
Behaviour Modelling of Computer-Generated-Forces in
Beyond-Visual-Range Air Combat
Fabian Reinisch
*
, Michael Strohal
†
and Peter Stütz
‡
Institute of Flight Systems, Universität der Bundeswehr Munich, Werner-Heisenberg-Weg 39, 85577 Neubiberg, Germany
Keywords: Computer Generated Forces, Behaviour Modelling, Beyond-Visual-Range, Air Combat, Pilot Training,
Behaviour Tree.
Abstract: Beyond-visual-range (BVR) engagements are getting more and more frequent in modern air combat. One of
the key challenges for pilots here is manoeuvre planning, which reflects their decision-making capacity and
can determinate success or failure. To ensure pilot training employing virtual BVR air combat simulations
yields success, high accuracy levels of the computer-generated forces (CGFs) are essential. To achieve this,
it is substantial to not only replicate and simulate the physical properties of the entities to a sufficient degree,
but also to provide them with a close-to-human-like behaviour. In this paper, we propose a general concept
to tackle these challenges: First, we introduce flight motion dynamic models (aircraft, missiles, chaff) as well
as a jammer. Then, we analyse the workflow of a typical beyond-visual-range air combat engagement,
separating it into attack, self-defence and decide. Within this context, we introduce Behaviour Trees as a
method to model these tasks and explain its benefits. Further plans include the verification and validation of
the CGF behaviour within future experimental campaigns that consist of human-controlled opponent aircrafts
(pilots) flying against the CGFs. Finally, we provide an outlook to future work in where we intent to employ
reinforcement learning for tasks containing many degrees of freedom.
1 INTRODUCTION
In recent developments, beyond-visual-range (BVR)
air combat has become the most frequent type of air
combat engagement. In order to be able to prepare for
these situations, pilots need to have sufficient
knowledge and training to react appropriate to the
actions and manoeuvres of the adversary. Since this
training process is very costly and time-consuming
(preparation of aircrafts, maintenance), using training
simulations greatly helps overcoming these
limitations. However, in order to maximize the
benefit for pilots, simulating a detailed physical
representation as well as human-like (which includes
imperfect/faulty) behaviour of the adversary side is an
indispensable prerequisite. Since these CGFs need to
be able to handle different air combat situations,
designing this type of behaviour is a problem
incorporating many degrees of freedom.
*
https://www.unibw.de/lft/personen/fabian-reinisch-m-sc
†
https://www.unibw.de/lft/personen/dr-ing-akdir-michael-strohal
‡
https://www.unibw.de/lft/personen/univ-prof-dr-ing-peter-stuetz
Often, Off-The-Shelf products such as STAGE
(Presagis, 2016) or VBS (Bohemia Interactive) are
prominently used to model behaviour in military
simulations. While these can support AI to some
degree, (Toubman et al., 2016 - 2016) concluded that
these products don't have the ability to model
behaviour through adaptive processes and many even
still rely on forms of scripting. Aggravating, they
outlined a lack of AI methods in these Off-The-Shelf
packages, which would be beneficial to explore new
air combat strategies and model CGF behaviour.
Today, existing papers mostly focus on dogfights
while BVR air combat research is still uncommon.
Additionally, most of the rare papers that do research
BVR air combat only focus on a very small subset of
the whole air combat workflow such as target
detection and tracking (V. Chandrakanth et al., 2022)
or engagement support (Joao P. A. Dantas et al.,
2021), however research incorporating the entire
BVR air combat workflow is still a mostly
Reinisch, F., Strohal, M. and Stütz, P.
Behaviour Modelling of Computer-Generated-Forces in Beyond-Visual-Range Air Combat.
DOI: 10.5220/0011306600003274
In Proceedings of the 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2022), pages 327-335
ISBN: 978-989-758-578-4; ISSN: 2184-2841
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
327

unexplored field. Nevertheless, to be able to train
pilots for this type of air combat, the full workflow of
an BVR air combat scenario needs to be modeled.
While some subtasks from the workflow can be
implemented using rule-based mechanisms like finite
state machines or behavior trees (which are part of our
concept as well), it can be challenging to implement
tasks containing many degrees of freedom when
being limited to these techniques. Here, machine
learning methods, and especially reinforcement
learning (RL), can be a promising approach to tackle
these challenges (Dongyuan Hu et al., 2021; Haiyin
Piao et al., 2020). Using these methods, the CGFs are
able to train their behavior themselves to learn
suitable actions for different situations.
Our goal is to review different AI technologies
towards their suitability of generating intelligent CGF
behavior. Within this context, we aim to model a
BVR air combat workflow with the goal to implement
the most promising AI approaches in our CGF
simulation environment. During a later stage, one or
multiple pilots/subject-matter-experts (SMEs) will
pilot the friendly/blue side and fly against the
adversary/red side (AI-controlled CGFs) in order to
validate the CGFs air combat behavior. Here, aside
from validation, special focus will also be placed on
the topic of verification, so the accuracy of the CGF
dynamic can be ensured.
