
Recommender System using Reinforcement Learning: A Survey
Mehrdad Rezaei and Nasseh Tabrizi
Department of Computer Science, East Carolina University, East 5
th
Street, Greenville, NC, U.S.A.
Keywords: Recommender Systems, Reinforcement Learning, Agent, Rewards.
Abstract: Recommender systems are rapidly becoming an integral part of our daily lives. They play a crucial role in
overcoming the overloading problem of information by suggesting and personalizing the recommended items.
Collaborative filtering, content-based filtering, and hybrid methods are examples of traditional recommender
systems which had been used for straightforward prediction problems. More complex problems can be solved
with new methods which are applied to recommender systems, such as reinforcement learning algorithms.
Markov decision process and reinforcement learning can take part in solving these problems. Recent
developments in applying reinforcement learning methods to recommender systems make it possible to use
them in order to solve problems with the massive environment and states. A review of the reinforcement
learning recommender system will follow the traditional and reinforcement learning-based methods
formulation, their evaluation, challenges, and recommended future work.
1 INTRODUCTION
The enormous amount of information existing on the
Internet causes the information overload problem,
making it hard to make the right decision. It can be
realized in our everyday online shopping when we
have an extended list of possible items to be
purchased. If the list grows longer, it will be harder to
select from the list. Recommender Systems (RSs) are
algorithms and software tools designed to assist users
in finding items of interest by anticipating their
preferences or ratings. The development of RSs helps
users find the item they are interested in by predicting
the rating on the items and their previous preferences.
Today, RSs are a crucial part of enormous companies
like Netflix, Amazon, Facebook, and Google where a
vast range of applications of RSs is employed, such
as e-learning (Aleksandra et al., 2015), e-commerce
(Ben et al., 1999), healthcare (Emre and Sevgi, 2013),
and news (Mozhgan et al., 2018). Different
techniques such as content-based filtering,
collaborative filtering, and hybrid methods are also
proposed to address the recommender system
problem. By the introduction of matrix factorization,
some success was achieved in the field of providing
appropriate recommendations. Still, the mentioned
methods have problems, i.e., cold start, scalability,
serendipity, proper computational expense, and
recommendation quality (Francesco et al. 2011).
Deep learning (DL) has recently gained approval in the
RSs application field because of the potential in
complex relationships of users, items, and their
accurate performance in the recommendation. Non-
interpretable, computationally expensive, and data-
hungry are properties of DL models (Shuai et al.,
2019). Above all, prior RSs methods are not beneficial
in the interaction between users and items, which can
be better handled with Reinforcement Learning (RL)
and its training agent in the environment that is a semi-
supervised machine learning field (Shuai et al., 2019).
The most critical point in the RL can be a combination
of traditional RL methods and DL together; this
combination is known as Deep Reinforcement
Learning (DRL). This allowed RL to be used in
problems with large state and action spaces, such as
robotics (Jens et al.,2013), industry automation
(Richard et al., 2017), self-driving cars (Ahmad et al.
2017; Changxi et al, 2019), finance (Zhengyao et al.
2017), healthcare (Arthur et al., 2008).
The RL is a seamless match for the recommenda-
tion problem because it has the ability to reward
learning without any training data, which is a unique
specification. These days, the power of RL is used to
recommend better items to the customers by many
companies, i.e., the video recommender system on
YouTube uses RL (Minmin et al., 2019). The use of
RL in the RSs is becoming more popular not only in
the industry but also in academia. The importance of
148
Rezaei, M. and Tabrizi, N.
Recommender System using Reinforcement Learning: A Survey.
DOI: 10.5220/0011300300003277
In Proceedings of the 3rd International Conference on Deep Learning Theory and Applications (DeLTA 2022), pages 148-159
ISBN: 978-989-758-584-5; ISSN: 2184-9277
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
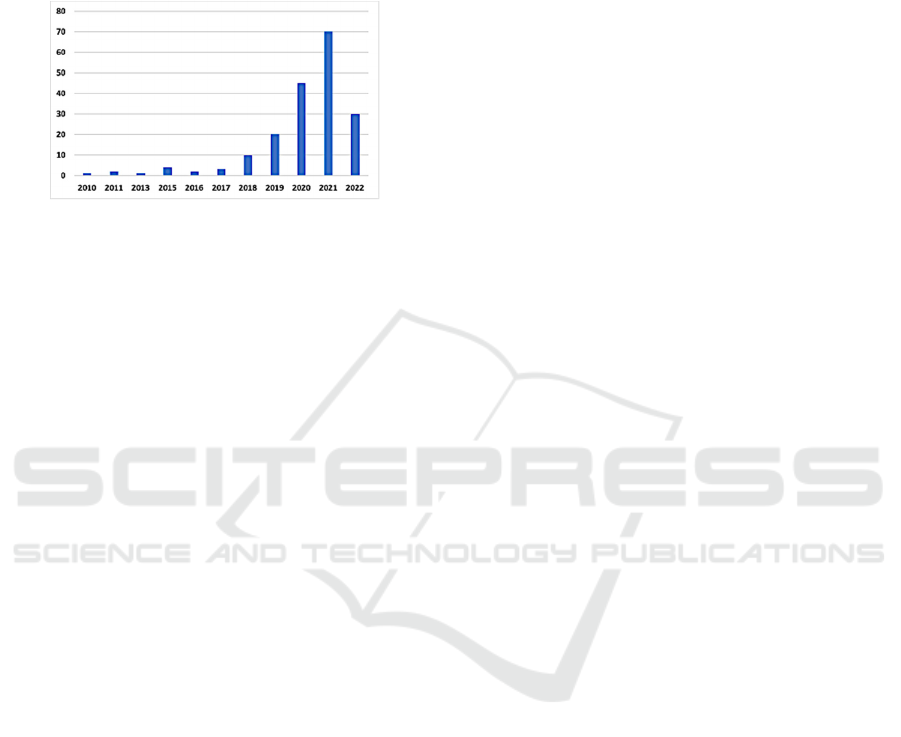
this topic motivated us to write this paper in the field
of reinforcement for RSs. Our paper's major goal is to
show the progress in utilizing RL in RSs to depict the
trend that has been changed during recent years. The
sample chart shown in Fig. 1 depicts the number of
papers published from 2010 through January 2022.
Figure 1: Number of papers published from 2010 to 2022.
2 METHODOLOGIES
We have decided to explore the problems and
challenges associated with the RSs with the RL
algorithm. As the second goal, methods, and
algorithms to tackle these challenges are discussed,
highlighting a critical point that involves the
introduction of the applications for RL-based and
non-RL-based RSs. This paper addresses the
followings:
• We first categorize the algorithms in the field
into RL- and DRL-based techniques. The
categories are then divided into specific RL
algorithms employed in the studies.
• To provide the reader with the essential idea and
contribution of the study, we first provide a
simple yet detailed description of each
algorithm.
• Future research directions are suggested.
Finally, in order to combine our survey study,
we give some insights about active research in
the Reinforcement Learning Recommender
System (RLRS) field.
We initially searched among all related articles
using multiple search engines with the following
search queries: recommender systems, recommender
engine, recommendation, content filtering,
collaborative filtering, reinforcement learning
algorithm, deep reinforcement learning algorithm,
and reinforcement learning for recommender systems
and applied them in different databases including
IEEE Xplore, SpringerLink, ScienceDirect, ACM
digital library, Lynda.com. We also explored popular
conferences in the field of RSs, such as RecSys,
SIGIR, and KDD. Following the article collection, we
reviewed the publications to find all related articles
for our purpose (Aleksandra et al., 2015; Smyth et al.,
2000). Therefore, the papers that use RL also for other
technologies other than RSs such as dialogue
management system/conversational were selected
(Satinder et al., 2000; Joel et al., 2006).
