
Resilient Conflict-free Replicated Data Types without Atomic Broadcast
Daniel Brahneborg
1 a
, Wasif Afzal
2 b
and Saad Mubeen
2 c
1
Braxo AB, Stockholm, Sweden
2
M
¨
alardalen University, V
¨
aster
˚
as, Sweden
Keywords:
Resilience, Data Replication.
Abstract:
In a distributed system, applications can perform both reads and updates without costly synchronous network
round-trips by using Conflict-free Replicated Data Types (CRDTs). Most CRDTs are based on some variant
of atomic broadcast, as that enables them to support causal dependencies between updates of multiple objects.
However, the overhead of this atomic broadcast is unnecessary in systems handling only independent CRDT
objects. We identified a set of use cases for tracking resource usage where there is a need for a replication
mechanism with less complexity and network usage as compared to using atomic broadcast. In this paper,
we present the design of such a replication protocol that efficiently leverages the commutativity of CRDTs.
The proposed protocol CReDiT (CRDT enhanced with intelligence) uses up to four communication steps
per update, but these steps can be batched as needed. It uses network resources only when updates need
to be communicated. Furthermore, it is less sensitive to server failures than current state-of-the-art solu-
tions as other nodes can use new values already after the first communication step, instead of after two or more.
1 INTRODUCTION
Many distributed systems need to efficiently manage
external resources. These resources could be, e.g.,
network traffic, the number of times to show a spe-
cific web advertisement, and more. In this work, we
will consider an application with one or more users,
each one paying for the resources they use. Each user
has a credit balance, representing payments made and
resources used. This balance is then used as basis for
their next invoice. The system clearly must take great
care in maintaining these credit balances.
Regardless of how reliable modern computer
components have become, occasional server outages
are unavoidable (Aceto et al., 2018; Bailis and Kings-
bury, 2014). In order to make the service avail-
able despite these server outages, we need multiple
servers (Cheng et al., 2015; Rohrer et al., 2014; Roth-
nie and Goodman, 1977; Vass et al., 2020), preferably
independent and geographically separated (Dahlin
et al., 2003). The challenge is to maintain accurate
records of the resource consumption across all these
servers.
Unfortunately, maintaining consistency in a dis-
a
https://orcid.org/0000-0003-4606-5144
b
https://orcid.org/0000-0003-0611-2655
c
https://orcid.org/0000-0003-3242-6113
tributed system can easily lead to decreased perfor-
mance (Didona et al., 2019), and in the presence
of network partitions, fully distributed consistency
and high availability simply cannot co-exist (Brewer,
2000; Gilbert and Lynch, 2004). An interesting
exception was identified by Alsberg and Day (Als-
berg and Day, 1976), suggesting what is basically
a precursor to Conflict-free Replicated Data Types
(CRDTs) (Shapiro et al., 2011):
“An example [of a specific exception] is an
inventory system where only increments and
decrements to data fields are permitted and
where instantaneous consistency of the data
base is not a requirement.”
CRDTs have become popular for distributed sys-
tems over the past few years, partly because of their
convenient property of having the same value regard-
less of the order of the operations performed on them.
When instantaneous consistency is not required, local
operations can be performed on them immediately,
without the need for time-consuming network round-
trips. The new state is instead regularly broadcast to
the other nodes. All nodes therefore eventually get the
same value for the object. There are two main groups
of CRDTs:
State-based CRDTs send their full state (Carlos Ba-
quero, Paulo S
´
ergio Almeida, Alcino Cunha,
516
Brahneborg, D., Afzal, W. and Mubeen, S.
Resilient Conflict-free Replicated Data Types without Atomic Broadcast.
DOI: 10.5220/0011314500003266
In Proceedings of the 17th International Conference on Software Technologies (ICSOFT 2022), pages 516-523
ISBN: 978-989-758-588-3; ISSN: 2184-2833
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2017) between the nodes. This makes them im-
mune to both packet loss and packet duplications,
but it can quickly lead to excessive network usage
for data types with a large state, and to massive
storage requirements when there is a high number
of clients (Almeida and Baquero, 2019). A spe-
cial case of these are delta-based CRDTs, which
only transmit the part of the state changed by local
updates (Almeida et al., 2018; Enes et al., 2019).
Operation-based CRDTs send only the individual
operations (Baquero et al., 2017). These typically
use less network resources, but require reliable
delivery where all operations are successfully re-
ceived by all nodes exactly once (Younes et al.,
2016).
Even if the operation order on a single CRDT ob-
ject does not matter, many applications update an ob-
ject based on the values of another. In order to en-
force such causal dependencies, most CRDT imple-
mentations use reliable causal broadcast (RCB) where
all nodes get the same set of packets in more or less
the same order (Birman and Joseph, 1987; Schneider
et al., 1984). RCB is typically based on atomic broad-
cast, which can ensure not only that all packets are
delivered in the same order, but also that this happens
only if all nodes are still reachable. A simple way
to implement atomic broadcast is Skeen’s algorithm,
which requires a set of network packets sent back to
the sender, and then a third set of “commit” (Gotsman
et al., 2019) packets to all destinations from which
the sender got the reply. When the causality check is
based only on Lamport clocks (Lamport, 1978) this
can give false positives, in turn leading to unneces-
sary network traffic and delays (Bauwens and Boix,
2021).
