrictions. On the one hand, the main control code
and the Fuzzy algorithm takes +100KB of RAM. On
the other hand, the one-class SVM algorithm is the
most memory demanding with +400KB of RAM. The
whole code is allocated in the RAM1 bank, which is
accessed as tightly coupled memory for maximum
performance. The RAM2 bank ‒or PSRAM‒ could
be used to extend the main memory requirements.
Accordingly, the memory regions of Teensy 4.1 for
STFT are shown in Table 4. In contrast, the one-class
SVM classifier developed for the PDAT signal has
greater memory footprint. After a code optimization
process, the memory footprint was reduced by
40%.
Moreover, the system must respond in a short
time. Hence, the processing of incoming data from
the RADAR through STFT and the one-class SVM
classifier is crucial for the system latency. In our
solution, the choice of Teensy 4.1 has been the key to
speed up this process compared to other
microcontroller options. Table 5 shows the
Performance Analysis of an Embedded System for Target Detection in Smart Crosswalks using Machine Learning
387
processing time for the RADAR I/Q signals with
different hardware approaches.
Table 4: Usage of memory regions in Teensy 4.1.
Memory Usage for STFT Usage for PDAT
RAM1 500/512 KB 504/512 KB
RAM2 Free/512 KB 185/512 KB
Flash 263/8192 KB 561/8192 KB
PSRAM Free/16384 KB Free/16384 KB
Both the STFT and the one-class SVM classifier
use double precision (64 bit), so that the 32-bit
floating point math unit of the Teensy 3.6 does not
achieve an adequate performance. In contrast, the
64/32-bit floating point math unit of Teensy 4.1 can
process these algorithms much faster. Furthermore,
Teensy 3.6 cannot allocate all variables in RAM, so it
must use slower memories. Nevertheless, Teensy 4.1
can easily work with its tightly coupled memory (i.e.,
ITCM and DTCM). For this reason, we support
choosing the Teensy 4.1 device for our system over
other hardware options.
As an alternative approach to improve the system
latency, we applied the RAW data from PDAT to feed
the one-class SVM classifier. Table 5 shows the
processing time for this approach where it can be
compared how the processing times of the PDAT
signal are lower than for the STFT.
Table 5: Comparison of total processing times for the
implemented approaches.
Proc. unit STFT Proc. PDAT Proc.
I7-3770K @3.9MHz 6.2 ms 2 ms
Raspberry Pi Zero
2W@1GHz
48 ms 4.6 ms
Teensy 4.1 @600Mhz 31 ms 4 ms
Teensy 4.1 @396Mhz 47 ms 6 ms
Teensy 4.1 @150Mhz 124 ms 16 ms
Teensy 3.6 @180Mhz 580 ms 100 ms
We selected the one-class SVM algorithm to treat
the signal signature from the STFT vs the PDAT
strategy since the AUC and memory usage weighed
more in the decision. We further tested different
versions of the one-class SVM algorithm to validate
the system (see Table 6). Although an OS-based
computer implementation could presumably be
faster, it was shown to have no significant
improvement in processing time over code executed
directly on microcontrollers.
Table 6: Processing times for different implementation of
the one-class SVM for STFT.
Proc. unit
Proc.
time (1)
Proc.
time (2)
Proc.
time (3)
I7-3770K
@3.9MHz
4.6 ms 5.8 ms 6.2 ms
Raspberry Pi Zero
2W
@
1GHz
34.7 ms 45 ms 48 ms
Teensy 4.1
@600Mhz
13 ms 15 ms 31 ms
Teensy 4.1
@
396Mhz
20 ms 23 ms 47 ms
Teensy 4.1
@
150Mhz
51 ms 59 ms 124 ms
Teensy 3.6
@180Mhz
233 ms 270 ms 580 ms
(1) STFT with preliminary data collected; (2) STFT with
new data collected and manual labelling process; (3) STFT
with data collected in other orientations and manual
labelling process
Finally, the strategy to be chosen had to satisfy an
energy consumption limit for the autonomous road
signalling system. To do this, the consumption was
analysed in a fully operational node, powering all its
elements. The RADAR was set to detect targets
moving up to 50 km/h and Teensy 4.1 was tested with
different working frequencies. Table 7 shows the
power consumption of the described device. To put
the consumption in context, Raspberry Pi Zero
reaches 1.4W running the one-class SVM algorithm
for the STFT, while the I7-3770K processor can
typically reach 80W only in idle.
Table 7: Consumption for one-class SVM with STFT.
Running frequency Current at 3.85V
Teensy 4.1 @600Mhz 220mA
Teensy 4.1 @396Mhz 170mA
Teensy 4.1 @150Mhz 140mA
4 CONCLUSIONS
Smart sensors commonly require embedded systems
with low computational resources to efficiently run
artificial intelligence in areas such as e.g., energy
efficiency, agriculture or water monitoring. With this
purpose, this paper studies the performance of a set of
smart autonomous nodes in the field of road safety.
The goal of this system is to discern pedestrians from
vehicles on a crosswalk by using machine learning
techniques to detect behaviour patterns. To this end,
ICSOFT 2022 - 17th International Conference on Software Technologies
388

this paper described the methodology followed to
deploy a computational model for a microcontroller
from Matlab
®
to C++. The experimentation was
carried out considering a one-class SVM classifier
with two pattern analysis strategies based on I/Q
signals and RAW data from a RADAR sensor. The
tests over 81 scenes and 4050 chunks of data labelled
achieved an AUC of 0.937 with an acceptable RAM
consumption of 500 KB, processing time of 31-124
milliseconds, and power consumption of 534-847
mW for a Teensy 4.1 microcontroller. To this end, the
experimentation compared the results considering an
I7-3770K processor, Raspberry Pi Zero and a Teensy
3.6 microcontroller.
