
Resilient Control of Interconnected Microgrids Under Attack
by Robust Nonlinear MPC
Sarah Braun
1 a
, Sebastian Albrecht
1 b
and Sergio Lucia
2 c
1
Siemens AG, Otto-Hahn-Ring 6, 81739 M
¨
unchen, Germany
2
TU Dortmund University, August-Schmidt-Straße 1, 44227 Dortmund, Germany
Keywords:
Robust Control, Attack Identification, Mathematical Modeling, Nonlinear Model Predictive Control,
Distributed Control.
Abstract:
With the growing share of renewable energy sources, the uncertainty in power supply is increasing, on the
one hand because of fluctuations in the renewables, but on the other hand also due to the threat of deliberate
malicious attacks, which may become more prevalent due to the growing number of distributed generation
units. It is thus essential that local microgrids are controlled in a robust manner in order to ensure stability
and supply security even in the event of disturbances. To this end, we introduce a mathematical model for in-
terconnected, physically coupled microgrids with renewable generation that are exposed to the risk of attacks.
For optimal energy management and control, we present a resilient framework that combines a model-based
method to identify occurring attacks and a model predictive control scheme to compute robust control inputs.
We demonstrate the efficiency of the method for microgrid control in numerical experiments.
1 INTRODUCTION
In the course of the energy transition, power gener-
ation is undergoing a technological shift toward dis-
tributed generation, mainly from renewable energy
sources. This requires distributed control methods
that can be applied to safety-critical systems in real
time. Decentralized microgrids, combining local de-
mands, generation, and often storage units, increase
the security of supply within the microgrid area, but
create new challenges: Under the uncertainty of re-
newables, one has to address optimal control tasks
like economic generator dispatch, efficient battery
use, or optimal power import and export strategies to
benefit from fluctuating energy prices, see (Olivares
et al., 2014; Mohammed et al., 2019). For the de-
sign of such control schemes, one has to be aware that
distributed systems with many local generators and
consumers provide attackers with many targets. Dis-
tributed control like the tertiary control tasks above
should thus be approached in a robust and secure
manner to provide viable solutions even under uncer-
tainty or in the event of an attack.
a
https://orcid.org/0000-0002-7032-6116
b
https://orcid.org/0000-0002-3647-4043
c
https://orcid.org/0000-0002-3347-5593
An important tool for flexible energy management
in microgrids is model predictive control (MPC),
since it repeatedly computes optimal inputs to the sys-
tem based on measurements at each sampling time,
while it allows to include constraints and economic
costs into consideration. Robust MPC schemes ex-
plicitly take uncertainty into account and typically use
tube-based ideas, see (Mayne et al., 2005), or multi-
stage approaches, see (Lucia et al., 2013), which con-
sider a discrete set of possible scenarios. Robust
MPC cannot only be applied to parametric uncertain-
ties, but also to malicious attacks as illustrated in
(Braun et al., 2021a). Also distributed MPC schemes
for large systems under attack have been proposed,
e.g., in (Wang and Ishii, 2019; Braun et al., 2020).
While robust control can mitigate the impact of un-
known attacks, appropriate countermeasures require
detecting and identifying the attack. (Pasqualetti
et al., 2013) define attack detection and identifica-
tion (ADI) as the tasks to uncover the presence of
an attack and localize all attacked components, re-
spectively. They also establish a widely used math-
ematical framework for control systems under attack.
An overview of physics-based ADI methods for both
linear and nonlinear dynamics is given by (Giraldo
et al., 2018; Arauz et al., 2021). Some approaches
like (Pasqualetti et al., 2013; Gallo et al., 2020) design
58
Braun, S., Albrecht, S. and Lucia, S.
Resilient Control of Interconnected Microgrids Under Attack by Robust Nonlinear MPC.
DOI: 10.5220/0011316500003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 58-66
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
unknown-input observers for ADI, where identifica-
tion typically requires the use of one observer for each
possible attack scenario. To avoid the resulting com-
binatorial nature, others propose optimization-based
methods and compute suspicious attackers by solving
sparse optimization problems like (Pan et al., 2015;
Braun et al., 2021b). Similar to the present work,
several authors examine their methods for robust con-
trol or ADI using the example of interconnected mi-
crogrids such as (Gallo et al., 2020; Ananduta et al.,
2020), which underlines the need for resilient meth-
ods in microgrid control. While (Gallo et al., 2020)
consider low-voltage control and focus on attack de-
tection, (Ananduta et al., 2020) solve economic dis-
patch problems similar to those in this work. They
propose an ADI method based on hypothesis testing
that, however, requires full enumeration of all possi-
ble attack scenarios, which again results in a combi-
natorial complexity. Both use linear dynamic models,
whereas we consider nonlinear battery dynamics.
The contribution of this work consists of a mathe-
matical model for tertiary control of interconnected
microgrids, a novel approach for local attack iden-
tification, and a numerical case study to illustrate a
resilient control framework for attacked microgrids
with uncertain generation. The model, described in
Section 2, includes nonlinear battery dynamics, takes
into account the physical coupling of neighboring mi-
crogrids through dispatchable power exchange, and
covers the possible threat of attacks. To the new mi-
crogrid model, we apply the methods developed in
prior work for attack identification based on sparse
optimization and for robust control against uncertain-
ties and already identified attacks. All approaches are
summarized in Section 3, where we also introduce a
new method for local ADI. We illustrate the potential
of these methods by numerical experiments in Sec-
tion 4, using an example of interconnected microgrids
with uncertain renewable generation under attack.
