
Using Deep Reinforcement Learning to Build Intelligent Tutoring
Systems
Ciprian Paduraru, Miruna Paduraru and Stefan Iordache
University of Bucharest, Romania
Keywords:
Tutorial System, Reinforcement Learning, Actor-Critic, TD3, Games.
Abstract:
This work proposes a novel method for building agents that can teach human users actions in various ap-
plications, considering both continuous and discrete input/output spaces and the multi-modal behaviors and
learning curves of humans. While our method is presented and evaluated through a video game, it can be
adapted to many other kinds of applications. Our method has two main actors: a teacher and a student. The
teacher is first trained using reinforcement learning techniques to approach the ideal output in the target appli-
cation, while still keeping the multi-modality aspects of human minds. The suggestions are provided online,
at application runtime, using texts, images, arrows, etc. An intelligent tutoring system proposing actions to
students considering a limited budget of attempts is built using Actor-Critic techniques. Thus, the method
ensures that the suggested actions are provided only when needed and are not annoying for the student. Our
evaluation is using a 3D video game, which captures all the proposed requirements. The results show that
our method improves the teacher agents over the state-of-the-art methods, has a beneficial impact over human
agents, and is suitable for real-time computations, without significant resources used.
1 INTRODUCTION
Our motivation to build AI agents (teachers) that can
advise human users (students) stems from our expe-
rience in the gaming industry. What we observed in
internal reports by analyzing user data is that many of
them install a game demo or trial version on their de-
vice, but uninstall it after a short time before it brings
revenue to the developer. When we went deeper to
understand the behavior and reasons of the users, we
discovered that many of the users stop playing the
game because they do not understand the game dy-
namics or do not know how to play against other
users online. The next attempt by game developers
to fix this problem is usually to create some kind of
text tutorial system that can help users understand the
mechanics and improve their experience while play-
ing. However, a handwritten tutorial proves to be
limited as it cannot capture the multimodal charac-
teristics, usage style, and learning curves of different
users (Alameda-Pineda et al., 2018). Moreover, try-
ing to implement such systems is usually very costly
in terms of production costs.
The purpose of this work is to explore how we can
build teacher agents that can advise human students to
understand an application by giving the right sugges-
tions to improve their behavior within the application,
and at the same time without being annoying to the
user. We understand that improving their behavior di-
rectly leads to a richer, more rewarding experience on
the user side during the application. In our specific
use case, we automate tutorial systems in game de-
velopment processes. In terms of the methods used,
in short, the online system uses a novel tutorial sys-
tem that is automatically trained using reinforcement
learning (RL) to provide live advice during the appli-
cation runtime.
We also argue that the proposed methods can be
adapted to other simulation environments and appli-
cations, not just computer games. Since we evaluated
the method on an open-source 3D game, (Paduraru
and Paduraru, 2019), we assume that it would also be
suitable for many other types of applications with an
extensive input/output space and logical complexity
of behaviour, such as 3D computer-aided design, 3D
modeling software, video or photo editors, etc. The
reasons for this consideration are the following:
• The state of the game at any time is large in both
dimension and logical complexity.
• The input and output spaces of the game are com-
posed of both continuous and discrete types.
288
Paduraru, C., Paduraru, M. and Iordache, S.
Using Deep Reinforcement Learning to Build Intelligent Tutoring Systems.
DOI: 10.5220/0011267400003266
In Proceedings of the 17th International Conference on Software Technologies (ICSOFT 2022), pages 288-298
ISBN: 978-989-758-588-3; ISSN: 2184-2833
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The main contributions of this paper over existing
work can be summarized as follows:
1. To the authors’ knowledge, this is the first work
that proposes a method for building a tutoring
system using Deep Reinforcement Learning tech-
niques. The previous works closest to ours, (Zhan
et al., 2014), (Wang and Taylor, 2017), use a com-
bination of reinforcement learning and heuristics
to decide at what time to advise the user. They re-
strict the set of actions to discrete spaces, consider
bounded environmental states, and decisions are
only made instantaneously. Instead, we use mod-
ern deep learning techniques for several purposes:
(a) building the architecture of the teacher model,
(b) encoding the environmental states as embed-
dings, (c) removing the fixed heuristic thresholds
and introducing them as learnable parameters in
the model. As a result, our method is able to
retain history information and make contextual
decisions, rather than considering only instanta-
neous, and large environmental states with both
discrete and continuous inputs/outputs.
2. Previous work does not focus on qualitative evalu-
ation of trained policies (i.e., on real human users)
and mostly evaluates the results quantitatively.
Our work proposes a novel method to create an
extended environment for observing student per-
formance in accordance with the training goal,
and adapting the suggestions based on this feed-
back. We also create a reward system within our
RL methods that incorporates human in the loop
to train teacher policies that are not disruptive to
future students.
3. In the context of the gaming industry, to the au-
thors’ knowledge, this is the first work to propose
a concrete automatic method to replace scripted
tutorial systems in video game play. Our approach
has the potential to not only reduce the cost asso-
ciated with creating scripted systems for training
human users, but also to dynamically adapt to the
multimodality and high-dimensional state context
of user behavior.
The paper is organized as follows. Section 2 gives
an overview of some recent work in this area that had
an important impact on our implementation decisions.
The architecture and algorithms used are described in
section 3. The evaluation is done in section 4, while a
conclusion and some ideas for future work are given
in the last section.
The framework built and presented in this paper is
called AHRec (Agent to Human Recommender sys-
tem). Due to space constraints and double-blind re-
view requirements, more details on the visual out-
put database structure, pseudocode of the training
algorithms and parameters used, discussions and
limitations, along with a demonstration video can
be found in our supplementary material available
here: https://www.dropbox.com/sh/edc0hhlbdjb9zop/
AADYBHGJV8mJP6ezca-lontza?dl=0. (reviewer
note: these will be added and publicly available
on Github outside the main paper after peer re-
view). We also include an open-source implementa-
tion of our Teacher model with Tensorflow 2 back-
end and our test game environment at the anony-
mous Github account https://github.com/AGAPIA/
BTreeGeneticFramework.
2 RELATED WORKS
One of the papers that addresses the same problem
as ours is (Zhan et al., 2014), where the authors in-
vestigate different mechanisms to allow an AI trained
with Q-learning to train human players on a classic
Pac-Man video game. We follow their methods for
limiting the number of recommendations per session
within a given budget. The paper proposes a recom-
mendation policy in the form of π
d
(S, B, I(·), ρ(·)) →
{
π
t
, ∅
}
, where S captures the state of the student, B
is the state of the advice budget, I is a function that
evaluates the importance of the current state, while ρ
specifies the rate at which advice is displayed. When
a decision is made, similar to our work, the best action
to the teacher’s knowledge is given (π
t
). The impor-
tance function is computed using a formula similar to
that used in apprentice learning (Clouse and Utgoff,
1996), I(s) = max
a
Q(s, a) − min
a
Q(s, a). The algo-
rithms used by the authors then use different thresh-
olds based on budget B, outcome I, and ρ to schedule
the generation of teacher advice. There are five main
improvements that our work addresses over this work:
(a) Our method uses a full deep neural network to
represent the teacher’s state, using embedding layers.
