
Systematic Literature Review of Data Exchange Strategies for
Range-limited Particle Interactions
Theresa Werner
1
, Ivo Kabadshow
2
and Matthias Werner
1
1
Department of Operating Systems, Chemnitz University of Technology, Chemnitz, Germany
2
J
¨
ulich Supercomputing Centre, J
¨
ulich, Germany
Keywords:
Communication, Distributed Memory, Molecular Dynamics, Spatial Decomposition, HPC.
Abstract:
Molecular dynamics simulations (MDS), no matter in which form, have always spent a lot of effort on the
time-consuming part of direct particle-to-particle interactions (O(N
2
)). Even if the interaction radius of each
particle is limited, it remains the most time-critical part, especially when increasing the number of compute
nodes to calculate on. This Systematic Literature Review (SLR) focuses on the spatial decomposition approach
to MDS and ways to optimize its data exchange. We gathered and compared available concepts related to
range-limited interactions and investigated whether they show similarities and how those can be categorized.
Based on the findings, we can summarize that all communication schemes are derived from the same basic
idea, the so-called shift communication. The concepts differ in which data is communicated and how nodes
calculate the forces between particle pairs. Two categories can be distinguished here: home-box-centric and
neutral territory methods.
1 INTRODUCTION
Scientists already predicted that in the future the high
performance sector would no longer be computation-
bound but become communication-bound (Chan-
dramowlishwaran and Vuduc, 2012). HPC networks
would grow from several dozens of nodes to several
thousands, and in order to make use of that hardware,
not only synchronization strategies but also commu-
nication strategies must be applied to HPC problems.
One such problem in HPC occurs in molecular dy-
namics simulations (MDS), or simpler, N-body prob-
lems, where a large number of particles are interact-
ing with each other. For the most accurate result in
simulation every particle-to-particle (p2p) interaction
needs to be calculated. This leads to a complexity of
O(N
2
) for N particles. Even when Newton’s third law
is applied to calculate each force only once by consid-
ering symmetry, the complexity does not change (note
here that the absolute runtime can be reduced though).
MD systems typically have hundreds of thousands to
billions of particles; a parallel all-to-all force calcula-
tion would either require repeated data exchange be-
tween nodes or expect each node to hold all the data
in every timestep. Both options are undesirable, so
scientists developed methods with reduced computa-
tional complexity O(N log N) or O(N) and opened
the field for fast summation methods in MDS, intro-
ducing a threshold for less costly force computations.
All these methods, in one way or another, make a dis-
tinction between near-field and far-field interactions.
A well-known parallelization approach to MDS is
spatial decomposition. It splits the simulation space
into small rectangular boxes and, when a fast summa-
tion method is applied, only exchanges particle data
between boxes that are no further apart than a certain
cut-off distance.
With the problem of HPC applications becoming
communication-bound in mind, this SLR focuses on
communication schemes and data exchange strategies
between boxes/compute nodes that lie beyond broad-
casting and all-to-all communication. It aims to sum-
marize all concepts found and to show connections
and similarities and it proposes a categorization for
range-limited MDS methods. We found a variety of
methods for managing the data exchange which might
at first look unrelated, but after closer investigation
they reveal a common core concept. All schemes use
some kind of shift communication, and there are two
approaches to how a node computes certain forces.
Section 2 outlines the range-limited particle inter-
action problem and its different variants. Section 3
explains the process of writing the SLR and sums up
the relevant works. Section 4 analyses and categorizes
218
Werner, T., Kabadshow, I. and Werner, M.
Systematic Literature Review of Data Exchange Strategies for Range-limited Particle Interactions.
DOI: 10.5220/0011144400003274
In Proceedings of the 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2022), pages 218-225
ISBN: 978-989-758-578-4; ISSN: 2184-2841
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Size of the import area (gray) of the black tar-
get box with different R
cut
: (a) R
cut
< b, (b) R
cut
= b, and
(c) R
cut
> b.
the found information. And Section 5 provides a sum-
mary and gives an outlook to possible future work.
2 CUT-OFF DISTANCE
Considering a spatially decomposed simulation
space, the data that needs to be exchanged in or-
der to perform all range-limited (RL) calculations de-
pends on the definition of the RL range, the cut-off
radius R
cut
. Overall there are three ways to charac-
terize RL interactions (for simplicity we assume cu-
bic boxes of edge length b): R
cut
< b, R
cut
= b, and
R
cut
> b. Figure 1 depicts those three versions of the
RL area. The target box is colored black, the sur-
rounding white boxes which overlap with the gray im-
port area defined by R
cut
are the boxes of which data
is needed for the RL interactions of the black box; the
remaining white boxes are already part of the long-
range interactions and will not be taken into account
for computation or communication, here.