Multiple approaches have been undertaken to
automate CGF behaviour, (Toubman et al., 2016 -
2016) outlines a concept to tackle this challenge by
proposing AI methods which could be used to
generate all the needed CGF manoeuvres during the
whole engagement. However, this approach is less
flexible and the selected method might work well for
some phases of the engagement but not so well at
others. Instead of this, a different concept would be
dividing the beyond-visual-range air combat
workflow into different tasks. With this approach,
aside from keeping overview and structure, this opens
up the advantage of being able to process each task
using an AI method that suits it well.
Here, the SMEs who are supposed to validate the
CGF behaviour in our experimental campaign,
specified multiple AI method requirements. These
include, but are not limited to: the CGF behaviour
should be explainable, reproduceable, changeable
and defined. One particular AI method that fulfils all
these upper requirements are Behaviour Trees (BTs),
which additionally have storable rulesets so a certain
behaviour can also be replayed. In (Siqi Yi et al.,
2021), it was further demonstrated that using BTs, it’s
possible to “perform a series of actions to react to
adverse situation”, concluding that BTs are able to
adapt dynamically to changes in the engagement.
Because of these advantages, BTs could be a solid
foundation for modelling the air combat workflow
and some of its subtasks.
For tasks requiring more complex air
manoeuvring, as well as for performing threat
analysis, machine learning methods, especially
reinforcement learning, are an option. There has been
significant progress within this domain within the last
years as shown in AlfaGo (David Silver et al., 2016),
AlfaGo Zero (David Silver et al., 2017), and AlfaStar,
making them a promising approach to tackle these
complex decision problems.
2 DYNAMIC MODELS
In order to obtain accurate and realistic results, our
requirements include validated and verified dynamic
models. We intent to include aircrafts, missiles, radar,
chaff and jammer. We have chosen MATLAB
Simulink (MathWorks) for constructing the models,
since it provides a well-known engineering
environment and offers built-in verification
capabilities (Test Harness). These models are then
converted into C++ Code using Autocode and then
embedded into our experimental system.
This system is implemented using ROS (Open
Robotics, 2020) and communicates with an external
VR flight simulator that will be used by the pilots who
are flying against the CGFs. This simulator and the
CGFs are communicating using DIS. Finally, we are
using Tacview (Raia Software Inc.) as a Debriefing
Tool.
2.1 Aircraft Model
The fighter jet models (CGFs) are constructed using
a modular, generic and dynamic model, which can be
fed with physical data describing (instantiate) the
respective aircraft.
The aircrafts’ state, at a time, is represented using
9 continuous variables: {x, y, z, ψ, θ, φ, v
x
, v
y
, v
z
}.
These represent positions in north (x), east (y) and
down (z) as well as its orientation: roll, pitch and yaw
and its velocity {v
x
, v
y
, v
z
}. Additionally, the CGFs
are simulated with a radar model which reproduces
representative ranges and the limitations of a real
radar. This is important, since the AI methods need to
make behaviour decisions using the same air picture
a real pilot would have access to. For more
information regarding flight dynamics, refer to
(Zipfel, 2007).
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
328

Usually, two or more aircrafts are involved in a
BVR air combat scenario and each aircraft has its own
set of state variables. When making manoeuvring
decisions, the relative geometry between the aircrafts
is relevant. Here, we compute the same state variables
containing the relative values between two aircrafts
{x, y, z, ψ, θ, φ, v
x
, v
y
, v
z
}. However, in this case, we
additionally include the relative azimuth and
elevation angles.
The aircrafts (CGFs) can be controlled using
flight control manoeuvres, tactical manoeuvres and
other actions. Flight control manoeuvres are similar
to an auto-pilot, an example would be to hold a certain
heading or accelerate towards a certain speed.
Tactical manoeuvres are flight instructions with
reference to another aircraft, for example flying a
pure pursuit. These data of these two command types
is specified as a floating-point number (continuous
value in a constraint range). Other actions consist of
commands that are able to deploy chaff, control the
radar/jammer or fire a missile. There are 11 different
control commands so far with the possibility of
adding more if needed.
When a CGF received a flight control manoeuvre,
it doesn't immediately set the aircraft physical state to
the given target value, but smooths out its trajectory
so that the CGF behaves according to real-world
flight dynamics.
2.2 Missile Model
The missiles’ and aircrafts’ states are similarly
composed. Meaning it contains the nine state
variables {x, y, z, ψ, θ, φ, v
x
, v
y
, v
z
}, however,
additionally has a variable to indicate whether the
missile hits the ground. It also contains a variable
which gets triggered if the missile has hit a target (in
order to mimic real-world hit probabilities, we apply
a PK rate here). Missiles are initialized using the same
state as the aircraft state which fires it.
The missile itself can’t be controlled using
commands after it was launched. However, it contains
its own radar model which is able to direct the missile
towards a moving target. During this navigation
process, proportional navigation is used.