p
st
i
=-Σp
i
p
g
i
p
l
i
p
m
i
p
tr
ik
p
tr
i j
i
j
k
z
ji
z
ki
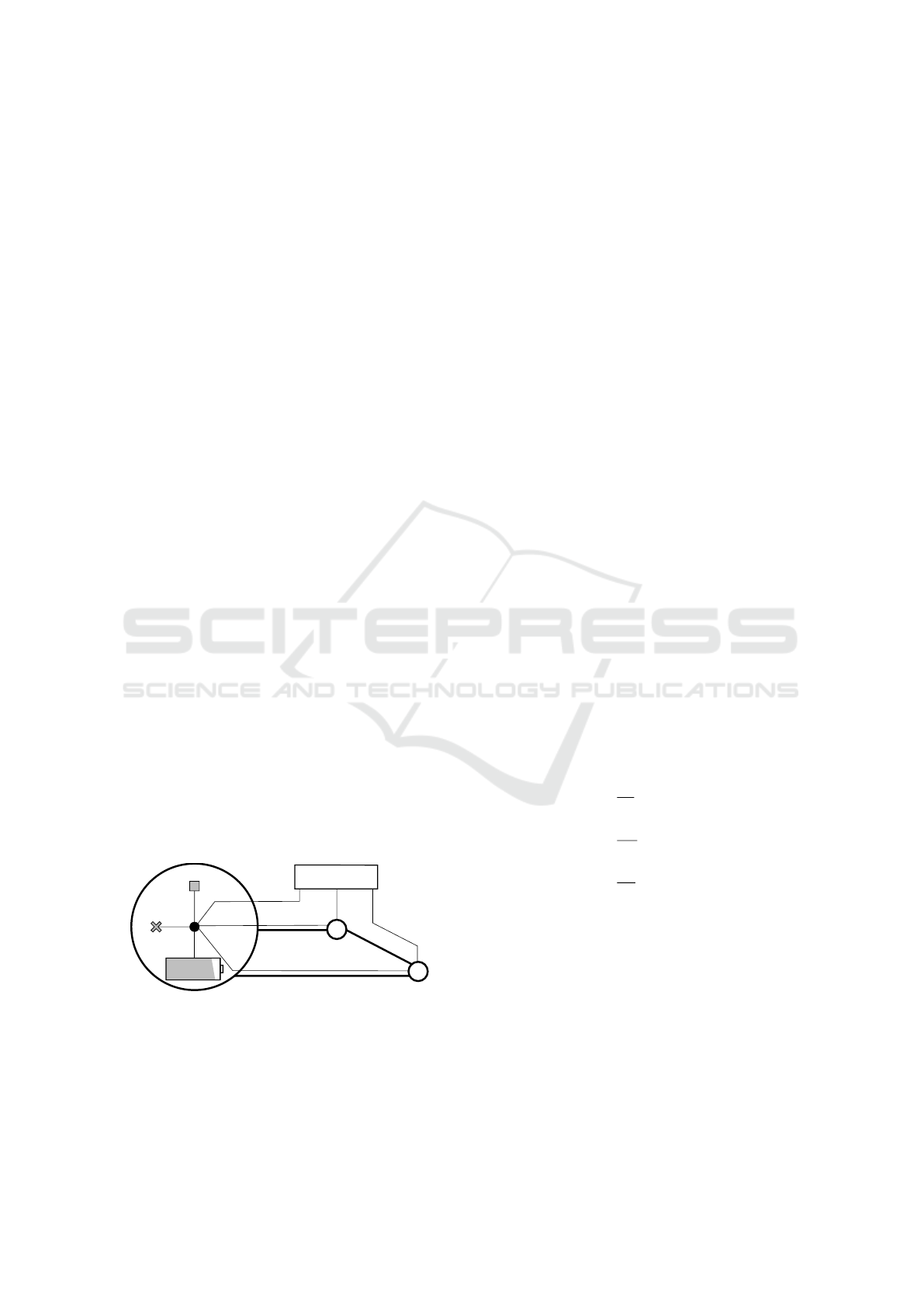
Main grid
Figure 1: Schematic overview of the proposed model for
interconnected microgrids, showing the local model com-
ponents for microgrid i. Apart from internal power states,
each microgrid only requires knowledge of its neighboring
couplings (z
ji
)
j∈N
i
. Storage units are used as a buffer to
maintain power balance.
2 A MODEL FOR
INTERCONNECTED
MICROGRIDS UNDER ATTACK
2.1 Microgrid Model
We consider a set of interconnected microgrids that
are represented by a graph G = (V ,E), where
each node i ∈ V corresponds to a microgrid and
each edge {i, j} ∈ E ⊆ V × V describes two phys-
ically coupled microgrids. Such pairs are called
neighbors and we denote the neighborhood of i as
N
i
:
=
{
j|{i, j} ∈ E
}
. Each microgrid contains dis-
patchable generation units, generating a total power
output p
g
i
≥ 0, and an aggregated load p
l
i
≤ 0. Mod-
eling uncertain load and nondispatchable generation
from renewable energy sources is postponed to Sec-
tion 2.3. Each microgrid is connected to the main
grid, from or to which it can import or export
power p
m
i
. Import is modeled by non-negative val-
ues p
m
i
≥ 0, export by negative values p
m
i
< 0. In
addition, we assume that neighboring microgrids i, j
with j ∈ N
i
can transfer power to each other. The
power that microgrid i sends to a neighbor j is de-
noted by p
tr
i j
and vice versa, and the resulting directed
power flow from i to j is given as p
flow
i j
= p
tr
i j
− p
tr
ji
.
Finally, each microgrid has a storage unit with state
of charge (SoC) s
i
∈ [0,1], from which power p
st
i
> 0
is taken when discharged and which can be charged
with power p
st
i
< 0. Unlike, e.g., (Ananduta et al.,
2020), we assume that generation cannot change in-
stantaneously and model p
g
i
and, similarly, p
m
i
and p
tr
i j
as differential states, whose change over time is con-
trolled by inputs u
g
i
, u
m
i
, and u
tr
i j
according to
˙p
g
i
=
1
T
g
i
u
g
i
− p
g
i
,
˙p
m
i
=
1
T
m
i
(u
m
i
− p
m
i
),
˙p
tr
i j
=
1
T
tr
i j
u
tr
i j
− p
tr
i j
.
