
Reconfigurable Wireless Sensor Networks Simulator (RWSNSim):
A New Discrete-event Simulator
Hanene Rouainia
1 a
, Hanen Grichi
2,3 b
, Laid Kahloul
4 c
and Mohamed Khalgui
3,5,∗ d
1
Faculty of Sciences of Tunis, El-Manar University, Tunis, Tunisia
2
Faculty of Sciences of Bizerte (FSB), University of Carthage, Bizerte, Tunisia
3
School of Electrical and Information Engineering, Jinan University, Zhuhai, China
4
LINFI Laboratory, Computer Science Department, Biskra University, Biskra, Algeria
5
INSAT Institute, University of Carthage, Tunis, Tunisia
Keywords:
Wireless Sensor Network, Reconfigurable Wireless Sensor Network, RWSNSim, Simulator, Sensor Node,
Sink Node, Agent.
Abstract:
Reconfigurable wireless sensor networks become an important area in research and industrial communities.
With their development and spread, many problems and solutions have emerged. Network simulators have
become an essential necessity to study the impact of these solutions on networks in order to avoid huge costs
in terms of money, time, and effort if applied on the ground. In this paper, we propose a new discrete-
event simulator for WSNs and RWSNs called RWSNSim. We present its description, modeling, and provided
services. Finally, to demonstrate the efficiency of RWSNSim, we simulate a case study and detail the simulator
functioning steps.
1 INTRODUCTION
With the spread of microelectromechanical sys-
tems (MEMS) technology, wireless sensor networks
(WSNs) have gained worldwide attention. WSNs de-
ploy a set of multi-functional devices known as sensor
nodes (SNs). They have considerable characteristics
such as small size, low cost and computing resources,
and limited processing. Sensor nodes can sense both
physical and chemical measurements in the surround-
ing environment to process the sensing data, com-
municate with each other wirelessly, and work co-
operatively (Agrawal, 2017), (Rouainia et al., 2022).
WSNs can be used in a variety of areas like medical,
environmental monitoring, military, and smart homes
(Khriji et al., 2018), (Vijayalakshmi and Muruganand,
2018).
We have several challenges in WSNs like lack
of energy problem which occurs because the WSNs
work under many types of renewable energy re-
sources which are not frequently available, real-time
a
https://orcid.org/0000-0001-7544-988X
b
https://orcid.org/0000-0002-4601-3574
c
https://orcid.org/0000-0002-9739-7715
d
https://orcid.org/0000-0001-6311-3588
∗
Member IEEE
problem which means that in some applications, the
transmitted messages over the network must respect
their deadlines, and packet dropping which may be
caused by software or hardware failures as men-
tionned by several researchers in literature (Rouainia
et al., 2020), (Rouainia et al., 2022), (Hafidi et al.,
2020).
Reconfigurable wireless sensor networks
(RWSNs) are wireless sensor networks with the
possibility to execute reconfiguration scenarios such
as mobility and resizing. The existence of additional
specific devices (i.e., mobile sensor nodes, mobile
sink nodes, and software and hardware agents) allows
RWSNs to execute reconfiguration scenarios. These
reconfiguration scenarios are proposed as solutions to
the mentioned WSNs problems in our previous works
(Rouainia et al., 2020), (Rouainia et al., 2022).
Since the expensive cost, effort, time, and com-
plexity implicated in the construction and the imple-
mentation of RWSNs, the developers prefer to get an
overview about feasibility and behaviour of RWSNs
before hardware implementation. Indeed, the anal-
ysis and evaluation of the proposed solutions and
techniques through real experiments are not feasible,
complex, and very expensive in terms of time, effort,
and cost. As result, to keep up with these challenges,
Rouainia, H., Grichi, H., Kahloul, L. and Khalgui, M.
Reconfigurable Wireless Sensor Networks Simulator (RWSNSim): A New Discrete-event Simulator.
DOI: 10.5220/0011318300003266
In Proceedings of the 17th International Conference on Software Technologies (ICSOFT 2022), pages 349-361
ISBN: 978-989-758-588-3; ISSN: 2184-2833
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
349

several simulation tools (Nayyar and Singh, 2015) are
proposed to test and analyse the performance of the
proposed techniques, protocols, and solutions. They
have many advantages like low cost, easy develop-
ment, giving real-time results, and detecting the posi-
tive and negative effects on the entire network.
There are two types of simulations surround-
ing WSNs and RWSNs: trace-driven simulation and
discrete-event simulation. Trace-driven simulation is
an important approach in many simulation applica-
tions, especially in real-time applications. It enables
fast design evaluation by considering system models
which are derived from a sequence of observations
made on a real system. It allows users to get in-depth
details of the simulation model. But it contains sev-
eral drawbacks like increasing the complexity of the
simulation. On the other hand, discrete-event simu-
lation is used to model real-world systems that can
be divided into several logically separate processes
that autonomously progress through time. This type
of simulation is mostly used in WSNs and RWSNs
due to its ease in simulating various tasks running on
different sensor nodes, sinks, and agents (Nayyar and
Singh, 2015), (Rouainia et al., 2022).
We can evaluate and compare the simulators of
WSNs and RWSNs using a set of parameters includ-
ing the following: the type of simulator which is clas-
sified into three categories: generic, code level, and
firmware simulator, the license which can be commer-
cial or open-source, the platform which is the operat-
ing system on which the simulator operates such as
Windows, Linux, or both, and WSN platforms which
are defined in terms of sensors types and platforms
which can be simulated by the simulator (Nayyar and
Singh, 2015).
In this paper, we propose a new simulator
RWSNSim to construct WSNs and RWSNs, save them
in a database, use two routing protocol (LEACH
and WBM-TEEN), plot the simulation graph, present
an execution report for each monitoring time, draw
the resulting line charts after the simulation, and
compare between the different networks and simu-
lations (RWSNSim, 2022). It permits also to apply
the methodology proposed in (Rouainia et al., 2022)
which is a new energy efficient and fault tolerant
methodology based on a multi-agent architecture in
RWSNs using mobile sink nodes, mobility, resizing,
and test packet technique. The proposed simulator is
considered as a discrete-event simulator.