3 RECOMMENDER SYSTEMS
On daily basis, we encounter situations where
decisions need to be made and there is not enough
information on different aspects of them. In these
cases, it is necessary to trust others’ recommendations
who are experienced in those situations (Paul et al.,
1992). The early RSs were called collaborative
filtering (CF) (David et al., 1992). Then, it was
changed to RSs for two reasons: i) CF may not be
used by the users ii) item may be recommended not
filtered by the method. The recommender system may
use another approach termed Content-based Filtering
(CBF) that applies the user profile to suggest related
items associated with the user’s interest (Michael and
Daniel 2007; Pasquale et al., 2011). Both CF and CBF
cannot be used for some problems, where cold-start
and serendipity persist. To address the above issues,
the hybrid method was applied (Francesco et al.
2011). All the mentioned methods cannot handle
today’s RS problems due to a massive number of
users and items. We will introduce briefly classic
techniques used in RSs in this section and in the next
sections, we'll go through RL in further depth.
3.1 Collaborative Filtering
The aim of Collaborative Filtering (CF) RSs is to help
users to make a decision based on other users’
suggestions with similar interests (Deshpande and
Karypis, 2004). The CF approaches can be divided
into item-based and user-based (Sarwar et al., 2001),
wherein the user-based, the recommended items will
be suggested based on items that are liked by similar
users. In the item-based, items will be recommended
to users based on items in which they were interested.
Pearson correlation-based (Resnick et al. 1994),
Cosine-based, and Adjusted Cosine-based can be
used to calculate the similarity between users or
items. Users who rated both items will take part in the
calculation of the similarity of recommended items
which helps the calculation be more accurate. An
improved item-based CF was introduced by the
combination of the Adjusted Cosine and Jaccard
metric in order to increase the similarity calculation's
accuracy (Shambour and Lu, 2011).
Recommender System using Reinforcement Learning: A Survey
149
3.2 Content-based Filtering
Content-based (CB) RSs recommend items based on
similar items which have been liked by the user in the
past (Pazzani and Billsus, 2007). The fundamental
concepts of CB RSs are i) The specifications of items
are used to find the recommended items. In order to
detect these attributes, the items description which is
preferred by a certain user should be analyzed. ii) For
each item, specifications are compared with the
profile of the user. Eventually, items with a high
degree of similarity to the profile of the user will be
recommended (Pazzani and Billsus, 2007). Two
techniques are used to create recommendations in
CB. Methods with information retrieval, including
Cosine similarity measures, are used in the first
technique, which generates recommendations. The
second technique uses Machine Learning methods to
create recommendations.
3.3 Hybrid Recommendation Methods
To tackle the weaknesses regarding traditional RS
techniques and to achieve higher efficiency, a hybrid
RS technique is used, that merges two or more
recommendation techniques (Bruke, 2007). There are
seven initial combination approaches that are used to
create hybrid methods: Mixed (Smyth and Cotter,
2000), Weighted (Mobasher et al. 2004), Switching
(Billsus and Pazzani, 2000), Feature Combination,
and Argumentation (Wilson et al. 2003), Meta-level
(Pazzani, 1999), and Cascade (Bruke, 2002). The
most used hybrid RSs attempt to tackle cold start and
scalability issues (Bellogin et al., 2013).
4 REINFORCEMENT LEARNING
AND DEEP REINFORCEMENT
LEARNING
A machine learning method that studies different
problems and solutions to maximize a reward through
interaction between agents and their environment is
called RL. Three characteristics that discriminate an
RL problem (Richard et al., 2017) are: i) closed-loop
problem ii) there is no need for a trainer to teach the
learner, but it trains what to do to the learner with the
trial-and-error method according to the policy iii) the
short and long terms results can be influenced by the
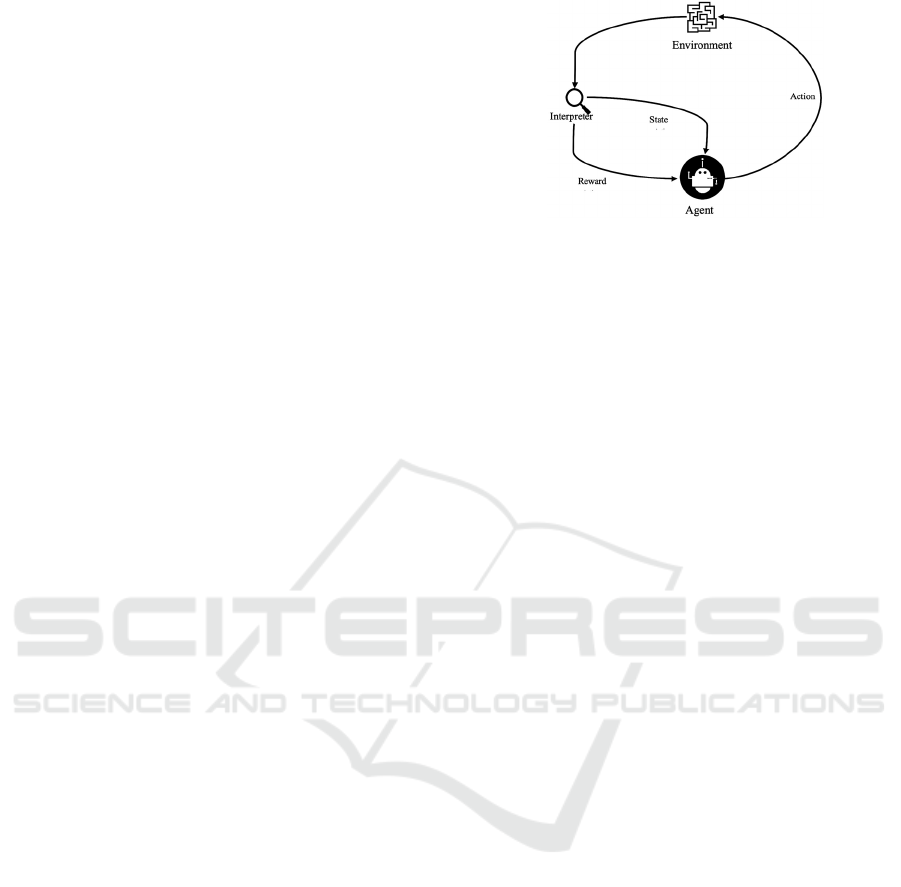
actions. The crucial part to model the RL problem is
the agent’s interface and environment as shown in
Fig. 2.
Figure 2: The interface of RL.
An agent is a decision-maker or learner; everything
outside of the agent is called the environment.