(1)
The delay parameters T
g
i
,T
m
i
, and T
tr
i j
∈ R describe
how quickly a change in the input affects the state and
depend on technical characteristics. Compared to T
g
i
,
for power transfers with the main grid or neighboring
microgrids, typically smaller delay times T
m
i
and T
tr
i j
are chosen as we will see in our numerical example in
Section 4. We assume that low-level controllers in all
units ensure that the computed set points are met at all
times. To make sure that the power balance in micro-
grid i is always satisfied, even when an attack occurs,
the storage is used as a buffer that provides the re-
quired power reserves. To this end, the storage power
Resilient Control of Interconnected Microgrids Under Attack by Robust Nonlinear MPC
59

p
st
i
is modeled as a dependent variable that is com-
puted from the states p
g
i
, p
m
i
and p
tr
i j
and the load p
l
i
according to
p
st
i
= −p
g
i
− p
m
i
− p
l
i
−
∑
j∈N
i
p
tr
ji
− p
tr
i j
.
It should be noted here that for microgrid i, p
tr
i j
is a
local state that can be controlled via u
tr
i j
as in eq. (1),
whereas the neighboring state p
tr
ji
can neither be con-
trolled by microgrid i nor is its dynamic behavior
known to i. Instead, it represents a coupling vari-
able z
ji
= p
tr
ji
, that models the physical connection
of neighboring microgrids and is treated locally as an
uncertain parameter as we will explain in more de-
tail in Section 3. Figure 1 illustrates that each mi-
crogrid only knows its local power variables and its
neighboring couplings, allowing for distributed con-
trol. According to the storage power p
st
i
, the storage
is charged or discharged and the resulting change in
the SoC s
i
is modeled as
˙s
i
= b
i
(s
i
, p
st
i
),
with some function b
i
modeling the battery dynamics,
which is described in the next section.
2.2 Nonlinear Battery Model
If a microgrid is attacked, the battery may also be used
at SoCs close to 0 or 1, which is avoided during nor-
mal operation. Therefore, the goal of this section is to
derive a nonlinear function b
i
that describes the bat-
tery dynamics for all states of charge in [0,1] and not
only in the middle range, where a linear approxima-
tion is often sufficient. With Q
i
denoting the maxi-
mum capacity of the battery and I
st
i
being the battery
current, the dynamics of the SoC are given as
˙s
i
= −
I
st
i
Q
i
, (2)
see, e.g., (Mathieu and Taylor, 2016). With U
st
i
denot-
ing the battery voltage, the storage power p
st
i
is given
as p
st
i
= U
st
i
I
st
i
and U
st
i
, in turn, can be modeled as
U
st
i
= U
OCV
i
(s
i
) + R
i
I
st
i
.
The first term describes the open circuit voltage U
OCV
i
and the second the ohmic effect with resistance R
i
,
see (Mathieu and Taylor, 2016). For the storage
power p
st
i
, this results in the following equation,
which is quadratic in I
st
i
p
st
i
= U
OCV
i
(s
i
)I
st
i
+ R
i
I
st
i
2
.
Solving it for I
st
i
, the battery current I
st
i
is obtained
from s
i
and p
st
i
via I
st
i
= β
i
(s
i
, p
st
i
) for some nonlin-
ear function β
i
. Together with eq. (2), this results
in a nonlinear function b
i
(s
i
, p
st
i
) = −β
i
(s
i
, p
st
i
)/Q
i
describing the dynamic behavior of the battery. It
remains open to specify U
OCV
i
(s
i
). Models for the
open circuit voltage of batteries are typically obtained
from electrochemical analyses and often fitted to lin-
ear curves. For low and high SoCs, however, this is
inaccurate, which is why we use the model by (Zhang
et al., 2016). With parameters A
i
,B
i
,C
i
,D
i
,M
i
, and N
i
that depend on the type of battery, their model in-
cludes a logarithmic, a linear, and an exponential
function
U
OCV
i
(s
i
) = A
i
+ B
i
(−ln(s
i
))
M
i
+C
i
s
i
+ D
i
e
N
i
(s
i
−1)
.
2.3 Attack Model
In this work, we examine attacks on microgrid con-
trol and model an attack as an additional, unknown
input like, e.g., (Ananduta et al., 2020). In micro-
grid i, we consider the possibility of attacks on the
generation input u
g
i
, on the power exchange u
m
i
with
the main grid, and on power transfers u
tr
i j
with any
neighbor j ∈ N
i
. If an attacker is present, the dynam-
ics in eq. (1) of the affected state p
i
∈ {p
g
i
, p
m
i
, p
tr
i j
}
with input u
i
∈ {u
g
i
,u
m
i
,u
tr
i j
} and delay parameter
T
i
∈ {T
g
i
,T
m
i
,T
tr
i j
} are changed to
˙p
i
=
1
T
i
(u
i
+ a
i
− p
i
), (3)
where a
i
∈ {a
g
i
,a
m
i
,a
tr
i j
} represents the modification in
the dynamics caused by the attack. In other words, in
case of an attack, not the computed controller com-
mand u
i
is applied to the system, but some altered
input u
i
+ a
i
.
This model covers not only malicious attacks, but
uncertain disturbances in general. If microgrid i in-
cludes nondispatchable generation from renewables
or uncertain load, the input a
g
i
also models the power
difference between uncertain generation and load. We
deliberately make no difference in modeling, but con-
sider both attacks and renewable generation as uncer-
tain influences, since the resilient control framework
presented in Section 3 is robust against attacks as well
as fluctuations in generation and load.