The rest of the paper is organized as follows. Sec-
tion 2 presents the related works. The new simulator
is developed in Section 3. Section 4 exposes a case
study executed by RWSNSim. Finally, the conclusion
is drawn in Section 5.
2 RELATED WORKS
Several WSNs simulation tools have been proposed
by academic and commercial communities (Nayyar
and Singh, 2015), (Rajan et al., 2015). In this section,
we will discuss some of the most important work in
this field.
RWiN-Environment (RWiN, 2016) is a graphical
tool developed to evaluate the services of the RWiN-
Methodology which is proposed to analyse, construct,
develop, and verify an RWSN system in order to re-
duce the consumed energy by the network (Grichi
et al., 2016a), (Grichi et al., 2016b).
Network Simulator-3 (NS-3) (NS3, 2022) is a
discrete-event simulator for Internet systems. It was
launched in June 2008 as an open-source project.
It is free, targeted primarily at research and educa-
tional uses, licensed under the GNU GPLv2 license,
and maintained by a worldwide community. Net-
work Simulator-3 is written in C++ language and
python. The simulations executed in NS-3 can be im-
plemented using pure C++ with optional python bind-
ings. It can work in various operating system plat-
forms like Linux and Windows via Cygwin. The lat-
est version of NS-3 is NS-3.35 which is released in
October 1, 2021. It provides several improvements
compared to previous versions like IPv6 support for
NixVectorRouting and a group mobility helper.
OMNet++ (OMNeTPP, 2019) is a powerful
object-oriented discrete-event simulator. It can be
used for the simulation of computer networks, dis-
tributed and parallel systems, modeling of multipro-
cessors, and performance evaluation of complex soft-
ware systems. It was launched in September 1997
and has a large number of users in academic, ed-
ucational, and research-oriented commercial institu-
tions. Indeed, OMNeT++ is not a simulator, but
it permits writing simulation scenarios using several
frameworks and tools. It is considered as an extensi-
ble, modular, and component-based open-architecture
simulation framework implemented using C++ pro-
gramming language. It provides an extensive graph-
ical user interface (GUI) and intelligence support.
OMNET++ distributions are available for different
operating systems like Windows, Linux, and MAC
OS X. The latest version of OMNeT++ is 5.7 which
is released in October 6, 2021 and is intended to be
the last release of the 5.x series.
JavaSim (J-Sim) simulator (JSim, 2022) is
an object-oriented simulation package based upon
C++SIM started in year 1997. It is considered as a
general purpose simulator used by many commercial
and academic organizations. J-Sim is a platform open
source, free, extensible, neutral, and reusable because
ICSOFT 2022 - 17th International Conference on Software Technologies
350

Table 1: Comparison of some simulation tools.
Name Type Program. License GUI Scalability Portability Designed for
Language (WSNs or
RWSNs)
RWiN- Discrete Java Open Excellent Medium Yes RWSNs
Environment event source
NS-3 Discrete C++, Open Limited Large Yes WSNs
event Python source
OMNet++ Discrete C++ Open Excellent Large Yes WSNs
event source
JavaSim Discrete Java Open Medium Medium Yes WSNs
event source
GloMoSiM Discrete C Open Limited Large Yes WSNs
event source
RWSNSim Discrete Java Open Excellent Medium Yes WSNs, RWSNs
event source
it has been developed using Java, based on ACA
(Autonomous Component Architecture), and offers
discrete-event process-based simulation. The use of
a script interface in J-Sim permits executing several
script-based languages such as Python and Perl. The
current version of JavaSim is 2.2.0 GA which is re-
leased in January 4, 2020. J-Sim offers a framework
for WSN simulation using INET, ACA, and Wireless
Protocol stack.
Global Mobile Information System Simulator
(GloMoSiM) (GloMoSim, 2020) is a discrete-event
scalable simulation software used for large-scale
wireless and wired network systems and developed
by Parallel Computing Lab at UCLA. It is designed
solely for wireless networks using parallel discrete-
event simulation provided by Parsec. It compiles the
simulation of protocols using Parsec compiler. Glo-
MoSiM supports three communication protocols: tra-
ditional Internet protocols, multi-hop wireless com-
munication, and direct satellite communication. It
permits to simulate networks with thousands of het-
erogeneous nodes and communication links.
Finally, the proposed simulator RWSNSim
(RWSNSim, 2022) is considered as the first simula-
tion tool designed for both WSNs and RWSNs. Table
1 presents a comparison of the mentioned simulation
tools according to general parameters.
Through table 1, we conclude that the strengths of
RWSNSim are summarized in the following: license,
graphical user interface (GUI), portability and its abil-
ity to simulate both WSNs and RWSNs.
3 RWSNSim: RECONFIGURABLE
WIRELESS SENSOR
NETWORKS SIMULATOR
In this section, we describe the RWSNSim simulator
and present its provided services. We also model the
architecture of WSNs and RWSNs using class dia-
grams and validate them. Furthermore, we model the
used databases to store the information of WSNs and
RWSNs using entity relationship diagrams.
3.1 Description
RWSNSim is a descrete-event network simulator writ-
ten in Java. It is developed using Java for wireless
sensor networks and reconfigurable wireless sensor
networks. It is an open source, free, reusable and
extensible simulator. It is designed for research and
educational use. RWSNSim is capable of simulating
networks that contain hundreds of sensor nodes, sink
nodes, and zone agents. It supports several operating
systems such as Windows and UNIX.
The proposed simulator is a desktop simulator that
makes it possible to construct WSNs and RWSNs and
simulate them using two routing protocols (LEACH
and WBM-TEEN). It can also apply the proposed
methodology in (Rouainia et al., 2022) which is a
new energy efficient and fault tolerant methodology
in RWSNs. This methodology based on a multi-agent
architecture and consists of the implementation of a
set of techniques such as the use of mobile sink nodes,
mobility, resizing of zones, and test packet technique.
RWSNSim provides several services during the
simulation process, including the following:
Reconfigurable Wireless Sensor Networks Simulator (RWSNSim): A New Discrete-event Simulator
351

• Creating WSNs and RWSNs and saving them in a
database using Java, MySQL or hsqldb according
to the user choice.
• Providing two routing protocols: LEACH and
WBM-TEEN which are considered as energy ef-
ficient protocols.
• Executing the simulation graph of each network
using jgraph, jgraphx, and jgrapht libraries.