2.3 Chaff Model
Aircrafts are able to deploy chaff during an
engagement. Chaff consist of many metal/metallized
articles and are used to confuse radar systems. In our
setup, their functionality is mainly used to divert
missiles from their original target so their trajectory
is directed towards the chaff clouds instead of an
aircraft. The CGFs deploy chaff clouds at once (with
a predefined delay) to ensure the chaff radar signature
gets big enough so the missiles’ radar beam gets stuck
on the chaff cloud.
2.4 Jammer Model
In general, a jammer is used to jam/confuse radars,
either targeting another aircraft or a missile. We aim
to implement multiple types of jammers that can be
used by the CGFs:
• Spot noise jammer: This is used to just emit
strong waves
• False targets: This jammer type is used to
simulate non-existent aircrafts on the
opponents’ radar
• Towed decoy: This jammer consists of a
separate object which is towed behind the
aircraft using a rope. It’s used to divert
missiles away towards the decoy.
3 BVR AIR COMBAT
WORKFLOW
We propose dividing the beyond-visual-range air
combat workflow into three big task loops: Attack,
Self-Defence and Decide. We define the CGFs being
inside the attack loop when an offensive strategy is
being executed, on the opposite side, they are
traversing the self-defence loop when execution of
defensive strategies has priority. Lastly, the decide
block is designated to determine in which of the two
major loops the CGFs should be situated according to
the current air picture as well as deciding if/when the
CGFs should terminate the mission.
Figure 1: OODA Loop. This loop forms the basics of the
workflow.
Behaviour Modelling of Computer-Generated-Forces in Beyond-Visual-Range Air Combat
329
The majority of the tasks follow the observe–
orient–decide–act (OODA) principle (Richards,
2020). It’s a tried and tested principle which has
proven its advantages when used in decision systems
(Henry Leung, 2018) and combat simulations (Aya
Fusano et al., 2011). This loop structure ensures that
the individual tasks always start with collecting and
processing data, so they are able to make informed
decisions with up-to-date information.
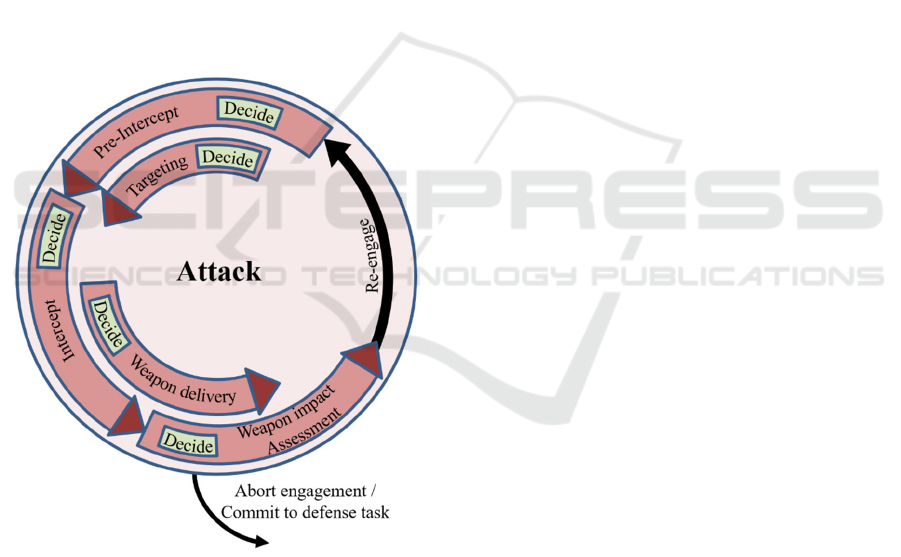
3.1 Attack
The attack loop is the default for the CGFs, meaning
when there is no special reason to go defensive, the
CGFs behave according to the attack loop.
We worked out multiple tasks within the attack
loop. At each point during the engagement, a CGF is
performing one or two tasks of this loop (some tasks
can overlap) while at the same time performing
checks whether the current task is finished: If yes,
move to the next task.
Figure 2: The attack loop workflow as well as its different
tasks are visualized here.
Following are the attack tasks:
• Pre-Intercept: At the beginning of the
scenario, the CGFs are flying an initial
Combat air patrol (CAP) in order to be ready
to engage the blue side and shorten response
times. This continues, until the distance
between the blue side and the CGFs (red side)
has fallen below a certain threshold. After this
happened, the CGFs are instructed to fly in
formation towards the aircrafts from the blue
side.
• Picture Targeting: After enemy contact has
been reported, the Picture Targeting is
performed: This task consists of two subtasks,
first, the risk of each blue aircraft with respect
to the scenario is rated. This rating process
incorporates parameters from the air picture
(see Section 3.3) like speed, height, distance,
and also the targets probable strategy and
intention. Following this, the forces of the blue
side are mapped to the CGFs, giving them
targets to focus on.
• Intercept: Here, summarized, a flight path is
planned and executed with respect to their
assigned target aircraft from the blue side. The
goal is to obtain a superior position that fulfils
the shot criteria with respect to the target.