2.4 Cost Function
Each microgrid i is operated locally to meet the re-
spective load at the lowest possible cost. For a time
window [0,T ], we consider the following costs for
economic dispatch
J
i
(T ) =
Z
T
0
q
i
p
g
i
, p
tr
i
, p
st
i
+ l
i
p
flow
i
, p
m
i
dt + m
i
(s
i
(T )),
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
60

that consist of quadratic stage costs q
i
, piecewise lin-
ear stage costs l
i
, and terminal costs m
i
. The costs q
i
are defined as
q
i
p
g
i
, p
tr
i
, p
st
i
= C
g
i
p
g
i
2
+
∑
j∈N
i
C
tr
i
p
tr
i j
2
+C
st
i
p
st
i
2
with cost values C
g
i
,C
tr
i
,C
st
i
∈ R
≥0
. They describe the
per-unit costs of power generation, power transfers
to neighbors, and storage operations, and model the
costs that incur by the use of these units. The eco-
nomic profit or loss from selling or buying energy in
trade with neighbors or the main grid is modeled by
piecewise linear costs l
i
. Based on the positive and
negative part functions
(x)
+
:
=
(
0 if x < 0,
x if x ≥ 0,
and
(x)
−
=
(
x if x < 0,
0 if x ≥ 0,
the piecewise linear cost function l
i
is defined as
l
i
p
flow
i
, p
m
i
=
∑
j∈N
i
C
flow,ex
ji
p
flow
ji
−
+
∑
j∈N
i
C
flow,im
ji
p
flow
ji
+
+C
m,ex
i
(p
m
i
)
−
+C
m,im
i
(p
m
i
)
+
for each microgrid i, with export and import per-unit
prices C
flow,ex
ji
, C
flow,im
ji
, C
m,ex
i
, C
m,im
i
∈ R
≥0
, which
may fluctuate throughout the day. We will explic-
itly allow export prices to be considerably lower than
import prices since we focus on small producers, for
which in reality it is often more profitable to gener-
ate power for their own demand than to import from
the main grid. To account for degradation costs of the
battery and to avoid that only the storage is discharged
to fulfill the load, we introduce terminal costs m
i
as
m
i
(s
i
) = C
dis
i
(s
i
(0) − s
i
(T ))
+
Q
i
.
If the state of charge s
i
(T ) at the end of the consid-
ered horizon is smaller than s
i
(0) at the beginning,
each unit of power discharge is penalized by some
cost C
dis
i
∈ R
≥0
.
3 A FRAMEWORK FOR
RESILIENT CONTROL
In this section, we outline three methods for resilient
control of distributed systems under attack that have
been proposed in recently published work, see (Braun
et al., 2020; Braun et al., 2021b; Braun et al., 2021a):
First, we describe an approach for robust distributed
MPC in Section 3.1. Then, a global ADI method to
identify unknown attacks is outlined in Section 3.2,
and, finally, both methods are combined into an adap-
tively robust MPC scheme in Section 3.3 to compute
control inputs that are robust against previously iden-
tified attacks. We also propose a novel approach for
local ADI in Section 3.2. All methods are applica-
ble to distributed control systems with several subsys-
tems that behave according to discrete-time dynamics
of the form
x
k+1
i
= f
i
x
k
i
,u
k
i
+ a
k
i
,z
k
N
i
,
z
k+1
i
= h
i
(x
k+1
i
),
y
k+1
i
= g
i
(x
k+1
i
),
(4)
with local states x
k
i
, inputs u
k
i
, attacks a
k
i
, and system
outputs y
k
i
in subsystem i. The physical interconnec-
tion of subsystems is modeled through coupling vari-
ables z
k
i
, which depend on the local states. All func-
tions f
i
,h
i
, and g
i
may be nonlinear and are assumed
to be sufficiently smooth. The microgrid model from
Section 2 is of the same form as eq. (4) when we de-
fine local states
x
i
=
s
i
, p
g
i
, p
m
i
,
p
tr
i j
j∈N
i
T
,
local inputs
u
i
=
u
g
i
,u
m
i
,
u
tr
i j
j∈N
i
T
,
local attacks
a
i
=
a
g
i
,a
m
i
,
a
tr
i j
j∈N
i
T
,
and local couplings
z
i
=
p
tr
i j
j∈N
i
and z
N
i
=
p
tr
ji
j∈N
i
.
The function f
i
is obtained from the dynamics in
eq. (1) by discretizing the equations in time, while the
function g
i
depends on the desired system output and
can for example model measurement data.
3.1 Contract-based Robust Distributed
MPC
An important aspect for the control of safety-critical
systems is to compute inputs that are robust against
uncertainties by ensuring that the constraints are ful-
filled in all possible cases. To this end, (Lucia et al.,
2013) propose a multi-stage scheme for robust MPC
that assumes a discrete set of possible scenarios and
Resilient Control of Interconnected Microgrids Under Attack by Robust Nonlinear MPC
61

represents all potential future states in a scenario tree.
Taking into account that in a closed-loop approach fu-
ture inputs can be adapted when new measurements
are available, they compute control inputs that achieve
constraint satisfaction in all scenarios and minimize a
cost function weighted over all scenarios.
Robust MPC can be employed to design also dis-
tributed MPC schemes since in a distributed setting
as in eq. (4), to the eyes of subsystem i, the neigh-
boring couplings z
N
i
behave in an uncertain manner.
Since multi-stage MPC requires knowledge about the
range of possible values for each uncertain quantity,
(Lucia et al., 2015) introduce so-called contracts Z
i
,
that contain predicted reachable values of the cou-
pling variables z
i
and are exchanged among neigh-
bors. In (Braun et al., 2020), approximations of these
contracts are proposed that can efficiently be obtained
from local scenario trees and have been proven to
work well in practice.
To apply multi-stage (distributed) MPC for robust
control also against attacks, one has to provide suit-
able uncertainty sets A
i
with possible values for local
attacks a
i
. To this end, one can choose suitable sam-
ples for attack values as in (Braun et al., 2020), or in a
more general approach use available knowledge about
the attackers gained from attack identification. The
latter approach is introduced in (Braun et al., 2021a)
and summarized in Section 3.3.
3.2 Attack Identification based on
Sparse Optimization
Robust MPC schemes provide an important tool to
manage the impact of a potential attack. Neverthe-
less, when an attack occurs, it is crucial to detect and
identify it quickly to initiate appropriate countermea-
sures in order to eliminate the attacker or mitigate
its impact. To avoid the combinatorial nature that
is inherent to most identification methods relying on
unknown-input observers, one can solve a continuous
optimization problem to compute a suspected attack
from an unknown, possibly infinite dimensional and
unbounded set of potential attacks. Taking advantage
of the observation that typical attacks in practical ap-
plications target only few network components, the
optimization reveals a sparsest possible attack that ex-
plains the observed system output.