• Displaying the execution report for each monitor-
ing time.
• Extracting the simulation results and represent-
ing them in form of line charts using jfreechart
library.
• Comparing the different networks and simula-
tions.
3.2 WSNs and RWSNs Modeling
In the following, we describe the target sensor net-
works used by RWSNSim simulator. Then, we present
the architecture of WSNs and RWSNs with their com-
ponents and relations between them using class dia-
grams which are used to develop the RWSNSim sim-
ulator. We also validate the used class diagrams by
a natural language and with ROCL constraints. This
last one is an extension of OCL which improves the
specification and validation of constraints related to
different execution scenarios of systems (Grichi et al.,
2015).
3.2.1 The Target Sensor Networks
(a) Wireless Sensor Networks (WSNs):
With RWSNSim, each wireless sensor network
composed of:
• A base station BS plays the role of a gateway
between the WSN and its administrator. It re-
ceives the sensing data from the gateways and
analyses them, which allows the administrator
of the network to take an overview of the net-
work and to call human intervention in some
cases.
• A set of zones.
• Each zone contains a gateway that collects the
sensing data from the cluster heads and sends
them to the base station.
• Each zone contains a set of clusters.
• Each cluster contains a cluster head that col-
lects the sensing data from its cluster sensor
nodes and sends them to its zone gateway.
• Each cluster contains a set of sensor nodes that
monitor the chemical and physical measure-
ments in the surrounding environment and send
them to their cluster head.
(b) Reconfigurable Wireless Sensor Networks
(RWSNs):
With RWSNSim, each reconfigurable wireless sen-
sor network composed of:
• A base station BS plays the role of a gateway
between the RWSN and its administrator. It
receives alert messages from the zone agents,
analyses them and communicates with the ad-
ministrator of the network to call human inter-
vention in some cases.
• A controller agent Ag
Ctrl
controls the whole
network by executing several tasks such as re-
ceiving the sensing data from the zone agents,
analysing them, sending alert messages to the
BS, and applying the resizing of zones.
• A set of zones.
• Each zone contains a zone agent which controls
the zone by executing several tasks such as or-
ganizing the sensor nodes in subzones into clus-
ters, applying the mobility, and detecting the
malfunctioning sink nodes.
• Each zone contains a set of subzones.
• Each subzone contains a mobile sink node that
executes several tasks like collecting the sens-
ing data from the cluster heads in the subzone,
sending them to the zone agent, and detecting
the malfunctioning sensor nodes. Each mobile
sink node is controlled by a software agent in-
stalled in the sink itself named sink agent.
• Each subzone contains a set of clusters.
• Each cluster contains a cluster head that col-
lects the sensing data from the sensor nodes in
the cluster and sends them to the sink node.
• Each cluster contains a set of sensor nodes that
monitor the chemical and physical measure-
ments in the surrounding environment and send
them to their cluster head. Each sensor node is
controlled by a software agent installed in the
sensor node itself named node agent.
3.2.2 Class Diagrams
Figure 1 presents the class diagram of wireless sensor
networks which is used to develop RWSNSim. In this
class diagram, we have 11 classes of which we define
the following:
• WSN: It models a WSN and contains the differ-
ent thresholds, constants, and consumption val-
ues. They can be used by the different entities
ICSOFT 2022 - 17th International Conference on Software Technologies
352
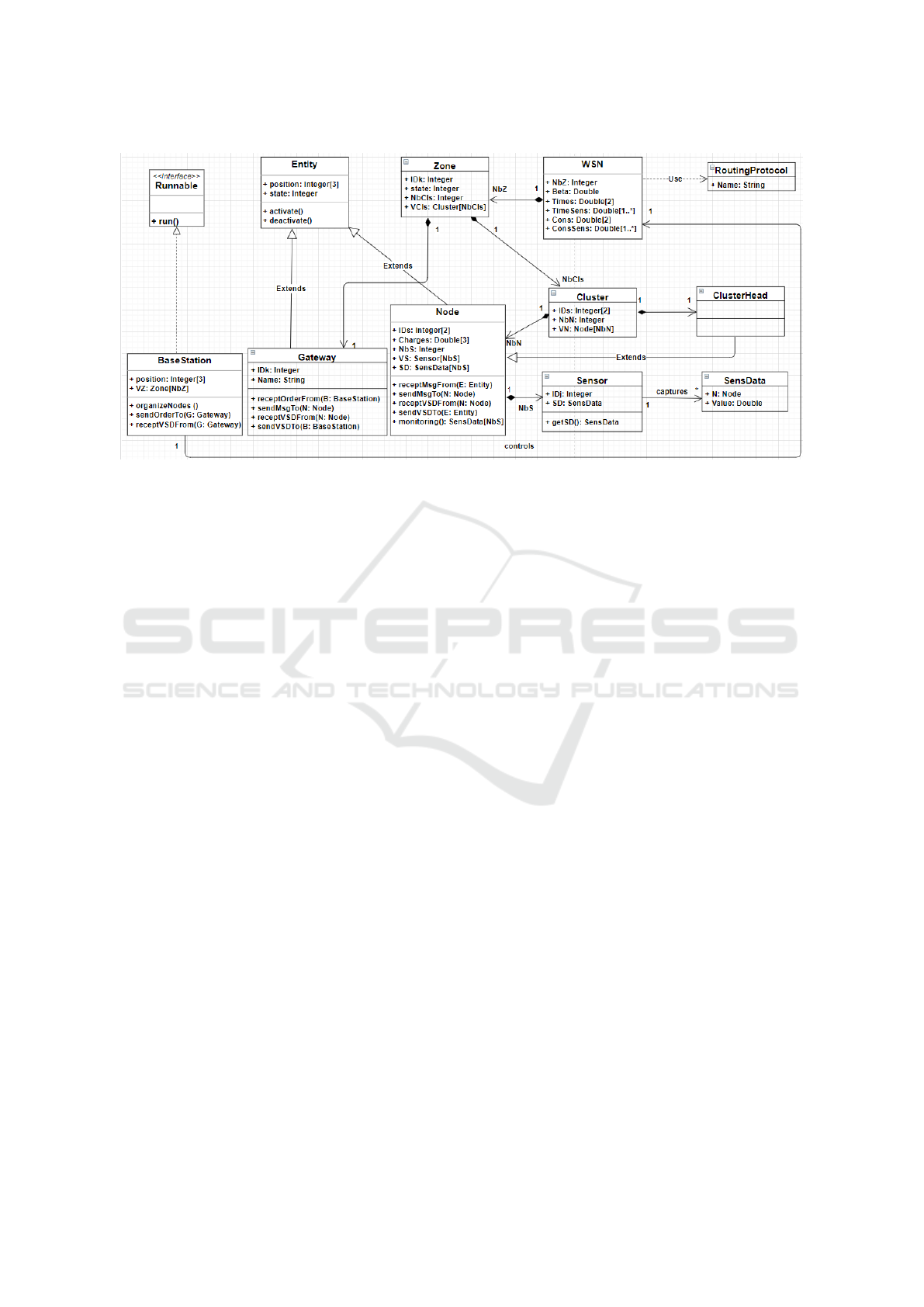
Figure 1: WSN class diagram.
