
Working Efficiently with Large Geodata Files using Ad-hoc Queries
Pascal Bormann
1,2 a
, Michel Kr
¨
amer
1,2 b
and Hendrik M. W
¨
urz
1,2 c
1
Fraunhofer Institute for Computer Graphics Research IGD, 64283 Darmstadt, Germany
2
Technical University of Darmstadt, 64277 Darmstadt, Germany
Keywords:
Information Retrieval, Searching, Geospatial Data, Building Models, Point Clouds.
Abstract:
Working with large geospatial data such as building models or point clouds typically requires an index struc-
ture to enable fast queries. Creating such an index is a time-consuming process. Especially in single-user
explorative scenarios, as they are often found in the scientific community, creating an index or importing the
data into a database management system (DBMS) might be unnecessary. In this position paper, we show
through a series of experiments that modern commodity hardware is fast enough to perform many query types
ad-hoc on unindexed building model and point cloud data. We show how searching in unindexed data can be
sped up using simple techniques and trivial data layout adjustments. Our experiments show that ad-hoc queries
often can be answered in interactive or near-interactive time without an index, sometimes even outperforming
the DBMS. We believe our results provide valuable input and open up possibilities for future research.
1 INTRODUCTION
In recent years, the global amount of geospatial data
has grown due to an increased number of acquisition
devices and high-quality sensors (Yang et al., 2011).
At the same time, geospatial data is used in more and
more applications ranging from environmental mon-
itoring, infrastructure planning, catastrophe manage-
ment to health care.
Domain experts are increasingly faced with the
challenge that they receive new or updated large data
sets (sometimes on a daily basis) and need immedi-
ate access to them. The classic approach is to load
the data into a geospatial information system or a
database. These systems offer a wide range of func-
tionality and provide users with access to individual
items through acceleration structures such as inverted
indexes. Other tools reorder the raw data and optimize
it for certain use cases (Sch
¨
utz, 2016).
Nevertheless, in our practical work, we have ob-
served that the larger the data becomes, the harder it
is to create an acceleration structure for it, and thus,
the longer it takes until the data can be used. Import-
ing big data sets into a database or pre-processing it
sometimes takes several hours or even days. We have
a
https://orcid.org/0000-0001-6687-0082
b
https://orcid.org/0000-0003-2775-5844
c
https://orcid.org/0000-0002-4664-953X
further observed that, as a consequence, new or up-
dated data sets are often provided as raw files without
an acceleration structure on a remote server for down-
load. To immediately use such data in their applica-
tions (or simply to evaluate it before importing it into
a database), individual users could benefit from a sys-
tem that allows them to work directly (i.e. ad-hoc) on
the raw data.
In this position paper, we advocate for the usage
of ad-hoc queries based on raw, unindexed files, as a
means to make working with geospatial data in cer-
tain scenarios easier. It is our believe that creating an
index is not always the best course of action, a line of
thought that has been expressed by other researchers
as well, for example with the NoDB paradigm by
Alagiannis et al. (Alagiannis et al., 2012). Building
on this paradigm, we investigate the computational
power of modern commodity hardware, which should
be capable of handling many common query types in
interactive or near-interactive time even when there
is no index. To this end, we conduct various experi-
ments with different data sets and measure the perfor-
mance of practical ad-hoc queries. As the domain of
geospatial data is vast, we focus on two commonly-
used data types, namely city models and point clouds.
We compare the results with existing systems and an-
alyze the effects of trivial data layout changes on the
query performance. As it is clear that unindexed data
can never compete with indexed data in large-scale
438
Bormann, P., Krämer, M. and Würz, H.
Working Efficiently with Large Geodata Files using Ad-hoc Queries.
DOI: 10.5220/0011291200003269
In Proceedings of the 11th International Conference on Data Science, Technology and Applications (DATA 2022), pages 438-445
ISBN: 978-989-758-583-8; ISSN: 2184-285X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

multi-user scenarios, we instead address individual
users who download a new or updated data set from a
remote server to their local hard drive.
The results of our experiments indicate that mod-
ern commodity hardware is indeed fast enough to an-
swer various common queries on geospatial data in
interactive or near-interactive time. Taking into ac-
count the large preprocessing time for indexing, ad-
hoc queries are a viable and simple alternative.
2 RELATED WORK
The queries conducted within our experiments all
boil down to simple linear searches in the candidate
data. For city models, text-based data formats are of-
ten used, such as the CityGML (Gr
¨
oger et al., 2012)
data format, which is XML-based. Fast text search
is one of the oldest problems in computer science,
with popular algorithms such as Boyer-Moore (Boyer
and Moore, 1977), its improved version by Hor-
spool (Horspool, 1980), or Raita’s algorithm (Raita,
1992), which we use as the basis for our experiments
due to its simplicity and good performance for large
data sets. The core idea of all these algorithms is to
exploit knowledge about the sequence that is to be
searched to make larger jumps in the data.
Point clouds are often stored in binary formats
due to their large size (often billions of points),
which prevents the same optimizations that text-based
search algorithms employ. Instead of exploiting ex-
isting structures within point cloud file formats—as
we demonstrate later in this paper—the standard ap-
proach for querying point cloud data is to create an
index structure. This is often done by file group-
ing: points are grouped together by some primary
key, where points close to each other in the domain
of the key are put into the same file. This approach is
used by the Potree system (Sch
¨
utz, 2016) for spatial
queries, as well as for queries by object class as pro-
posed by El-Mahgary et al. (El-Mahgary et al., 2020).
One of the most common point cloud file formats is
the standardized LAS file format (American Society
for Photogrammetry and Remote Sensing (ASPRS),
2013), which has its own set of command-line tools
for data manipulation, called LAStools (Rapidlasso
GmbH, 2021; Isenburg et al., 2006). As LAS is a
fixed-width format (each point record has the same
byte size), it is a good candidate for writing highly
efficient search algorithms based on skipping over ir-
relevant parts of the point records.