The purpose of this work is to find a replication
protocol for state-based CRDTs not having any causal
dependencies, where the replication uses less network
resources than previously proposed solutions. We
use user credits as the motivating example, typically
implemented as CRDT PN-counters (Shapiro et al.,
2011). In short, a PN-counter is a set of pairs of in-
tegers Z, merged by the operation max(), where the
integers are used for positive and negative changes,
respectively. Its value is the difference between these
two integers. We refer to the paper by Shapiro et al.
for a more detailed description.
Our proposed protocol CReDiT (CRDT enhanced
with intelligence) extends state-based CRDTs by aug-
menting the local state with additional information in
order to avoid unnecessary network traffic. All data
is periodically resent until it has been acknowledged
by each other node, making the protocol immune to
occasional packet loss.
We will describe this work using Shaw’s frame-
work (Shaw, 2001), which categorizes research in
three different ways. First is the research setting,
which is what kind of research question or hypothe-
sis is being addressed. Our setting is Methods/Means,
described in Section 2. Next is the research approach.
Here the desired result is a new Technique, described
in detail in Section 3. The third way is the result val-
idation, which is done in Section 4. We discuss the
results in Section 5, present related work in Section 6,
and end the paper with our conclusions in Section 7.
2 METHOD
In Shaw’s framework (Shaw, 2001), the purpose of
a “Methods/Means” setting is to find an answer to
a research question such as “what is a better way to
accomplish X”. After defining our system model in
Section 2.1, we will therefore define our “X” in Sec-
tion 2.2, and what we mean by “better” in Section 2.3.
2.1 System Model
We assume that we have a distributed system of in-
dependently running nodes, communicating over an
asynchronous network. The physical network can use
any topology, as long as there is at least one logical
path between each pair of nodes. We further assume
fair-lossy links, i.e., packets may be dropped, but if a
packet is sent infinitely often it will eventually be re-
ceived. Packets may also be duplicated and received
out of order. The nodes have local memory and sta-
ble storage, and can recover after crashing. We also
assume there are some number of clients, each one
connecting to any node or nodes. As the clients send
requests to a node, their resource counter in that node
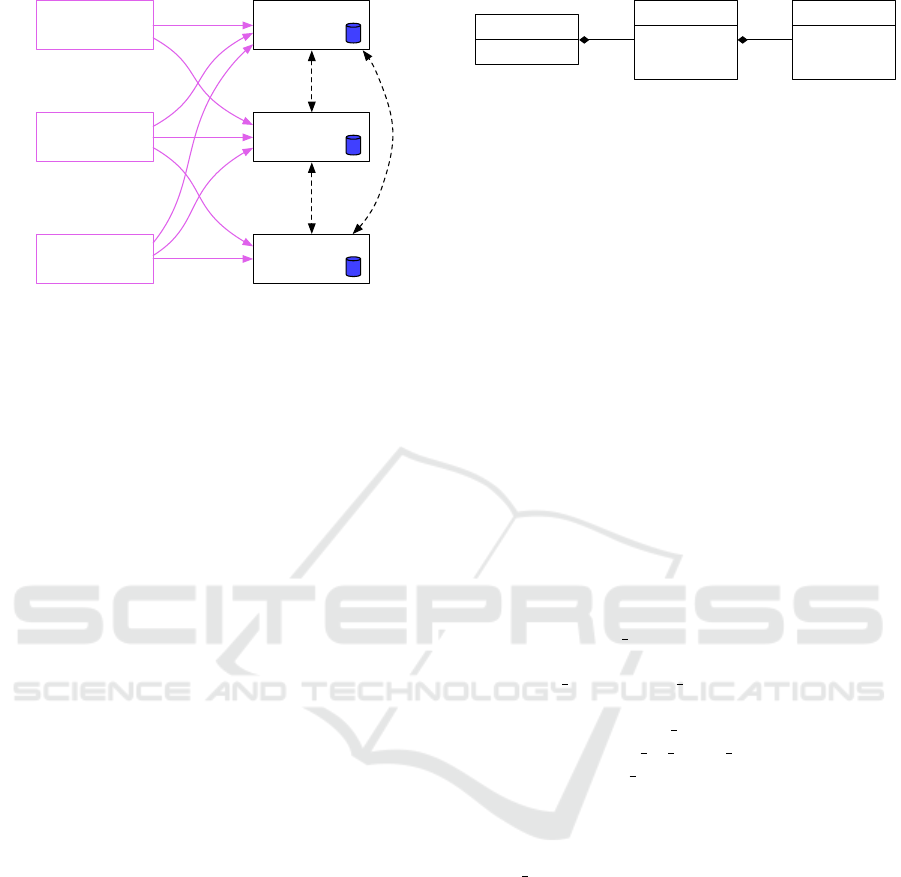
is updated. Figure 1 shows the situation with x clients
and y nodes. This work addresses the communication
between the nodes, shown with dashed lines.