Previous work uses function approximation based on
heuristics to represent the state. (b) Our method also
considers an augmented state of the teacher that tracks
the progress of the student and adapts to their needs
over time, (c) we use a full RL method that uses Deep
Learning to learn not only the importance of actions,
the advice policy, but also the thresholds, rather than
using simple heuristics that do not adapt or learn from
existing real data, (d) we consider the order of actions
in the decisions by using a recurrent neural network
architecture; previous work only considers the current
state when a decision is made, (e) Our actions can be
proposed at both a low-level and high-level granular-
ity to make them more explainable to human users.
Using Deep Reinforcement Learning to Build Intelligent Tutoring Systems
289

In (Wang and Taylor, 2017), the authors study the
problem of training an AI agent using the knowledge
of a teacher agent (which could be a human or another
AI agent) as a prior. In our work, we apply the in-
verse of this method by training a teacher agent using
human expert demonstrations, which in turn can train
new human students. The idea behind their work is to
take a pre-trained teacher model that is used as a prior
to bootstrap the values of states and action pairs at the
beginning of the training of the student model. They
prove that this initial prior can speed up the training
process and make the student outperform the teacher
faster. The CHAT method uses a confidence measure
computed by one of the following three methods to
detect the uncertainty in the teacher’s recommenda-
tion: (a) GPHAT (Gaussian processes with variances
and medians for actions learned from data), (b) a two-
layer neural network that computes the confidence of
actions in different states using a softmax regressor
(the network is trained with user-supplied inputs), (c)
DecisionTreeHAT , which uses a decision tree classi-
fier where leaf nodes assign costs. The student con-
siders the advice sent by the teacher with probability
Φ. This value decays after each episode, being close
to 1 at the beginning of the training process and de-
creasing to almost 0 when the agent can start acting
independently to give it a chance to outperform the
teacher. If the advice sent by the teacher to the student
has a confidence value greater than a fixed threshold,
then the student chooses the sent advice as the next
action. If it does not, he performs his own guess ac-
cording to his running training policy. The student
is also allowed to explore with the classical decision
factor ε (exploration vs. exploitation). Thus, there is
a ε probability for exploration, Φ for transferring the
action from the teacher to the student, and 1 − ε − Φ
for acting according to its own current policy. The
same DQN methods similar to (Zhan et al., 2014) are
used as RL algorithms.
Even though the purpose was to train AI agents
and not humans, their method can be transferred to
improve the work in (Zhan et al., 2014) as we identi-
fied in this paper, and also be relevant for training hu-
man agents. In short, we tried to extend the work in
(Zhan et al., 2014) by multiplying the importance of a
state, I(s), with the confidence value computed by the
CHAT methods. The intuition behind this is to lower
the importance of decisions when there is a large un-
certainty behind the recommended actions. Their so-
lution is also important to us because we reused the
idea of a confidence value from their work. However,
instead of setting a confidence threshold, when taking
decisions, we instead set this as a learnable parameter
within the models.
There are also several papers that approach the
same core problem as we do, but for the educational
field. In (Martin and Arroyo, 2004) and its sequel
(Sarma and Ravindran, 2007), the authors build a
graph between the skill set and the available hints to
cluster and train simple policies for asking questions.
In (Beck et al., 2000), (Malpani et al., 2011), and
(Ausin et al., 2019), policies are trained to ask a set
of questions that have predefined difficulties. When
performing actions, the policy correlates correctness
and response time from previous responses with the
available set of questions to ask next. The methods
used include recurrent neural networks (LSTMs) and
Gaussian Processes, to infer immediate rewards from
delayed rewards as a mechanism to improve policy
outcomes. In (Peltola et al., 2019), a Bayesian multi-
armed bandit method is used to build the model of a
teacher. While the ideas from the educational field are
valuable and provide insights for our methods, we be-
lieve that these approaches are not currently suitable
for real-time applications such as computer games
due to their limitation to the state and action space.
Both are discrete and limited in the number of possi-
ble decisions. In addition, their training mechanisms
consider human interaction in a way that is not use-
ful for our purposes. Our proposal incorporates user
feedback into episodes in an optional manner, rather
than forcing interaction at each time step.
3 PROPOSED METHODS
3.1 Overview
There are two main actors used in our method:
Teacher and Student. The Teacher agent can give
suggestions at runtime, depending on its observations
over Student’s behavior and the state of the environ-
ment in which the Student operates. The intuition is
to let the Teacher agent observe the sequence of ac-
tions and states of the Student and then act in a way
that both balances the utility of the suggestions and
keeps the user in an entertaining mode without show-
ing them too often or when not necessary.
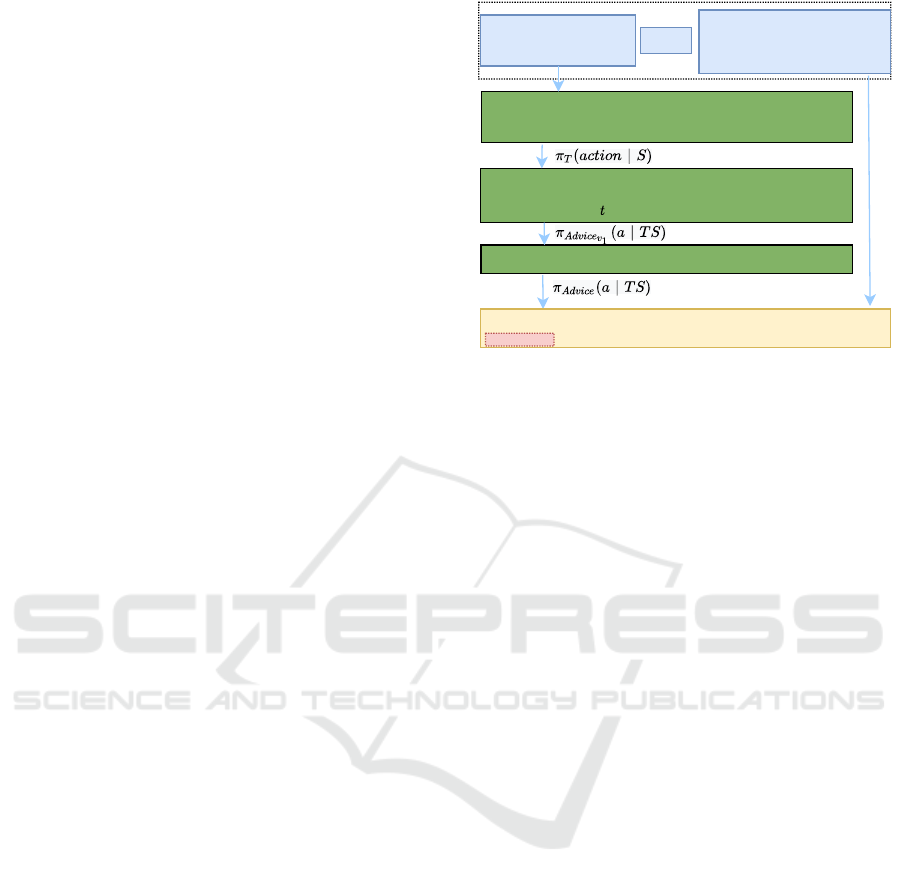
The high-level flow for obtaining the policies that
decide when and what suggestions to give is shown in
Fig. 1. There are three policies that are trained for a
Teacher.