Assuming that each box is handled by its own
compute node, RL p2p interactions require a varying
amount of data exchange between nodes depending
on R
cut
. Designing a communication-efficient algo-
rithm to make this transfer less costly can be a major
time safer since this exchange has to be done for each
box in every simulation timestep.
3 SLR METHODOLOGY
This section serves to familiarize the reader with the
process of finding relevant material for analysis as de-
fined by (Biolchini et al., 2005). The process consists
of three main steps: determining whether an SLR is
necessary, the planning stage that asks for the What
and How of the filtering of scientific publications, and
the execution stage that filters through the results by
different conditions and sums up the works that make
it through the filtering.
3.1 Need for an SLR
Since communication –apart from avoiding and hid-
ing it– has never been a huge topic in HPC MD prob-
lems, an SLR about optimal communication in RL in-
teractions to our knowledge has not been published,
yet. The search for possible reviews has been done
with the following search string:
(”systematic literature review” OR ”systematic re-
view” OR ”research review” OR SLR) AND ((”com-
munication efficient” OR ”communication optimal”
OR ”communication bound”) AND (”molecular dy-
namics” OR ”n-body” OR ”fast multipole method”
OR FMM))
This search string procured five results on Google
Scholar. All of them are not systematic reviews con-
cerning this topic of data exchange in RL interac-
tions.
1
3.2 Planning
The first step in planning an SLR is to define research
questions which help to find the information that is
useful to reach the goal of the SLR. For us the goal
was to find possible similarities between the data ex-
change methods for spatial decomposition MDS and,
in hindsight to future research, what can be said about
the performance of the methods regarding commu-
nication. Hence, the research questions formulated
without any prior knowledge of the field were:
R1 Which of the three cut-off radius versions men-
tioned in Section 2 does the presented scheme be-
long to?
R2 What are assumptions of the scheme about the
particle system and the simulation space?
R3 If communication is explicitly described, what is
the message complexity/how many messages are
received/sent by one box/node for one complete
force calculation step?
The second step is to choose the digital library
(e.g. IEEE Explore). In order to evaluate which plat-
form is most suitable to deliver a diverse result for the
review topic, the following two search strings have
been used:
S1 (”communication efficient” OR ”communication
optimal”) AND (”molecular dynamics” OR ”n-
body” OR ”fast multipole method” OR FMM)
AND NOT ”machine learning”
1
The keywords astrodynamics, fluid dynamics, weather
simulation, and aerodynamics are excluded due to preced-
ing research regarding whether their commonly used algo-
rithms are suitable to solve the problem of RL interactions.
Systematic Literature Review of Data Exchange Strategies for Range-limited Particle Interactions
219

Table 1: Number of Search Results Sorted by Platform.
Digital Library Results S1 Results S2
Google Scholar 294 ≈ 2780
Springer Link 16 491
Science Direct 17 376
ACM Digital Library 7 79
IEEE Explore 5 22
S2 ”molecular dynamics” AND (”spatial decomposi-
tion” OR ”range limited” OR ”distance limited”)
String S2 hereby serves to cover the halo of works
around search string S1 where information might be
hidden because of not being mentioned explicitly in
the title or abstract. Table 1 shows the number of
results per platform for both search strings. Google
Scholar clearly has the biggest variety and hence shall
be used for finding material for this SLR.
2
Understandably, not all results are vital to the
SLR. Thus, in order to give the SLR a clear scope, in-
clude (I) and exclude (E) criteria must be defined: The
source I1 explicitly targets data exchange for the RL
interactions, I2 explicitly targets distributed memory
simulations, E1 does not work with spatial decompo-
sition, E2 optimizes data exchange by explicitly han-
dling shared memory, E3 focuses on load balancing,
E4 mentions the use of GPUs, E5 only uses MD as
means to an end, E6 uses the search string keywords
in a different context or with a different meaning (out-
side the domain).
3.3 Execution
3.3.1 Filtering Sources and Information
The results of the search are first filtered by title and
second by abstract (and introduction, and conclusion).