These include optimizing its aspect angle,
height (energy) and distance. The own risk
level, the predicted target intention/strategy
and the targets weapon-engagement-zone
(WEZ) also affect the shot criteria. The
decision which manoeuvres should be
executed to achieve the intercept goals are
evaluated constantly, so the CGF is able react
to sudden movement changes from the target.
• Weapon delivery: If the shot criteria are
fulfilled, a decision is made whether a missile
should be fired at all and if yes, the proceeds
firing the missile(s). Following this, the CGF
needs to support its missile before it becomes
active and autonomous. A deeper analysis of
this task can be found in (P. Ruther et al.
2022).
• Weapon impact assessment: 10 – 30 seconds
after the shot, it can be determined whether the
target was hit or not. After this, a decision is
made whether the CGF will go back to
formation, re-engage (go to pre-intercept /
targeting) or go out and terminate the mission
(see decide loop).
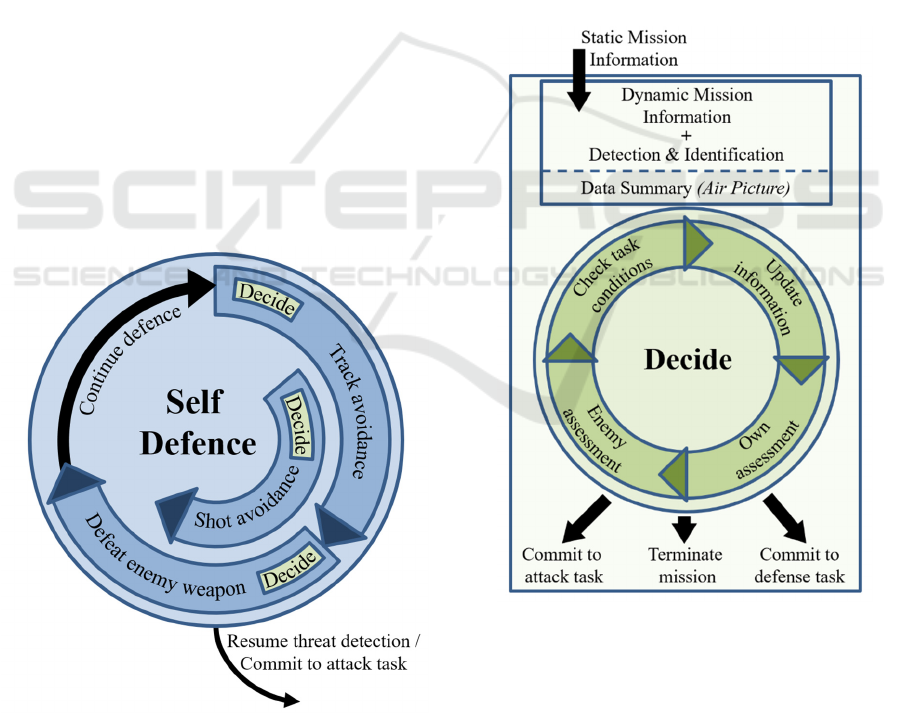
3.2 Self-defence
When the CGFs are facing threatening situations,
they switch to the self-defence loop. As with the
attack loop, we divided it into different tasks,
however, the current task of each CGF here depends
on the danger it currently faces.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
330
The different self-defence tasks fulfil the
following functions:
• Track avoidance: In this stage, the CGF is not
yet within the weapon engagement zone
(WEZ) of the blue side. Therefore, its main
goal is, aside from disrupting the opponent
(chaff, jammer), to escape the threat and
switch back to the attack loop. This can be
done by already selecting potential new targets
and start planning for an intercept towards it.
• Shot avoidance: If the GCF finds itself within
the WEZ of an aircraft from the blue side, but
no missile has been fired towards it yet, shot
avoidance is executed. Here, the main task
consists of executing manoeuvres to get out of
the WEZ together with the use of chaff,
jammer and optimizing the aspect angle.
Special focus is also put on avoiding the no-
escape-zone of the blue side.
• Defeat enemy weapon: This is the worst case,
avoiding the WEZ of the blue side didn't work
and a missile already has been fired towards
the CGF. Now, avoiding the missile is the
main goal. To achieve this, the CGF is using
chaff and jammer (towed decoy) to confuse
the missiles radars as well as trying to
manoeuvre out of the missile trajectory.
Figure 3: The workflow as well as the different tasks of the
self-defence loop are visualized here.
3.3 Decide
The decide loop is not a task sequence like the attack
and defence loops. Its job is to decide whether the
CGFs should go offensive, behave defensive or
terminate their mission. This decision is evaluated
constantly during the engagement and depends on
multiple properties, which are divided into
static/dynamic mission information as well as
detection and identification (see below). These
properties are then combined to form the air picture
which forms the base for making an informed decision.
Static mission information contains fixed
properties that are already known in advance prior to
the engagement. This includes the own/enemy’s,
possible physical limitations of the aircraft types or
pilot-related limitations (expert level) as well as
further fixed properties from used
aircrafts/missiles/jammers.