1. A suggestion making policy π
T
that can be sam-
pled (a
t
∼ π
T
) to query what is the action the
Teacher would do in the Student’s application
state (environment state) S at time t. In the first
step, a Teacher suggestion policy is trained within
the application using a policy-based RL technique
ICSOFT 2022 - 17th International Conference on Software Technologies
290
where rewards are learned from Generative Ad-
versarial Imitation Learning (GAIL) (Ho and Er-
mon, 2016) by observing how real people (con-
sidering only the best available demonstrations)
use the application. The methods used restrict the
model to human comprehensible teaching meth-
ods (i.e., space of possible actions). The assump-
tion is that the agent trained with the above set-
tings will generally make the ideal decisions and
still be able to handle human multimodal behavior
by using a learned stochastic policy that maps the
probability of actions from the given states. This
is done in Step 1 in Fig. 1.
2. A policy that can be sampled to find out whether
the Teacher should send or not send a sugges-
tion at a given time step t: a
t
∼ π
Advice
v1
. This
is an intermediate policy, as shown in Step 2, Fig.
1. It takes into account observations about how
the trained Student performs (detailed in the next
subsections), along with the context of the previ-
ously sent suggestions and feedback. As detailed
in Section 3.2, in this step the Student does not ex-
plore the environment at all, but takes steps using
only his current knowledge and the suggestions
sent by the Teacher.
3. The final version of the suggestion making policy,
π
Advice
, is obtained in Step 3 by fine-tuning the pa-
rameters using human-sensitive feedback that lies
behind the Student agents and provides qualitative
information about the sequence of suggestions re-
ceived.
Note that π
T
is trained statically using demon-
stration data provided by experts, and remains fixed
during the training of π
Advice
. The second does not
require human supervision at all, but human feed-
back can optionally be included if the user responds
to various feedback questions while using the tutor-
ing system. The π
Advice
policy is trained with a class
of Actor-Critic methods, specifically T D3 (Fujimoto
et al., 2018). Given an embedding of the teacher’s ob-
servations as a state, the policy outputs the probability
of showing or choosing not to show a suggestion to
Student, which is further sampled from π
T
. Episodes
consist of trajectories of the agent Teacher suggesting
or not suggesting things at certain time steps. Each
episode lasts until either a threshold for the number of
suggestions is reached, MST , or a game session ends.
The rewards, which consist of two components - the
agent’s performance relative to some trainable goals
and any human sensitive feedback returned - are intu-
itively used to improve the policy’s rewards over time
by handling the correct moments at which sugges-
tions should be made. Higher rewards mean higher
performance for the Student agent’s learning curve.
Step 1: Teacher model
Train a teacher model to act optimally in the Student's environment by
learning from experts using GAIL method.
time (automatic, no human factor)
state)
Collection of human
experts demonstrations
Visual artifacts shown by filtering the database against the received
advice and game context
Inputs
Output
Step 2: Teacher Recommendation system (part 1)
Train a teacher model to decide whether to send an advice or not at
any
Step 3: Teacher Recommendation system (part 2)
Fine-tune the model with human sensitive feedback
Database suggestions pairs of
(Visual artifacts, application
Figure 1: The flow to obtain the Teacher’s policies (π
T
in
Step 1, then π
Advice
from Step 2 and 3), and finally the visual
output for the human user.
Negative feedback from human users (e.g., disruptive
or incorrectly displayed hints) penalizes the Teacher
agent’s reward.
The output of the tutoring system, i.e., the sug-
gestions of a trained Teacher to the Student, are con-
veyed in visual form. The transformation works as
follows. Each visual suggestion contains a set of arti-
facts such as text, images, arrows, and the relative po-
sitions for each. Each suggestion is also accompanied
by a description of the game state that explains, from
the perspective of a human user, why that particular
suggestion is important in the context of the game.
For example, the Teacher might show a text and im-
age to pick up a healthbox because the current user’s
life meter is low. A database of visual suggestions is
then recorded along with their game state description.
Then, at runtime, when the Teacher decides to send
a suggestion, the database is filtered and a subset of
compatible suggestions, CR, is kept for future eval-
uation. A similarity measure comparing the current
game state with the suggestions in the CR set (abso-
lute normalized difference between features such as
health status, relative distances to enemies, and up-
grade boxes) is used to decide which one to display.
The step of building the database of visuals and com-
patible game states is currently done manually to en-
sure the plausibility of the displayed suggestions, but
in the future we also consider automating this step.
In the rest of this section we describe in detail the
implementation of this system.
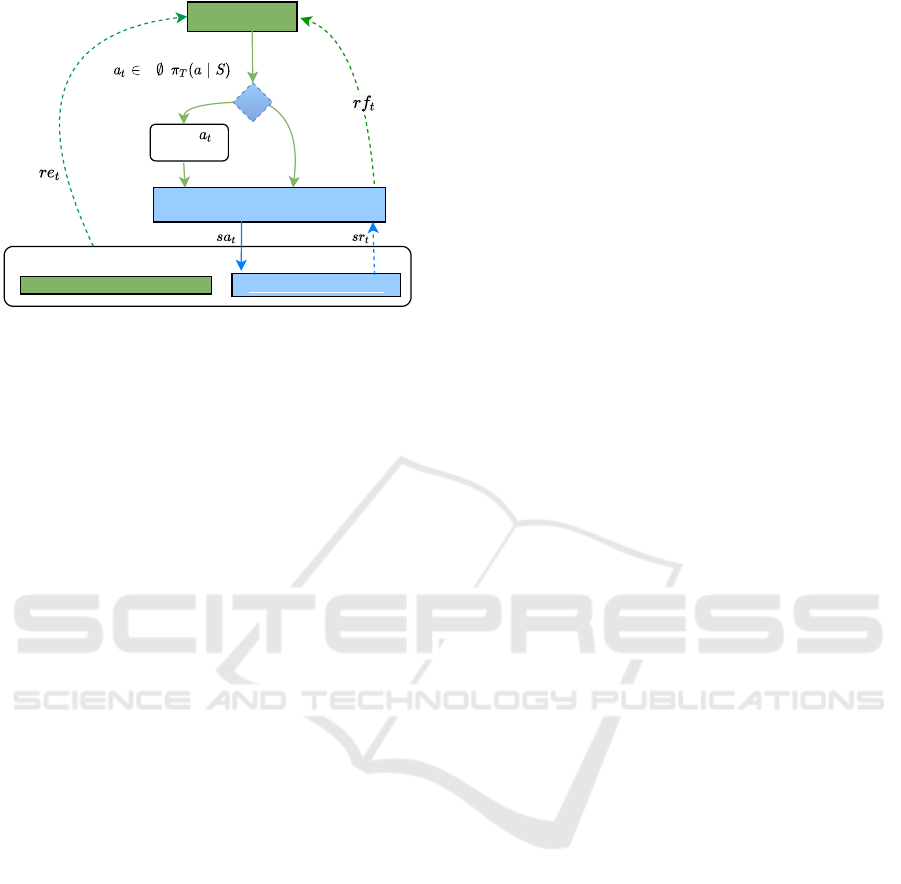
3.2 Environment Setup
The Extended Environment (ES) component is di-
vided into two subcomponents (Fig. 2):
Using Deep Reinforcement Learning to Build Intelligent Tutoring Systems
291
Extended Environment (ES)
Teacher agent
Student agent
(StudentRL, StudentHumanFeedback)
Send advice
{ , }
Action:
Reward from
environment (1)
Reward from feedback of
StudentHumanFeedback
agents. (2)
Student Environment (S)
Reward:
Teacher Observations (TO) => TS
Convert to
visuals
else
if StudentRL
Figure 2: The training process for obtaining Teacher’s sug-
gestion policy π
Advice
shown in Step 2 and 3 (Fig. 1) and
explained in Section 3.