The sources matching these two pre-selections are
read in full and evaluated once more regarding use-
fulness while redundancies are removed and promis-
ing references are looked up. Table 2 shows how the
number of sources is reduced in each step.
Now it needs to be decided which information
apart from the explanation of the scheme should be
included in the review. The information to in- or ex-
clude derived from the research questions is: in1 the
length of the cut-off radius R
cut
with respect to the
box size b, in2 the number of messages required
2
The keyword cell-based, although commonly used in
molecular dynamics, is excluded because it only leads to
results regarding human cells (cancer treatment) and does
not help procuring content related to p2p interactions. The
keywords nearest neighbor and distributed memory were
checked as well and found to yield no relevant results.
Table 2: Number of Search Results After Manual Filtering.
Filter Step Results S1 Results S2
Google Scholar 294 ≈ 2780
Selection by title 15 56
Selection by abstract 6 13
Selection by full text 4 3
Found in references +0 +2
Redundancies -1 -1
Total 3 4
for the force calculation and application of one sim-
ulation timestep. Communication complexity (per
box) if available, in3 distribution of data (how many
boxes per node). ex1 Specific implementation details,
ex2 physics.
3.3.2 Summary of Sources
Source 1: Molecular Dynamics Simulations on
Distributed Memory Machines
Liem, Brown, and Clarke (Liem et al., 1991) made
it their goal to avoid redundant force calculation and
to minimize inter-processor communication. They
achieved it by making use of “proxy” communication
and a smart force calculation method. First, they de-
composed their rectangular 2D simulation space into
small squares and distributed those squares in big-
ger rectangular tiles over a k-ary 2-cube
3
. Since they
choose their cut-off radius to be equal to the box
size b, each node only needs to communicate parti-
cle data of boxes lining the “northern” (N) and “east-
ern” (E) boundaries of their dedicated tile. First, all
nodes send their N+E particle data to their neigh-
bor node in the north while simultaneously receiving
the particle data from their south neighbor (Fig. 2a).
Next, they combine their own particle data with the
data from the south neighbor and send both data
sets to the east neighbor; simultaneously they receive
the west and south-west data from their west neigh-
bor (Fig. 2b).
They also proposed a rule that defines which pro-
cessor has to calculate which force interactions other
than between particles of its own tile. Figure 2c illus-
trates which processor needs to calculate forces be-
tween which particle sets. The white lines between
two differently colored patches mean calculating the
forces between those particles. The figure is incom-
plete for all but the yellow processor because the grid
is incomplete.
Last, the forces are sent back by first sending all
results to the west neighbor and simultaneously re-
3
k-ary n-cubes is a categorization derived from (Tang,
1992), see Source 2.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
220

Table 3: Characteristics of (Liem et al., 1991).
cut-off R
cut
= b
data
distribution
uniform distribution of tiles of
boxes over nodes (multiple boxes
per node)
Figure 2: (a) and (b) depict the two steps of particle data
communication. The force data is distributed in the reverse
pattern. (c) A white line between data patches denotes that
the forces between these sets need to be calculated on that
node; some pairs are missing since the node grid is incom-
plete.
ceiving from the east neighbor; the force data of the
east neighbor is combined with the own force data and
the whole package is sent south, while receiving the
forces from N and NE from the north neighbor. Each
node can now update its local particles.
For the three-dimensional case, this method is also
known by the name Eighth-Shell (ES) Shift.
Source 2: Pipelined Global Data Communication
on Hypertoruses
(Tang, 1992) present several effective ways of global
communication on hypertori. Since the architecture
of 3-cube hypertori resembles the spatial decompo-
sition of MDS, this paper has been included in this
review. The methods described can easily be trans-
formed into data exchange methods for RL interac-
tions. The categorization of hypertori by describing
them as k-ary n-cubes is also derived from this paper
and means hypercubes which have n dimensions with
k nodes in each dimension.
Tang first quotes (Saad and Schultz, 1989) on their
so-called alternate direction exchange method, which
proposes to split a binary n-cube into two binary (n −
1)-subcubes, consecutively in each direction. Hence,
a binary 3-cube is first split into two binary 2-cubes
and then into 4 binary 1-cubes. Tang generalizes this
approach to splitting a k-ary n-cube into k k-ary (n −
1)-cubes; Figure 3 shows the splitting for a 3-ary 3-
cube following that rule.