Information and representation that is seen outside of
the agent (the environment) at time step t is called
state, and the agent makes an action according to the
current state. Based on the action taken, the
environment is given a numerical reward and goes to
a new state. The RL problems are formulated
commonly as a Markov Decision Process (MDP) with
the form of (S, A, R, P, ), where S represents all
possible states, A indicates actions that are available
in all states, R presents reward function, P shows the
probability of the transition, and finally, is the
discount factor. The agent’s aim in the RL problem is
the best policy π(a|s) to make an action which is a
member of A in state s S to maximize the
cumulative reward. An RL system includes four
principal parts (Richard et al., 2017): i) Policy: It is
presented by π generally, which indicates the
probability of doing an action. The RL algorithm may
be categorized into on-policy and off-policy
techniques depending on the policy. In the first case,
RL approaches are used to evaluate or improve the
policy that is being used to make judgments. They
enhance or assess a policy that is not the same as the
one used to create the data in the latter. ii) Numeral
rewards: regarding the selected actions, the
environment gives a numeral reward in order to send
an announcement to the agent about the action that is
selected. iii) Value function: the purpose of the value
function is to indicate how good or bad is the action
in the long run. iv) Model: it indicates the conduct of
the environment. There are two types of algorithms
that are utilized to address RL challenges: tabular and
approximate. In the tabular method, tables are used to
represent value functions, and an accurate policy is
found because the size of spaces (action and state) is
not big. Monte Carlo (MC), Temporal Difference
(TD), and Dynamic Programming (DP) are popular
tabular methods. The MC methods need only an
instance of rewards, states, and actions that will be
provided by the environment. Monte Carlo Tree
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
150

Search (MCTS) is the most important algorithm of
MC methods. The DP methods use an excellent
model of the environment and value function in order
to find good policies. Policy and value iteration can
be good examples of DP methods. The TD method is
a blend of the MC sampling method and the DP
bootstrapping method. The TD methods, like the MC
methods, may learn from the agent's interactions with
the world and do not require model knowledge. From
this class, Q-learning (Christopher, 1989) and
SARSA are the most important ones as they are off-
policy and on-policy, respectively. In the
approximate method, the aim is to search for
sufficient solutions regarding the computational
resources constraint because state space has a massive
size. To address this, previous experiences are used.
Policy Gradient methods are very popular because of
their ability to learn policy parametrization and
actions selection without the need for a value
function. Actor-critic and reinforcement (Roland,
1992) are more significant methods in this category.
DL is a field based on an artificial Neural Network
that is used as the function in RL and suggests a deep
Q-network (DQN) (Alex et al. 2012; Ian et al. 2012).
DQN and Deterministic policy gradient (DPG)
(David et al. 2014) are combined and used in Deep
Deterministic Policy Gradient (DDPG) (Timothy et
al., 2015). In RSs, Double DQN (DDQN) and
Dueling Q-network are also used (Ziyu et al 2016).
5 REINFORCEMENT LEARNING
FOR RECOMMENDATION
The user's interaction with an RS is sequential in
nature. (Zimdars et al., 2001), and recommending the
best items to a user is a sequential decision problem
(Guy et al, 2005). This implies that the recommenda-
tion problem can be modeled as an MDP and solved
using RL approaches. As previously stated, an agent in
a normal RL situation seeks to maximize a numerical
reward through interaction with an environment. This
is similar to the recommendation problem, in which the
RS algorithm seeks to recommend the best goods to the
user while maximizing the user's pleasure. As a result,
the RS algorithm can act as the RL agent, and
everything outside of this agent, including system users
and items, can be regarded as the agent's environment.
Applying standard tabular RL algorithms to today's
RSs with large action and state spaces is nearly
impossible (Gabriel et al. 2015). Instead, with the
emergence of DRL algorithms, there is a growing trend
in the RS community to use RL approaches.
6 REINFORCEMENT LEARNING
ALGORITHMS
We present algorithms in a classified manner in this
part. After reviewing all the algorithms, we concluded
that the emergence of DRL has significantly altered
Figure 3: Number of publications using each algorithm.
the study of RLRSs. As a result, we split RLRS
approaches into two broad categories: RL- and DRL-
based algorithms. Fig. 3. gives a high-level overview
of the algorithms and number of publications. We
begin with RL-based approaches.
6.1 RL-based Methods
We mean RLRSs that use an RL algorithm for
recommendation policy optimization but do not use
DL to estimate parameters by RL-based methods.
RL-based methods include TD, DP, MC, and Fitted
Q RL algorithms from both tabular and approximate
approaches.
6.1.1 TD Methods
Q-learning is a well-known RL algorithm in the RS
field (Thorsten et al., 1997; Anongnrat and Pisit,
2005). WebWatcher is most likely the first RS
method to integrate RL to improve suggestion
quality. They simply treat the web page
recommendation problem as an RL problem and
apply Q-learning to increase the accuracy of their
basic web RS, which employs a similarity function
(based on TF-IDF) to propose pages that are related
to the user's interest. Authors in (Nima et al., 2007)
extend this idea a decade later to offer tailored
websites to users. To address the state dimensionality
issue, they employ the N-gram model from the online
usage mining literature (Bamshad et al., 2000) and a
sliding window to represent states.
Recommender System using Reinforcement Learning: A Survey
151

6.1.2 DP Methods
Another tubular approach that has been used in
(Thorsten and Anthony, 2001; Guy et al., 2005, Elad
et al., 2014) is DP. Ref. (Thorsten and Anthony,
2001) is one of the early studies that formulate the
recommendation problem as an MDP. In fact, the
paper examines the potential benefits of utilizing
MDP for the recommendation problem using the
example of guiding a user through an airport.
Similarly, ref. (Guy et al., 2005) is one of the early
and valuable attempts to model the recommendation
problem as an MDP. Because the model parameters
of an MDP-based recommender are unknown and
deploying it on the actual to learn them is
prohibitively expensive, they propose a predictive
model capable of providing starting parameters for
the MDP. This prediction model is a Markov chain in
which the state and transition function are modeled
based on the dataset observations. They suggest that
the simplest version of this Markov chain faces the
data sparsity problem because it uses maximum
probability to estimate the transition function. As a
result, the basic version is improved by utilizing three
techniques: skipping, clustering, and mixture
modeling. This prediction model is then utilized to
kickstart the MDP-based recommender. To address
the dimensionality issue, the last k elements are
employed to encode state information. They use an
online study to evaluate the effectiveness of their
strategy.
6.1.3 MC Methods
The final tabular approach, MC, has been used in
various RLRSs (Elad et al., 2014; Yu, 2020; Lixin et
al., 2019). To address the dimensionality issue, each
song is represented as a vector of song (spectral
auditory) descriptors, which include information
about the song's spectral fingerprint, rhythmic
features, overall loudness, and change over time. To
expedite the process of learning, the reward function
is also used to account for the listener's liking for
certain songs as well as his song transition behavior.
The DJ-MC architecture is made up of two primary
parts: learning listener parameters (his preferences for
songs and transitions) and arranging a song sequence.
6.1.4 Fitted Q Methods
Some RL-based algorithms (Yufan et al, 2011; Susan
et al., 2011; Georgios et al., 2015) also employ an
approximation technique (fitted Q) for policy
optimization. In a clinical application (Yufan et al,
2011), RL is used to offer treatment alternatives for
lung cancer patients with the goal of maximizing
patient survival. They regard treatment for patients
with advanced non-small cell lung cancer (NSCLC)
as a two-line treatment, with the role of the RL agent
being to recommend the best treatment option in each
treatment line as well as the appropriate time to begin
second-line therapy. Support vector regression (SVR)
is used to optimize the Q-function for the RL agent.