• Student Environment (S). Represents the part of
the environment that the Student interacts with. In
the general use case, this is the end-user applica-
tion. State at time step t is denoted by S
t
.
• Teacher Observations (TO
t
). This is a backend
component in the application that is not visible to
the Student and collects observations about how
the Student behaves over time in the application.
In our case, since we are evaluating a game, we
are interested in observing concrete things such
as: did the player make progress in looking at
the map, did he manage to hide when necessary,
how many points did he score in a given situation.
For example, in a word processing application, the
system might monitor whether the user succeeds
in finding the fonts, styles, and other basic com-
ponents. We assume that at any given time, the
application can make an assessment of how well
the user is succeeding in understanding the appli-
cation based on these observations.
The Student interacts with its own part of the en-
vironment (the blue colored boxes and arrows in Fig.
2) at a time t by performing an action sa
t
and get-
ting back a reward sr
t
and a new state sa
t+1
. This
interaction is usually performed in every frame of the
application.
The Student can be one of three types:
• StudentRL: This agent is trained using the same
method as the Teacher, i.e. GAIL, and the same
rewards. The agent itself has a locally learned pol-
icy that is only available during the training ses-
sion with Teacher: π
St
(a|S). The action chosen at
each frame is then read from this policy.
• StudentHumanFeedback: this is a human who
takes the place of a Student and is able to give sen-
sitive feedback on the suggestions received (e.g.,
on topics such as how disruptive he/she is because
the Teacher makes too many suggestions, or fo-
cuses too much on the same category of actions
or behaviors, etc.). This can also be illustrated in
Fig. 2. Note that StudentRL cannot provide such
sensitive feedback.
• StudentHuman: this agent does not provide any
feedback or reward in training, and it is only used
for final evaluation of our methods (Fig. 3).
The Teacher interacts with the other part of the
environment (the green-colored boxes and arrows in
Fig. 2) by deciding whether or not to send sugges-
tions to Student at specified time steps. Note that
these time steps are different from those of Student,
since it has to analyze the situation over a longer pe-
riod of time before making a decision. From another
point of view, it does not make sense to send sugges-
tions too often, as this could become disruptive for the
Student. The Teacher’s proposal system state T S
t
at a
time step t is a concatenation of several features com-
posed of the constructions explained and motivated
below, as shown in Eq. 1. This is formed from the ob-
servations monitored by the Teacher (the T O
t
values)
and some other features:
T S
t
= (Embedding(S
t
), TO
t
, Budget
t
, HistShown
t
)
(1)
• Embedding(S
t
): the embedding of multiple
frames of the environment state where the Student
agent is acting on between time points [t − L +
1, t]. Details on how to obtain this are given in
Section 3.4.
• Budget: an array indexed by the type of actions
already proposed and how many of each were
shown. It is important to understand that hu-
mans have little attention and patience compared
to robots. With this in mind, our method tries to
limit showing frequent but imprecise suggestions
as much as possible, as opposed to showing fewer
but precise suggestions.
• HistShown: an array of size L containing how
many seconds ago the system showed the Student
the last L suggestions. This is important because
a human serving as Student can provide feedback
when the suggestions become disruptive. So the
purpose of this function is to automatically learn
the right times to show the suggestions.
The training process (detailed in 3.3) models a
policy that gives the probability of showing or not
showing a suggestion at a given time step, given the
state of the Teacher: π
Advice
(a
t
|T S
t
), where a
t
∈
ICSOFT 2022 - 17th International Conference on Software Technologies
292
{
/
0, π
T
(a|S)}. The suggestion given always corre-
sponds to the Teacher’s belief about the ideal action
to do in the given Student’s environment state (S), i.e.,
π
T
(a|S). There are two types of rewards observed by
the Teacher:
1. rewards that come from observing how the
Student agent behaves in the environment accord-
ing to the application’s metrics (included in TO
t
),
re
t
. This is useful for training the part of the net-
work that models the importance of the current en-
vironment state S and thus suggests actions when
needed.
2. rewards that come from the
StudentHumanFeedback agents, r f
t
, based
on sensitive feedback from human users. This is
in fact a kind of Active Learning for the Teacher
agent (Rubens et al., 2016).
To separate the application specifics from the al-
gorithm, we implemented several hooks in the pro-
posed framework that allow users to make their own
customizations for things like Teacher
′
s observations
TO
t
, environmental state S
t
, and rewards. In the case
of our evaluation application, and with the specific
example of observations T O
t
given at the beginning
of this section, a possible example set of concrete re-
wards (also used in our evaluation) for re
t
could be:
+1 for each new map area covered, +10 for each
enemy destroyed, +20 for each upgrade box used,
and +40 for each successful taking cover or running
against a stronger enemy. For r f
t
, possible values
could be −100 for each negative human feedback and
+50 for a positive feedback. Also, in our evaluation,
the MST constant was set to a maximum of 20 sug-
gestions per episode (this can be adjusted by the end
user; in our evaluation, we set this value so that the
learning process would be efficient; a longer setting
might result in too sparse rewards, as it would be dif-
ficult to learn from states and action pairs that lead to
significant rewards).