The communication is now performed in a daisy-
chain manner that can be generalized as: first, the data
is daisy-chained along dimension one; for each fol-
lowing dimension up to n, the accumulated data of
each chain is daisy-chained along the paths of that di-
Table 4: Characteristics of (Tang, 1992).
cut-off R
cut
≤ b, R
cut
> b
data distr. —
Figure 3: Splitting the hypertorus: the 3-ary 3-cube in (a) is
first split into 3 3-ary 2-cubes like in (b) and then into (3x3)
3-ary 1-cubes like in (c).
mension.
A simulation with a cut-off distance does not re-
quire global communication. Daisy-chaining the data
all around the cube is not necessary. By introduc-
ing a sense of direction, communication can be re-
duced. Data is transmitted along one dimension j in
two phases. Phase one forwards the data in the first
direction for as many steps as the cut-off distance is
long. For the second phase, the transmission is flipped
around and the data is handed down into the opposite
direction. This is applied to all j dimensions, and now
each node only has a subset of the data of the whole
simulation space. The next SLR source does exactly
that.
Source 3: Fast Parallel Algorithms for
Short-range Molecular Dynamics
(Plimpton, 1995) introduces what will later be called
Full-Shell (FS) Shift communication. It can be con-
sidered an adjusted version of Tang (Source 2) or a
version of Liem (Source 1) but without using New-
ton’s third law or force decomposition to further re-
duce the number of messages.
The communication of one box/node takes place
in three phases and is limited to its six immedi-
ate neighbors called East (E), West (W), North (N),
South (S), Up (U), and Down (D). First, the particle
data of the box is sent to the West and particle data
from the East is received, then vice versa (see Fig. 4a).
Next, the accumulated data from the box and its E and
W neighbors is sent to the North, while the SW, S, and
SE data is received from the the South. And in return,
the data is sent to the South and the NW, N, and NE
data is received from the North (see Fig. 4b). Lastly,
the data of the whole plane is sent up and down and
the data of the U and D planes are received in return
(see Fig. 4c). If R
cut
< b only the relevant data is sent,
and if R
cut
> b the neighbors help handing down the
data like in Source 2.
In case of R
cut
≤ b, the communication finishes
after six messages and each node can compute all the
Systematic Literature Review of Data Exchange Strategies for Range-limited Particle Interactions
221

Table 5: Characteristics of (Plimpton, 1995).
cut-off R
cut
≤ b, R
cut
> b
data distr. one box per node
Figure 4: Full-Shell Shift communication: The black boxes
data is first distributed along the axis of red boxes (a), then
along the axis of yellow boxes (b), and last among the blue
boxes (c). The blue boxes are incomplete for visualization
purposes. The lines are the paths along which the data is
spread.
forces it needs in order to update its particles. In case
of R
cut
> b, the number of messages sums up to 6k
with k = ⌈R
cut
/b⌉.
Source 4: Zonal Methods for the Parallel
Execution of Range-limited N-body Simulations
The work of (Bowers et al., 2007) is based on two
works, (Snir, 2004) and (Shaw, 2005). Both earlier
works find that the broadcast for the force decom-
position has the property that “for any two proces-
sors p
1
and p
2
, there is a processor p
3
so that both
p
1
and p
2
send all their data to p
3
. Then p
3
can
compute all interactions between atoms from p
1
and
[. . . ] p
2
(Snir, 2004).” Based on this property they de-
signed spatial and force decomposition hybrids: (Snir,
2004) worked this idea into his Base-Comb model
(advanced version see Fig. 5 upper left) and (Shaw,
2005) into the idea of tower and plate.
(Bowers et al., 2007) realized that the two ideas
were two versions of the same basic concept. They
compared the two methods’ shared properties and in-
troduced the general class of neutral territory meth-
ods. Derived from Snir and Shaw they first intro-
duced the two-zone methods. Apart from reviewing
the Base-Comb and Tower-Plate method, they devel-
oped the Cloud, City, and Foam methods depicted in
Figure 5. To make sure that these rather complex sets
are able to cover the simulation space without missing
pairs of interacting boxes, Bowers et al. put the so-
called convolution criterion in place which says that
the coverage region must include the whole influence
region. Influence region here means the region that is
defined by the cut-off radius around the box in ques-
tion; the coverage region is the area from which the
box in question imports data (as implied, it might be
bigger than the area defined by R
cut
).