In (Braun et al., 2021b), this idea is implemented
in a global ADI method with rigorous success guaran-
tees for nonlinear networked systems. Since in a dis-
tributed setting, model information about the subsys-
tems’ dynamics is available only locally and should
remain private, a linear approximation of the dynam-
ics at the current iterate is used for identification. To
this end, each subsystem locally evaluates first-order
derivatives and makes them publicly available. Then,
a global linear optimization problem is solved to iden-
tify a sparse suspected attack.
In this paper, we propose a novel identification
problem for local attack identification, which is also
based on sparse optimization. Since no information
on local dynamics is published in this decentralized
approach, the linearization from above is no longer
necessary. Instead, each subsystem locally solves the
following nonlinear identification problem with mea-
surements
e
y
i
,
e
x
i
, and
e
z
N
i
of the output y
i
, the state x
i
,
and the neighboring couplings z
N
i
:
min
a
i
ka
i
k
1
,
s.t.
e
y
i
− g
i
◦ f
i
(
e
x
i
,u
i
+ a
i
,
e
z
N
i
)
2
≤ ε
i
,
(5)
where the ◦-operator denotes the function composi-
tion of g
i
and f
i
. A solution of problem eq. (5) locally
reveals a suspected attack, referred to as a
∗
i
, based on
which the local model in eq. (4) with functions g
i
, f
i
explains the observed output
e
y
i
up to an accuracy of
ε
i
. The choice of the tolerance ε
i
is not trivial, even
if perfect measurements were assumed, since the dis-
tributed model in eq. (4) only approximates the dy-
namic behavior of the global system. More specif-
ically, the coupling variables z
N
i
in the local mod-
els represent differential states of neighboring subsys-
tems, but their dynamic behavior is unknown to sub-
system i. In ongoing research, we investigate how dif-
ferent parametrization schemes of the coupling vari-
ables influence the resulting error between centralized
and distributed numerical integration. Based on this
error, a suitable value ε
i
can be chosen. In the numer-
ical experiments in this work, we use a fixed value,
which is given in Section 4.
3.3 Attack Mitigation using Adaptively
Robust MPC
In the previous sections, two important tools for dis-
tributed control systems under attack have been intro-
duced: For one thing, robust MPC can limit the im-
pact of a disturbance by ensuring satisfied constraints
in all scenarios, but requires information about the
uncertainty range. For another thing, attack identi-
fication provides suspicions about an attack, but is
not able to mitigate its effects. To combine the ad-
vantages of both, an adaptively robust MPC scheme
was proposed in (Braun et al., 2021a). It repeatedly
adjusts the uncertainty sets A
k
that involve possible
attacks a
k
at time k according to findings from attack
identification. The method is designed for attacks that
obey a probability distribution with unknown, time-
invariant expected value µ and standard deviation σ,
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
62

which are estimated at each time k from solutions a
∗,l
of the identification problem in earlier times l ≤ k.
The mean µ
k
and the sample standard deviation σ
k
of
all previously identified values a
∗,l
serve as estimates
for µ and σ according to
µ
k
=
1
k + 1
k
∑
l=0
a
∗,l
and
σ
k
=
1
k
k
∑
l=0
a
∗,l
− µ
k
2
!
1
2
.
The uncertainty of possible attacks a
k
is now repre-
sented by three scenarios for each component a
k
i
A
k
i
=
n
µ
k
i
,µ
k
i
+ σ
k
i
,µ
k
i
− σ
k
i
o
. (6)
The total amount of scenarios considered in the multi-
stage control scheme results from the product of all
uncertainty sets A
k
i
for each identified component a
k
i
.
The interplay of all methods presented in Section 3 is
summarized in Algorithm 1.
Algorithm 1: A resilient control framework.
Input: Initial contracts Z
0
i
∀i, e.g., Z
0
i
= {h
i
(x
i
(0))}
1: Set A
0
i
:
= {} ∀i
2: for time step k and microgrid i do
3: Set up local multi-stage problem and compute
input u
k
i
, robust against Z
k−1
N
i
and A
k−1
i
4: Derive new contract Z
k
i
and transmit to all
neighbors j ∈ N
i
5: Local ADI: Solve problem (5) to obtain a sus-
picion a
∗,k
i
6: Locally adapt uncertainty set A
k
i
as in eq. (6)
7: end for
4 NUMERICAL EXPERIMENTS
In this section, we perform a numerical case study to
analyze how economic dispatch for microgrids can
be achieved at minimum cost despite possible dis-
turbances, using the methods from Section 3. We
consider three microgrids with renewable generation
that may be exposed to attacks, each connected to the
other microgrids and the main grid as in Figure 1. Ac-
cording to Section 2, each microgrid i ∈ {1,2,3} is
modeled by five states s
i
, p
g
i
, p
m
i
, p
tr
i j
and four control
inputs u
g
i
,u
m
i
,u
tr
i j
for j ∈ {1,2,3} \ {i}. For all vari-
ables v
i
∈
n
s
i
, p
g
i
, p
m
i
, p
tr
i j
,u
g
i
,u
m
i
,u
tr
i j
o
, the initial val-
ues v
i
(0) and lower and upper bounds v
i
and v
i
are
Table 1: This table lists all model and cost parameters, vari-
able bounds, and initial values that are used in all experi-
ments presented in this work.