They alter SVR with a -insensitive loss function
because the original SVR cannot be used to censored
data (Vladimir, 2013). (Susan et al., 2011) employs
RL to identify the best therapy alternatives for
patients suffering from schizophrenia. First, they
employ multiple imputations (Roderick et al., 2019)
to solve the missing data issue, which can introduce
bias and increase variance in Q-value estimations due
to patient dropout or item missingness. The second
issue they address is that clinical data is highly
variable, with few trajectories, making function
approximation difficult. As a result, they train the Q-
function using fitted Q-iteration (FQI) (Damien et al,
2005) and a basic linear regression model. The
impetus for the work presented in (Georgios et al.,
2015) is that current ad suggestion algorithms do not
distinguish between a visit and a visitor and presume
that all visits to a website are from new visitors. As a
result, they claim that, while click-through rate (CTR)
is a realistic choice for greedy performance, life-time
value (LTV), denoted as (total number of clicks/total
number of visitors) ×100, is a true choice for long-
term performance. To address the off-policy
evaluation problem in the RS field, they employ a
model-free approach dubbed HCOPE, developed by
the same authors in (Philip et al., 2015), which
computes a lower bound on a policy's expected return
using a concentration inequality.
6.2 DRL-based Methods
In this part, we look at DRL-based RSs that employ
DL to approximate the value function or policy. For
policy optimization, these methods employ three
essential RL algorithms: Q-learning, actor-critic, and
REINFORCE. There are also other works that test
and compare the performance of various RL
algorithms for policy optimization.
6.2.1 Q-learning Methods
Slate-MDP (Peter, 2015) is possibly the first study to
use DQN for a slate recommendation. To deal with
the combinatorial action space caused by slates
(tuples) of actions, they present agents that use a
sequential greedy strategy to learn the value of whole
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
152

slates. In fact, it is anticipated that the item slates have
the sequential presentation attribute, which means
that recommended things are given to the user one at
a time. This assumption is paired with another, in
which it is assumed that one of the primitive acts will
be performed. They also employ an attention
mechanism based on DDPG for each slot in the slate
to direct the search to a tiny area of action space with
the highest value. However, as mentioned in (Eugene
et al., 2019), the second assumption is not very
realistic in frequent recommendation scenarios
because it is akin to the condition in which we can
force a user to eat a specific item.
DQN is used in (Shamim et al., 75) to optimize
heparin dosage advice. They first represent the
problem as a partially observable MDP (POMDP) and
then estimate the belief states using a discriminative
hidden Markov model. The policy is then optimized
using DQN. A variation of DQN is employed in
another clinical application (Aniruddh et al., 2017) to
optimize dosage recommendations for sepsis
treatment. They employ a continuous state space as
well as a discrete action space. They alter DQN as
follows due to intrinsic flaws in the original DQN
algorithm, including the overestimation of Q values.
The fundamental idea of (Xinshi et al., 2019) is to
utilize generative adversarial networks (GANs) to
develop a user model and then use a cascade DQN
algorithm to recommend the best things. A mini-max
optimization strategy is used in user modeling to
simultaneously learn user behavior and the reward
function. DQN is then used to learn the optimal
recommendation strategy using the learned user
model. Unlike other approaches, instead of tackling
the combinatorics of proposing a list of items (k
items) with a single Q-network, k Q-networks are
employed in a cascaded fashion to identify k best
actions. To be more specific, the ideal actions are
determined by the following fact:
:
∗
(
,
:
)
=
(
:
∗
(
,
:
)
)
6.2.2 Actor-Critique Methods
Wolpertinger (Nima et al., 2007) is an actor-critic
framework capable of dealing with huge action
spaces (up to one million). The goal is to create a
method that is sub-linear in terms of action space and
generalizable across activities. Wolpertinger is
divided into two components. The first is action
production, and the second is action refinement. In
the first half, the actor generates proto-actions in
continuous space, which are subsequently mapped to
discrete space using the k-nearest neighbor approach.
In the second section, outlier actions are filtered using
a critic, which chooses the best action with the highest
Q value. DDPG is also utilized to train their method.
Wolpertinger is not primarily intended for RSs,
although it can handle a recommendation task in a
simulation study.
DDPG is also used for parameter training. One
issue with this work is that it does not handle the
combinatorics of action space when generating a list
of items rather than proposing a single item. They
later propose page-wise advice in (Nima et al., 2007).
By recommending a group of complementary things
and displaying them on a website, they mean
recommending a set of complementary items and
displaying them on a page. The actor is in charge of
creating a page of stuff. To begin, two encoders are
utilized to produce initial and current states. The
actions are then generated by a decoder, namely a
deconvolutional neural network. On the other hand,
the current state (as determined by the same
approach) and action was taken by the actor are sent
into the critic, which employs a DQN architecture.
DDPG is employed for model training once more.
They also expand their work in e-commerce to a
whole-chain recommendation (Xiangyu et al., 2019).
Instead of having many scenarios in a user session,
such as a welcome page and item pages, they employ
a multiagent system with shared memory that
optimizes all these situations at the same time (in fact,
they only consider two pages in their studies: entry
and item pages). Agents (actors) interact with the user
sequentially and collaborate with one another to
optimize the cumulative reward. On the other side, it
is the global critic's responsibility to exert control
over these actors. The global critic employs an
attention method to capture user preferences in
various settings, and each attention is active only in
its specific scenario.
The recommender receives these states and uses a
basic closest neighbor algorithm to provide
recommendations. Finally, a historical critic is
employed in order to limit the number of infractions
to the user's preferences as specified in the user's
earlier comments. While the use of multimodal data
in this work is innovative, a thorough explanation of
the actor-critic paradigm is lacking.
6.2.3 REINFORCE Methods
Authors in (Claudio et al., 2017) create a
conversational RS based on hierarchical RL (Tejas, et
al., 2016). There is a module in the framework called
meta-controller that receives the dialogue state and
anticipates the goal for that state. The work supports
two types of goals: chitchat and recommendation.
Recommender System using Reinforcement Learning: A Survey
153

The dialogue state is converted to a score vector by a
goal-specific representation module, which is then
refined by an attention module to highlight more
relevant areas. Finally, a module known as the
controller employs these revised scores to take action
in order to meet the provided goal. In the framework,
there are two critics: an external critic reviews the
reward for the meta controller created by the
environment, and an internal critic rewards the
controller based on the aim set.
Ref. (Minmin et al., 2019) presents a useful study
in the field of video recommendation using RL. The
work's key contribution is the adaptation of the
REINFORCE method to a neural candidate generator
with a very wide action space. In an online RL scena-
rio, the policy gradient estimator can be written as:
∆
log
(
|
)
||
~
(1)
where R
t
is the total reward,
is called the
parametrized policy, and = (s
0
, a
0
, s
1
, …). Because,
unlike in conventional RL situations, online or real-
time interaction between the agent and environment
is infeasible and frequently only logged feedback is
provided, applying the policy gradient in Eq. (1) is
biased and requires rectification. The policy gradient
estimator that has been off-policy-corrected is then:
()
()
∆
log
(
|
)
||
~
(2)
where is the importance weight and
()
()
is the
behavior policy Because this adjustment yields a
large variance for the estimator, they utilize first-
order approximation, resulting in the biased estimator
with the reduced variance:
(
|
)
(
|
)
∆
log
(
|
)
||
~
(3)
The work's last contribution is top-K off-policy
rectification. Setting (top-K) recommendations result
in an exponentially increasing action space. The off-
policy adjusted estimator described in Eq. (3) is
modified to the following estimator for top-K
recommendation under two assumptions:
(
|
)
(
|
)
(
|
)
(
|
)
∆
log
(
|
)
||
~
(4)
where is the likelihood that an item appears in
the final non-repetitive set A (top-K items).