Next, Bowers et al. introduced k–zone methods.
Table 6: Characteristics of (Bowers et al., 2007).
cut-off R
cut
> b
data distr. one box per node
Figure 5: Two-zone methods (Bowers et al., 2007): upper
left is Snir’s hybrid refined by Shaw, upper right is the cloud
method, lower left is the city method, and lower right is the
foam method.
This is similar to idea presented by Liem (Source 1)
but with the goal of overlapping communication with
computation instead of reducing communication. By
defining a rule about which particle set interactions
must be calculated when they defined a schedule for
the force calculation that is based on the arrival of the
remote data packets. The further away a box/node is,
the later it appears in the schedule. They applied this
method to the Base–Comb, Tower–Plate, and eighth
shell ideas.
Two-zone methods and k-zone methods make up
the whole of zonal methods.
Source 5: Scalable Algorithms for Molecular
Dynamics Simulations on Commodity Clusters
In this work (Bowers et al., 2006) aimed to decrease
the import region and introduce their MD code named
Desmond. It uses the midpoint method to determine
which force pairs should be calculated on which node,
meaning each node only calculates the forces for par-
ticle pairs of which the midpoint of the distance lies
within their dedicated area. Figure 6 illustrates the al-
location of particle pairs to processors; the midpoints
(crosses) mark on which node the force between the
pair of particles is calculated; missing particle data
needs to be imported.
The pairs handled by one node cannot be further
apart than R
cut
/2 because they do not interact when
further apart than R
cut
, so if one particle is further
from the node’s area than R
cut
/2, the midpoint will
not be within its area. This fact reduces the import
area per node compared to methods with the “classi-
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
222
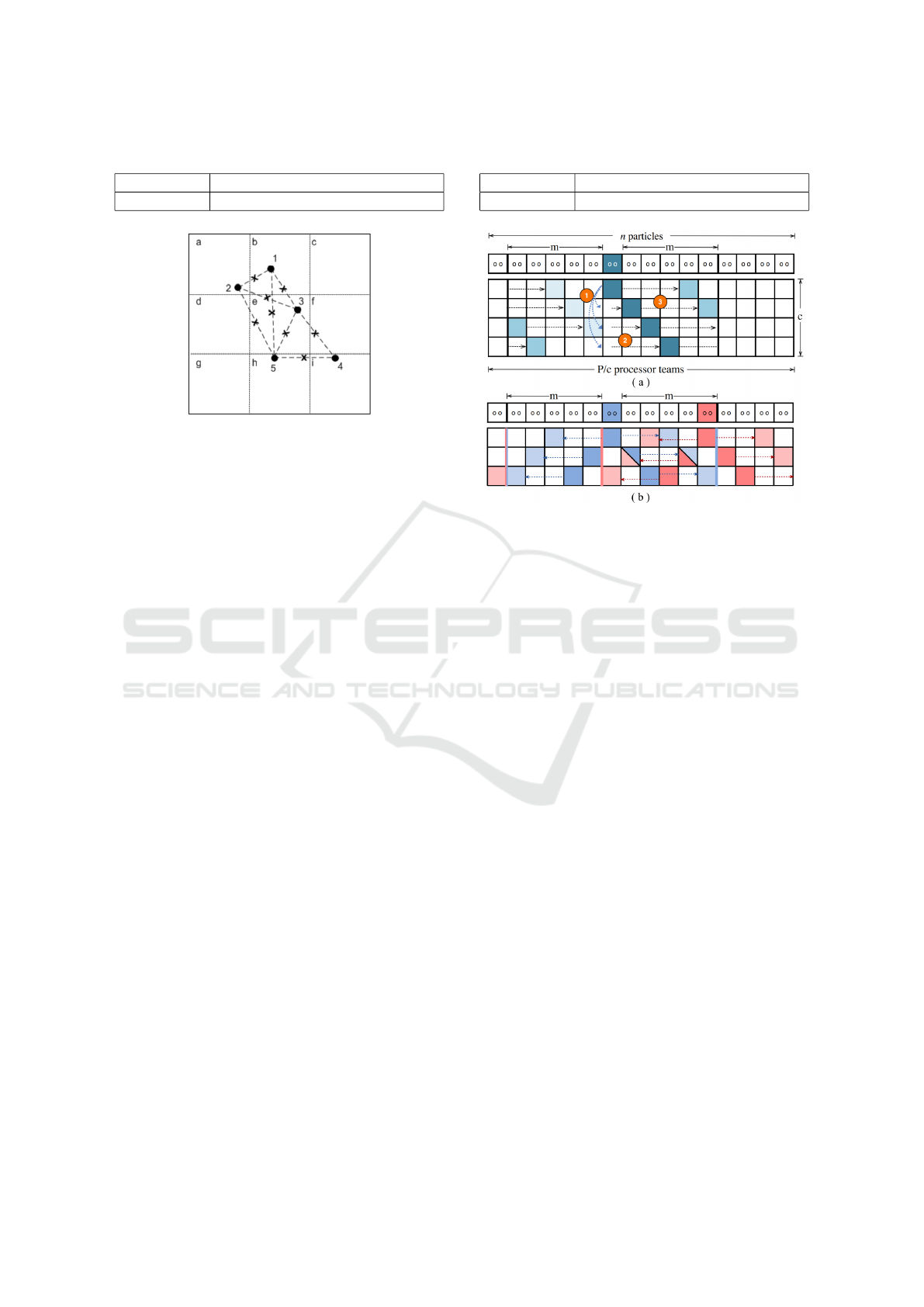
Table 7: Characteristics of (Bowers et al., 2006).