in WSNs such as an energy threshold [Beta], and
vectors of consumed values of energy and time
parameters [Times, TimeSens, Cons, ConsSens].
• BaseStation: it models the base station BS. It con-
tains the BS principal properties such as its po-
sition [position], vector of zones [VZ] and oper-
ations like organizing the nodes in each zone Z
k
[organizeNodes()], sending an order to a gateway
G
k
[sendOrderTo(G: Gateway)].
• Zone: it models each zone Z
k
and contains its
principal properties such as an identifiant [IDk],
its state [state], and a vector of clusters [VCls].
• Gateway: it models each gateway G
k
and contains
its principal properties like an identifiant [IDk]
and a name [Name] and operations such as receiv-
ing an order from BS to collect the sensing data
[receptOrderFrom(B: BaseStation)] and sending
a vector of sensing data to BS [sendVSDTo(B:
BaseStation)].
• Cluster: it models each cluster in Z
k
. It contains
the clusters’ principal properties like identifiants
[IDs] and a vector of sensor nodes belonging to
this cluster [VN].
• Node: it models each sensor node N
i,k
in WSN. It
extends from the Entity class and contains the sen-
sor nodes’ principal properties such as identifiants
[IDs], a vector of batteries charges [Charges], and
a vector of sensors [VS] and operations like mon-
itoring physical or chemical measurements in the
environment [monitoring(): SensData[NbS]] and
sending a vector of sensing data to the successor
[sendVSDTo(VSD: SensData, E: Entity)].
Figure 2 presents the class diagram of reconfigurable
wireless sensor networks which is used to develop
RWSNSim. In this class diagram, we have 17 classes
of which we define the following:
• RWSN: it models a reconfigurable wireless sen-
sor network. It contains the different constants,
variables, energy and time consumption values.
They can be used by the different entities in
RWSNs such as (number of zones [NbZ] and vec-
tors of thresholds and consumed values of energy
and time parameters [Thresholds, SensThr, Cons,
ConsSens]).
• Entity: is the class model of all physical entities in
RWSNs. It contains their common properties like
the state of the entity [state] and its position [po-
sition] and operations such as activating the entity
[activate()] and deactivating it [deactivate()].
• AgCtrl: it models the controller agent Ag
Ctrl
. It
extends from the Entity class and contains the
Ag
Ctrl
principal properties like a vector of zones
[VZ] and a vector of sensing data [VSD] and op-
erations such as applying the resizing task [re-
sizing(Za: Zone, Zb: Zone)], sending an order
to a zone agent [sendOrderTo(Ag: ZoneAgent)],
sending a test packet to zone agents to detect
the malfunctioning zone agent [sendTstPckTo(Ag:
ZoneAgent)], and isolate a malfunctioning zone
agent [isolate(Ag: ZoneAgent)].
• ZoneAgent: it models each zone agent Ag
k
in
RWSN. It extends from the Entity class and con-
tains the zone agents’ principal properties like an
identifiant [IDk], a vector of sensor nodes [VN],
and a vector of subzones [VSZ] and operations
such as organizing the sensor nodes in Z
k
[orga-
Reconfigurable Wireless Sensor Networks Simulator (RWSNSim): A New Discrete-event Simulator
353
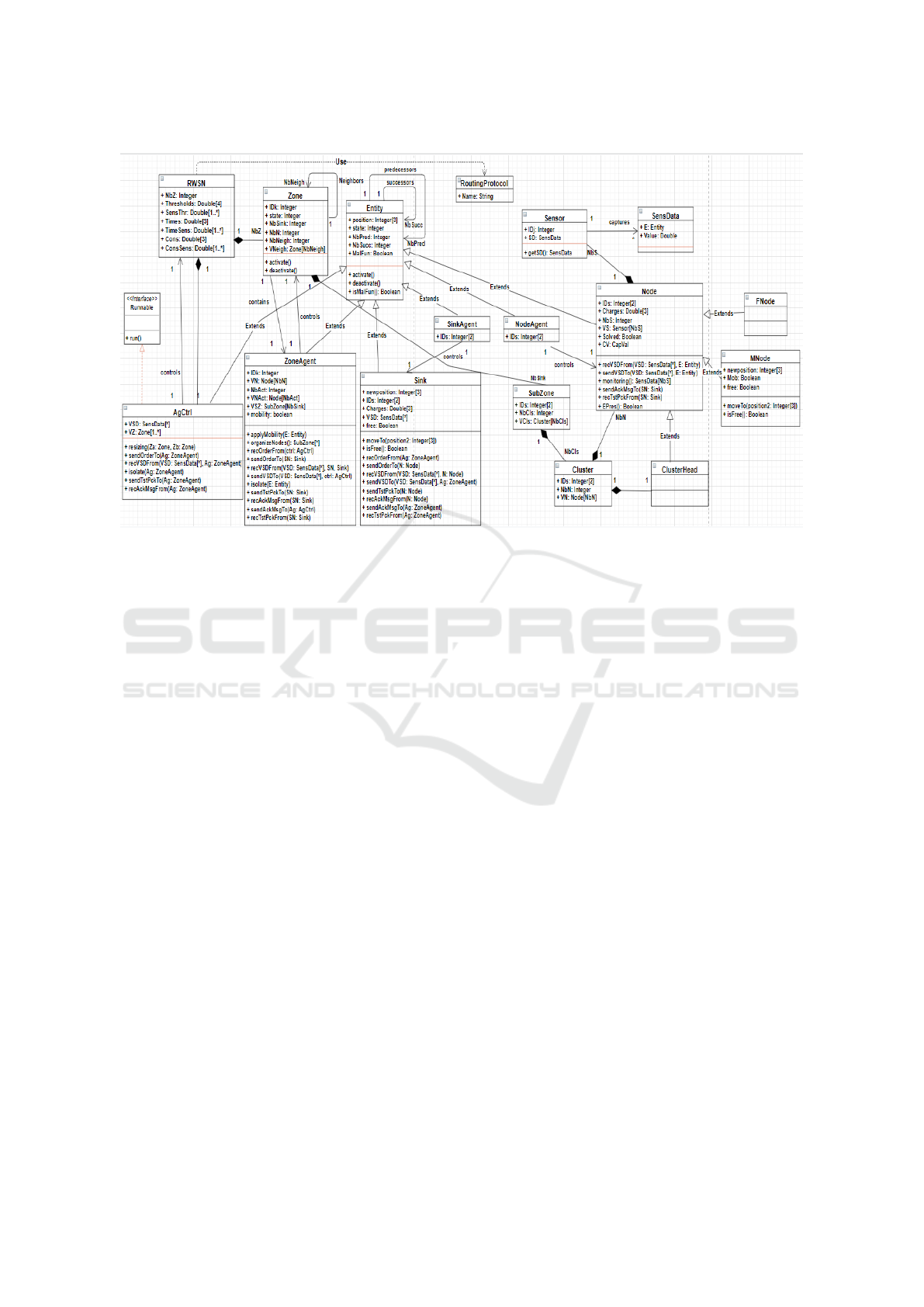
Figure 2: RWSN class diagram.
nizeNodes(): SubZone[*]], applying the mobil-
ity task [applyMobility(E: Entity)], and isolate the
malfunctioning sinks and sensor nodes [isolate(E:
Entity)].
• Sink: it models each mobile sink node SN
m,k
in RWSN. It extends from the Entity class and