2.2 Functional Requirements
The functionality we need, i.e. our “X”, matches al-
most exactly what Almeida and Baquero (Almeida
and Baquero, 2019) call eventually consistent dis-
tributed counters (ECDCs). These use the increment
operation for updating the counter, and fetch for read-
ing its current value. Fetch returns the sum of up-
dates made. A second call to fetch returns the previ-
ous value plus any locally made updates since the pre-
vious call. Eventually, fetch will return the same value
on all nodes, i.e., the above named sum of updates. In
addition to an ECDC, we also allow negative updates,
Resilient Conflict-free Replicated Data Types without Atomic Broadcast
517
Client 1 Node 1
Client 2
Client x
Node 2
Node y
. . . . . .
Figure 1: We have x clients connected to y nodes, which in
turn are all connected to each other. Each node maintains
its own database of the credit balance for each client.
which means we can count both the resources used
and the payments made.
2.3 Quality Requirements
We also need to specify our quality requirements,
i.e. what we mean by “better”. We base these on
ISO 25010 (ISO/IEC, 2020), a taxonomy which puts
quality attributes into eight different groups of char-
acteristics, each one divided into a handful of sub-
characteristics. The latter are written below in the
form Main characteristic / Sub-characteristic.
The CAP theorem (Brewer, 2000; Gilbert and
Lynch, 2004) tells us that given a network partition,
we cannot have both data consistency and availabil-
ity. With the ISO 25010 nomenclature, this means
we need to choose between Functional Suitability /
Functional Correctness (the needed degree of preci-
sion) and Reliability / Availability. We strongly prior-
itize the latter, as it is usually a good business decision
to let customers keep using your service, even when
facing the risk of occasional overdrafts.
For the Performance Efficiency / Capacity, we as-
sume the system has up to about 10 nodes, and that
there are up to 1000 clients using its resources. For
now, we do not address the remaining quality charac-
teristics in ISO 25010 (ISO/IEC, 2020).
Assuming that all clients are independent, we can
model the time between each update for each client
using the exponential distribution. This distribution
has the probability density function f (x) = λe
−λx
, and
the cumulative distribution function (CDF) P(X <
x) = 1 − e
−λx
. In both functions λ is the inverse of
the client specific mean interval µ, and x is the length
of the interval.
This CDF has an interesting property, as it is al-
ways less than 1. In other words, there will always ex-
ist a time interval of length x without any updates. If
entry[]
pn_t
p
n
flags[]
entry_t
sent_at
confirmed
force
gr_pn_flags_t
Figure 2: The three data types used by CReDiT.
x is measured in seconds, we will have an alternating
sequence of some number of seconds with updates,
and some other number of seconds without.
3 PROPOSED TECHNIQUE
Our proposed protocol is based on PN-
counters (Shapiro et al., 2011), augmented with
data to keep track of the values on the other nodes.
This data, and how it is used, is described in Sec-
tion 3.1. Section 3.2 describes the protocol as a state
machine, and Section 3.3 shows a sample scenario
in a system with two nodes. The protocol is named
CReDiT, inspired by its basis in CRDT.
3.1 Prototype Implementation
We assume the application has some sort of collec-
tion of resource counters. For the network communi-
cation, CReDiT uses a separate transport layer. Each
counter, named pn t in our implementation, contains
a map from node identifiers to instances of the struc-
ture entry t. An entry t contains the two fields p
and n, just as the original PN-counters.
We extend the entry t structure with a map from
node identifiers to gr pn flags t structures, contain-
ing the fields sent at, confirmed, and force, de-
scribed below. These fields are therefore specific for
each pair of nodes. The three types are shown in Fig-
ure 2.
sent at: timestamp
This is the most recent time the current value was
sent to the other node. In our implementation, for
simplicity but without any loss of generality, we
use a resolution of one second for this field.
confirmed: boolean
This is set when the incoming values from another
node are identical to what is stored locally, so we
know that we do not need to send the same data to
that node again.
force: boolean
This is set when a value must be sent on the next
flush, overriding the confirmed flag.
In the function descriptions below, we use A for
the local node where the code is executed, B for one
of the remote nodes, entry for the instance of the
ICSOFT 2022 - 17th International Conference on Software Technologies
518
entry t structure on A, x for a random node, and * to
designate all nodes. The protocol uses the functions
listed below, of which only flush() and receive()
perform any network operations. We have marked the
original PN-counter functionality with “PN” and our
additions with “New”.
init(x, p, n)
This is used when loading values from external
storage on startup.