Finally, in (Huizhi, 2020), the environment is
represented as a heterogeneous information network
(graph) composed of persons, items, and other
information sources such as content, tags, reviews,
friends, and so on. The goal is to find a path in the
graph between a user and an unobserved item. As
shown below, the article employs a multi-iteration
training procedure. A meta-path base (similar to a
knowledge base) stores the meta-path computed at
each iteration. The meta-path base is initially empty
and is filled with meta-paths provided by experts. The
meta-paths tried by the RL agent in each iteration are
then added to the meta-path base. At the next
iteration, the revised meta-path base is used to train
the RL agent. This procedure is continued until no
new information can be gathered or the maximum
number of iterations is reached. The nearest neighbor
algorithm is utilized for the top-K recommendation.
6.2.4 Compound Methods
Authors in (Su et al., 2018) utilize RL to recommend
learning activities in a smart class, which is an
unusual but intriguing use. Specifically, a cyber-
physical-social system is constructed that monitors
students' learning state by gathering multi-modal data
such as test results, heartbeat, and facial expression,
and then offers a learning activity that is appropriate
for them.
Ref. (Floris et al., 2019) proposes and applies a
task-oriented dialogue management system to various
recommendation tasks. For dialogue management,
two approaches are proposed: segmentation-based
and state-based. The former separated the user
population depending on the context, such as
demographics and buying history, and each category
has its own policy. The latter strategy is based on the
concatenation of agent beliefs about past dialogues,
user intents, and context. This belief vector is then
loaded into a unique policy for all users. The work is
evaluated using a benchmark (Inigo et al., 2017) in
the field, which consists of a variety of
recommendation tasks, such as recommending
eateries in Cambridge or San Francisco.
7 ALGORITHMS OVERVIEW
7.1 RL-based Methods Recap
This section's RL approaches can be separated into
tabular and approximation methods. DP approaches
are typically impracticable among tabular methods
due to their high computing cost and the requirement
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
154

for a perfect understanding of the environment. While
the number of states in these algorithms is
polynomial, implementing even one iteration of
policy or value iteration methods is frequently
infeasible (Andrew, 1995). DP is only used by two
RS approaches in the RLRS literature (Guy et al.,
2005; Changxi et al., 2019). To make it more
practical, (Guy et al., 2005) employs a few features in
their state space and employs some approximations.
Similarly, (Tariq and Francesco, 2007) limits the
number of policy iterations that can be conducted.
Unlike DP, MC approaches do not require a perfect
understanding (or model) of the environment.
However, MC approaches have several
disadvantages, such as the fact that they do not
bootstrap. TD approaches, on the other hand, have
been quite popular in the RS community (Thorsten et
al., 1997; Anongnari and Pisit, 2005) The
fundamental reason for their appeal is their
simplicity; they are online, model-free, require little
processing, and can be stated using a single equation
(Richard and Andrew, 2017). In general, while
tabular approaches may find the exact answer, i.e., the
optimal value function and policy, they suffer from
the curse of dimensionality as the state and action
spaces grow, rendering them ineffective in learning.
RLRSs that use DP and TD approaches attempt to
address this issue by limiting the state space as small
as possible. Methods based on MCTS must likewise
preserve only the information from a sampling event,
not the entire environment.
On the other hand, aside from the SARSA ()
approach employed by (Mircea and Dan, 2005), the
sole sort of approximate method used by RL-based
RSs is the fitted Q method, which is a flexible
framework that can fit any approximation
architecture to the Q-function (Philip et al., 2015). As
a result, any batch-mode supervised regression
algorithm that can scale effectively to high
dimensional spaces can be utilized to approximate the
Q-function (Richard and Andrew, 2017). However,
when the number of four-tuples ((x
t
, u
t
, r
t
, x
t+1
), where
x
t
represents the system state at time t, u
t
the control
action taken, r
t
the immediate reward, and x
t+1
the
next state of the system) increases (Damien et al.,
2005), the computational and memory cost may grow.
Several RLRSs have used this algorithm (Yufan et al.,
2011; Susan et al., 2011; Georgios et al., 2015).
7.2 DRL-based Methods Recap
The establishment of DRL marked a watershed
moment in the history of RLRSs. This trend is clearly
depicted in Fig. 1. DRL's unique ability to handle
high-dimensional spaces makes it ideal for RSs with
huge state and action spaces. DQN has been the most
widely used DRL algorithm by RLRSs (Peter et al.,
2015; Shamim et al., 2016; Su et al., 2018; Floris et
al., 2019). DQN modified the original Q-learning
algorithm in three ways, according to (Richard and
Andrew, 2017): 1) It employs experience replay, a
mechanism first introduced in (Long-Ji, 1992) that
stores agents' experiences over various time steps in a
replay memory and uses them to adjust weights
throughout the training phase. 2) To simplify the
complexity of updating weights, the current updated
weights are fixed and fed into a second (duplicate)
network, the outputs of which are utilized as Q-
learning objectives. 3) To minimize the scale of error
derivatives, the reward function is trimmed to be 1 for
positive rewards, -1 for negative rewards, and 0 for
no rewards. All of these changes proved to increase
DQN's stability. However, as previously stated, DQN
has certain issues. first, following the Q-learning
method, DQN overestimates action values in some
cases, making learning inefficient and perhaps
leading to suboptimal policies (Sebastian and Anton,
1993). To address this issue, DDQN was proposed
and is used by numerous RLRSs (Aniruddh et al.,
2017). Second, DQN chooses events to replay at
random, regardless of their significance, making the
learning process slow and inefficient. Only four
RLRS algorithms use an upgraded version of DQN's
original experience replay mechanism, while the
majority of DQN-based RLRSs use the original
method. References (Aniruddh et al., 2017) employ
prioritized experience replay (Jiahuan et al., 2019),
ref. (Shi-Yong et al. 2018) uses stratified sampling
rather than uniform sampling, and ref. (Tong et al.,
2019) leverages cross-entropy of user interest to
prioritize experiences. Third, DQN cannot handle
continuous domains because it requires an iterative
optimization process at each step, which is
computationally prohibitively expensive. To address
this issue, DDPG, which combines DQN and DPG,
has been proposed.
Policy gradient methods, as opposed to action-
value methods such as DQN, learn a parameterized
policy without the use of a value function. When
compared to action-value techniques, policy-based
systems have three advantages (Richard and Andrew,
2017). 1) Policy approximate approaches can
approach determinism; 2) Policy approximation may
be simpler than value function approximation; and 3)
Policy approximation methods can find stochastic
optimal policies, whereas value-based methods
cannot. REINFORCE and actor-critic approaches are
two major policy gradient methods utilized by RSs.
Recommender System using Reinforcement Learning: A Survey
155

REINFORCE is a Monte Carlo (MC) stochastic
gradient approach that directly changes policy
weights. The high variance and delayed learning of
the REINFORCE algorithm is a key issue. These
issues stem from REINFORCE's MC nature, as it
takes samples at random. To address the high
variance problem in the REINFORCE-based RLRSs
reviewed, various techniques were used, including a
neural network-based baseline (Yikun et al., 2019),
first-order approximation (Satinder et al., 2000),
REINFORCE with baseline algorithm (Inigo et al.,
2017), weight capping. However, it is unclear how
other REINFORCE-based RLRSs, such as (Huizhi,
2020), deals with this issue. Instead of a baseline, the
actor-critic algorithm employs a critic to address the
difficulties of REINFORCE. To be more specific, the
critic is used to criticize the policy established by the
actor; that is, it computes the value of the state-action
pair provided by the actor and provides feedback on
how good the action chosen is. The policy gradient
approach now includes bootstrapping. While this
creates a tolerable bias, it minimizes variance and
speeds up learning (Richard and Andrew, 2017). As
previously stated, DDPG is a well-known DRL
technique that employs the actor-critic algorithm to
handle continuous spaces. It is worth noting that
among RLRSs, actor-critic is the second most
common RL algorithm (Nima et al., 2007).