contains the mobile sink nodes’ properties like
identifiants [IDs], new position coordinations
[newposition], and a boolean property [free]
and operations such as moving to another po-
sition [moveTo(position2: Integer[3])], sending
an acknowledge message to the zone agent Ag
k
[sendAckMsgTo(Ag: ZoneAgent)] and sending a
test packet to a sensor node N
i,k
[sendTstPckTo(N:
Node)].
• Sensor: it models each sensor Sens
j,N
i,k
in a sen-
sor node N
i,k
. It extends from the Entity class and
contains the sensors’ principal properties such as
a sensing value [SD].
3.2.3 Validation Model
In order to validate the class diagrams which are pre-
sented in figure 1 and 2, we use natural language and
ROCL. The natural language permits to describe the
different constraints that must be respected by the dif-
ferent entities in each network. While, ROCL allows
formalizing them. We present in the following some
constraints that must be respected by some entities in
an RWSN.
A. Natural Language - Constraint 01
• AgCtrl Class: in this class, we have two impor-
tant constraints which are explained as follows:
- Before the application of the resizing task be-
tween two zones Z
a
and Z
b
, the following condi-
tions must be met:
a- The number of active nodes in Z
a
must be less
than or equal to Λ = T hresholds[3] .
b- Z
b
must be a neighbor zone of Z
a
which con-
tains the minimum number of active nodes.
- After the application of the resizing task between
Z
a
and Z
b
the following results must be met:
a- The number of zones will be decreased.
b- The number of nodes in Z
b
will be increased.
c- The zone agent Ag
a
and Z
a
will be deactivated.
d- The number of sinks in Z
b
will be increased.
e- The number of Z
b
neighbors will be increased.
B. Natural Language - Constraint 02
• ZoneAgent Class: in this class, we have two im-
portant constraints which are defined as follows:
- If the total charge of a node N
i,k
∈ S
N
is less than
or equal to α = T hresholds[1], the zone agent Ag
k
must apply the mobility task.
- After the application of the mobility, the deac-
tivation or the isolation of sensor nodes or sink
nodes in a zone Z
k
, Ag
k
must organize the order
of nodes in Z
k
in subzones into clusters.
ICSOFT 2022 - 17th International Conference on Software Technologies
354
ROCL - Constraint 01
context AgCtrl, RW SN, ZoneAgent Aga INV
resizing(Zone Za, Zone Zb) :: Execute()
IMPLIESdeacivate(Aga)ANDdeactivate(Za)
pre : Za.NbNAct ≤ T hresholds[3] AND
Za.V Neigh → includes(Zb) AND Zb.NbNAct ≤
Za.V Neigh.allInstances → NbNAct
post : NbZ = NbZ − 1 AND
Zb.NbN = Zb.NbN + Za.NbN
deacivate(Za) :: Execute() IMPLIES
Zb.NbSink = Zb.NbSink + Za.NbSinkAND
Zb.NbNeigh = (Zb.NbNeigh − 1) + Za.NbNeigh
AND Zb.V Neigh = Zb.V Neigh −
Za → union(Za.V Neigh)
ROCL - Constraint 02
context ZoneAgent Ag, Entity E,
NodeN, SinkSN, MNodeMNINV
IF (N.charges[2] ≤ α) IMPLIES
(applyMobility(MN) OR applyMobility(SN))
context deactivate(Entity E) :: Execute()
(Node, Sink) → includes(sel f ) IMPLIES
organizeNodes()
context Node N, ZoneAgent Ag, Entity E,
Ag.applyMobility(Entity E) :: Execute()
(MNode, Sink) → includes(sel f ) IMPLIES
organizeNodes()
C. Natural Language - Constraint 03
• Sink Class and MNode Class: in these classes,
we have an important constraint which is defined
as follows:
- When a zone agent Ag
k
applies the mobility of a
mobile entity E where E is a mobile sink node or
a mobile node. The following changes will take
place:
a- The position of E must be changed.
b- The charge of the principal battery of E must
be decreased.