Parameters Values Unit
T
g
i
, T
m
i
, T
tr
i j
∀i, j 0.1, 0.001, 0.001 h
Q
1
,Q
2
,Q
3
100, 200, 100 kAh
R
1
,R
2
,R
3
1.5, 2.0, 3.0 mΩ
A
i
,B
i
∀i 2.23, -0.001 V
C
i
,D
i
∀i -0.35, 0.6851 V
M
i
,N
i
∀i
3.0, 1.6 -
C
g
1
,C
g
2
,C
g
3
0.2, 3.0, 2.0 -
C
tr
i
,C
st
i
,C
dis
i
∀i
4.0, 1.0, 2000 -
C
flow,im
i j
,C
flow,ex
i j
∀i, j 4.0, 0.04 -
s
i
, p
g
i
, p
m
i
, p
tr
i j
∀i, j 0, 0, -1000, -100 -, kW
s
i
, p
g
i
, p
m
i
, p
tr
i j
∀i, j 1, 1000, 2000, 100 -, kW
u
g
i
,u
m
i
,u
tr
i j
∀i, j 0, -1000, -100 kW
u
g
i
,u
m
i
,u
tr
i j
∀i, j 1000, 2000, 100 kW
s
1
(0),s
2
(0),s
3
(0) 0.9, 0.5, 0.6 -
p
g
i
(0), p
m
i
(0) ∀i 0.0, 0.0 kW
p
tr
i j
(0) ∀i, j 0.0 kW
p
l
i
∀i -2.0 kW
given in Table 1, which also contains the values of
all model parameters as in Section 2. The param-
eters A
i
,B
i
,C
i
,D
i
,M
i
, and N
i
in the model for open
circuit voltage by (Zhang et al., 2016) are chosen fol-
lowing their suggestion for LTO-batteries. During a
time window of two days, each microgrid locally ap-
plies MPC with step size 0.25h. At time t ∈ [0, 48] h,
the local cost function J
i
considers the time win-
dow [t,t + N
p
] with prediction horizon N
p
= 6 h and is
designed as in Section 2.4 with cost parameters from
Table 1. The values C
m,im
i
and C
m,ex
i
, that describe the
cost or revenue of power imports from or exports to
the main grid, vary in the course of the day. For all
microgrids i, we use the following fictitious values,
which reflect typical market fluctuations with rising
prices in the morning and evening hours, based on real
prices by (Bundesnetzagentur Deutschland, 2021):
C
m,im
i
(t) =
275 if t % 24 h ∈ [15,20)h,
200 if t % 24 h ∈ [6,9) ∪ [20,22)h,
150 if t % 24 h ∈ [9,15) ∪ [22,24)h,
100 otherwise,
C
m,ex
i
(t) =
15 if t % 24 h ∈ [15,20)h,
10 if t % 24 h ∈ [6,9) ∪ [20,22)h,
0 otherwise.
Resilient Control of Interconnected Microgrids Under Attack by Robust Nonlinear MPC
63
Here, % denotes the modulo operator and t %24h
indicates the time of day. One possible strategy
to maximize revenue is to store energy at times of
low prices for later export. Toward a resilient op-
eration, the system is controlled using the adap-
tively robust distributed MPC scheme described in
Algorithm 1. Based on the local control problems,
each microgrid computes contracts Z
k
i
for its cou-
pling variables z
i
=
p
tr
i j
j∈N
i
at each time k and
shares them with its neighbors. To locally identify
the unknown attack, a nonlinear optimization prob-
lem of the form (5) is solved at each sampling time
to an accuracy of ε
i
= 10
−3
. Only partial observ-
ability of the states x
i
=
s
i
, p
g
i
, p
m
i
, p
tr
i j
, p
tr
ik
T
with
g
i
(x
i
) = diag(1, 1, 1, 0, 0)x
i
is assumed. That means,
for each microgrid i the outputs y
i
= (s
i
, p
g
i
, p
m
i
)
T
are
considered by the local identification process, but not
the transfer variables p
tr
i j
, p
tr
ik
. Based on the suspected
attacks a
∗,k
i
, we approximate the uncertainty sets A
k
i
as in eq. (6). The local control problems are repeat-
edly adapted to new contracts and identification re-
sults that become available in course of time. As a
consequence, the computed inputs at time k + 1 are
robust toward neighboring couplings in Z
k
N
i
and iden-
tified attacks in A
k
i
. For comparison, we repeat each
experiment with non-robust distributed MPC, where
neither contracts are exchanged nor attack identifica-
tion is considered.
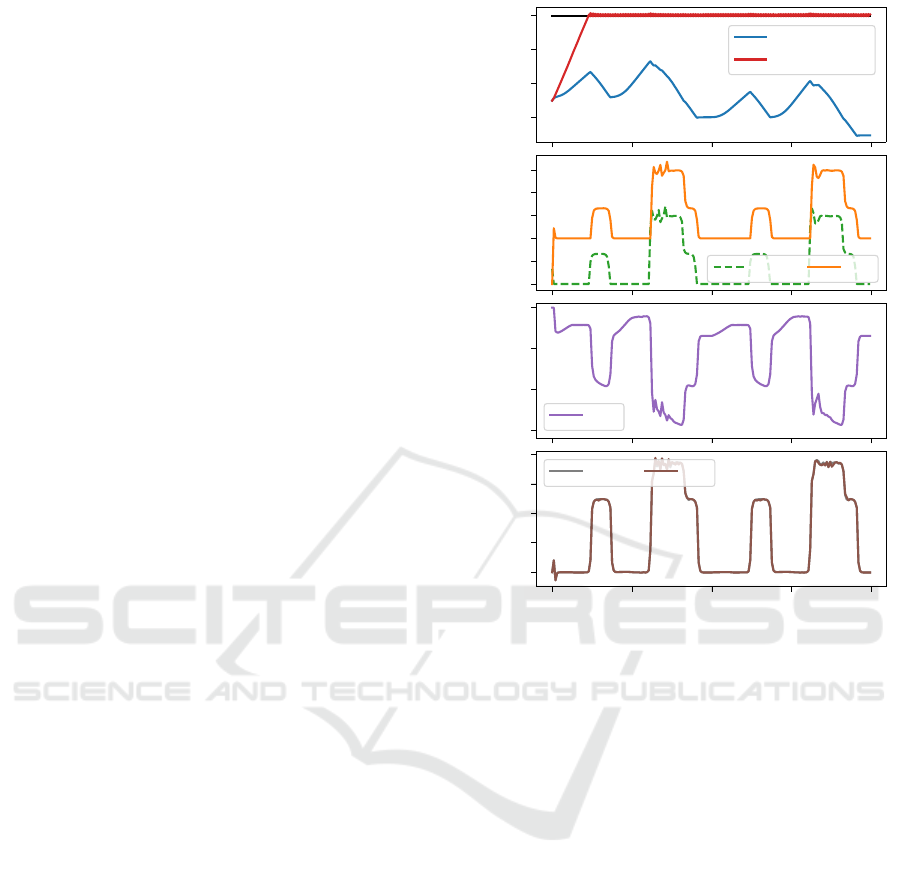
We examine the behavior of the system in two
attack scenarios, each with adaptively robust versus
non-robust control. First, we assume that all genera-
tion units are dispatchable and an attack a
g
1
= 10 kW
disturbs the generator dynamics in microgrid 1 as in
eq. (3). Later we will also consider uncertain re-
newable generation. The attack is present over the
entire time window [0,48]h and causes the gener-
ated power p
g
1
in the attacked microgrid to deviate
strongly from the control input u
g
1
, see Figure 2. The
local ADI method successfully identifies the attack
in every time step, computing suspected attack val-
ues a
g,∗
1
≈ 9.9989, which allows the adaptively robust
MPC scheme to adjust its prediction. As a result, the
control inputs are adapted and the microgrid makes
use of the additionally generated power by storing it
into the battery and exporting it to the main grid dur-
ing times with high profit. In contrast, in the solution
computed with non-robust MPC, the battery reaches
and violates its maximum state of charge of 1 af-
ter about 5 h, see Figure 2. This is because due to
the attack, more power than planned is generated and
charged into the storage to maintain power balance.