PN: It sets entry[x].p and entry[x].n to the
supplied values.
New: It clears entry[x].flags[*].
update(delta)
This is called to update the resource counter.
PN: If the delta is positive, entry[A].p is
increased with delta, and if it is negative,
entry[A].n is increased with -delta.
New: As we know that node A is the only one
updating the entry[A] fields, no other node has
these exact values now, and we can therefore clear
the entry[A].flags[*].confirmed flags.
fetch()
This function is called by the application to get
the current value of the counter.
PN: It returns the sum of all entry[*].p fields
minus the sum of all entry[*].n fields.
flush()
This should be called regularly by the application,
in order to initiate the replication.
New: Entries are sent if the force flag is set, or if
the confirmed flag is not set and sent
at is dif-
ferent than the current time. Afterwards, sent at
is set to the current time, and force is set to false.
The use of sent at here allows the application
layer to call this function as often as it wants. In
contrast to solutions based on atomic broadcast,
CReDiT does not wait for any replies from the
other nodes.
receive(B, x, p, n)
This function is called by the transport layer,
when new data has been received from node B
concerning values on node x.
PN: The field entry[x].p is updated to the max-
imum of its current value and the incoming p, and
similarly for entry[x].n and n.
New: If entry[x].flags[B].confirmed is
set, entry[x].flags[B].force is set. If
entry[x].p or entry[x].n was changed,
entry[x].flags[B].force is also set and
entry[x].flags[*].confirmed are cleared.
The entry[x].flags[B].confirmed flag is
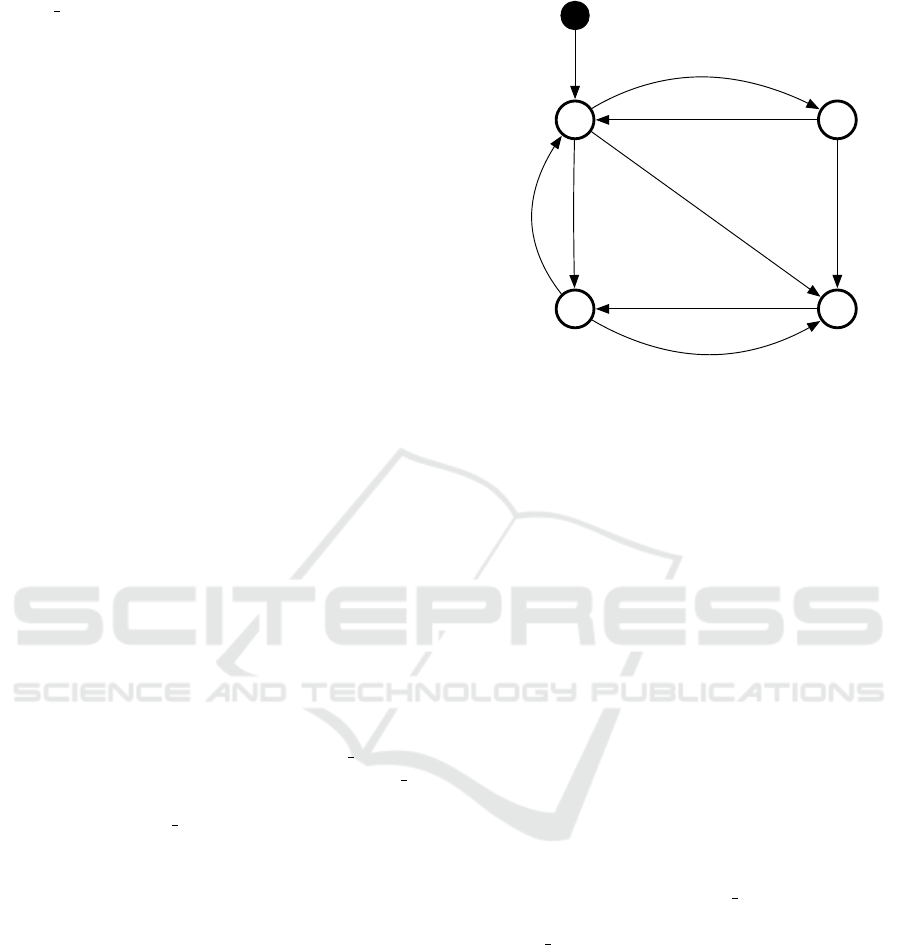
2
0
on flush(): send()
receive
(same)
receive
(different)
update()
next second
1
receive()
3
receive()
on flush(): send()
Figure 3: States on a node. Each pair of nodes has its own
state. The black circle is the starting point. For the states
1 and 3, the force flag is set. For the states 2 and 3, the
confirmed flag is set.
always set though, as we know that node B has
these particular values. Finally a callback is made
to the application, which can now persist the new
data. This persisted data is what the application
should provide to the init() function after being
restarted.
Our implementation was based on GeoRep (Brah-
neborg et al., 2020), which supplied networking code
and configuration management for keeping track of
the nodes to which data should be replicated.