Figure 4: Decide process. It’s responsible to choose
whether the CGFs should go offensive or defensive.
Dynamic mission information contains data
regarding the current state during the engagement.
Examples here include the own mission intent and
risk levels as well as variable information regarding
the current mission like fuel or weapon status.
Behaviour Modelling of Computer-Generated-Forces in Beyond-Visual-Range Air Combat
331
Detection and identification are the processes of,
firstly, collecting data from aircraft sensors (radar,
radar-warning-receiver, link) including uncertainties,
and in the second step, analysing this data in order to
identify opponent aircrafts (aircraft type, etc.). All the
collected and processed information then forms the
so-called air picture which is used in the following
decision process.
The decide process itself starts by collecting and
updating all the information from the air picture. It
then proceeds to perform the own assessment in
which the CGFs own chances are evaluated. This also
includes checking whether the CGF is in a threatening
situation, e.g. is tracked/attacked. Afterwards, in the
enemy assessment, the risk/potential superiority of
the enemy, including its intention, etc. are taken into
consideration. Finally, the current task conditions are
checked. The purpose of this is to decide whether the
CGFs can proceed in their current task or if the
situation has changed fundamentally and the task
needs to be aborted (go from offensive to defensive
or the other way). This check varies depending on the
task the CGFs currently are dealing with.
4 GENERATING BVR AIR
COMBAT CGF BEHAVIOUR
Since we are dividing the BVR air combat workflow
into different tasks (Section 3), we have the advantage
of being able to compare and evaluate multiple AI
methods with respect to CGF behaviour generation
for each task separately. While this is a continuous
process and will be part of our future research, we
additionally need a way to guide the CGFs between
the different tasks: Meaning to check whether the
current task is finished/needs to be aborted as well as
invoke the execution of the following task.
4.1 Behaviour Trees: Overview
Behaviour Trees are a mathematical model used for
task execution and decision making. Their origins can
be tracked back to the game industry, where their
initial purpose was to model Non-player character
(NPC) behaviour. Derived from finite state machines
(FSM), they were meant to replace FSMs in video
games. Nowadays, they are a well-established model
that is present in many game frameworks such as
Unreal Engine and Pygame. BTs can be artificially
created using AI algorithms (Luis Peña et al., 2012;
Evgenii Safronov et al., 2020; Matteo Iovino et al.,
2021) or manually designed by humans (Francesco
Rovida et al., 2017; Enrique Coronado et al., 2018;
Chris Paxton et al., 2017). More possible uses span
from robot control systems (Özer Özkahraman &
Petter Ögren, 2020; Oliver Biggar & Mohammad
Zamani, 2020) or human-robot interaction (Dianmu
Zhang & Blake Hannaford, 2020) to even machine
learning (Bikramjit Banerjee, 2018).
In our case, we decided to employ BTs for guiding
the CGFs between the different tasks because they
fulfil all the requirements given by the SMEs and
provide a solid foundation to model the workflow.
Since the SMEs are from a different domain, it is also
appreciated by them that BTs are also suitable for
non-expert programming (David C. Shepherd et al.,
2018; Enrique Coronado et al., 2018). Because of
these reasons, we additionally intent to explore the
use of BTs for modelling other tasks within BVR air
combat as well.
4.2 Behaviour Trees: Application
Since we are implementing our system in ROS2
(Open Robotics, 2020), we have decided to use the
BT implementation ‘BehaviorTree.CPP’ (Davide
Faconti, 2018). It supports a seamless integration into
ROS and also comes with an editor that allows
visualization (see Figure 5) and modification of the
trees using a user-friendly GUI interface called
‘Groot’. Within our experimental apperatus, we intent
to employ a BT calling different AI methods (see
Figure 6) depending on which tasks should be
executed and then redirect their output back to the
CGFs.