cut-off R
cut
< 2b
data distr. one box per node
Figure 6: Midpoint method: a particle pairs’ midpoint
(cross) determines the box in which their interaction force
is calculated (Bowers et al., 2006).
cal” use of the cut-off radius. Still, the communica-
tion algorithm is the same as described by Plimpton,
sending 6k messages to the six nearest neighbors.
Source 6: A Communication-optimal N-body
Algorithm for Direct Interactions
Driscoll, Georganas, and Koanantakool (Driscoll
et al., 2013) focused on the all-to-all particle inter-
action by atom decomposition, but they also use their
approach on RL interactions with spatial decomposi-
tion (although not quite correctly), so they shall be
discussed next. Their basic idea is to allocate a group
of processors per box to reduce communication.
Their all-to-all atom decomposition approach
works as follows: Assuming we have 64 processors
P = 64 and we dispatch four processors per team c =
4 (c standing for copy), we would have T = P/c = 16
processor teams. Each processor team leader receives
the data for N/T random particles and hands it down
to the other processors of the team (step 1 in Fig-
ure 7a). Next, that data is shifted askew like dis-
played in step 2 of Figure 7a, the maximal shift dis-
tance being c − 1 = 3. After this, the data is shifted
in equidistant steps of c along the processor rows un-
til it wraps around the whole simulation space once
(step 3 in Figure 7a but for the whole space). In
our example this would be given after T /c = 4 shifts.
Last, by having a reduction step, the data of the whole
team is gathered by the team leader. The authors as-
sume that the distribution and reduction steps each
have a communication complexity of O(log c), the
skewing shift of O(1), and the equidistant shifts of
O(T /c) = O (P/c
2
), so we end up with a communica-
tion complexity of O(P).
For the case of RL interactions, the method
Table 8: Characteristics of (Driscoll et al., 2013).
cut-off R
cut
> b
data distr. one box per processor group
Figure 7: Processor Teams: (a) the original idea of (Driscoll
et al., 2013) for the RL interactions: a wrap-around at the
cut-off distance m with fixed import region. (b) The revised
idea that considers the import region being unique for each
box and chooses c based on m by c = (m +1)/k.
changes slightly. Now, particles are no longer ran-
domly allocated to teams but boxes of the spatial de-
composition are assigned to teams. Thus, there is
awareness of the particles’ spatial coordinates. While
distribution, reduction, and initial skewing shift re-
main unchanged, the equidistant shift now wraps
around the cut-off radius m as shown in Figure 7a.
However, by splitting the space into four static re-
gions, the authors do not consider that the import re-
gion is unique for each box. Their static approach
leads to the box in the middle of the region being the
only one satisfied while all other boxes do not receive
all the data they require or receive data they do not
even use. Either this approach must be refined or it is
essentially unusable for the cut-off problem.