3.2 State Machine
Figure 3 shows a compact summary of the algorithms
and the effects of the flags. There is a separate state
machine for each individual counter, and for all pairs
of nodes. The state of each machine is an effect of
the node specific flags in entry t: If the force flag
is set or if the current time differs from the value of
the sent at attribute, the machine is in state 1 or 3.
If the confirmed flag is set, it is in state 2 or 3. Each
counter starts at the filled black circle, and immedi-
ately goes to state 0. This represents the case when
both force and confirmed are false. In all states,
update() and receive() update the corresponding
(p, n) pair(s). All functions described in Section 3.1
can be called in any of these four states, but functions
not affecting a particular state are omitted for clarity.
3.3 Data Flow
In a system with the two nodes A and B, these are the
steps taken when A updates a shared counter.
Resilient Conflict-free Replicated Data Types without Atomic Broadcast
519

1. A updates the value of a new counter with +2.
This creates the counter, and A sets p=2 and n=0
in entry[A].
2. After at most one second, A moves B to state 1.
On the next call to flush() from the application
layer, the values for A are sent to B, after which A
sets entry[B].sent at to the current time.
3. When B receives this data, it stores A’s values p=2
and n=0, and sets the flags confirmed and force
in entry[A].
4. As A has sent at=now for B and force is not
true, any additional calls to flush() will not
cause more data to be sent to B.
5. B has force set to true for A, so the next time
flush() is called on B, the (p=2, n=0) pair for A
is sent back to A.
6. Next, A gets the (p=2, n=0) pair for A from B.
As these are the same values it already has, it sets
confirmed to true for B. It does not set force.
After this, both A and B has confirmed set to
true for each other, and agree on the (p=2, n=0)
pair. No more data is sent by either side.
If the data sent in step 2 is lost, A will obviously
not get this data back from B. When flush() is called
during the next second or later, A will see the missing
confirmed flag and send the data again. This way, the
confirmed flag on node A prevents repeated trans-
missions of the same data from A to B. As we assume
fair-lossy links as mentioned in Section 2.1, B will
eventually receive this data.
If the data from B to A in step 5 is lost, B will still
have the confirmed flag set, so it will not send the
data again. However, A will not have this flag set, so
it will send the data to B again. From B’s perspective,
as the confirmed flag for this entry is set, A and B
should already have the same data. Hence, as B sees
the same data again from A, it can deduce that A’s
confirmed flag is not set. B can fix that by setting its
force flag for A, causing the data to be sent back to
A on the next call to flush(). This way, the force
flag on node B prevents repeated transmissions of the
same data from node A to B.
The combined effect of the confirmed and force
flags is that any data packet can be lost, and the pro-
tocol will still recover. Once all nodes have the same
set of confirmed values, no more data will be sent un-
til after the next call to update().
4 EVALUATION
Here we discuss the validation of the proposed proto-
col regarding its functionality, correctness, and scala-
bility. As both update() and fetch() only work on
local data, the availability is 100% by construction.
4.1 Functional Validation
We already know that CRDTs in general, and PN-
counters in particular, converge on the same value on
all nodes, thanks to the broadcast and merge mecha-
nisms (Shapiro et al., 2011) also used by CReDiT. We
therefore only need to show that the new fields do not
invalidate this. For sent at this is obvious, as this
field only limits how often data is sent.
The confirmed flag prevents data being sent from
node A to node B, when B has shown that it already
has the exact same values as A. As long as this is
true, sending this data again is of no use to anyone.
When the values on A change, its confirmed flags are
cleared, giving the original CRDT behaviour. If the
values on B change, this field is cleared on B, caus-
ing the data to be broadcast to all nodes, including A,
which in turn clears the field for the other nodes, also
getting us back to the original CRDT behaviour.
As described in Section 3.3, the force flag han-
dles the case when the sent values returned to the
sender (A) are lost. As long as the values on A are
unchanged, A would otherwise keep sending them to
B because no confirmation is received. For new val-
ues sent by A, B would notice the update and send it
back to A, just as for any other CRDT.
4.2 Correctness Conditions
A state-based CRDT ensures that all updates originat-
ing on a particular node can never be done in a differ-
ent order on another node, as its current state always
includes its previous state. Its commutativity further
ensures that even if the relative order of updates made
on different nodes may differ between the nodes, the
value of a CRDT object will eventually be the same
on all nodes. As this order may differ between nodes,
we do not get serializability (Papadimitriou, 1979).
Whether we get linearizability (Herlihy and Wing,
1990) is not entirely clear. Herlihy and Wing states
that the “real-time precedence ordering of operations”
should be respected. This is indeed the case on each
particular node. However, in a distributed system with
nodes A and B we can have a sequence such as the
following.