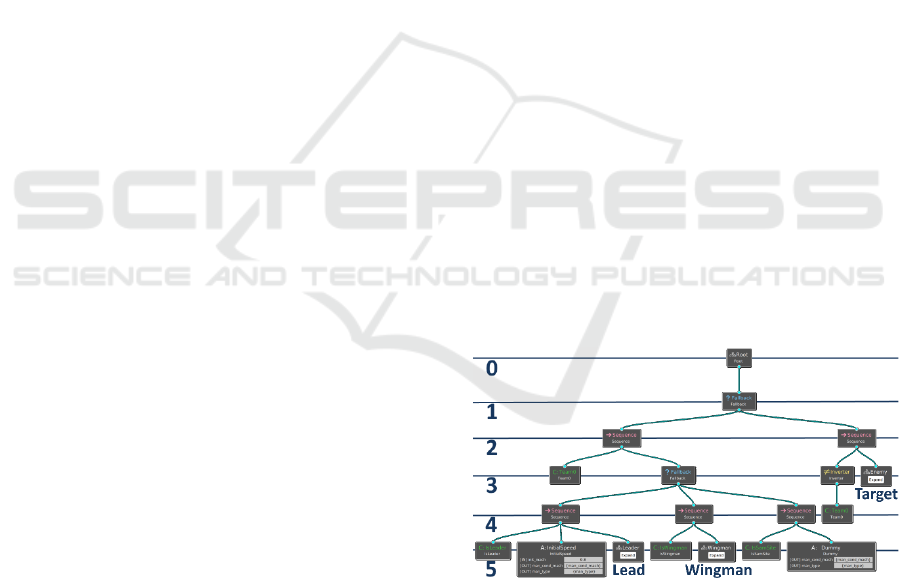
Figure 5: Behaviour Tree containing 6 main levels capable
of executing a Baseline Intercept including the three
subtrees: Lead, Wingman and Target. Level 0 consists of
the root node. Level 1 is responsible to determine to which
forces the aircraft belongs to. Level 2 only executes
sequential commands. Level 3 performs a check whether
the aircraft is Lead/Wingman, or contains its behavioural
subtree if it’s the Target. Level 4 mainly executes sequence
commands again. Finally, at Level 5 reside the subtrees for
Lead/Wingman behaviour as well as initialization
commands.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
332
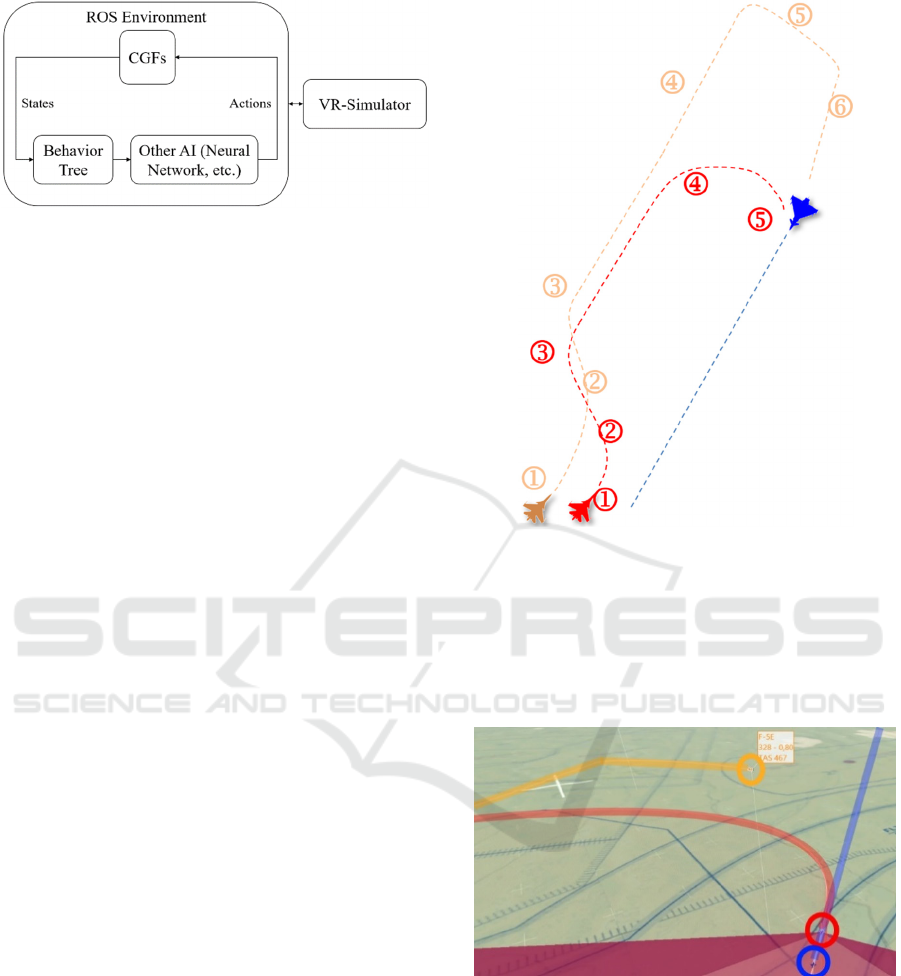
Figure 6: Behaviour Tree workflow in our experimental
system. Our implementation (within ROS) consists of the
CGFs as well as their behaviour which will be generated
using BTs calling different AI methods depending on the
current air combat task. ROS is communicating with an
external VR-Simulator in which pilots (humans) can fly
against our CGFs.
In order to prove the suitability of BTs for our
aim, we implemented multiple BVR air combat
sample scenario behaviours using BTs. One of these
engagements consists of a Baseline Intercept in which
two CGFs (lead: red, wingman: brown) are flying
towards one target aircraft (blue) in order to identify
it (see Figure 7). Using our implementation, we were
able to successfully execute the Baseline Intercept
using BTs (see Figure 8), therefore showing their
ability to dynamically adapt to scenario changes
during the execution and generate CGF behaviour
accordingly. Finally, in this sample scenario, the
advantage of subtrees can be seen as well, since the
behaviour for Leader, Wingman and Target (see
Figure 5) is modelled using these, so a structured
view can be preserved.