ROCL - Constraint 03
context Sink E, MNodeE, E.moveTo(position2 :
Integer[3]) :: Execute()
post :E.Charges[0] = E.charges[0]−
Emob(newposition, position2)
AND E.newposition = position2
3.3 Databases Modeling
To create the databases used to store the information
related to the simulated WSNs and RWSNs, we model
them using entity relationship diagrams (ERD). In-
deed, we have two ERDs:
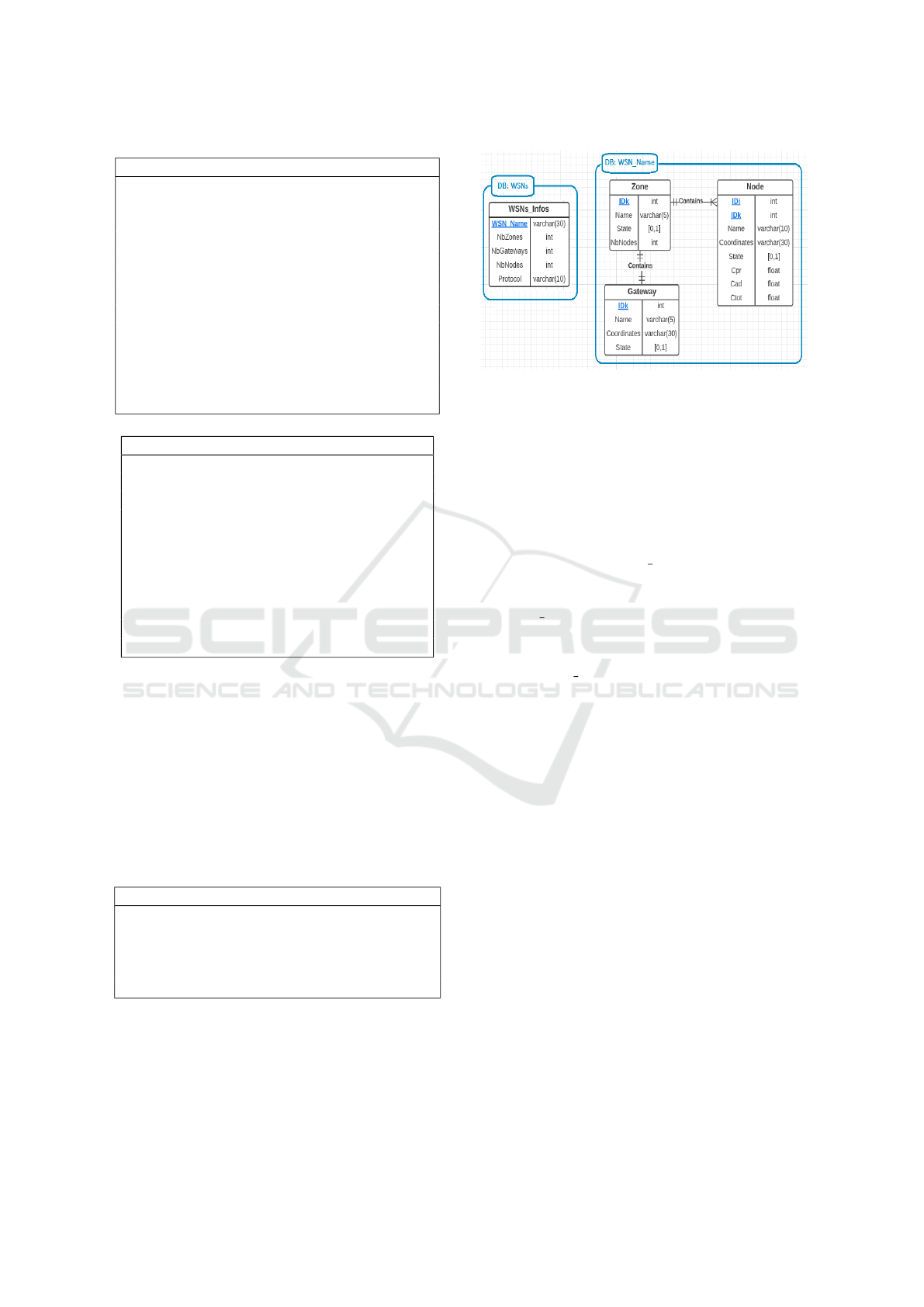
Figure 3: Entity relationship diagram for WSNs used by
RWSNSim.
1) ERD for WSNs: Figure 3 presents the entity
relationship diagram of wireless sensor networks used
in RWSNSim to generate the databases used to store
the wireless sensor networks’ information entered by
the user or generated automatically. It contains the
following databases:
• [DB: WSNs]: is a database that includes a sin-
gle entity named WSN Infos. It is a weak entity
which contains the general information of each
wireless sensor network such as the WSN name
[WSN Name] which is the key attribute, the num-
ber of zones [NbZones], and the used protocol
[protocol].
• [DB: WSN Name]: For each WSN created by the
user, a database with the same name is created to
store its information. It includes three entities de-
fined as follows:
– Zone: is a strong entity which contains the gen-
eral information of each zone like an identifi-
ant [IDk] which is the key attribute, its state
[State], and the number of sensor nodes it con-
tains [NbNodes].
– Gateway: is a strong entity which contains the
general information of each gateway in the net-
work such as its identifiant [IDk] which is the
key attribute, its coordinates which presents its
position in the network environment [Coordi-
nates], and its state [State].
– Node: is a strong entity which contains the gen-
eral information of each sensor node in the net-
work such as two identifiants [IDi, IDk] which
are the key attributes, the initial charge of the
principal battery [Cpr], and the initial charge
of the additional battery [Cad].