3.3 Teacher Recommendation Model’s
Architecture, Training and
Evaluation
The Teacher’s suggestion making policy π
Advice
uses
an Actor −Critic class architecture (Konda and Tsit-
siklis, 2000) in which the Actor decides the probabil-
ity of sending or not suggestions to the Student based
on its state T S
t
at the evaluated time t. The Critic then
decides how valuable the action chosen in the given
state is. If the value sampled from the policy π
Advice
is higher than a trainable parameter of the Bernoulli
distribution threshold T H, then the Teacher chooses a
suggestion, i.e., a sampled action from π
T
(a|S), based
on its best knowledge of what to do in the current
state of the Student’s environment. After a decision
is made whether not to send a suggestion (a
t
=
/
0) or
to send one (a
t
∼ π
T
), the progress of the Student’s
agent is observed by the application for a period of
time with respect to the desired metrics. Based on
these observations, the system can compute the re-
wards returned by the TeacherObservation compo-
nent of the ExtendedEnvironment. The intuition for
optimizing policy π
Advice
over time (according to the
policy gradient class of algorithms) is the following:
If the decision made (a
t
) in the given state (T S
t
) is
good, its probability is increased by backpropagation,
if not, it is decreased.
Since the environment outputs a continuous action
space, after several benchmark studies with different
algorithms, we concluded that the best results in our
case were obtained by using a particular type of actor-
critic algorithm: ’Twin Delayed Deep Deterministic’
(T D3) policy gradient (Fujimoto et al., 2018). The de-
cision was made after a comparison with other policy
gradient class algorithms such as TRPO (Schulman
et al., 2017a), PPO (Schulman et al., 2017b) and SAC
(Haarnoja et al., 2018), with a StudentRL instance on
the same benchmarks used in Section 4). Method-
ologically, the use of T D3 seems more appropriate in
our use case, as the Q − value could easily be over-
estimated with other methods, while the delay in pol-
icy updates helped our training in two ways: it made
the training process more stable by reducing the error
per update and improved the overall runtime perfor-
mance. For training, we use a mini-batch of N tran-
sitions, using the importance sampling strategy with
prioritized experience replay (Schaul et al., 2016).
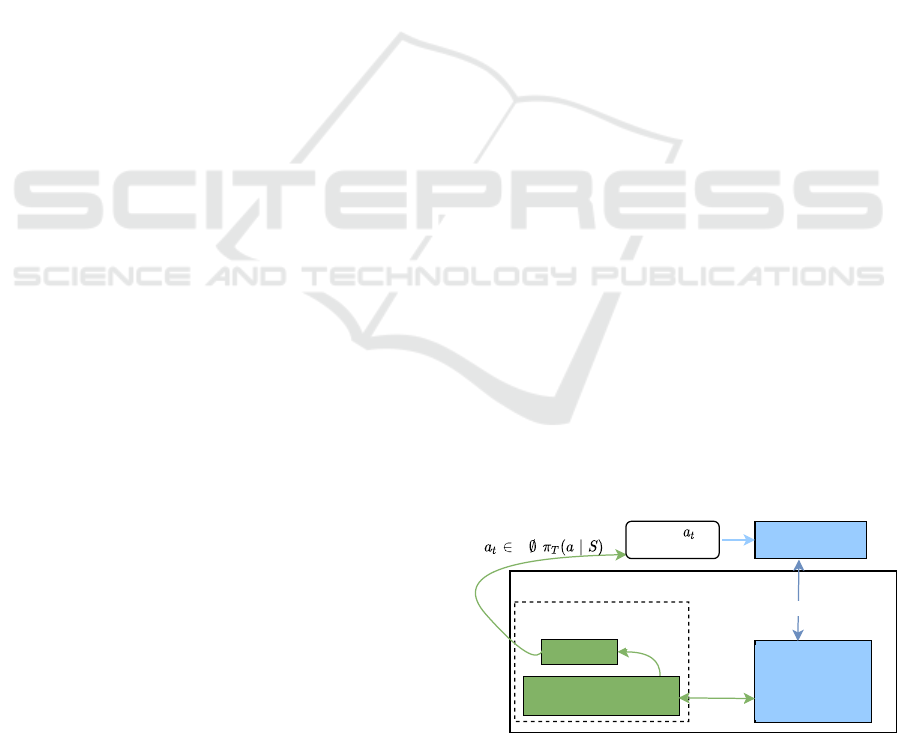
The architecture of the full Teacher model is
shown in Fig. 4. The runtime evaluation (inference)
process is shown in Fig. 3. The interested user can re-
fer to our supplementary material for the implementa-
tion details of the training and inference pseudocode.
Final Application = End-User Application interface + Tutorial Plugin
Tutorial Plugin
Student = End User
(StudentHumanEval)
Student
Environment (S) =
End-User
Application
Interface
Teacher Observations (TO)
=> TS
Teacher
Interact
Observe
Send TS
Send advice
{ , }
Convert to
visuals
Figure 3: The components used at runtime of the applica-
tion in evaluation mode, as described in section 3.3.
Using Deep Reinforcement Learning to Build Intelligent Tutoring Systems
293
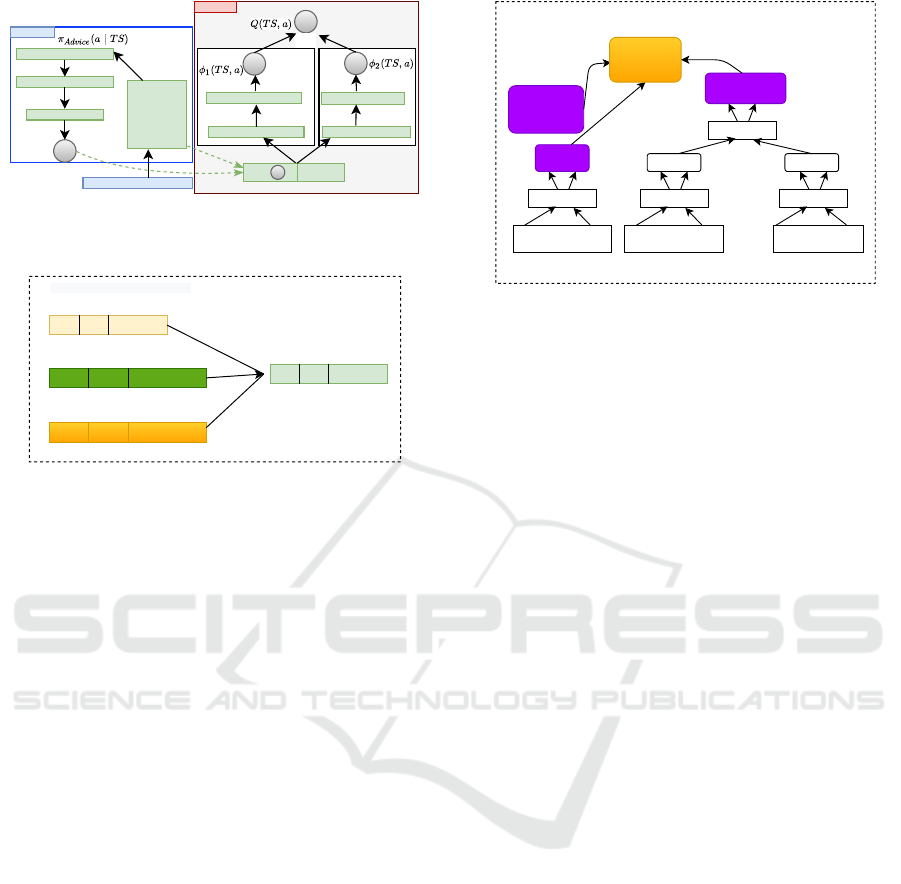
Teacher State (TS)
ETS =
Embedding
Network
(TS)
FC layer + RELU
FC layer + RELU
a
FC layer + RELU
FC layer + RELU
CRITIC
Sigmoid
FC layer + RELU
FC layer + RELU
min
ETSa
ACTOR
(concatenate)
Figure 4: The Actor-Critic class architecture used by our
framework using the TD3 algorithm, as detailed in Section
3.3.
c
...........