1. A stores the value 1 in variable x.
2. A stores the value 2 in variable x.
3. B reads the value of variable x.
4. B reads the value of variable x.
ICSOFT 2022 - 17th International Conference on Software Technologies
520

The data replication from node A to node B may
be initiated both after step 1 and 2. Furthermore, the
new data may arrive to node B both before and after
step 3, as well as after step 4. Node B can therefore
see both the values 1, 2, or something else. Still, if
node B would read the value 2 in step 3, we can guar-
antee that step 4 will not read the value 1 (a.k.a. mono-
tonic reads). Also, if node A would read the value of
variable x, after step 1 it would get 1, and after step 2
it would get 2 (a.k.a. read your writes).
4.3 Scalability
The memory usage for each counter is O (n) for the
values, and O(n
2
) for the flags. There is no transac-
tion log as for operation-based CRDTs, so for a given
n the memory requirement is constant.
For an update on node A, up to 4 sets of network
packets are triggered. After these steps, all n nodes
will have the same values, as well as knowing that
the other n − 1 nodes have them too. Because of this
knowledge, no more data is sent until the next update
is made.
1. Node A sends the new (p, n) pair to the other n −1
nodes.
2. After receiving the new pair, these n − 1 nodes
send back their updated values.
3. For a system with 3 or more nodes, the n−1 nodes
has at least one set of flags where confirmed is
not set. So, flush() on these nodes will broad-
cast the updated values to the remaining n − 2
nodes.
4. If a packet in the previous set is received from a
node y on a node x before x has broadcast the up-
date itself, the force flag will be set on node x,
causing the value to again be sent from node x to
node y.
An update will therefore cause a total of up to (n−
1)+(n −1) +(n− 1)(n− 2)+(n −1)(n −2) = 2(n −
1)
2
network packets to be sent in the system. This
quadratic scale-up makes this protocol unsuitable for
systems with a large number of nodes, even though
the decision for when this is true must be done on a
case by case basis.
The packet size will be proportional to the number
of updated counters since the last confirmation, but it
is not affected by the number of updates to a particular
counter. The number of updates also has no effect on
the number of required network packets, making the
quadratic scale-up less of a problem than it may seem.
Additionally, counters with no updates on a par-
ticular node, after its confirmed flag is set, stay in
state 2 in the state machine shown in Figure 3. In this
state flush() generates no network traffic.
4.4 Real-world Evaluation
There are a couple of seemingly obvious measure-
ments that could be used in order to evaluate pro-
tocol behaviour in real-world situations. First, we
could measure the number of function calls per sec-
ond. However, as all functions either just modify lo-
cal data structures or are asynchronous, this would
effectively only measure the CPU speed of our test
machines. Second, we could measure the time from
when flush() is called until the data has reached
all other nodes. Unfortunately, this would just mea-
sure the round-trip time between the nodes. Third, we
could compare some performance aspect of the appli-
cation that originally triggered this work. Currently,
the best solution for that application appears to be us-
ing a replicated MySQL server. However, we have
not found any way to do the required multi-master
replication with geo-separated nodes, while still get-
ting acceptable performance (of at least 1000 updates
per second).
Instead, we will compare our protocol with PN-
counters based on atomic broadcast. In particular,
we have observed that for counters with updated data,
most algorithms for atomic broadcast use fewer com-
munication steps than CReDiT does. For counters
without updates, CReDiT uses fewer. So, we want
to measure the relative frequency between these two
cases. From two production systems running the mo-
tivating application mentioned above, we retrieved
sample log files containing the time stamps of events
that would trigger an update of one of our counters.
The first file covers an interval of 91 hours in the
middle of September 2021, with a total of 78 987
events. Within this interval we observed the occur-
rence of events during each hour, but only during
3358 out of a total of 5460 minutes, and during 35 166
out of the total of 327 600 seconds. Despite an aver-
age of 0.241 events per second, there is an event only
during 10.7% of the seconds in this interval. The sec-
ond file covers 6 hours in August 2021, during which
there were 328 948 events, an average of 11.4 events
per second. Still, there was at least one event during
only 28357 of the included 28800 seconds (98.5%).
We do not have enough data points to find the most
fitting statistical distribution for the events handled by
the application, but it seems to be one of the uneven
ones, e.g. the exponential distribution discussed in
Section 2.3. The periods without any updates, where
CReDiT is maximally efficient, are therefore more
frequent than one perhaps would expect.
Resilient Conflict-free Replicated Data Types without Atomic Broadcast
521

5 DISCUSSION
According to Urb
´
an et al. (Urb
´
an et al., 2000), hav-
ing a designated sequencer serializing all operations
in the system, uses the fewest number of communica-
tion steps per message, namely 2. The trade-off cost
to achieve this is that the sequencer node needs much
outgoing network bandwidth as it does a broadcast of
all messages to all other nodes. Most other atomic
broadcast protocols need more communication steps,
but let each node broadcast its own messages.
As we saw in Section 4.3, our proposed protocol
performs worse than this in both aspects, as it requires
up to 4 communication steps and that all nodes broad-
cast all updated values. When there are no updates,
our protocol instead does not communicate at all.