5 CONCLUSION AND FURTHER
OUTLOOK
In our concept, together with pilots, we elaborated a
BVR air combat workflow and divided it into
different parts. Combining this with validated and
verified dynamic models, we set the foundation to
obtain accurate and realistic simulation results.
Behaviour Trees have been proven to be a suitable
method to model tasks during the engagement. In the
future, we intent to further evaluate different AI
methods, especially with respect to tasks
incorporating more degrees of freedom. Initial work
within this field can already be read in (P. Ruther et
al., 2022).
Figure 7: Execution of the sample scenario “baseline
intercept”. Lead (red) starts with a pure pursuit towards the
blue target (1), then flies different headings (2, 3) to
approach the target, followed by continuing its pure pursuit
(4) until the final heading (5) is reached. Wingman (brown)
starts by flying different headings (1-4) in order to get
behind the target, then proceeds with turning (5) and
finalises with a pure pursuit (6) towards the target.
Figure 8: Debriefing tool Tacview (Raia Software Inc.)
visualising the execution of a Baseline Intercept (see Figure
7) at stage 5 using BTs for air combat behaviour generation.
Visualised are Lead (red), Wingman (brown) and Target
(blue) as well as their flown trajectories.
REFERENCES
Aya Fusano, Hiroshi Sato, & Akira Namatame (2011).
Multi-Agent Based Combat Simulation from OODA
and Network Perspective. In David Al-Dabass,
Behaviour Modelling of Computer-Generated-Forces in Beyond-Visual-Range Air Combat
333

Alessandra Orsoni, Richard J. Cant, & Ajith Abraham
(Eds.), Proceedings of the 13th UKSim-AMSS
International Conference on Computer Modelling and
Simulation, Cambridge University, Emmanuel College,
Cambridge, UK, 30 March - 1 April 2011 (pp. 249–
254): IEEE Computer Society.
Bikramjit Banerjee (2018). Autonomous Acquisition of
Behavior Trees for Robot Control. In 2018 IEEE/RSJ
International Conference on Intelligent Robots and
Systems, IROS 2018, Madrid, Spain, October 1-5, 2018
(pp. 3460–3467): IEEE.
Bohemia Interactive. VBS.
Chris Paxton, Andrew Hundt, Felix Jonathan, Kelleher
Guerin, & Gregory D. Hager (2017). CoSTAR:
Instructing collaborative robots with behavior trees and
vision. In 2017 IEEE International Conference on
Robotics and Automation, ICRA 2017, Singapore,
Singapore, May 29 - June 3, 2017 (pp. 564–571): IEEE.
David C. Shepherd, Patrick Francis, David Weintrop, Diana
Franklin, Boyang Li, & Afsoon Afzal (2018).
[Engineering Paper] An IDE for Easy Programming of
Simple Robotics Tasks. In 18th IEEE International
Working Conference on Source Code Analysis and
Manipulation, SCAM 2018, Madrid, Spain, September
23-24, 2018 (pp. 209–214): IEEE Computer Society.
David Silver, Aja Huang, Chris J. Maddison, Arthur Guez,
Laurent Sifre, George van den Driessche, Julian
Schrittwieser, Ioannis Antonoglou, Vedavyas
Panneershelvam, Marc Lanctot, Sander Dieleman,
Dominik Grewe, John Nham, Nal Kalchbrenner, Ilya
Sutskever, Timothy P. Lillicrap, Madeleine Leach,
Koray Kavukcuoglu, Thore Graepel, & Demis Hassabis
(2016). Mastering the game of Go with deep neural
networks and tree search. Nat, 529, 484–489.
David Silver, Julian Schrittwieser, Karen Simonyan,
Ioannis Antonoglou, Aja Huang, Arthur Guez, Thomas
Hubert, Lucas Baker, Matthew Lai, Adrian Bolton,
Yutian Chen, Timothy P. Lillicrap, Fan Hui, Laurent
Sifre, George van den Driessche, Thore Graepel, &
Demis Hassabis (2017). Mastering the game of Go
without human knowledge. Nat, 550, 354–359.
Davide Faconti, E. (2018). BehaviorTree.CPP.
Dianmu Zhang, & Blake Hannaford (2020). IKBT: Solving
Symbolic Inverse Kinematics with Behavior Tree
(Extended Abstract). In Christian Bessiere (Ed.),
Proceedings of the Twenty-Ninth International Joint
Conference on Artificial Intelligence, IJCAI 2020 (pp.
5145–5148): ijcai.org.
Dongyuan Hu, Rennong Yang, Jialiang Zuo, Ze Zhang, Jun
Wu, & Ying Wang (2021). Application of Deep
Reinforcement Learning in Maneuver Planning of
Beyond-Visual-Range Air Combat. IEEE Access, 9,
32282–32297.