But as we think back to Tang (Source 2) the de-
scribed algorithm reminds us a lot of daisy-chaining
the data but in a multi-layered way. Thus, the same
changes as we applied to Tang should be applicable
here and make this feasible for simulations with a
cut-off. We discard the wrap-around at the cut-off
distance and instead perform the shift in two differ-
ent directions. In order not to waste processors by
having some of them idle, we choose c with respect
to m. For the 1D problem displayed in Figure 7a,
one can choose c = ⌈(m +1)/k⌉ with k ∈ N. Why
m + 1? Because the center box itself must be taken
into account. By setting c = ⌈(5 +1)/2⌉ = 3 it takes
one initial skewing shift and one equidistant shift to
Systematic Literature Review of Data Exchange Strategies for Range-limited Particle Interactions
223

Table 9: Characteristics of (Wang et al., 2020).
cut-off R
cut
< b
data distr. one box per node
Figure 8: Ghost communication mode: in case of R
cut
< b,
the box is split into corner (blue), edge (yellow), and face
(red) subboxes; the edge length of the corner cubes is equal
to R
cut
. A message comprises of a recombination of the
subboxes, thus no superfluous data is sent to the neighbor
boxes.
the left and right each by every team in order to dis-
tribute the data; Figure 7b shows this adapted version.
Obviously, this needs a synchronization step before
changing direction, but if Newton’s third law is ap-
plied, the right shift happens before the force calcula-
tion and the left shift afterwards. For higher dimen-
sions than 1D this method must be refined some more,
but it should be safe to assume that the result will be
some kind of multi-layered Shift communication. For
now, this revised version also has a communication
complexity of O(P).
Source 7: Communication Optimization Strategy
for Molecular Dynamics Simulation on Sunway
TaihuLight
(Wang et al., 2020) are concerned with optimizing the
data packages in case of a cut-off radius smaller than
the box width. Their goal is to send only the strictly
necessary data to the respective recipient.
The idea of Wang et al. is to split each box into
corner (blue), edge (yellow), and face (red) subboxes
(see Fig. 8). The subboxes act like a padding inside
the box with thickness R
cut
. Each message to one of
the six nearest neighbors comprises of a recombina-
tion of these subboxes composed of one face, four
corner, and four edge subboxes. The communication
they use, is the shift communication from Plimpton
(Source 3) with k = 1, so the total amount of mes-
sages for one simulation timestep is six per box.
4 ANALYSIS
The goal of this SLR is to find similarities between the
data exchange methods in order to categorize them.
We formulated three research questions in Subsec-
tion 3.2 the first of which asks for the version of the
Figure 9: Categorization: We decided on a three-layered
categorization. The bottom layer is about the communica-
tion scheme chosen, the middle layer about the What and
Where of the data, and the top layer about applying New-
ton’s third law or not.
cut-off radius. Finding similarities based on the cut-
off radius yields no definite results. Many schemes
can be used on all three versions and one even fits
into none of the three categories (Source 5). Regard-
ing assumptions about the system the result is equally
inconclusive. An interesting observation, however, is
that all authors who propose an explicit communica-
tion scheme use the same idea: shift communication.
By making different use of received data e.g. calcu-
lating forces between particles which are not part of
the processor’s home box or making use of Newton’s
third law, different versions of the shift came into use
e.g. ES, HS, FS Shift. Even the processor team idea of
(Driscoll et al., 2013) (Source 6) is an advanced shift
communication for the revised cut-off version. Why
is it advanced? Because by using processor teams it
scales with O(P) whereas all classic shift communi-
cation versions scale with O(P
1/3
). Apart from this,
one can categorize the sources into home box and
neutral territory methods. Sources 3, 8, and 9 are
home box methods aiming to satisfy the node’s home
box with the data it needs for calculating the forces on
its particles. Sources 1 and 4 to 7 are neutral territory
methods where each processor also calculates forces
between two foreign particles and does not receive
enough data to calculate all forces on its own parti-
cles by itself. And last, Newton’s third law might be
applied to both approaches to reduce redundant force
calculation further.
Thus, we categorize this field of spatial decompo-
sition MDS with RL interactions as depicted in Fig-
ure 9. We differentiate between three layers. The bot-
tom layer is about the communication scheme which
can either be a version of the shift communication or
trivial in the form of e.g. a broadcast. The middle
layer is concerned with the What and Where of the
data and calculations. Here one can choose between
home box methods or neutral territory methods. And
last, Newton’s third law may or may not be applied to
reduce redundant force calculation. In case of choos-
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
224

ing shift communication, the middle and upper cate-
gorization layer may influence the decision regarding
the shift version.