Besides working with raw files, relational
database management systems (RDBMSs) have long
since been the de-facto standard for geospatial appli-
cations. The most noteworthy examples for RDBMSs
with spatial support are the PostGIS project (Post-
GIS Project, 2021), Oracle Spatial (Oracle, 2021)
and Microsoft SQL Server (Microsoft, 2021). 3DC-
ityDB (Yao et al., 2018) and GeoRocket (Kr
¨
amer,
2020) are open-source applications that manage 3D
building models. While 3DCityDB uses a relational
database as backend, GeoRocket is based on NoSQL
solutions. For point cloud data, there are special-
ized products such as the Point Cloud Server (Cura
et al., 2017) or the pgPointcloud extension for Post-
greSQL (Ramsey et al., 2021). For high-dimensional
point cloud data, the HistSFC (Liu et al., 2020) ap-
proach gives good results.
An alternative approach to querying geospa-
tial data is described by Sanjuan-Contreras et al.
who present a data structure called cBiK (Sanjuan-
Contreras et al., 2020). This data structure allows var-
ious spatial queries (e.g. k-nearest neighbor searches
or bounding box queries) to be performed on a com-
pressed data set stored in main memory. Their ap-
proach is based on the work by Navarro on compact
data structures (Navarro, 2016) and avoids I/O over-
head at the expense of more complex computions dur-
ing search. Although cBiK is very fast, the data struc-
ture has to be created upfront, so it is a spatial in-
dex. This is in contrast to our idea to perform ad-hoc
queries on disk (and not in memory) without creating
an index.
3 WORKING WITH UNINDEXED
GEODATA
Of the vast amount of geospatial data that is freely
available online, both building models and point
clouds are most often distributed as raw, unindexed
files through open data portals of individual land sur-
vey agencies and municipalities (DoITT, 2021, for
example) or through platforms such as OpenTopogra-
phy (OpenTopography Facility, 2022). Depending on
the use case, working with this data requires different
approaches, where an index is often the first thing that
is created. Index creation is highly domain-specific—
an index for a point cloud visualization is quite differ-
ent from one used for analyzing buildings—and of-
ten both time- and resource-intensive. Especially in
explorative scenarios, where neither the specific re-
gion of interest nor the relevant query parameters are
known upfront, index creation can be difficult or even
impossible (Holanda et al., 2020). Working with fre-
quently changing data also makes index creation dif-
ficult, as many of the index structures used for visual-
Working Efficiently with Large Geodata Files using Ad-hoc Queries
439
ization (e.g. kd-trees, octrees) do not lend themselves
well to frequent data updates.
In scenarios where users want to work quickly and
straightforwardly with the data, ad-hoc queries might
be the answer: queries issued on the raw data using
fast and memory-efficient search algorithms. The rea-
son for using sophisticated index structures is scala-
bility, but there are many single-user scenarios where
this does not play as big of a role. We therefore pro-
pose to instead focus on the common file formats of
building models and point clouds and exploit their in-
herent structure to speed up ad-hoc queries to get as
close to interactive speed as possible. Due to the large
volume of geospatial data, this only becomes viable if
we can identify and ignore as much data as possible
during these ad-hoc queries. For the CityGML for-
mat, we achieve this by searching for potential chunks
that might match the query parameters with a fast key-
word search and only perform XML-parsing on these
candidate chunks. For point cloud data, we can use
the bounding box information in the LAS headers to
quickly discard irrelevant files during spatial queries,
exploiting the fact that large point cloud data sets are
mostly already split up into many smaller files. In ad-
dition, we propose a data-transposed memory layout
for the LAS point records which groups all attributes
together in memory, making it easy to skip over large
portions of the data during querying.
3.1 Fast Search in Raw XML-based
Building Model Data
This section describes our approach to perform ad-
hoc queries on building data. We focus on CityGML,
which is a standardized XML-based file format com-
monly used to exchange 3D building models.
The classic way to work with XML is to parse the
file into memory and interpret the elements accord-
ing to the schema. This can be slow and memory-
intensive for data sets that are potentially several gi-
gabytes large. Instead, our approach is purely textual.
It is based on a fast string matching algorithm and a
simple but effective way to extract individual building
models from the CityGML data set.
The first step is to quickly search the data set
for a string of interest. For this, we implemented
Raita’s enhancement to the Boyer-Moore-Horspool
fast string searching algorithm (Raita, 1992) (see also
Section 2). The main idea is as follows: if you can
quickly identify a byte position p
i
of what you are
looking for in the data set, you can then create two
cursors c
1
and c
2
that search the file from p
i
back-
ward and forward to find the start and the end of the
XML element to extract respectively.
...
</bldg:Building>
</core:cityObjectMember>
<core:cityObjectMember>
<bldg:Building gml:id="gml_3KRIUGY6STPLF365ORLR3PIJGYUD5FM57NAB">
<gml:name>Bldg_12210009096</gml:name>
...
<gen:stringAttribute name="ownername">
<gen:value>Esrt Empire State Building, l.l.c.</gen:value>
</gen:stringAttribute>
<gen:stringAttribute name="lotarea">
<gen:value>91351</gen:value>
</gen:stringAttribute>
...
</bldg:Building>
</core:cityObjectMember>
<core:cityObjectMember>
<bldg:Building gml:id="gml_I0F7CFHURP1IVUBZ74UEN10YGMWKBB29M48P">
...
...