Since SoC values larger than 1 are invalid, the next
State of chargeGenerated powerImp./exp. powerTransferred power
1.00
0.96
0.92
0.88
25
20
15
10
5
0
0
-10
-20
-30
2.0
1.5
1.0
0.5
0.0
s
1
robust
s
1
non-robust
u
g
1
p
g
1
p
m
1
p
tr
12
p
tr
13
Time in hours
0 12 24 36 48
Figure 2: Selected state and input trajectories for micro-
grid 1 that is exposed to a generator attack, all powers
in kW. The different SoC trajectories, computed by adap-
tively robust versus non-robust MPC, show the benefit of
the proposed resilient control framework.
MPC step starts with s
1
= 1, but as the attack is not
identified, the full battery continues to be charged, re-
sulting in bound violations in 171 of 192 steps.
It should be mentioned that power balance can
be ensured in other ways than using the storage as
a buffer. If power exchange with the main grid
is allowed at all times, using the main grid as a
buffer would not cause bound violations like the
above. However, this may result in very high costs
if, for instance, power has to be imported at ex-
pensive prices in the evening. The battery, on the
other hand, allows to store power until exports to the
main grid become profitable. Indeed, over the en-
tire time window, robust MPC achieves total costs
of −5.2 · 10
3
, thus making profit despite the attack,
while non-robust MPC yields total costs of 2.3 · 10
4
,
being orders of magnitudes larger.
In the second experiment, we modify the genera-
tor attack to a
g
1
= 10 kW + r
g
1
with renewable gener-
ation r
g
1
∼ N (0,8)kW, randomly drawn from a nor-
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
64
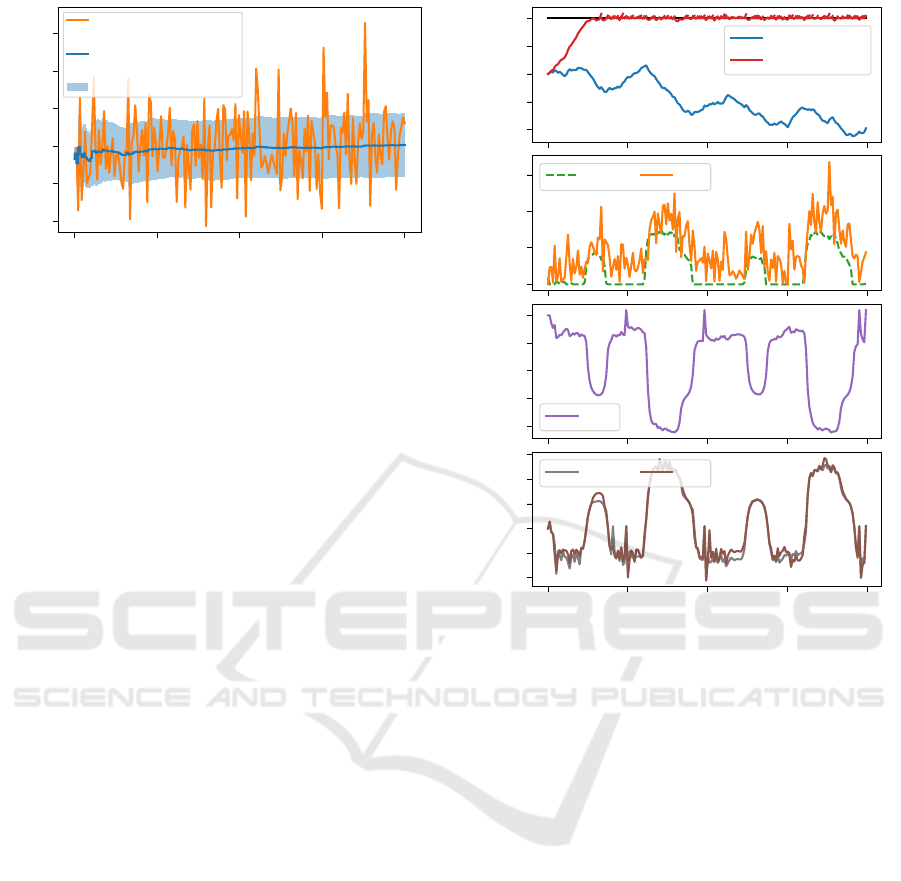
Actual attack a
g
1
Identified mean µ
k
1
Sample std. dev. σ
k
1
Time in hours
0 12 24 36 48
Disturbance a
g
1
in kW
40
30
20
10
0
-10
Figure 3: Course of the mean µ
k
1
of identified values a
∗,k
1
over time, with sample standard deviation σ
k
1
. The actual
disturbance a
g,k
1
at each time k is shown in orange.
mal distribution with mean 0 kW and standard devi-
ation 8 kW, independently at each time. Attack and
renewable generation together may cause more gen-
erated power than planned (if a
g
1
> 0) or less (a
g
1
< 0),
but are chosen such that the total input u
g
1
+ a
g
1
is
nonnegative. Due to the continually changing values
for a
g
1
, the ADI method identifies different values a
∗,k
1
at each time step, but as Figure 3 shows, the mean
value µ
k
1
quickly settles at around 10 kW. Due to the
fluctuating uncertainty, the three scenarios in multi-
stage MPC are further apart than in the first experi-
ment. Adaptively robust MPC computes a solution,
shown in Figure 4, with total costs of 3.1 · 10
3
that
is admissible for all scenarios, using the storage as a
buffer to cope with the uncertainty. The non-robust
approach again proves to be unsuitable to control the
disturbed system as it computes a solution that vio-
lates state bounds in 113 steps and causes more than
ten times higher total costs of 3.2 · 10
4
.