Regarding future works, the efforts are aimed at
improving the AUC of the PDAT strategy compared
to the STFT (i.e., fix the overfitting with more scenes)
due to the advantage of the lower processing time
obtained with RAW data. We also consider applying
automatic learning techniques to optimize/reduce the
number of features of the targets utilized currently to
classify. In addition, we plan the use of open-source
tools (e.g., EmbML) as an alternative to Matlab
®
to
develop different machine learning classifiers for
resource-constrained hardware.
ACKNOWLEDGEMENTS
This paper was financed by the project “Improving
Road Safety Through Photoluminescent Signaling
and Fog Computing” (ref. P20_00113) awarded by
the General Secretariat of Universities, Research and
Technology of the Andalusian Plan for Research,
Development and Innovation (PAIDI 2020).
REFERENCES
Aliev, R.A. (2013). Fuzzy sets and fuzzy logic. In
Fundamentals of the Fuzzy Logic-Based Generalized
Theory of Decisions. Springer, Berlin, Heidelberg, pp.
1-64.
Alowaidi, M. (2022). Fuzzy efficient energy algorithm in
smart home environment using Internet of Things for
renewable energy resources. Energy Reports, 8, 2462-
2471.
Al Shalabi, L., Shaanban, Z., & Kasasbeh, B. (2006). Data
Mining: A preprocessing engine. Journal of Computer
Science, 2(9), 735-739.
Amassmir, S., Tkatek, S., Abdoun, O., & Abouchabaka, J.
(2022). An intelligent irrigation system based on
Internet of thigns to minimize water loss. Indonesian
Journal of Electrical Engineering and Computer
Science, 25(1), 504-510.
Balfaqih, M., Alharbi, S. A., Alzain, M., Alqurashi, F., &
Almilad, S. (2022). An Accident Detection and
Classification System Using Internet of Things and
Machine Learning towards Smart City. Sustainability,
14(1), 210.
Buckley, J.J., & Hayashi, Y. (1994). Can approximate
reasoning be consistent?. Fuzzy sets and systems, 65(1),
13-18.
Domínguez, J.M., Sanguino, T.J., Véliz, D.M., & de Viana
González, I.J. (2020). Multi-Objective Decision
Support System for Intelligent Road Signaling. In 15th
Iberian Conference on Information Systems and
Technologies, pp. 1-6.
Gopinath, S., Ghanathe, N., Seshadri, V., & Sharma, R.
(2019). Compiling KB-sized machine learning models
to tiny IoT devices. In 40th ACM SIGPLAN Conference
on Programming Language Design and
Implementation, pp. 79-95.
Ibrahim, A.M. (2004). Embedded fuzzy applications. Fuzzy
Logic for Embedded System Applications, 69-98.
Lozano Domínguez, J.M., Al-Tam, F., Mateo Sanguino,
T.J., & Correia, N. (2021). Vehicle Detection System
for Smart Crosswalks Using Sensors and Machine
Learning. 18th International Multi-Conference
Systems, Signals & Devices, pp. 984-991.
Lozano Domínguez, J.M., & Mateo Sanguino, T.J. (2018).
Desing, Modelling and Implementation of a Fuzzy
Controller for an Intelligent Road Signaling System.
Complexity, article ID 1849527.
Mamdani, E.H. (1977). Applications of fuzzy set theory to
control systems: a survey. In Fuzzy automata and
decision processes. Amsterdam: North-Holland, pp.
77-88.
Rahman, H., Faruq, M.O., Hai, T.B.A., Rahman, W.,
Hossain, M.M., Hasan, M., Islam, S., Moinuddin, M.,
Islam, M.T., & Azad, M.M. (2022). IoT enabled
mushroom farm automation with Machine Learning to
classify toxic mushrooms in Bangladesh. Journal of
Agriculture and Food Research, 100267.
Raj, S. (2020). An efficient IoT-based platform for remote
real-time cardiac activity monitoring. IEEE
Transactions on Consumer Electronics, 66(2), 106-
114.
Sankaranarayanan, S., & Mookherji, S. (2021). SVM-based
traffic data classification for secured IoT-based road
signaling system.
International Journal of Intelligent
Information Technologies, 15(1), 22-50.
Singla, M., & Shukla, K. K. (2020). Robust statistics-based
support vector machine and its variants: a survey.
Natural Computing and Applications, 32(15), 11173-
11194.
Sugamar S.J., Sahana, R., Phadke, S., Prasad, S., &
Srilakshmi, G.R. (2021). Real Time Water Treatment
Plant Monitoring System using IoT and Machine
Learning Approach. In International Conference on
Design Innovations for 3Cs Compute Communicative
Control (ICDI3C), pp. 286-289.
Zanella, A., Bui, N., Castellani, A., Vangelista, L., & Zorzi,
M. (2014). Internet of things for smart cities. IEEE
Internet of Things journal, 1(1), 22-32.
Performance Analysis of an Embedded System for Target Detection in Smart Crosswalks using Machine Learning
389