</bldg:Building>
</core:cityObjectMember>
<core:cityObjectMember>
<bldg:Building gml:id="gml_3KRIUGY6STPLF365ORLR3PIJGYUD5FM57NAB">
<gml:name>Bldg_12210009096</gml:name>
...
<gen:stringAttribute name="ownername">
<gen:value>Esrt Empire State Building, l.l.c.</gen:value>
</gen:stringAttribute>
<gen:stringAttribute name="lotarea">
<gen:value>91351</gen:value>
</gen:stringAttribute>
...
</bldg:Building>
</core:cityObjectMember>
<core:cityObjectMember>
<bldg:Building gml:id="gml_I0F7CFHURP1IVUBZ74UEN10YGMWKBB29M48P">
...
p
i
...
</bldg:Building>
</core:cityObjectMember>
<core:cityObjectMember>
<bldg:Building gml:id="gml_3KRIUGY6STPLF365ORLR3PIJGYUD5FM57NAB">
<gml:name>Bldg_12210009096</gml:name>
...
<gen:stringAttribute name="ownername">
<gen:value>Esrt Empire State Building, l.l.c.</gen:value>
</gen:stringAttribute>
<gen:stringAttribute name="lotarea">
<gen:value>91351</gen:value>
</gen:stringAttribute>
...
</bldg:Building>
</core:cityObjectMember>
<core:cityObjectMember>
<bldg:Building gml:id="gml_I0F7CFHURP1IVUBZ74UEN10YGMWKBB29M48P">
...
p
i
- n
...
</bldg:Building>
</core:cityObjectMember>
<core:cityObjectMember>
<bldg:Building gml:id="gml_3KRIUGY6STPLF365ORLR3PIJGYUD5FM57NAB">
<gml:name>Bldg_12210009096</gml:name>
...
<gen:stringAttribute name="ownername">
<gen:value>Esrt Empire State Building, l.l.c.</gen:value>
</gen:stringAttribute>
<gen:stringAttribute name="lotarea">
<gen:value>91351</gen:value>
</gen:stringAttribute>
...
</bldg:Building>
</core:cityObjectMember>
<core:cityObjectMember>
<bldg:Building gml:id="gml_I0F7CFHURP1IVUBZ74UEN10YGMWKBB29M48P">
...
p
i
+ m
c
1
c
2
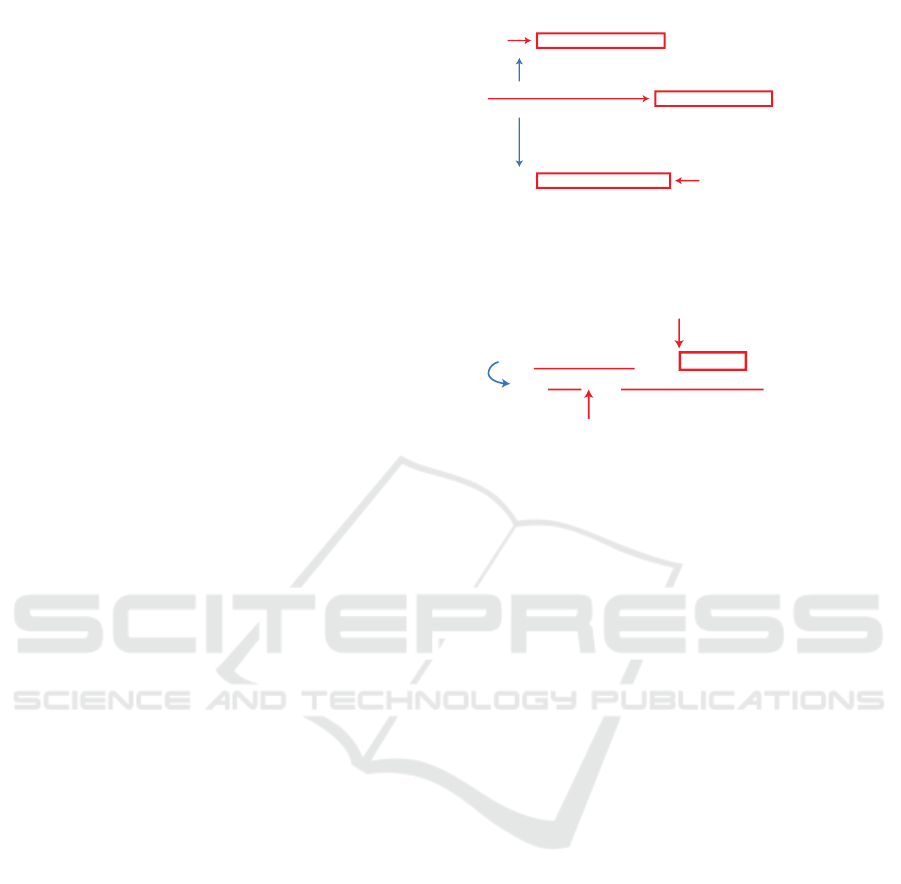
Figure 1: General approach to search in a text file and ex-
tract a CityGML building containing the match at position
p
i
and ranging from p
i
− n to p
i
+ m
...
<gen:stringAttribute name="ownername">
<gen:value>Esrt Empire State Building, l.l.c.</gen:value>
</gen:stringAttribute>
...
p
i
...
<gen:stringAttribute name="ownername">
<gen:value>Esrt Empire State Building, l.l.c.</gen:value>
</gen:stringAttribute>
...
...
<gen:stringAttribute name="ownername">
<gen:value>Esrt Empire State Building, l.l.c.</gen:value>
</gen:stringAttribute>
...
...
<gen:stringAttribute name="ownername">
<gen:value>Esrt Empire State Building, l.l.c.</gen:value>
</gen:stringAttribute>
...
p
i
+ v
Figure 2: Search for the attribute name, then skip forward
to compare the value.