2) ERD for RWSNs: Figure 4 presents the en-
tity relationship diagram of reconfigurable wireless
sensor networks used in RWSNSim to generate the
databases used to store the reconfigurable wireless
Reconfigurable Wireless Sensor Networks Simulator (RWSNSim): A New Discrete-event Simulator
355
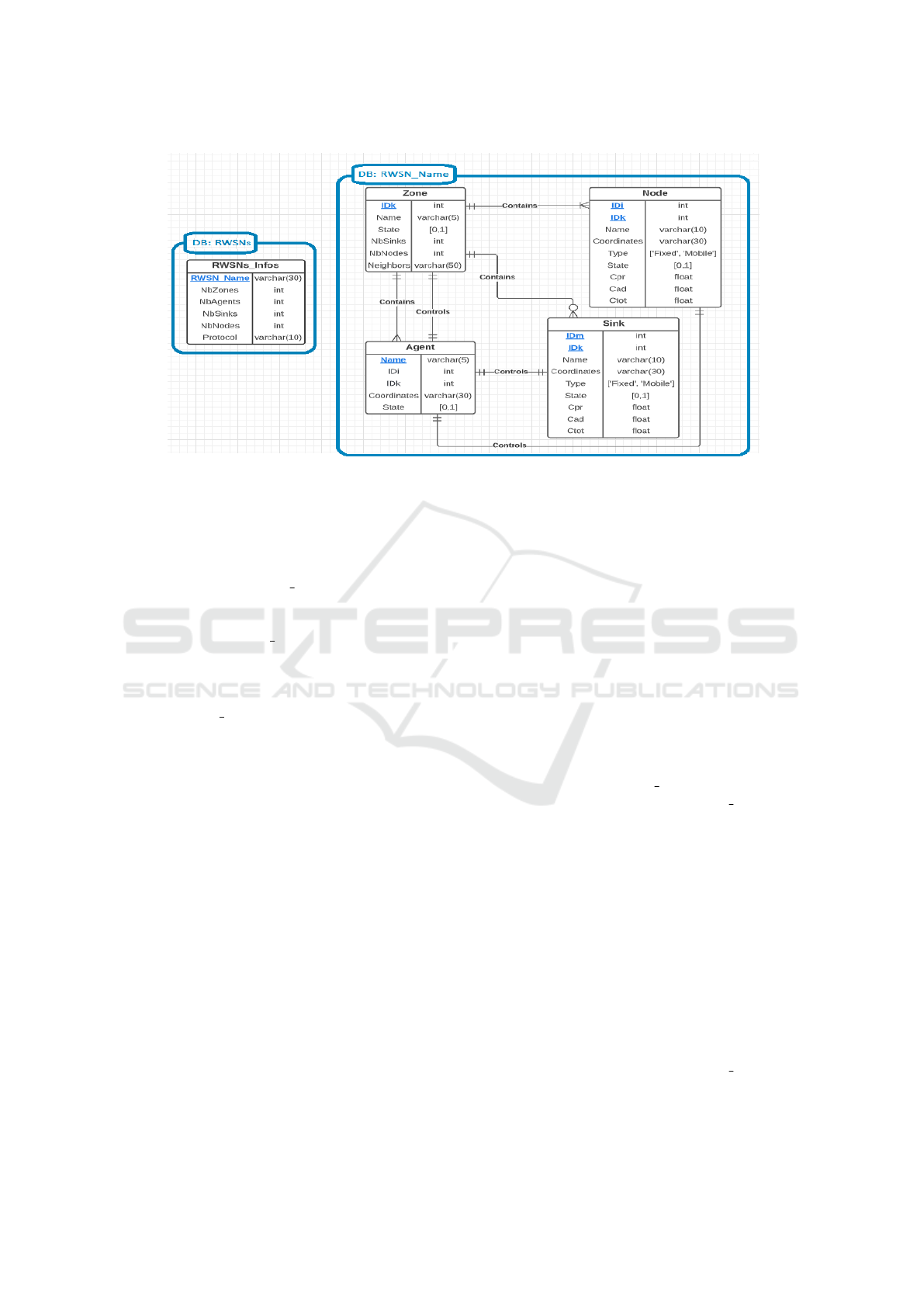
Figure 4: Entity relationship diagram for RWSNs used by RWSNSim.
sensor networks information entered by the user or
generated automatically. It contains the following
databases:
• [DB: RWSNs]: is a database that includes a sin-
gle entity named RWSN Infos. It is a weak entity
which contains the general information of each re-
configurable wireless sensor network such as the
RWSN name [RWSN Name] which is the key at-
tribute, the number of agents whatever their types
[NbAgents], and the number of sink nodes [Nb-
Sinks].
• [DB: RWSN Name]: For each RWSN created by
the user, a database with the same name is created
to store its information. It includes four entities
defined as follows:
– Zone: is a strong entity which contains the gen-
eral information about each zone like an identi-
fiant [IDk] which is the key attribute, its name
[Name], and the list of neighbor zones [Neigh-
bors].
– Agent: is a strong entity which includes the
general information about each zone agent in
the network such as its name [Name] which is
the key attribute, its coordinates which present
its position in the network environment [Coor-
dinates], and its state [State].
– Sink: is a strong entity which contains the gen-
eral information of each sink node in the net-
work like two identifiants [IDm, IDk] which are
the key attributes, its type which can be ’fixed’
or ’mobile’ [Type], and the total charge of its
batteries [Ctot].
– Node: is a strong entity which includes the gen-
eral information of each sensor node in the net-
work such as two identifiants [IDi, IDk] which
are the key attributes, its coordinates which
present its position in the network environment
[Coordinates], and its type which can be ’fixed’
or ’mobile’ [Type].
4 CASE STUDY
In this case study, we simulate a reconfigurable wire-
less sensor network to show all provided services by
RWSNSim which cannot be shown if we simulate a
wireless sensor network such as mobility and resizing
notification windows.
We propose a reconfigurable wireless sensor
network denoted by RWSN UnderWater as a simu-
lation example with RWSNSim. RWSN UnderWater
is composed of a base station termed by BS,
a controller agent denoted by Ag
Ctrl
, and two
zones {Z
1
and Z
2
}. Each zone Z
k
|k ∈ {1, 2}
contains one zone agent Ag
k
, 20 sensor nodes
(12 fixed nodes and 8 mobile nodes) denoted by
S
N
= {N
i,k
|i ∈ [1..20] k ∈ 1, 2}, and 3 mobile sink
nodes termed by S
SN
= {SN
m,k
|m ∈ [1..3]}. Each sen-
sor node has two sensors: CO
2
sensor and CH
4
sensor.
A. Choosing the Appropriate Routing Protocol
In RWSNSim, we have two routing protocols:
LEACH and WBM-TEEN. Before the construction
of a WSN or an RWSN network, the user has to
choose one of them. In this case study, we chose
LEACH protocol to simulate RWSN UnderWater
network.