5 CONCLUSION
5.1 Summary
This SLR gathered scientific works on data exchange
strategies for range-limited interactions in MDS and
aimed to find similarities between these works in or-
der to propose a categorization. Its target were spatial
decomposition approaches, which split the simulation
space into small rectangular boxes that are then dis-
tributed over the compute nodes.
As it turns out, all sources that introduce an ex-
plicit communication scheme use the same idea called
shift communication (see Fig. 4). Apart from that,
one can distinguish between two categories of data
selection strategies: home-box-centered methods that
aim to satisfy the home box or home node with all the
data required to calculate the forces on its particles,
and neutral territory methods that have nodes calcu-
late forces between particles which do not reside in
the node’s home box. Additionally Newton’s third
law (N3L) may be applied to reduce redundant force
calculations. Thus, we propose the three-layered cat-
egorization displayed in Figure 9 where the bottom
layer is concerned with the selection of the communi-
cation scheme, the middle layer with what data should
be moved where, and the top layer with whether N3L
is applied or not.
5.2 Future Work
Future work could be the design of a 2D and 3D
processor team algorithm as proposed by (Driscoll
et al., 2013) and applying communication schemes to
higher levels in MDS, for example for the interaction
of multipoles on the same tree depth in the Fast Mul-
tipole Method (FMM).
ACKNOWLEDGEMENTS
This research was funded by DFG project FMHub,
project Nr. 443189148.
REFERENCES
Biolchini, J., Gomes Mian, P., Cruz Natali, A. C., and
Horta Travassos, G. (2005). Systematic review in soft-
ware engineering. In Technical Report RT-ES 679-05,
COPPE/UFRJ PESC.
Bowers, K. J., Chow, D. E., Xu, H., Dror, R. O., East-
wood, M. P., Gregersen, B. A., Klepeis, J. L., Koloss-
vary, I., Moraes, M. A., Sacerdoti, F. D., Salmon,
J. K., Shan, Y., and Shaw, D. E. (2006). Scalable
Algorithms for Molecular Dynamics Simulations on
Commodity Clusters. In SC ’06: Proceedings of
the 2006 ACM/IEEE Conference on Supercomputing,
pages 43–55.
Bowers, K. J., Dror, R. O., and Shaw, D. E. (2007). Zonal
methods for the parallel execution of range-limited N-
body simulations. Journal of Computational Physics,
221(1):303–329.
Chandramowlishwaran, A. and Vuduc, R. W. (2012).
Communication-Optimal Parallel N-body Solvers. In
2012 IEEE 26th International Parallel and Dis-
tributed Processing Symposium Workshops & PhD
Forum, pages 2462–2465.
Driscoll, M., Georganas, E., Koanantakool, P., Solomonik,
E., and Yelick, K. (2013). A Communication-Optimal
N-Body Algorithm for Direct Interactions. In 2013
IEEE 27th International Symposium on Parallel and
Distributed Processing, pages 1075–1084.
Liem, S. Y., Brown, D., and Clarke, J. H. R. (1991).
Molecular dynamics simulations on distributed mem-
ory machines. Computer Physics Communications,
67(2):261–267.
Plimpton, S. (1995). Fast Parallel Algorithms for Short-
Range Molecular Dynamics. Journal of Computa-
tional Physics, 117(1):1–19.
Saad, Y. and Schultz, M. H. (1989). Data communication
in hypercubes. Journal of Parallel and Distributed
Computing, 6(1):115–135.
Shaw, D. E. (2005). A fast, scalable method for the par-
allel evaluation of distance-limited pairwise particle
interactions. Journal of Computational Chemistry,
26(13):1318–1328.
Snir, M. (2004). A Note on N-Body Computations with
Cutoffs. Theory of Computing Systems, 37(2):295–
318.
Tang, Z. (1992). Pipelined Global Data Communication
on Hypertoruses. Journal of Computer Science and
Technology, 7(3):247–256.
Wang, B., Chen, Y., and Hou, C. (2020). Communica-
tion Optimization Strategy for Molecular Dynamics
Simulation on Sunway TaihuLight. In 2020 IEEE
22nd International Conference on High Performance
Computing and Communications; IEEE 18th Inter-
national Conference on Smart City; IEEE 6th Inter-
national Conference on Data Science and Systems
(HPCC/SmartCity/DSS), pages 571–578.
Systematic Literature Review of Data Exchange Strategies for Range-limited Particle Interactions
225