Figure 1 depicts this procedure. p
i
points to the
matched string “Empire State Building”. Cursor c
1
searches the data set backward from p
i
− 1 to p
i
− n
until it finds the start of a building. In CityGML, this
is the “cityObjectMember” tag. Cursor c
2
searches
forward until the end of the building denoted by the
closing “cityObjectMember” tag. The string between
p
i
− n and p
i
+ m is then extracted.
Based on this, it is also possible to search for
buildings with certain attributes (e.g. addresses,
owner names, use classes). In CityGML, attributes
are described with the elements “stringAttribute”,
“intAttribute”, “doubleAttribute”, etc. The elements
have a “name” and a child element called “value”.
In order to find a building that matches a specific
attribute name-value combination, our approach first
searches the data set for the string representing the
name at position p
i
(see Figure 2). It then checks if the
match belongs to a generic attribute, moves forward to
find its value at a position p
i
+ v, and then compares
it with the search value. In case of a positive match,
the building is extracted as described above.
This idea even allows for more advanced queries.
As soon as the location p
i
+ v of the attribute value has
been identified, it can be parsed into memory. This
enables exact string comparisons as well as type con-
versions (string to number) and, hence, less than or
greater than comparisons. This is useful, for exam-
ple, to find all buildings that have more than n storeys
or those within a given zip code range.
With a little more effort, it also enables queries
for all buildings whose geometry relates to a cer-
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
440

<core:cityObjectMember>
<bldg:Building gml:id="gml_3KRIUGY6STPLF365ORLR3PIJGYUD5FM57NAB">
<gml:name>Bldg_12210009096</gml:name>
...
<bldg:boundedBy>
<bldg:GroundSurface gml:id="gml_52V6693CTPWOCJXNI9UOBIB6WVANHUN135AW">
...
<bldg:lod2MultiSurface>
<gml:MultiSurface srsName="EPSG:2263" srsDimension="3">
<gml:surfaceMember><gml:Polygon><gml:exterior><gml:LinearRing>
<gml:posList>
988042.890040159 212057.351853728 39.1315999999933
988086.798744991 212136.782797232 39.1315999999933
988105.85480924 212126.249025643 39.1315999999933
...
</gml:posList>
</gml:LinearRing></gml:exterior></gml:Polygon></gml:surfaceMember>
</gml:MultiSurface>
</bldg:lod2MultiSurface>
</bldg:GroundSurface>
</bldg:boundedBy>
...
</bldg:Building>
</core:cityObjectMember>
p
i
<core:cityObjectMember>
<bldg:Building gml:id="gml_3KRIUGY6STPLF365ORLR3PIJGYUD5FM57NAB">
<gml:name>Bldg_12210009096</gml:name>
...
<bldg:boundedBy>
<bldg:GroundSurface gml:id="gml_52V6693CTPWOCJXNI9UOBIB6WVANHUN135AW">
...
<bldg:lod2MultiSurface>
<gml:MultiSurface srsName="EPSG:2263" srsDimension="3">
<gml:surfaceMember><gml:Polygon><gml:exterior><gml:LinearRing>
<gml:posList>
988042.890040159 212057.351853728 39.1315999999933
988086.798744991 212136.782797232 39.1315999999933
988105.85480924 212126.249025643 39.1315999999933
...
</gml:posList>
</gml:LinearRing></gml:exterior></gml:Polygon></gml:surfaceMember>
</gml:MultiSurface>
</bldg:lod2MultiSurface>
</bldg:GroundSurface>
</bldg:boundedBy>
...
</bldg:Building>
</core:cityObjectMember>
Figure 3: Example of a “gml:posList” element from a ge-
ometry of a CityGML building.
tain bounding box. Figure 3 shows an example of a
CityGML building geometry. The x-y-z tuples can
be found in the “gml:posList” element. A geometry
typically has more than one of such elements. Our
approach here is to look for the string “gml:posList”,
extract the tuples one by one, convert their items to
floating point numbers, and then compare them with
the bounding box. This has to be repeated for all
“gml:posList” elements found inside the building. As
soon as a tuple falls within the bounding box, a match
has been found and the building can be extracted. All
remaining tuples and “gml:posList” elements of the
building can be skipped.
3.2 Fast Search in Binary Point Cloud
Data Formats
The main difference between point clouds and textual
data is the size of a single data entry. In our building
model experiments, a single building entry was on the
order of 20 KiB, whereas in common point cloud for-
mats, a single point is rarely larger than a few dozens
of bytes. Coupled with the significantly larger number
of point records in a typical point cloud (often rang-
ing into the billions), queries on point cloud data are
heavily bound by I/O (input/output) throughput.
The LAS file format stores point data in fixed-
sized records, which enables skipping over irrelevant
attributes during querying. We build on this observa-
tion with a custom variant of the LAS file format—
dubbed LAST—which transposes the memory layout
of the point records, storing all attributes together in
memory. Other file formats such as 3D Tiles (Cesium
Team, 2018) use a similar transposed memory layout.
A big hurdle for fast ad-hoc queries with point
cloud data is compression. The LAZ file format is
the compressed variant of LAS and is frequently used
due to its great compression ratio (Isenburg, 2013),
which comes at the cost of vastly increased compu-
tational overhead especially for decompression. We
thus investigate whether using a faster compression
algorithm such as LZ4 (LZ4 Team, 2021) can make
ad-hoc queries on compressed point cloud data fea-
sible. We test this with a second custom variant of
LAS, dubbed LAZER, which uses the same memory
layout as LAST but stored in blocks of a fixed number
of points where each block is compressed using LZ4,
using one compression context per attribute. Figure 4
shows the memory layout of these LAS variants.
4 EXPERIMENTS
To evaluate our approach, we conducted various ex-
periments on building model data and point clouds.