8 DISCUSSION AND FURURE
WORKS
To begin, RL algorithms were designed to select one
action from a set of possible actions. However, in the
RS field, it is highly common to recommend a list of
products. This is also known as slate, top-K, or list-
wise recommendation. Except for a few (Georgios et
al., 2015; Peter et al., 2015; Wacharawan et al., 2018;
Eugene et al., 2019; Minmin et al., 2019), the vast
majority of the algorithms examined to consider the
problem of single item recommendation. Only
references (Minmin et al., 2019; Georgios et al.,
2015) properly study this topic and adapt their RL
technique to deal with a number of issues. The
problem of recommending a list of objects should be
investigated more in the future when the RL agent
confronts a wide combinatorial action space.
Nonetheless, there is no apparent justification for
employing a specific RL algorithm in an RS
application. As a result, finding a relationship
between the RL algorithm and the RS application is
an important research direction for the future.
Explainable recommendation refers to an RS's
capacity to not only make a recommendation but also
to explain why that recommendation was made
(Yongfeng and Xu, 2018). Explanation of
recommendations made may improve user
experience, increase trust in the system, and assist
users in making better selections (Dan et al., 2003; Li
and Pearl, 2005; Nava and Judith, 2007). Explainable
approaches can be classified into two categories:
model-intrinsic and model-agnostic (Zachary, 2018).
In the former, an explanation is offered as part of the
recommendation process, but in the latter, the
explanation is supplied after the suggestion has been
made. The method we discussed before (Yikun et al.,
2019) could be an inherent explanatory method. In
contrast, as a model-agnostic example (Xiting et al.,
2018), RL is used to explain various recommendation
approaches. The method employs a pair of agents,
one of which is in charge of generating explanations
and the other predicts whether the given explanation
is satisfactory to the user. Debugging the
unsuccessful RS (Xiting et al., 2018) is one intriguing
application of explainable suggestion. That is, with
the explanations supplied, we can follow the cause of
problems in our system and determine which sections
are malfunctioning. Only ref. (Yikun et al., 2019)
supports an explainable recommendation among the
RLRSs assessed in this survey, indicating that there is
a gap in this area and that further attention is needed
in the future. In conclusion, we feel that explainable
recommendations are essential in the future
generation of RSs, and that RL may be effectively
used to generate better explanations.
Finally, RLRS evaluation should be enhanced. To
learn what to do, an RL agent must directly interact
with the environment. This is analogous to an online
study for an RS; that is, the RS algorithm creates
recommendations and receives user responses in real-
time. Nonetheless, with the exception of a few
approaches discussed (Eugene et al., 2019; Minminet
al., 2019), the majority of the works use an offline
study for evaluation. This is especially because of the
high price of online research, as well as the high risk
of implementing an RLRS to optimize its
recommendation strategy for most organizations. As
a result, offline evaluation, utilizing accessible
datasets or simulation, is critical for RLRSs
evaluation.
The future research could focus on different areas.
For instance, dealing with one of the most significant
issues is keeping track of all users' global and local
states. Proposing and implementing RLRSs capable
of managing large state space is a research subject
that is rarely explored.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
156

9 CONCLUSIONS
We offered a complete and up-to-date survey of
RLRSs in this work. We emphasized the importance
of DRL in changing the research direction in the
RLRS field and, as a result, categorized the
algorithms into two broad categories: RL- and DRL-
based approaches. Following that, each broad group
was subdivided into sub-categories based on the RL
algorithm employed, such as Q-learning and actor-
critic. We feel that research on RLRSs is in its infancy
and that significant progress is needed. Both RL and
RSs are active research topics that are of particular
interest to large corporations and industries. As a
consequence, we may anticipate new and intriguing
models to emerge each year. Finally, we believe that
our survey will help researchers understand crucial
concepts and progress in the field in the future.
REFERENCES
Ahmad EL Sallab, Mohammed Abdou, Etienne Perot,
Senthil Yogamani (2017). Deep reinforcement learning
framework autonomous driving. Electronic Imaging,
2017(19):70-76.
Arthur Guez, Robert D Vincent, Massimo Avoli, Joelle
Pineau (2008). Adaptive treatment of epilepsy via batch-
mode reinforcement learning. In AAAI, pages 16711678.
Aleksandra Klasnja-Milicevic, Mirjana Ivanovic (2015),
Alexandros Nanopoulos. Recommender systems in e
learning environments: a survey of the state of the art and
possible extensions. Artficial Intelligence Review,
44(4):571-604.
Alex Krizhevsky, Ilya Sutskever, and Georey E Hinton
(2012). Image net classification with deep convolutional
neural networks. Neural information processing systems,
pages 1097-1105.
Andrew G Barto (1995). Reinforcement learning and
dynamic programming. In Analysis, Design and
Evaluation of Man Machine Systems, pages 407-412.
Elsevier.
Aniruddh Raghu, Matthieu Komorowski, Imran Ahmed, Leo
Celi, Peter Szolovits, and Marzyeh Ghassemi (2017).
Deep reinforcement learning for sepsis treatment. arXiv
preprint arXiv:1711.09602.
Anongnart Srivihok and Pisit Sukonmanee (2005). E-
commerce intelligent agent: personalization travel
support agent using q learning.7th international
conference on Electronic commerce, pages 287-292.
Bamshad Mobasher, Robert Cooley, and Jaideep
Srivastava(2000). Automatic personalization based on
web usage mining. ACM, 43(8):142-151.
Bellogin, I. Cantador, F. Diez, P. Castells, E. Chavarriaga
(2013), An empirical comparison of social, collaborative
filtering, and hybrid recommenders, ACM Transactions
on Intelligent Systems and Technology (TIST), 4 1-29.
Burke (2002), Hybrid recommender systems: survey and
experiments, User Model User-Adap Inter, 12 331-370.
Ben Schafer, Joseph Konstan, John Riedl (1999).
Recommender systems in e-commerce. ACM conference
on Electronic commerce, pages 158-166.
Billsus, M. Pazzani (2000), User modeling for adaptive news
access, User Model User-Adap Inter, 10 147-180.
Burke (2007), Hybrid web recommender systems, in: P.
Brusilovsky, A. Kobsa, W. Nejdl (Eds.) The Adaptive
Web, Springer-Verlag, Berlin Heidelberg, pp. 377-408.
Changxi You, Jianbo Lu, Dimitar Filev, Panagiotis Tsiotras
(2019). Advanced planning for autonomous vehicles
using reinforcement learning and deep inverse
reinforcement learning. Robotics and Autonomous
Systems, 114:118.
Christopher John Cornish Hella by Watkins(1989). Learning
from delayed rewards.
Claudio Greco, Alessandro Suglia, Pierpaolo Basile, and
Giovanni Semeraro (2017). Converseet-impera:
Exploiting deep learning and hierarchical reinforcement
learning for conversational recommender systems.