...........
TS.Budget
TS.HistShow
p items
L items
...........
TS.Embedding(S)
m items
...........
ETS
concat
size: p+L +m
ETS = Embedding Network (TS)
Figure 5: Showing how the Teacher’s state T S is used to
obtain the embedding ET S by simply concatenating its in-
put features.
3.4 States Embedding
The information obtained from the state of Teacher
(T S) could be used raw, as it is. But according to
the literature, in many situations it is better to have
a neural network structure that learns the structure of
the input data, converts it to a different dimensional
space, reduces its dimension or upscales it (Ren et al.,
2021), (Agarwal et al., 2021). This is the motivation
for the implementation of the state embedding, ET S
layer, which is included in the architecture of the Ac-
tor model in Fig. 4. Its value is obtained by concate-
nating several features from Eq. 1, as shown in Fig.
5. In our case, it plays an important role in both the
model architecture and the results.
The low-level embedding of the Student environ-
ment state S (Fig. 6) involves a concatenation of 3 dif-
ferent entities: (1) an embedding of the nearest static
objects around the user in the environment - this infor-
mation is mainly used for cover point detection (2) the
information from the last L frames about the user - po-
sitions, orientations and state (health, ammo, current
upgrades) (3) similar information as for the main user,
but for the user’s nearest K enemies on the map. Each
of these three embeddings use an internal architec-
ture with two fully connected layers. Of interest for
our particular use case is the attention layer (Vaswani
et al., 2017) used. The motivation of its use here is
to teach a model to weight the opponents in the game
differently depending on their information embedded
over a sequence of L frames analyzed.
TS.Embeeding(S)
Pos | Heading |
State
Pos | Heading |
State
(Enemy 1, last L
observations)
Enemy K, last
observations
.....
Emb1 EmbK
2 layers MLP
.....
.....
2 layers MLP
.....
.....
Pos | Heading |
State
Our user, last L
observations
User
Embedding
2 layers MLP
.....
.....
| | | | |
.....
.....
Enemies
Embedding
Attention layer
(K weights)
Environment
Objects
Embedding
Embedding(S)
(1)
(2)
(3)
concat
m items
Figure 6: The hierarchical embedding of state S architec-
ture. Note that this time, as detailed in the text, the embed-
ding has trainable parameters.
4 EVALUATION
The first part of this section presents the setup used for
training and evaluating the framework. It describes
the environment under test and the metrics used. The
second part analyzes the response to a few research
questions about the efficiency and feasibility of the
framework in practice. We adapt the Kirkpatrick’s
four levels for evaluating training (Newstrom, 2006)
by conducting feedback collection from the evaluated
users. This collection process is done: (a) automatic,
through metrics evaluation, and (b) manual, through
user interviews by text.
4.1 Application under Test
The function purpose of our methods was to be able
to specify the suggestions at a higher level of gran-
ularity so that they are understandable to a human
user, in both discrete and continuous action spaces,
and at different levels of granularity, e.g., move to
a specific location, take cover, shoot a specific unit,
take a resource box, etc. We built our system on a 3D
open-source game (Paduraru and Paduraru, 2019) us-
ing Unity Engine. The game has a customizable (NU)
number of AI agents (tanks) and humans fighting on
their own, with limited resources (life, health, ammo).
The agents can get powerups (shield, better weapons),
or replenish their resources. We used NU = 10 agents,
with each episode lasting until there is only one tank
left on the map, which generally takes ∼ 2 minutes.
The database of visual suggestions V S is com-
posed of 118 suggestions. The effort time needed to
represent it took around ∼ 58 hours. The manual pro-
cess involved mostly the creation of texts and the de-
cision of the relative positions and the orientations of
the visual artifacts relative to the units.
ICSOFT 2022 - 17th International Conference on Software Technologies
294

4.2 Qualitative Metrics Used
After observing the problems new users had in un-
derstanding our application, we selected some metrics
that could be automatically profiled and corrected us-
ing our tutoring system.
M1: What percentage of the map does a user manage
to iterate on average during 10 episodes? (controls
understanding).
M2: In a sequence of 100 episodes, how many times
has the user managed to upgrade their entity (a tank
game instance) by fetching crates from the map? (de-
tecting upgrade boxes).
M3: How much time (on average) did the user survive
in total during a sequence of 100 episodes? (ability to
defend).
M4: How many total enemies has the user eliminated
during a sequence of 100 episodes? (attack skill).
4.3 The Data Gathering and Training
Process
To obtain the policy used for evaluating the Student’s
environment state and making suggestions, π
T
(a
t
|S),
we used 4 selected people from an internal Quality
Assurance (QA) department of a game company who
knew the application very well. They recorded several
uses of the application in an interval of 5 days, each
with 8 hours of sessions. Their recordings were used
to train the policy as described in the previous section
with GAIL method (Ho and Ermon, 2016). The train-
ing last about 72 hours on a cluster of 4 Nvidia GTX
2080 Ti graphics cards.
Using the above trained policy as fixed and input
for the next step, the training of the advising policy,
π
Advice
(a
t
|T S) was done using two steps: Step (1):
The first policy version, π
Advice
v1
(a
t
|T S), is obtained
using a StudentRL by training for 120 hours , Step
(2): Starting with the π
Advice
v1
(a
t
|T S), we used our
internal Quality Assurance department with a differ-
ent set of 12 people, which did not use the application
before, to play 4 sessions each of 8 hours to fine-tune
the suggestions giving the final policy π
Advice
.
4.4 Research Questions Evaluation
Having the policies trained as described in Section
4.3, and a set of metrics defined in Section 4.2, we
are interested to evaluate three things:
R1: How well does Teacher help the users in under-
standing the application according to the goals set?
This also tests the adaptability of the suggestions de-
pending on the user’s needs.
R2: From the users’ perspective, how disruptive or
useless are the suggestions sent?
R3: How costly in terms of resources is to run the
advice system inside an application? Is it suitable for
real-time applications ?