This section summarizes the results.
All experiments were performed on a standard
laptop, a 16” MacBook Pro 2019 with a 2.6 GHz
6-Core Intel Core i7 CPU, a 1 TB SSD hard disk, 32
GB of RAM, and macOS 11. We executed each ad-
hoc query five times, recorded the time taken each,
and then calculated the median. In order to get con-
sistent results, we also used the shell commands sync
and purge on macOS to flush the disk page cache
prior to every run. The runtimes of these commands
were not included in the measured time.
4.1 Building Model Experiments
For our approach to fast object search and extrac-
tion in XML-based building data, we performed
several example queries on the enhanced New
York CityGML 3D Building Model (version 20v5),
which is a combination of the NYC 3D Building
Model (DoITT, 2021) and the PLUTO data file (Pri-
mary Land Use Tax Lot Output) (Department of City
Planning (DCP) of the City of New York, 2021),
both provided free of charge by the City of New
York. The data set consists of 20 files, has a total
size of 20.91 GiB, and contains 1,083,437 buildings
with up to 90 semantic attributes per building. It
can be downloaded from GitHub (Fraunhofer IGD,
2021b). We used the raw, extracted files. No in-
dexing was applied. All experiments were run two
times to test different data sizes: once on a single
file (DA12_3D_Buildings_Merged.gml, 736.3 MiB,
24,038 buildings), and once on the whole data set.
Our small test application searches the single file
sequentially. For the whole data set, we implemented
multi-threading to process files in parallel (one thread
per file up to the number of available CPU cores).
Working Efficiently with Large Geodata Files using Ad-hoc Queries
441
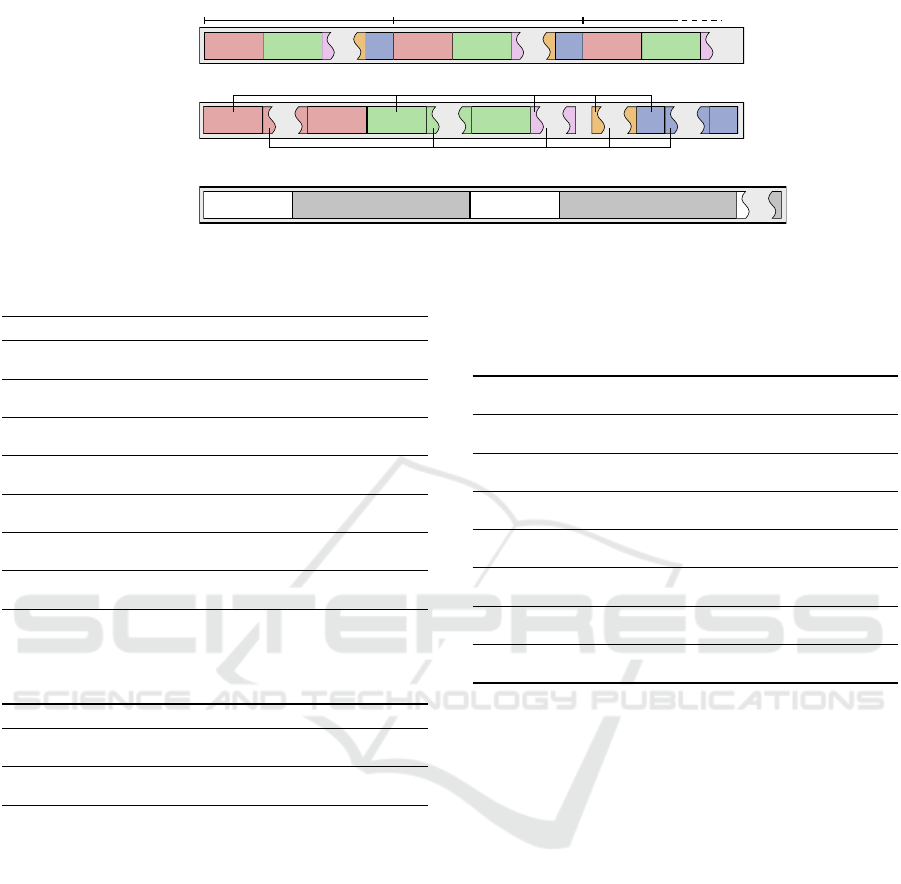
Intensity
Position
Block Header
LAST Block (LZ4 compressed)
Block Header
LAST Block (LZ4 compressed)
Position
Position
ID
...
...
...
...
...
...
...
...
Intensity
Intensity
Intensity
Position
ID
ID
ID
...
Point 1
Point 1
Point 2
Point 2
Point 3
Intensity
Position
...
LAS
LAST
LAZER
Figure 4: The memory layout of points in the LAS, LAST and LAZER file formats.
Table 1: Results of searching raw unindexed building data.
Query Files Runtime (s) Hits Misses Bldgs/s
“ownername” = “Empire
State Building”
Single 0.52 1 23,993 46,227
All 6.74 1 1,082,658 160,747
“zipcode” = “10019” Single 0.96 1,179 22,844 25,040
All 6.71 1,196 1,081,992 161,466
“numfloors” ≥ 4 Single 3.59 18,947 5,048 6,696
All 9.84 76,533 1,006,142 110,105
10018 ≤ “zipcode” ≤ 10020 Single 0.96 1,821 22,202 25,040
All 6.75 1,838 1,081,350 160,509
“bldgclass” starts with “F”
(Factory)
Single 0.49 69 23,927 49,057
All 6.65 4,167 1,078,514 162,923
bounding box ∩ (987700,
211100, 987900, 211300)
Single 1.96 13 609,408 12,264
All 12.89 13 12,965,283 84,053
bounding box ∩ (950000,
210000, 1000000, 220000)
Single 2.71 9,892 308,466 8,870
All 12.60 10,983 12,641,654 85,987
Table 2: Times it took to import the 3D building model into
3DCityDB and GeoRocket.