The round-trip times between each pair of nodes
has little or no effect on this protocol, for several rea-
sons. First, the updated data can be flushed at any in-
terval, which just has to be longer than the maximum
round-trip time. By default, this interval is therefore
1 second. Second, as the data sent is the full new
state of each counter, the number of updates between
each flush does not affect the amount of data sent.
Third, as new data is immediately available to each
node after being received, a temporary delay on one
link between two nodes only affects those two specific
nodes. This improves the reliability of the system, as
updated values sent just before a crash can be used by
the other nodes immediately after being received.
The increased storage requirements caused by our
adding new data fields is well compensated for by the
elimination of chatter on the network during quiet pe-
riods.
6 RELATED WORK
Almeida et al. (Almeida et al., 2018) address a prob-
lem similar to ours. Their δ-CRDTs support both du-
plicated network packets, just as state-based CRDTs
do, and achieving the lower bandwidth requirements
of operation-based CRDTs. Their anti-entropy al-
gorithm (corresponding to our flush()) sends only
the part of the state affected by local operations per-
formed on the current node. For a CRDT with a large
total state this δ-state is typically smaller than the full
state replicated by state-based CRDTs.
One way to ensure that all servers have the same
data is to use a replication protocol which can “guar-
antee that service requests are executed in the same
order at all resource sites” (Alsberg and Day, 1976).
The most common solution to this problem is to
model the system as a replicated state machine, using
a variant of Paxos (Lamport, 1998) or Raft (Ongaro
and Ousterhout, 2014). For the counters we need, the
request order does not matter. The implementation
complexity and network bandwidth required by these
protocols are therefore unnecessary.
Almeida and Baquero (Almeida and Baquero,
2019) defined Eventually Consistent Distributed
Counters (ECDC), which is the same partition toler-
ant abstraction addressed in our work. Their solution,
called Handoff Counters, also works well over unreli-
able networks. Their counters aggregate the values in
a few central nodes, making them scale better accord-
ing to the number of servers than our solution does.
By creating a map of these counters, they would pro-
vide a reasonable solution for our resource counting.
However, the aggregation is rather complex, consist-
ing of a 4-way handshake and 9 data fields.
Skrzypczak et al. (Skrzypczak et al., 2019) also
addressed the synchronization overhead of state ma-
chine replication by using a single network round-trip
for updates and not having a leader. To get lineariz-
ability, they coordinate using the query operations,
with repeated round-trips until the returned values sta-
bilize. In contrast, our protocol can accept both up-
dates and queries during all types of network parti-
tions, and can respond to queries without doing any
additional round-trips.
7 CONCLUSIONS
Generally, layered architectures are good, reducing
the complexity of each individual layer. In the case of
building state-based CRDTs on top of atomic broad-
cast, we saw that the resulting system may use unnec-
essary network resources. By instead taking advan-
tage of the lack of causality between the operations
of our CRDT counters, we were able to design a new
protocol with lower network requirements during pe-
riods without updates. The described approach can be
used with any state-based CRDT, as long as it is pos-
sible to determine if the incoming values differ from
the local values.
ACKNOWLEDGMENTS
This work was sponsored by The Knowledge Founda-
tion industrial PhD school ITS ESS-H and Braxo AB.
ICSOFT 2022 - 17th International Conference on Software Technologies
522

REFERENCES
Aceto, G., Botta, A., Marchetta, P., Persico, V., and
Pescap
´
e, A. (2018). A comprehensive survey on in-
ternet outages. Journal of Network and Computer Ap-
plications, 113(2018):36–63.
Almeida, P. S. and Baquero, C. (2019). Scalable Eventually
Consistent Counters over Unreliable Networks. Dis-
tributed Computing, 32:69–89.
Almeida, P. S., Shoker, A., and Baquero, C. (2018). Delta
state replicated data types. Journal of Parallel and
Distributed Computing, 111:162–173.
Alsberg, P. A. and Day, J. D. (1976). A Principle for Re-
silient Sharing of Distributed Resources. In Inter-
national Conference on Software Engineering, ICSE.
IEEE Comput. Soc. Press.
Bailis, P. and Kingsbury, K. (2014). The Network is Reli-
able. Communications of the ACM, 57(9):48–55.
Baquero, C., Almeida, P. S., and Shoker, A. (2017). Pure
operation-based replicated data types. arXiv preprint
arXiv:1710.04469.
Bauwens, J. and Boix, E. G. (2021). Improving the Reactiv-
ity of Pure Operation-Based CRDTs. In Workshop on
Principles and Practice of Consistency for Distributed
Data, PaPoC.
Birman, K. P. and Joseph, T. A. (1987). Reliable Communi-
cation in the Presence of Failures. ACM Transactions
on Computer Systems, 5(1):47–76.