To respond to these questions, we benefit from do-
ing playtests with 129 students in an academic part-
nership with University of Bucharest. We compared
five different methods of training users in our game
environment (note: all methods used the same visual
resources available for training individuals inside our
environment. We split the 129 students into 8 groups
randomly divided as equal as possible and given out
one the following methods:
Manual: A classic manual for the game, showing text
and images describing controls, mechanisms, sugges-
tions what to do in different situations. This is shown
before entering the game sessions, but also available
during play time.
Tutorial: A scripted tutorial before entering game
sessions to put the users in a few scenarios and show
them how to move through the map, attack, defend or
use the upgrade boxes. After this tutorial that lasts ∼
20 minutes, the player was let alone to play the game
sessions with no other help.
AHRec: Using the trained Teacher to give adaptive
suggestions using our proposed method.
PacMan: The method used by (Zhan et al., 2014).
PacHAT: The CHAT method from (Wang and Taylor,
2017) combined with (Zhan et al., 2014), according to
our idea described in Section 2 to adapt it in training
human users.
R1 Evaluation. For this evaluation, we profiled the
results of metrics M1-M4 (Section 4.2) for all users
within each of the groups. The results obtained were
averaged over ∼ 80 game sessions played in 4 hours,
with samples taken at each 30minutes (the X-axis of
the graphs below). Results are depicted in Fig. 7, 8, 9,
10 (Note that suffix fa stands for function approxima-
tion method, emb is for embedding method; AHRec
by default uses embedding).
It is worth noting that all three methods based
on AI techniques succeed in accelerating the training
progress of the Student compared to the two classical
methods. However, when using the proposed AHRec
framework, we notice an improvement in the profiled
metrics. We attribute these performance gains over
the other two methods mainly to the contributions that
we add and discuss in Section 1. Another thing to
note is that creating the embedding using Deep Learn-
ing techniques plays an important role in the qualita-
tive results for mapping the scene context via function
approximation methods. We would expect this to be
especially the case when mapping large environments
Using Deep Reinforcement Learning to Build Intelligent Tutoring Systems
295
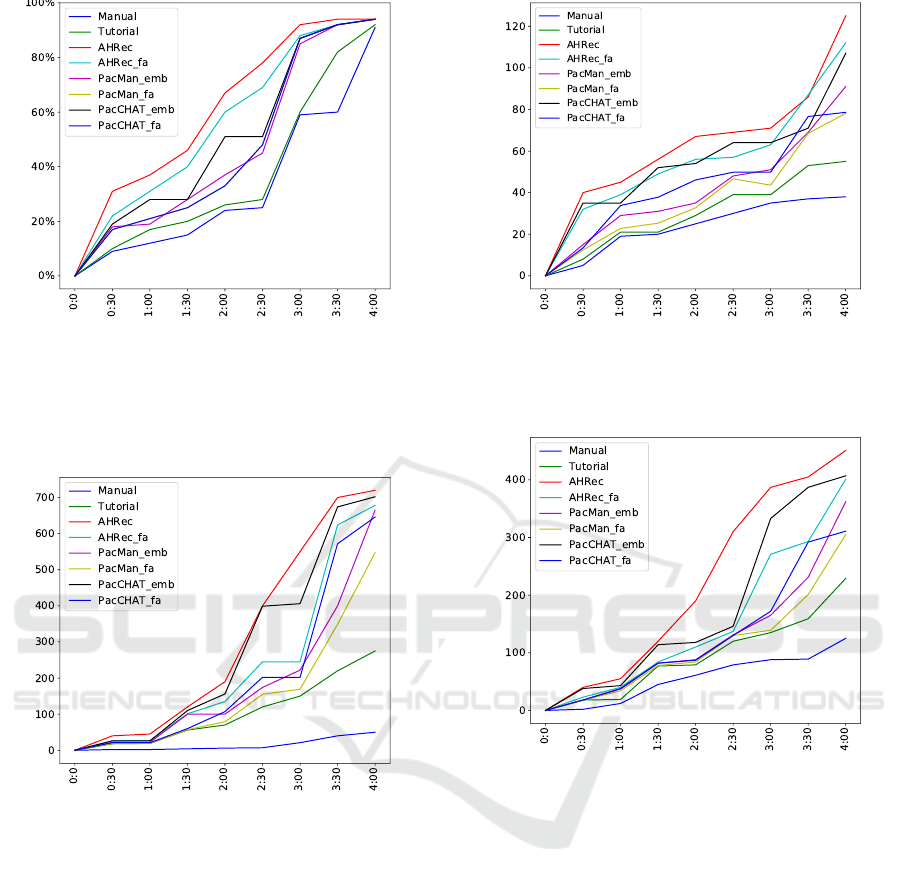
Figure 7: M1 evaluation. The Y-axis corresponds to the
percent of map covered. All methods converge to fully
coverage of the environment space (users understand the
controls), with an advantage for the AHRec method which
corrects the gaps in understand the controls in the game
quicker.
Figure 8: M2 evaluation. The Y-axis corresponds to the
average number of used upgrade boxes. By using AHRec,
the user learns quicker to use the upgrade boxes with the
visual aids suggested at runtime that shows the utility of
each in the right context (e.g. hint to take a health box when
user’s health is low).
such as the game in cause.
R2 Evaluation. In order to go more in depth in the
qualitative evaluation, we tried to assess the sensitive
feedback of the users when using the AHRec method.
We conducted the experiments again with two groups
of volunteers, each with 30 subjects, who received a
game instance using the AHRec method. However,
the first group used the intermediate π
Advice
v1
policy,
while the second group used the final π
Advice
policy.
The purpose of this split is to understand the impor-
tance of fine-tuning the final policy with human feed-
back (StudentHumanFeedback agent, Section 3.1).
There were two types of methods for collecting feed-
Figure 9: M3 evaluation. The Y-axis corresponds to the av-
erage number of avoiding being eliminated by an enemy.
AHRec users group learned quicker how to defend them-
selves against either humans or AI agents.
Figure 10: M4 evaluation. The Y-axis corresponds to the
average number of destroyed entities. AHRec users group
learned quicker how to attack and destroy other agents, ei-
ther humans or AI agents.
back for each individual:
Live Feedback. After receiving a suggestion, the user
had a non-intrusive UI component to evaluate the ad-
vice received as one of the tree options: (a) Useful,
(b) Too repetitive (e.g. user could receive suggestions
from same category suggestion too many times, but
this does not fit its style of play), (c) Too many in a
short interval of time.
Offline Feedback. After the 4 hours sessions each user
could write a detailed feedback on different topics: (a)
How do you rate the game in general? (b) What did
you like about the tutoring system? (c) How would
you compare it to Manual or Tutorial? (d) What
would you change to make it better?
The number of suggestions generated in the 4-
hour session depended heavily on observing the per-
formance of individual users, but on average there
ICSOFT 2022 - 17th International Conference on Software Technologies
296
were ∼ 59 (with a response rate of 71%) per user.