Files 3DCityDB GeoRocket
Import Single 2 m 25 s 1 m 51 s
All 2 h 37 m 29 s 1 h 07 m 06 s
Create additional indexes Single 12 s —
All 2 m 49 s —
Table 1 shows the results of our experiments. It
contains the example queries and the median run-
times it took to execute them on the single file and
on the whole data set. The table also shows the num-
ber of objects extracted (Hits), the number of fast text
search matches that did not lead to an extraction af-
ter attribute value comparison (Misses), as well as the
median throughput in buildings per second (Bldgs/s).
Bounding boxes are specified in the spatial reference
system NAD83 (EPSG code 2263), which uses me-
ters as unit.
To compare the performance of ad-hoc queries
with that of well-known existing database-driven so-
lutions, we imported the data into 3DCityDB 4.1.0
(Yao et al., 2018) and GeoRocket 1.3.0 (Kr
¨
amer,
2020). Table 2 shows the runtimes for importing as
well as the time for creating additional indexes (ap-
plies to 3DCityDB only; GeoRocket indexes in the
Table 3: Results of executing the example queries using
3DCityDB and GeoRocket. Runtimes of ad-hoc queries
have been copied from above for comparison. Fastest times
set in bold.
Query Data Runtime (s)
3DCityDB
Runtime (s)
GeoRocket
Runtime (s)
Ad-hoc
“ownername” = “Empire
State Building”
Single 0.92 0.02 0.52
All 0.98 0.02 6.74
“zipcode” = “10019” Single 2.42 0.75 0.96
All 2.52 0.79 6.71
“numfloors” ≥ 4 Single 15.31 11.53 3.59
All 97.53 47.00 9.84
10018 ≤ “zipcode” ≤ 10020 Single 3.19 1.16 0.96
All 15.74 1.21 6.75
“bldgclass” starts with “F”
(Factory)
Single 1.17 0.06 0.49
All 4.36 2.50 6.65
bounding box ∩ (987700,
211100, 987900, 211300)
Single 0.88 0.04 1.96
All 0.89 0.03 12.89
bounding box ∩ (950000,
210000, 1000000, 220000)
Single 9.28 6.42 2.71
All 11.46 6.99 12.60
background during import). Further, Table 3 shows
the runtimes of performing the example queries in
these two systems in comparison with ad-hoc queries.
In summary, the main observations from these ex-
periments are:
• The ad-hoc approach is fast enough to search the
whole 20.01 GiB large data set within only ∼ 6.75
seconds. Note that multi-threading only speeds
up I/O performance slightly but most importantly
allows the string searching algorithm to work in
parallel with reading new data.
• Queries that require string to number conversion
execute slower than simple comparisons. Finding
buildings with at least four storeys is the slowest
of those queries because it yields the most hits.
Extracting buildings therefore seems to be rather
time-consuming.
• The queries based on bounding boxes lead to
many misses because a huge number of x-y-z tu-
ples need to be parsed and compared. The per-
formance of these queries therefore highly de-
pends on the data and how many buildings actu-
ally match.
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
442

• Comparing to existing solutions, ad-hoc queries
perform very well. Of course, the database-driven
products are almost always faster, but, given they
require hours of importing and indexing in ad-
vance, the difference is not that much. In some
cases, ad-hoc queries are even faster. This is due
to the fact that we can burst copy extracted build-
ings instead of having to serialize and transfer
them over an HTTP or TCP/IP connection.
4.2 Point Cloud Experiments
For point clouds, we conducted three experiments
based on common query types:
• Querying points by bounding box (chosen to yield
approximately 1%, 25%, and 100% of the points)
• Querying points by bounding box and maximum
density (simulating level-of-detail)
• Querying points by a non-spatial attribute (object
class)
We used two different publicly available data sets
for these experiments:
• doc: The District of Columbia 2018 scan (22.2
GiB, 319 LAS files, 854 million points) (Wash-
ington, DC, 2018)
• ca13: A subset of the PG&E Diablo Canyon
Power Plant data set (12.7 GiB, 412 LAZ files, 2.6
billion points) (Watershed Sciences, Inc, 2013)
For these experiments, we converted both data
sets into all four file formats LAS, LAZ, LAST, and
LAZER, the latter two being the LAS variants de-
scribed in Section 3.2.
As a reference for our queries, we also loaded all
data sets into a PostGIS database with version 3.1.3
using the pgPointclouds extension with version 1.2.1.
Data upload was done using PDAL (PDAL Contrib-
utors, 2018) with the default configuration of group-
ing points into patches of size 400. Afterwards, we
manually created a spatial index on the patches. This
process took 1h 58m for the doc data set, and 7h 34m
for the ca13 data set.
The results of the three point cloud experiments
are depicted in Tables 4, 5, and 6 respectively. All
tables show the median runtime in seconds for each
query, as well as the median point throughput in mil-
lion points per second (Mpts/s), obtained as the num-
ber of points divided by the runtime of the query.
In summary, we can observe the following:
• Compressed file formats, even using the fast LZ4
compression algorithm, are an order of magnitude
slower than uncompressed files, and thus are al-
most exclusively unsuited for ad-hoc queries.
Table 4: Results of point cloud experiment 1.