Brahneborg, D., Afzal, W., Cau
ˇ
sevic, A., and Bj
¨
orkman,
M. (2020). Superlinear and Bandwidth Friendly Geo-
replication for Store-and-forward Systems. In Inter-
national Conference on Software Technologies, IC-
SOFT.
Brewer, E. A. (2000). Towards Robust Distributed Sys-
tems. In Principles Of Distributed Computing, PODC.
ACM.
Carlos Baquero, Paulo S
´
ergio Almeida, Alcino Cunha, C. F.
(2017). Composition in State-based Replicated Data
Types. Bulletin of EATCS, 3(123).
Cheng, Y., Gardner, M. T., Li, J., May, R., Medhi, D.,
and Sterbenz, J. P. (2015). Analysing GeoPath di-
versity and improving routing performance in optical
networks. Computer Networks, 82:50–67.
Dahlin, M., Chandra, B. B. V., Gao, L., and Nayate,
A. (2003). End-to-end WAN Service Availability.
IEEE/ACM Transactions on Networking, 11(2).
Didona, D., Fatourou, P., Guerraoui, R., Wang, J., and
Zwaenepoel, W. (2019). Distributed Transactional
Systems Cannot Be Fast. In The ACM Symposium on
Parallelism in Algorithms and Architectures, SPAA,
NY, USA. ACM Press.
Enes, V., Almeida, P. S., Baquero, C., and Leitao, J.
(2019). Efficient Synchronization of State-Based
CRDTs. In International Conference on Data Engi-
neering, ICDE, pages 148–159. IEEE Computer So-
ciety.
Gilbert, S. and Lynch, N. A. (2004). Brewer’s Conjecture
and the Feasibility of Consistent, Available, Partition-
Tolerant Web Services. In Principles Of Distributed
Computing, PODC.
Gotsman, A., Lefort, A., and Chockler, G. (2019). White-
box Atomic Multicast. In International Conference on
Dependable Systems and Networks, DSN. IEEE.
Herlihy, M. P. and Wing, J. M. (1990). Linearizability: a
Correctness Condition for Concurrent Objects. ACM
Transactions on Programming Languages and Sys-
tems (TOPLAS), 12(3):463–492.
ISO/IEC (2020). ISO 25010. https://iso25000.com/
index.php/en/iso-25000-standards/iso-25010. Ac-
cessed 2020-09-12.
Lamport, L. (1978). Time, clocks, and the ordering of
events in a distributed system. Communications of the
ACM, 21(7):558–565.
Lamport, L. (1998). The part-time parliament. ACM Trans-
actions on Computer Systems, 16(2):133–169.
Ongaro, D. and Ousterhout, J. K. (2014). In Search of
an Understandable Consensus Algorithm. In USENIX
Annual Technical Conference.
Papadimitriou, C. H. (1979). The serializability of concur-
rent database updates. Journal of the ACM (JACM),
26(4):631–653.
Rohrer, J. P., Jabbar, A., and Sterbenz, J. P. (2014).
Path diversification for future internet end-to-end re-
silience and survivability. Telecommunication Sys-
tems, 56(1):49–67.
Rothnie, J. B. and Goodman, N. (1977). A Survey of
Research and Development in Distributed Database
Management. In International Conference Confer-
ence on Very Large Data Bases.
Schneider, F. B., Gries, D., and Schlichting, R. D. (1984).
Fault-tolerant broadcasts. Science of Computer Pro-
gramming, 4(1):1–15.
Shapiro, M., Pregui, N., Baquero, C., and Zawirski, M.
(2011). A Comprehensive Study of Convergent and
Commutative Replicated Data Types. Technical Re-
port RR-7506, Inria – Centre Paris-Rocquencourt.
Shaw, M. (2001). The Coming-of-Age of Software Archi-
tecture Research. In International Conference on Soft-
ware Engineering, ICSE. IEEE.
Skrzypczak, J., Schintke, F., and Sch
¨
utt, T. (2019). Lin-
earizable State Machine Replication of State-based
CRDTs without Logs. In Symposium on Principles
of Distributed Computing, PODC. ACM.
Urb
´
an, P., D
´
efago, X., and Schiper, A. (2000). Contention-
Aware Metrics for Distributed Algorithms: Compari-
son of Atomic Broadcast Algorithms. In International
Conference on Computer Communications and Net-
works, IC3N. IEEE.
Vass, B., Tapolcai, J., Hay, D., Oostenbrink, J., and Kuipers,
F. (2020). How to model and enumerate geographi-
cally correlated failure events in communication net-
works. In Guide to Disaster-Resilient Communication
Networks, pages 87–115. Springer.
Younes, G., Shoker, A., Almeida, P. S., and Baquero, C.
(2016). Integration Challenges of Pure Operation-
Based CRDTs in Redis. In Workshop on Program-
ming Models and Languages for Distributed Comput-
ing, PMLDC, New York, NY, USA. Association for
Computing Machinery.
Resilient Conflict-free Replicated Data Types without Atomic Broadcast
523