Enrique Coronado, Fulvio Mastrogiovanni, & Gentiane
Venture (2018). Development of Intelligent Behaviors
for Social Robots via User-Friendly and Modular
Programming Tools. In 2018 IEEE Workshop on
Advanced Robotics and its Social Impacts, ARSO 2018,
Genova, Italy, September 27-29, 2018 (pp. 62–68):
IEEE.
Evgenii Safronov, Michele Colledanchise, & Lorenzo
Natale (2020). Task Planning with Belief Behavior
Trees. In IEEE/RSJ International Conference on
Intelligent Robots and Systems, IROS 2020, Las Vegas,
NV, USA, October 24, 2020 - January 24, 2021 (pp.
6870–6877): IEEE.
Francesco Rovida, Bjarne Großmann, & Volker Krüger
(2017). Extended behavior trees for quick definition of
flexible robotic tasks. In 2017 IEEE/RSJ International
Conference on Intelligent Robots and Systems, IROS
2017, Vancouver, BC, Canada, September 24-28, 2017
(pp. 6793–6800): IEEE.
Haiyin Piao, Zhixiao Sun, Guanglei Meng, Hechang Chen,
Bohao Qu, Kuijun Lang, Yang Sun, Shengqi Yang, &
Xuanqi Peng (2020). Beyond-Visual-Range Air
Combat Tactics Auto-Generation by Reinforcement
Learning. In 2020 International Joint Conference on
Neural Networks, IJCNN 2020, Glasgow, United
Kingdom, July 19-24, 2020 (pp. 1–8): IEEE.
Henry Leung (2018). An Integrated Decision Support
System Based on the Human OODA Loop. In Yingxu
Wang, Sam Kwong, Jerome Feldman, Newton Howard,
Phillip C.-Y. Sheu, & Bernard Widrow (Eds.), 17th
IEEE International Conference on Cognitive
Informatics & Cognitive Computing, ICCI*CC 2018,
Berkeley, CA, USA, July 16-18, 2018 (p. 4): IEEE
Computer Society.
Joao P. A. Dantas, Andre N. Costa, Diego Geraldo, Marcos
R. O. A. Máximo, & Takashi Yoneyama (2021).
Engagement Decision Support for Beyond Visual
Range Air Combat. CoRR, abs/2111.03059.
Luis Peña, Sascha Ossowski, José Marña Sánchez, &
Simon M. Lucas (2012). Learning and evolving combat
game controllers. In 2012 IEEE Conference on
Computational Intelligence and Games, CIG 2012,
Granada, Spain, September 11-14, 2012 (pp. 195–202):
IEEE.
MathWorks. MATLAB.
Matteo Iovino, Jonathan Styrud, Pietro Falco, & Christian
Smith (2021). Learning Behavior Trees with Genetic
Programming in Unpredictable Environments. In IEEE
International Conference on Robotics and Automation,
ICRA 2021, Xi’an, China, May 30 - June 5, 2021 (pp.
4591–4597): IEEE.
Oliver Biggar, & Mohammad Zamani (2020). A
Framework for Formal Verification of Behavior Trees
With Linear Temporal Logic. IEEE Robotics Autom.
Lett., 5, 2341–2348.
Open Robotics (2020). ROS2: Foxy Fitzroy.
Özer Özkahraman, & Petter Ögren (2020). Combining
Control Barrier Functions and Behavior Trees for
Multi-Agent Underwater Coverage Missions. In 59th
IEEE Conference on Decision and Control, CDC 2020,
Jeju Island, South Korea, December 14-18, 2020 (pp.
5275–5282): IEEE.
P. Ruther, M. Strohal, & P. Stütz (2022). Conceptual
approach for optimizing air-to-air missile guidance to
enable valid decision-making.
Presagis (2016). STAGE.
Raia Software Inc. Tacview.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
334

Richards, C. (2020). Boyds OODA Loop. Necesse, 142–
165.
Siqi Yi, Stewart Worrall, & Eduardo M. Nebot (2021). A
Persistent and Context-aware Behavior Tree
Framework for Multi Sensor Localization in
Autonomous Driving. CoRR, abs/2103.14261.
Toubman, A., Roessingh, J. J., van Oijen, J., Lovlid, R. A.,
Hou, M., Meyer, C., Luotsinen, L., Rijken, R., Harris,
J., & Turcanik, M. (2016 - 2016). Modeling behavior of
Computer Generated Forces with Machine Learning
Techniques, the NATO Task Group approach. In 2016
IEEE International Conference on Systems, Man, and
Cybernetics (SMC) (pp. 1906–1911): IEEE.
V. Chandrakanth, V. S. N. Murthy, & Sumohana S.
Channappayya (2022). UAV-based autonomous
detection and tracking of beyond visual range (BVR)
non-stationary targets using deep learning. J. Real Time
Image Process., 19, 345–361.
Zipfel, P. H. (2007). Modeling and simulation of aerospace
vehicle dynamics. (2nd ed.). AIAA education series.
Reston, Va.: American Institute of Aeronautics and
Astronautics.
Behaviour Modelling of Computer-Generated-Forces in Beyond-Visual-Range Air Combat
335