Experiment 1 - Bounding Box query
Source
Runtime (s) Throughput (Mpts/s)
1% 25% 100% 1% 25% 100%
doc
LAS 0.39 2.69 9.87 2200.12 317.56 86.54
LAZ 1.77 18.14 53.47 482.49 47.08 15.97
LAST 0.37 2.85 8.36 2337.68 299.12 102.10
LAZER 0.81 11.45 37.68 1054.32 74.59 22.66
PostGIS
(patches)
0.09 5.91 21.50 9064.78 144.49 39.71
PostGIS
(points)
18.99 1023.41 3771.85 44.97 0.83 0.23
ca13
LAS 1.02 6.18 44.53 2552.66 421.99 58.57
LAZ 5.44 39.27 194.20 479.41 66.41 13.43
LAST 0.90 5.18 36.89 2884.43 503.77 70.70
LAZER 3.67 34.70 155.00 719.63 75.16 16.83
PostGIS
(patches)
1.07 14.90 132.05 2436.96 175.01 19.75
PostGIS
(points)
192.47 2662.58 13578.03 13.55 0.98 0.19
Table 5: Results of point cloud experiment 2.
Experiment 2 - Bounding box query with max. density
Source
Runtime (s) Throughput (Mpts/s)
1% 25% 100% 1% 25% 100%
doc
LAS 0.46 3.44 11.28 1854.01 248.31 75.68
LAZ 1.78 18.67 57.56 479.78 45.74 14.84
LAST 0.42 3.78 11.81 2053.87 225.93 72.32
LAZER 0.88 12.93 42.97 970.45 66.05 19.87
ca13
LAS 1.29 7.89 53.44 2025.09 330.51 48.80
LAZ 5.80 42.60 204.00 449.66 61.22 12.78
LAST 1.20 7.42 49.57 2179.32 351.44 52.62
LAZER 3.96 34.72 172.70 658.59 75.12 15.10
Table 6: Results of point cloud experiment 3.
Experiment 3 - Query by object class
Source
Runtime (s) Throughput (Mpts/s)
building non-existing building non-existing
doc
LAS 8.74 8.15 97.67 104.78
LAZ 62.74 59.39 13.61 14.38
LAST 3.73 0.83 229.06 1034.24
LAZER 23.66 21.35 36.09 40.00
PostGIS
(points)
165.68 5.62 5.15 151.83
ca13
LAS 44.31 42.60 58.86 61.23
LAZ 213.10 204.47 12.24 12.75
LAST 2.51 2.25 1040.18 1158.96
LAZER 104.76 104.41 24.89 24.98
PostGIS
(points)
114.78 110.41 22.72 23.62
• Transposing data, such as in the LAST format, can
speed up query performance significantly, allow-
ing up to a billion points per second to be queried
on consumer-grade hardware.
• Spatial queries in almost interactive time are of-
ten possible due to the presence of bounding box
information in the LAS headers of typical point
cloud data sets. Adding level-of-detail to the
queries has only a small performance overhead.
Working Efficiently with Large Geodata Files using Ad-hoc Queries
443

• PostGIS becomes slow once single-point granu-
larity (using PC Intersection) is desired. In al-
most all cases, working with unindexed files is
faster, and this is before including the substantial
time for importing the point cloud into PostGIS.
5 CONCLUSION
In this paper, we demonstrated how fast search al-
gorithms enable working with raw, unindexed geo-
data. We implemented several experimental applica-
tions that perform queries that are answered ad-hoc
based on raw geodata, without using any index struc-
ture. We released these applications under an open-
source license on GitHub (Fraunhofer IGD, 2021a).
The experiments show that for both building and point
cloud data, ad-hoc queries perform very well in gen-
eral. They achieve times reasonable for practical use
cases and comparable to those of the indexed-based
solutions. In particular, they allowed us to directly
work with the data without having to wait several
hours for it to be imported into a database. This even
works for data that does not fit into main memory.
For point cloud data, we also discovered potential
for optimization by changing the data layout within
the LAS file format so a search algorithm has to fetch
less data from disk. Compression is a limiting fac-
tor that makes querying raw point cloud data slow.
We were unable to achieve interactive query response
times for all tested compressed formats due to the
large computational overhead.
We believe that our results form the basis for de-
veloping further applications based on ad-hoc queries,
harnessing the power of modern computers. Espe-
cially in the scientific community, we often encounter
single-user scenarios where data is analyzed in a way
that is similar to what ad-hoc queries offer. Integrat-
ing fast search algorithms in the fashion of what is
presented in this paper into existing data analysis li-
braries could speed up these scenarios, enabling users
to work more efficiently with geospatial data.
REFERENCES
Alagiannis, I., Borovica, R., Branco, M., Idreos, S., and
Ailamaki, A. (2012). NoDB: Efficient query exe-
cution on raw data files. Proceedings of the ACM
SIGMOD International Conference on Management
of Data, pages 241–252.
American Society for Photogrammetry and Remote Sens-
ing (ASPRS) (2013). LAS specification, version
1.4 - R13. https://www.asprs.org/wp-content/uploads/
2010/12/LAS 1 4 r13.pdf. Accessed: 2022-04-06.
Boyer, R. S. and Moore, J. S. (1977). A fast string searching
algorithm. Communications of the ACM, 20(10):762–
772.
Cesium Team (2018). CesiumGS/3d-tiles: Specification
for streaming massive heterogeneous 3D geospatial
datasets. https://github.com/AnalyticalGraphicsInc/
3d-tiles. Accessed: 2022-04-06.
Cura, R., Perret, J., and Paparoditis, N. (2017). A scalable
and multi-purpose point cloud server (pcs) for easier
and faster point cloud data management and process-
ing. ISPRS Journal of Photogrammetry and Remote
Sensing, 127:39–56.
Department of City Planning (DCP) of the City of
New York (2021). Primary land use tax lot
output (pluto). https://www1.nyc.gov/site/planning/
data-maps/open-data/dwn-pluto-mappluto.page. Ac-
cessed: 2021-07-10.