As an aside, there were 4 users out of 60 (3 in the first
group, 1 in the second) who completely disabled the
tutoring system because they found it too distracting.
The results shown in Table 1 indicate that the tutoring
system generally provides good and helpful feedback
on most aspects without being too disruptive when the
fine-tuned policy is used.
Table 1: Live feedback evaluation results averaged over the
number of responses received to each category during play
sessions, using both the intermediate and the fine-tuned pol-
icy.
Live feedback re-
sponse category
Percent of users
π
Advice
v1
π
Advice
Useful 38% 65%
Too many in a
short time
33% 13%
Too repetitive 19% 19%
Users disabling the
tutoring system
10% 3%
R3 Evaluation. For product-ready scenarios where
applications such as games need to run as fast as
possible and achieve high frame rates, it is impor-
tant to profile the time required to infer our pro-
posed model. Considering this, we profiled how
much time is required on average per frame to run
inference (CPU only, no GPU) on an Intel i5 9400
processor. The average evaluation per frame took
∼ 0.27 milliseconds(ms), with variations of ±0.12ms.
The memory footprint for the model was less than 24
MB. These results suggest that the methods described
in this paper may be suitable for lower specification
systems with limited resource budgets, without com-
promising the application frame rate.
5 CONCLUSIONS
In this paper, we presented a method to provide live
suggestions to the user while using an application.
These suggestions aimed to give the user a better un-
derstanding of the controls, interface, and dynamics,
and to show them how to use the application to their
advantage with less effort. Our method uses Rein-
forcement Learning techniques at its core. The eval-
uation conducted has shown that our tutoring system
is simultaneously efficient for human users, not per-
ceived as a nuisance, adapts to multimodal human be-
havior, and is fast enough to be deployed in real time
with limited resource budget. Our future plans are to
improve the method even further by automating the
manual work for the database of suggestions made.
One idea is to use some modern NLP techniques in
this area, since text generation is the most expensive
work for this step. Also, our method is currently being
used in other games that are planned to be released, so
we can further evaluate and improve our methods.
ACKNOWLEDGEMENTS
This research was supported by the European Re-
gional Development Fund, Competitiveness Oper-
ational Program 2014-2020 through project IDBC
(code SMIS 2014+: 121512).
REFERENCES
Agarwal, R., Machado, M. C., Castro, P. S., and Bellemare,
M. G. (2021). Contrastive behavioral similarity em-
beddings for generalization in reinforcement learning.
In International Conference on Learning Representa-
tions.
Alameda-Pineda, X., Ricci, E., and Sebe, N. (2018). Mul-
timodal Behavior Analysis in the Wild: Advances and
Challenges. Computer Vision and Pattern Recogni-
tion. Elsevier Science.
Ausin, M. S., Azizsoltani, H., Barnes, T., and Chi, M.
(2019). Leveraging deep reinforcement learning for
pedagogical policy induction in an intelligent tutoring
system. In EDM.
Beck, J., Woolf, B. P., and Beal, C. R. (2000). Advisor: A
machine learning architecture for intelligent tutor con-
struction. In Proceedings of the Seventeenth National
Conference on Artificial Intelligence and Twelfth Con-
ference on Innovative Applications of Artificial Intel-
ligence, page 552–557. AAAI Press.
Clouse, J. and Utgoff, P. (1996). On integrating apprentice
learning and reinforcement learning.
Fujimoto, S., van Hoof, H., and Meger, D. (2018). Ad-
dressing function approximation error in actor-critic
methods. CoRR, abs/1802.09477.
Haarnoja, T., Zhou, A., Abbeel, P., and Levine, S. (2018).
Soft actor-critic: Off-policy maximum entropy deep
reinforcement learning with a stochastic actor.
Ho, J. and Ermon, S. (2016). Generative adversarial imita-
tion learning. In Lee, D. D., Sugiyama, M., Luxburg,
U. V., Guyon, I., and Garnett, R., editors, Advances
in Neural Information Processing Systems 29, pages
4565–4573. Curran Associates, Inc.
Konda, V. R. and Tsitsiklis, J. N. (2000). Actor-critic algo-
rithms. In Solla, S. A., Leen, T. K., and M
¨
uller, K.,
editors, Advances in Neural Information Processing
Systems 12, pages 1008–1014. MIT Press.
Malpani, A., Ravindran, B., and Murthy, H. (2011). Person-
alized intelligent tutoring system using reinforcement
learning. In FLAIRS Conference.
Using Deep Reinforcement Learning to Build Intelligent Tutoring Systems
297

Martin, K. and Arroyo, I. (2004). Agentx: Using reinforce-
ment learning to improve the effectiveness of intelli-
gent tutoring systems. volume 3220, pages 564–572.
Newstrom, J. (2006). Evaluating training programs: The
four levels, by donald l. kirkpatrick. (1994). berrett-
koehler. 229 pp. 6:317 – 320.
Paduraru, C. and Paduraru, M. (2019). Automatic difficulty
management and testing in games using a framework
based on behavior trees and genetic algorithms.
Peltola, T., C¸ elikok, M. M., Daee, P., and Kaski, S. (2019).
Machine teaching of active sequential learners. In
NeurIPS.
Ren, J., Zeng, Y., Zhou, S., and Zhang, Y. (2021). An
experimental study on state representation extraction
for vision-based deep reinforcement learning. Applied
Sciences, 11(21).
Rubens, N., Elahi, M., Sugiyama, M., and Kaplan, D.
(2016). Active Learning in Recommender Systems,
pages 809–846.
Sarma, B. H. S. and Ravindran, B. (2007). Intelligent tu-
toring systems using reinforcement learning to teach
autistic students. In Home Informatics and Telemat-
ics: ICT for The Next Billion, pages 65–78, Boston,
MA. Springer US.
Schaul, T., Quan, J., Antonoglou, I., and Silver, D. (2016).
Prioritized experience replay. CoRR, abs/1511.05952.
Schulman, J., Levine, S., Moritz, P., Jordan, M. I., and
Abbeel, P. (2017a). Trust region policy optimization.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017b). Proximal policy optimization al-
gorithms.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L. u., and Polosukhin, I.
(2017). Attention is all you need. In Guyon, I.,
Luxburg, U. V., Bengio, S., Wallach, H., Fergus, R.,
Vishwanathan, S., and Garnett, R., editors, Advances
in Neural Information Processing Systems 30, pages
5998–6008. Curran Associates, Inc.
Wang, Z. and Taylor, M. E. (2017). Improving reinforce-
ment learning with confidence-based demonstrations.
In Proceedings of the Twenty-Sixth International Joint
Conference on Artificial Intelligence, IJCAI-17, pages
3027–3033.
Zhan, Y., Fachantidis, A., Vlahavas, I. P., and Taylor, M. E.
(2014). Agents teaching humans in reinforcement
learning tasks.
ICSOFT 2022 - 17th International Conference on Software Technologies
298