5 CONCLUSION AND OUTLOOK
We introduced a distributed model for microgrids that
are interconnected by dispatchable power transfers
and influence neighboring systems through coupling
variables. The model considers possible disturbances
in the form of input attacks or uncertain renewable
generation. We applied a previously presented re-
silient control framework, combining multi-stage ro-
bust MPC with optimization-based methods to iden-
tify unknown attacks. It is designed for distributed
systems, where each component has (only) access to a
local dynamic model and transmits information about
predicted coupling values to its neighbors. In numer-
ical experiments, the method has proven to be suit-
able for microgrids under attack, even if renewables
State of chargeGenerated powerImp./exp. powerTransferred power
1.00
0.95
0.90
0.85
0.80
60
40
20
0
0
-10
-20
-30
-40
1.5
1.0
0.5
0.0
-0.5
-1.0
s
1
robust
s
1
non-robust
u
g
1
p
g
1
p
m
1
p
tr
12
p
tr
13
Time in hours
0 12 24 36 48
Figure 4: States and inputs in microgrid 1, which now con-
tains renewable generation as another source of uncertainty
in addition to the generator attack.
cause additional uncertainty. We plan to extend ex-
isting ADI methods toward distributed identification
schemes, where the exchange of suitable information
allows microgrids to identify not only local distur-
bances, but even attacks on neighboring microgrids.
ACKNOWLEDGEMENTS
This work was supported by the German Federal
Ministry of Education and Research (BMBF) via the
funded research project AlgoRes (01S18066B).
REFERENCES
Ananduta, W., Maestre, J., Ocampo-Martinez, C., and Ishii,
H. (2020). Resilient distributed model predictive con-
trol for energy management of interconnected micro-
grids. Optimal Control Applications and Methods,
41:146–169.
Arauz, T., Chanfreut, P., and Maestre, J. (2021). Cyber-
Resilient Control of Interconnected Microgrids Under Attack by Robust Nonlinear MPC
65

security in networked and distributed model predictive
control. Annual Reviews in Control.
Braun, S., Albrecht, S., and Lucia, S. (2020). Hierarchical
attack identification for distributed robust nonlinear
control. In 21st IFAC World Congress, pages 6191–
6198.
Braun, S., Albrecht, S., and Lucia, S. (2021a). Adaptively
robust nonlinear model predictive control based on at-
tack identification. Accepted for publication in at-
Automatisierungstechnik, preprint at https://tu-dortm
und.sciebo.de/s/w8IPet5jfxJaEaW.
Braun, S., Albrecht, S., and Lucia, S. (2021b). Attack iden-
tification for nonlinear systems based on sparse opti-
mization. IEEE Transactions on Automatic Control.
early access.
Bundesnetzagentur Deutschland (2021). SMARD Strom-
marktdaten for Germany in November 2021. https:
//www.smard.de/home/downloadcenter/download-
marktdaten. Online, last accessed: November 18
th
,
2021.
Gallo, A., Turan, M., Boem, F., Parisini, T., and Ferrari-
Trecate, G. (2020). A distributed cyber-attack detec-
tion scheme with application to DC microgrids. IEEE
Transactions on Automatic Control, pages 3800–
3815.
Giraldo, J., Urbina, D., Cardenas, A., Valente, J., Faisal, M.,
Ruths, J., Tippenhauer, N., Sandberg, H., and Candell,
R. (2018). A survey of physics-based attack detection
in cyber-physical systems. ACM Computing Surveys,
51:76:1–76:36.
Lucia, S., Finkler, T., and Engell, S. (2013). Multi-stage
nonlinear model predictive control applied to a semi-
batch polymerization reactor under uncertainty. Jour-
nal of Process Control, 23:1306–1319.
Lucia, S., K
¨
ogel, M., and Findeisen, R. (2015). Contract-
based predictive control of distributed systems with
plug and play capabilities. IFAC-PapersOnLine,
48:205–211.
Mathieu, J. and Taylor, J. (2016). Controlling nonlinear
batteries for power systems: Trading off performance
and battery life. In IEEE Power Systems Computation
Conference, pages 1–7.
Mayne, D., Seron, M., and Rakovi
´
c, S. (2005). Robust
model predictive control of constrained linear systems
with bounded disturbances. Automatica, 41:219–224.
Mohammed, A., Refaat, S., Bayhan, S., and Abu-Rub, H.
(2019). AC microgrid control and management strate-
gies: evaluation and review. IEEE Power Electronics
Magazine, 6:18–31.
Olivares, D., Mehrizi-Sani, A., Etemadi, A., Ca
˜
nizares, C.,
Iravani, R., et al. (2014). Trends in microgrid control.
IEEE Transactions on Smart Grid, 5:1905–1919.
Pan, W., Yuan, Y., Sandberg, H., Gonc¸alves, J., and Stan,
G. (2015). Online fault diagnosis for nonlinear power
systems. Automatica, 55:27–36.
Pasqualetti, F., D
¨
orfler, F., and Bullo, F. (2013). Attack
detection and identification in cyber-physical systems.
IEEE Transactions on Automatic Control, 58:2715–
2729.
Wang, Y. and Ishii, H. (2019). A distributed model pre-
dictive scheme for resilient consensus with input con-
straints. In IEEE Conference on Control Technology
and Applications, pages 349–354.
Zhang, C., Jiang, J., Zhang, L., Liu, S., Wang, L., and
Loh, P. (2016). A generalized SOC-OCV model for
lithium-ion batteries and the SOC estimation for LN-
MCO battery. Energies, 9:900:1–900:16.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
66