DoITT (2021). Department of Information Technology
& Telecommunications (DoITT) of the City of New
York – NYC 3-D building model. https://www1.nyc.
gov/site/doitt/initiatives/3d-building.page. Accessed:
2021-07-01.
El-Mahgary, S., Virtanen, J. P., and Hyypp
¨
a, H. (2020). A
simple semantic-based data storage layout for query-
ing point clouds. ISPRS International Journal of Geo-
Information, 9(2).
Fraunhofer IGD (2021a). Ad-hoc queries on 3d
building models and point clouds - bench-
mark implementations. https://github.com/
igd-geo/adhoc-queries-building-models, https:
//github.com/igd-geo/adhoc-queries-pointclouds.
Accessed: 2022-04-06.
Fraunhofer IGD (2021b). Enhanced NYC 3-D building
model. version 20v5. https://github.com/georocket/
new-york-city-model-enhanced/. Accessed: 2022-
04-06.
Gr
¨
oger, G., Kolbe, T. H., Nagel, C., and H
¨
afele, K.-
H. (2012). OGC city geography markup language
(CityGML) encoding standard. Open Geospatial Con-
sortium, 2.0.0 edition.
Holanda, P., Raasveldt, M., Manegold, S., and M
¨
uhleisen,
H. (2020). Progressive indexes: Indexing for interac-
tive data analysis. Proceedings of the VLDB Endow-
ment, 12(13):2366–2378.
Horspool, R. N. (1980). Practical fast searching in strings.
Software: Practice and Experience, 10(6):501–506.
Isenburg, M. (2013). LASzip: Lossless compression of li-
dar data. Photogrammetric Engineering and Remote
Sensing, 79(2):209–217.
Isenburg, M., Liu, Y., Shewchuk, J., Snoeyink, J., and
Thirion, T. (2006). Generating raster dem from mass
points via TIN streaming. In Raubal, M., Miller, H. J.,
Frank, A. U., and Goodchild, M. F., editors, Interna-
tional conference on geographic information science,
pages 186–198. Springer.
Kr
¨
amer, M. (2020). Georocket: A scalable and cloud-based
data store for big geospatial files. SoftwareX, 11.
Liu, H., Van Oosterom, P., Meijers, M., and Verbree, E.
(2020). An optimized SFC approach for nd window
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
444

querying on point clouds. ISPRS Annals of the Pho-
togrammetry, Remote Sensing and Spatial Informa-
tion Sciences, 6(4/W1):119–128.
LZ4 Team (2021). Extremely fast compression algorithm.
https://github.com/lz4/lz4. Accessed: 2021-07-16.
Microsoft (2021). SQL Server. https://www.microsoft.com/
en-us/sql-server. Accessed: 2021-07-19.
Navarro, G. (2016). Compact Data Structures: A Practi-
cal Approach. Cambridge University Press, USA, 1st
edition.
OpenTopography Facility (2022). OpenTopography. https:
//opentopography.org/. Accessed: 2022-03-21.
Oracle (2021). Oracle’s spatial database. https://www.
oracle.com/database/spatial/. Accessed: 2021-07-19.
PDAL Contributors (2018). Pdal point data abstraction li-
brary. https://doi.org/10.5281/zenodo.2556738.
PostGIS Project (2021). PostGIS - Spatial and Geographic
objects for PostgreSQL. https://postgis.net/. Ac-
cessed: 2021-06-08.
Raita, T. (1992). Tuning the boyer-moore-horspool string
searching algorithm. Software: Practice and Experi-
ence, 22(10):879–884.
Ramsey, P., Blottiere, P., Br
´
edif, M., and Lemoine,
E. (2021). pgPointcloud - A PostgreSQL exten-
sion for storing point cloud (LIDAR) data. https:
//pgpointcloud.github.io/pointcloud/index.html. Ac-
cessed: 2021-07-19.
Rapidlasso GmbH (2021). LAStools: award-winning soft-
ware for rapid LiDAR processing. http://lastools.org/.
Accessed: 2021-06-08.
Sanjuan-Contreras, C. E., Retamal, G. G., Mart
´
ınez-Prieto,
M. A., and Seco, D. (2020). cBiK: A space-efficient
data structure for spatial keyword queries. IEEE Ac-
cess, 8:98827–98846.
Sch
¨
utz, M. (2016). Potree: Rendering Large Point Clouds
in Web Browsers. Master’s thesis, Institute of Com-
puter Graphics and Algorithms, Vienna University of
Technology, Favoritenstrasse 9-11/E193-02, A-1040
Vienna, Austria.
Washington, DC (2018). District of Columbia - Classi-
fied Point Cloud LiDAR. https://registry.opendata.
aws/dc-lidar/. Accessed: 2020-08-27.
Watershed Sciences, Inc (2013). PG&E Diablo Canyon
Power Plant (DCPP): San Simeon, CA Cen-
tral Coast. http://opentopo.sdsc.edu/lidarDataset?
opentopoID=OTLAS.032013.26910.2. Accessed:
2020-08-27.
Yang, C., Goodchild, M., Huang, Q., Nebert, D., Raskin,
R., Xu, Y., Bambacus, M., and Fay, D. (2011). Spa-
tial cloud computing: how can the geospatial sciences
use and help shape cloud computing? International
Journal of Digital Earth, 4(4):305–329.
Yao, Z., Nagel, C., Kunde, F., Hudra, G., Willkomm, P.,
Donaubauer, A., Adolphi, T., and Kolbe, T. H. (2018).
3dcitydb - a 3d geodatabase solution for the manage-
ment, analysis, and visualization of semantic 3d city
models based on citygml. Open Geospatial Data,
Software and Standards, 3(1):5.
Working Efficiently with Large Geodata Files using Ad-hoc Queries
445