Italian Association for Artificial Intelligence, pages 372-
386. Springer.
Damien Ernst, Pierre Geurts, and Louis Wehenkel (2005).
Tree-based batch mode reinforcement learning. Journal
of Machine Learning Research, 6(Apr):503-56.
Dan Cosley, Shyong K Lam, Istvan Albert, Joseph A
Konstan,, John Riedl (2003). Is seeing believing how
recommender system interfaces a ect users' opinions.
conference on Human factors in computing systems,
pages 585-592.
David Goldberg, David Nichols,Douglas Terry, Brian M Oki
(1992).Using collaborative filtering toweave an
information tapestry. ACM, 35(12):61-70.
David Silver, Guy Lever, Nicolas Heess, Thomas Degris,
Daan Wierstra, and Martin Riedmiller (2014).
Deterministic policy gradient algorithms.
Deshpande, G. Karypis (2004), Item-based top-N
recommendation algorithms, ACM Transactions on
Information Systems (TOIS), 22 143-177.
Elad Liebman, Maytal Saar-Tsechansky, and Peter Stone
(2014). Dj-mc: A reinforcement earning agent for music
playlist recommendation. arXiv
Emre Sezgin, Sevgi Ozkan (2013). A systematic literature
review on health recommendersystems. E-Health and
Bioengineering Conference (EHB), pages 1-4. IEEE.
Eugene Ie, Vihan Jain, Jing Wang, Sanmit Narvekar, Ritesh
Agarwal, Rui Wu, Heng-Tze Cheng, Morgane Lustman,
Vince Gatto, Paul Covington (2019). Reinforcement
learning for slate-based recommender systems: A
tractable decomposition and practical methodology.
arXiv preprint arXiv:1905.12767.
Floris Den Hengst, Mark Hoogendoorn, Frank Van
Harmelen, and Joost Bosman (2019). Reinforcement
learning for personalized dialogue management.
International Conference on Web Intelligence.
Francesco Ricci, Lior Rokach, Bracha Shapira (2011).
Introduction to recommender systems handbook. In
Recommender systems handbook, pages 1-35.
Gabriel Dulac-Arnold, Richard Evans, Peter Sunehag, Hado
Recommender System using Reinforcement Learning: A Survey
157

van Hasselt, Timothy Lillicrap, Timothy Mann, Jonathan
Hunt, Theophane Weber, Ben Coppin,
Georgios Theocharous, Philip S Thomas, and Mohammad
Ghavamzadeh (2015). Personalized ad recommendation
systems for lifetime value optimization with guarantees.
In Twenty-Fourth International Joint Conference on
Artificial Intelligence.
Guy Shani, David Heckerman, Ronen I Brafman (2005). An
mdp based recommender system. Machine Learning
ResearchJournal , 6 (Sep) : 1265-1295.
Huizhi Liang. Drpro ling (2020): deep reinforcement user
pro ling for recommendations in heterogenous
information networks. IEEE on Knowledge and Data
Engineering.
Inigo Casanueva, Pawe l Budzianowski, Pei-Hao Su, Nikola
Mrk si c, Tsung-Hsien Wen, Stefan Ultes, Lina Rojas-
Barahona, Steve Young, and Milica Ga si c (2017). A
benchmarking environment for reinforcement learning
based task oriented dialogue management. arXiv preprint
arXiv:1711.11023.
Jens Kober, J Andrew Bagnell, Jan Peters (2013).
Reinforcement learning in robotics: A survey. Journal of
Robotics Research, 32(11) : 1238 - 1274.
Jianhua Han, Yong Yu, Feng Liu, Ruiming Tang, and
Yuzhou Zhang (2019). Optimizing ranking algorithm in
recommender system via deep reinforcement learning. In
2019 International Conference on Arti cial Intelligence
and Advanced Manufacturing (AIAM), pages 22-
26.IEEE.
Joel Tetreault and Diane Litman (2006). Using
reinforcementlearning to build a better model ofdialogue
state. European Chapter ofthe Association for
Computational Linguistics.
Li Chen, Pearl Pu (2005). Trust building in recommender
agents Workshop on Web Personalization,
Recommender Systems and Intelligent User Interfaces at
the 2nd International Conference on E-Business s, pages
135-145. Citeseer.
Lixin Zou, Long Xia, Zhuoye Ding, Dawei Yin, Jiaxing
Song, and Weidong Liu (2019). Reinforcement learning
to diversify top-n recommendation. International
Conference onDatabase Systems for Advanced
Applications, pages 104-120. Springer.
Michael J Pazzani and Daniel Billsus (2007). Content-based
recommendation systems. In The adaptive web, pages
325341. Springer.
Minmin Chen, Alex Beutel, Paul Covington, Sagar Jain,
Francois Belletti, Ed H Chi (2019). Top-k offpolicy
correction for a reinforce recommender system. ACM
International Conference on Web Search and
DataMining, pages 456464.
Mircea Preda and Dan Popescu (2005). Personalized web
recommendations: supporting epistemic information
about end-users. In The 2005 IEEE/WIC/ACM
International Conference on Web Intelligence (WI'05),
pages 692-695. IEEE.
Mobasher, X. Jin, Y. Zhou (2004), Semantically enhanced
collaborative filtering on the web, in: B. Berendt, A.
Hotho, D.Mladenic, M. Someren,ˇ M. Spiliopoulou, G.
Stumme (Eds.) From Web to Semantic Web, Springer,
pp. 57-76.
Mozhgan Karimi, Dietmar Jannach, Michael Jugovac(2018).
News recommender systems survey and roads ahead.
Information Processing and Management, 54(6):1203-
1227.
Nava Tintarev, Judith Mastho (2007): Exective
explanations of recommendations: usercentered
design.ACM conference on Recommender systems,
pages 153-156.
Nima Taghipour, Ahmad Kardan, Saeed Shiry Ghidary
(2007). Usage based web recommendations:a
reinforcement learning approach. ACM conference on
Recommender systems, pages 113-120.
Paul Resnick and Hal R Varian (1997). Recommender
systems. ACM, 40(3):56-58.
Pasquale Lops, Marco De Gemmis, Giovanni Semeraro
(2011). Content-based recommender systems: State of
the art and trends. In Recommender systems handbook,
pages 73-105. Springer.
Pazzani (1999), A framework for collaborative, content
based and demographic filtering, Artificial Intelligence
Review, 13 393-408.
Pazzani, D. Billsus (2007), Content-based recommendation
systems, in: P. Brusilovsky, A. Kobsa, W. Nejdl (Eds.)
The Adaptive Web, Springer Berlin Heidelberg, pp. 325-
341.
Peter Sunehag, Richard Evans, Gabriel Dulac-Arnold, Yori
Zwols, Daniel Visentin, and Ben Coppin (2015). Deep
reinforcement learning with attention for slate markov
decision processes with high dimensional states and
actions. arXiv preprint arXiv:1512.01124.
Philip S Thomas, Georgios Theocharous, and Mohammad
Ghavamzadeh (2015). High-con dence off-policy
evaluation. In Twenty-Ninth AAAI Conference on
Artficial Intelligence.
Resnick, N. Iacovou, M. Suchak, P. Bergstrom, J. Riedl
(1994). GroupLens : an open architecture
forcollaborative filtering of netnews, ACM Conference
on Computer Supported Cooperative Work, ACM,
Chapel Hill, North Carolina, USA, , pp. 175-186.
Richard S Sutton and Andrew G Barto (2017). Introduction
to reinforcement learning, volume 2. MIT press
Cambridge.
Richard Meyes, Hasan Tercan, Simon Roggendorf, Thomas
Thiele, Christian Buscher, Markus Obdenbusch,
Christian Brecher, Sabina Jeschke, and Tobias Meisen
(2017). Motionplanning for industrial robots using
reinforcement learning. Procedia CIRP, 63:107-112.
Ronald J Willams (1992). Simple statistical gradient
following algorihms for connectionist reinforcement
learning. Machine learning, 8(3-4):229-256
Roderick JA Little and Donald B Rubin (2019). Statistical
analysis with missing data, volume 793. John Wiley
Susan M Shortreed, Eric Laber, Daniel J Lizotte, T Scott
Stroup, Joelle Pineau, and Susan A Murphy (2011).
Informing sequential clinical decision making through
reinforcement learning:an empirical study. Machine
learning, 84(1-2):109-136.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
158

Satinder P Singh, Michael J Kearns, Diane J Litman, Marilyn
A Walker (2000). Reinforcement learning for spoken
dialogue systems. Neural Information Processing
Systems, pages 956-962.
Sarwar, G. Karypis, J. Konstan, J. Riedl (2001), Item-based
collaborative filtering recommendation algorithms, 10th
International Conference on World Wide Web, ACM,
pp. 285-295.
Sebastian Thrun and Anton Schwartz (1993). Issues in using
function approximation for reinforcementlearning.
Connectionist Models Summer School Hillsdale, NJ.
Lawrence Erlbaum.
Shambour, J. Lu (2011), A hybrid trust-enhanced
collaborative filtering recommendation approach for
personalized government-to-business eservices,
International Journal of Intelligent Systems, 26 814843.
Shamim Nemati, Mohammad M Ghassemi, and Gari D Cli
ord (2016). Optimal medication dosing fromsuboptimal
clinical examples:A deep reinforcementlearning
approach. Engineering in Medicine and Biology Society,
pages 2978-2981. IEEE.
Shi-Yong Chen, Yang Yu, Qing Da, Jun Tan, Hai-Kuan
Huang, and Hai-Hong Tang (2018). Stabilizing
reinforcement learning in dynamic environment with
application to online recommendation. In Proceedings of
the 24th ACM SIGKDD International Conference on
Knowledge Discovery & Data Mining.
Shuai Zhang, Lina Yao, Aixin Sun, Yi Tay (2019). Deep
learningbased recommender system :A survey and new
perspectives. Computing Surveys (CSUR), 52(1):1-38,
Smyth, P. Cotter (2000), A personalised TV listings service
for the digital TV age, Knowledge-Based Systems.
Su Liu, Ye Chen, Hui Huang, Liang Xiao, and Xiaojun Hei
(2018). Towards smart educational recommendations
with reinforcement learning in classroom. International
Conference on Teaching, Assessment, and Learning for
Engineering pages 1079-1084. IEEE.
Tariq Mahmood and Francesco Ricci (2007). Learning and
adaptivity in interactive recommender systems.
Conference on Electronic commerce, pages 75-84.
Thomas Degris (2015). Deep reinforcement learning in large
discrete action spaces. arXiv : 1512.07679.
Thorsten Bohnenberger and Anthony Jameson (2001). When
policies are better than plans: Decision theoretic planning
of recommendation sequences. International Conference
on intelligent user interfaces, pages 21-24.
Thorsten Joachims, Dayne Freitag, Tom Mitchell(1997).
Webwatcher: A tour guide for the world wide web. In
IJCAI (1), pages 770{777. Citeseer.
Timothy P Lillicrap, Alexander Pritzel, Jonathan J Hunt,
Nicolas Heess, Yuval Tassa, Tom Erez, David Silver,
Daan Wierstra (2015). Continuous control with deep
reinforcement learning. arXiv.
Tong Yu, Yilin Shen, Ruiyi Zhang, Xiangyu Zeng, and
Hongxia Jin (2019). Vision-language recommendation
via attribute augmented multimodal reinforcement
learning. ACM International Conference on Multimedia,
pages 39-47.
Vladimir Vapnik (2013). The nature of statistical learning
theory. Springer science & business media.
Wacharawan Intayoad, Chayapol Kamyod, and Punnarumol
Temdee (2018). Reinforcement learning for online
learning recommendation system. In 2018 Global
Wireless Summit (GWS), pages 167-170. IEEE.
Yufan Zhao, Donglin Zeng, Mark A Socinski, and Michael
R Kosorok (2011). Reinforcement learning strategies
forclinical trials in nonsmall cell lung cancer.
Nima Taghipour, Ahmad Kardan, Saeed Shiry Ghidary
(2007). Usage based web recommendations: a
reinforcement learning approach. In Proceedings of the
2007 ACM conferenceon Recommender systems.
Tejas D Kulkarni, Karthik Narasimhan, Ardavan Saeedi, and
Josh Tenenbaum (2016). Hierarchical deep
reinforcement learning: Integrating temporal abstraction
and intrinsic motivation. Neural information processing
systems, pages 3675-3683.
Long-Ji Lin (1992). Self-improving reactive agents based on
reinforcement learning, planning and teaching. Machine
learning, 8(3-4):293-321.
Yikun Xian, Zuohui Fu, S Muthukrishnan, Gerard De Melo,
Yongfeng Zhang (2019). Reinforcement knowledge
graph reasoning for explainable recommendation. ACM
SIGIR Conference on Research and Development in
Information Retrieval, pages 285-294.
Wilson, B. Smyth, D. O’Sullivan (2003), Sparsity reduction
in collaborative recommendation: A case-based
approach, Journal of Pattern Recognition andArtificial
Intelligence, 17863-884.
Xiangyu Zhao, Long Xia, Dawei Yin, and Jiliang Tang
(2019). Model-based reinforcement learning for whole-
chain recommendations. arXiv preprint
arXiv:1902.03987.
Xinshi Chen, Shuang Li, Hui Li, Shaohua Jiang, Yuan Qi,
and Le Song (2019). Generative adversarial user model
for reinforcement learning based recommendation
system. In International Conference on Machine
Learning, pages 1052{1061.
Xiting Wang, Yiru Chen, Jie Yang, Le Wu, Zhengtao Wu,
Xing Xie (2018). A reinforcement learning framework
for explainable recommendation. Conference on Data
Mining, pages 587-596. IEEE.
Yongfeng Zhang, Xu Chen (2018). Explainable
recommendation: A survey and new perspectives.
arXiv:1804.11192.
YuWang (2020). A hybrid recommendation for music based
on reinforcement learning. In Pacific-Asia Conference on
Knowledge Discovery and Data Mining, pages 91-103.
Springer,
Zachary C Lipton (2018). The mythos of model
interpretability. Queue, 16(3):31-57
Zhengyao Jiang, Dixing Xu, Jinjun Liang (2017). A deep
reinforcement learning framework for the nancial
portfolio management problem. arXiv.
Zimdars, D. M. Chickering, C. Meek (2001). Using temporal
data for making recommendations. In 17th Conference in
Uncertainty in Articial Intelligence.
Ziyu Wang, Tom Schaul, Matteo Hessel, Hado Hasselt, Marc
Lanctot, Nando Freitas (2016). Dueling network
architectures for deep reinforcement learning. In
International conference on machine learning.
Recommender System using Reinforcement Learning: A Survey
159