ICSOFT 2022 - 17th International Conference on Software Technologies
356
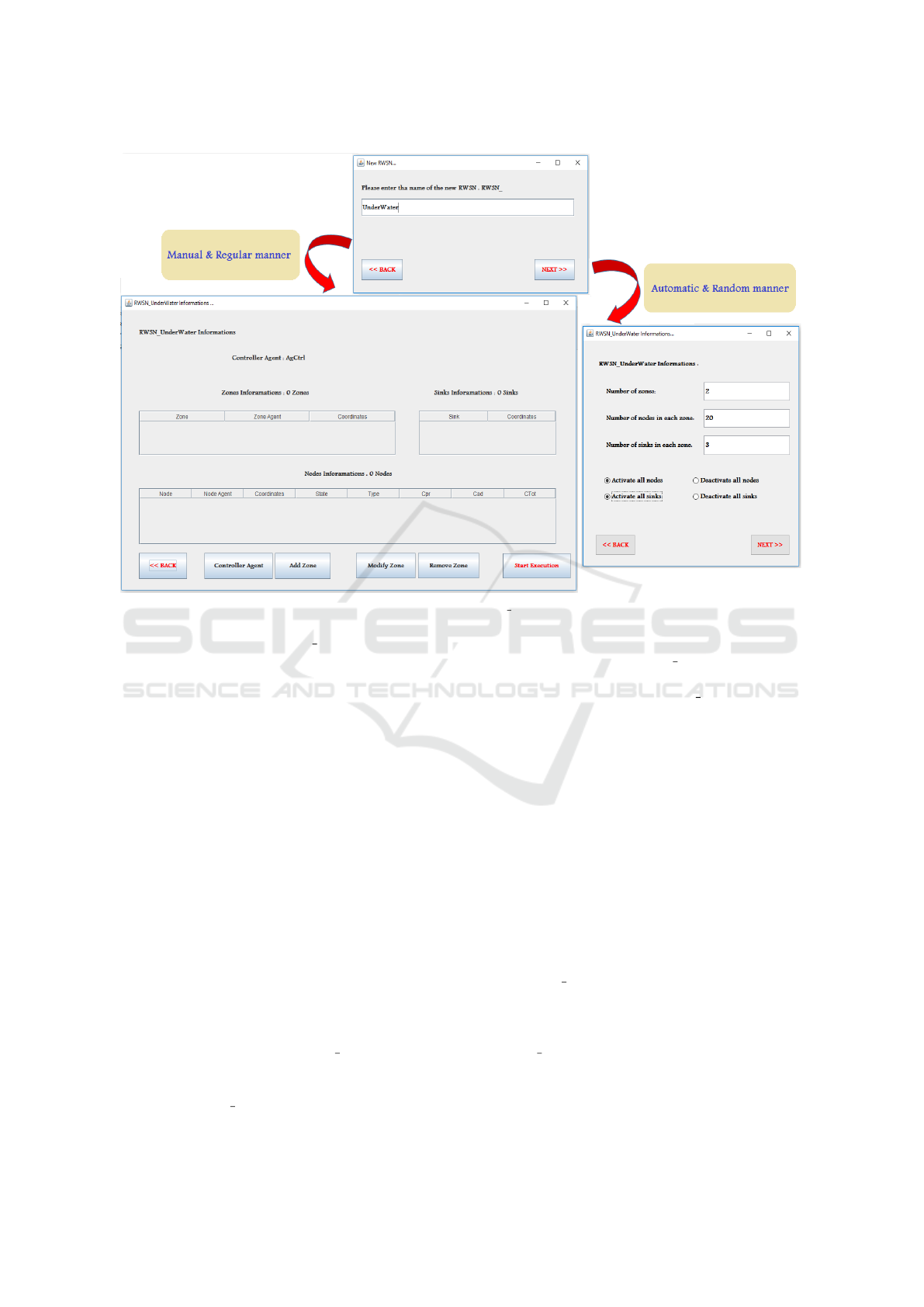
Figure 5: The two manners to construct RWSN UnderWater using RWSNSim.
B. Construction of RWSN UnderWater using
RWSNSim
With RWSNSim, the user can construct a WSN or an
RWSN and save it in a database. We have two man-
ners of network construction:
1) Manual and regular: depending on this manner,
all information related to each entity in the network
must be entered manually such as the coordinates and
the state of each entity.
2) Automatic and random: depending on this man-
ner, all information related to each entity in the net-
work is randomly selected by the system according
to some inputs such as the total number of zones and
the number of sensor nodes and sink nodes in each
zone. All information can be modified by the user in
the created database.
Figure 5 shows these two manners in the
RWSNSim graphic user interface.
In the proposed case study, we chose the manual
and regular manner. Therefore, we have added two
zones and the entities they contain (zone agents, mo-
bile sink nodes, and sensor nodes) with their informa-
tion.
After the construction of RWSN UnderWater net-
work, RWSNSim saves all information entered by the
user or generated automatically in a database. Figure
6 shows the RWSN UnderWater information stored in
a database using RWSNSim.
C. Execution of RWSN UnderWater using
RWSNSim
After the construction of RWSN UnderWater net-
work, the user can start its execution. Before start-
ing the network execution, RWSNSim demands a set
of parameters and thresholds which showed in fig-
ure 2 and detailed in the methodology proposed in
(Rouainia et al., 2022) like α (which is an energy
charge threshold in sensor nodes used by the zone
agent Ag
k
to apply the mobility), γ (which is a num-
ber of active sensor nodes threshold in a zone Z
k
used
by the zone agent Ag
k
to apply the mobility), and λ
(which is a number of active sensor nodes threshold
in a zone Z
k
used by the controller agent Ag
Ctrl
to ap-
ply the resizing of zones). After that, two windows
appear: the simulation graph window and the execu-
tion report window.
1) Simulation graph window: it displays the dif-
ferent RWSN UnderWater network entities and their
distribution in the network and shows the communi-
cation between them in real time. Figure 7 presents
the simulation graph captured during the simulation
of RWSN UnderWater network.
2) Execution report window: It is a window
containing the different sensing data values received
by the controller agent from zone agents. Figure 8
Reconfigurable Wireless Sensor Networks Simulator (RWSNSim): A New Discrete-event Simulator
357
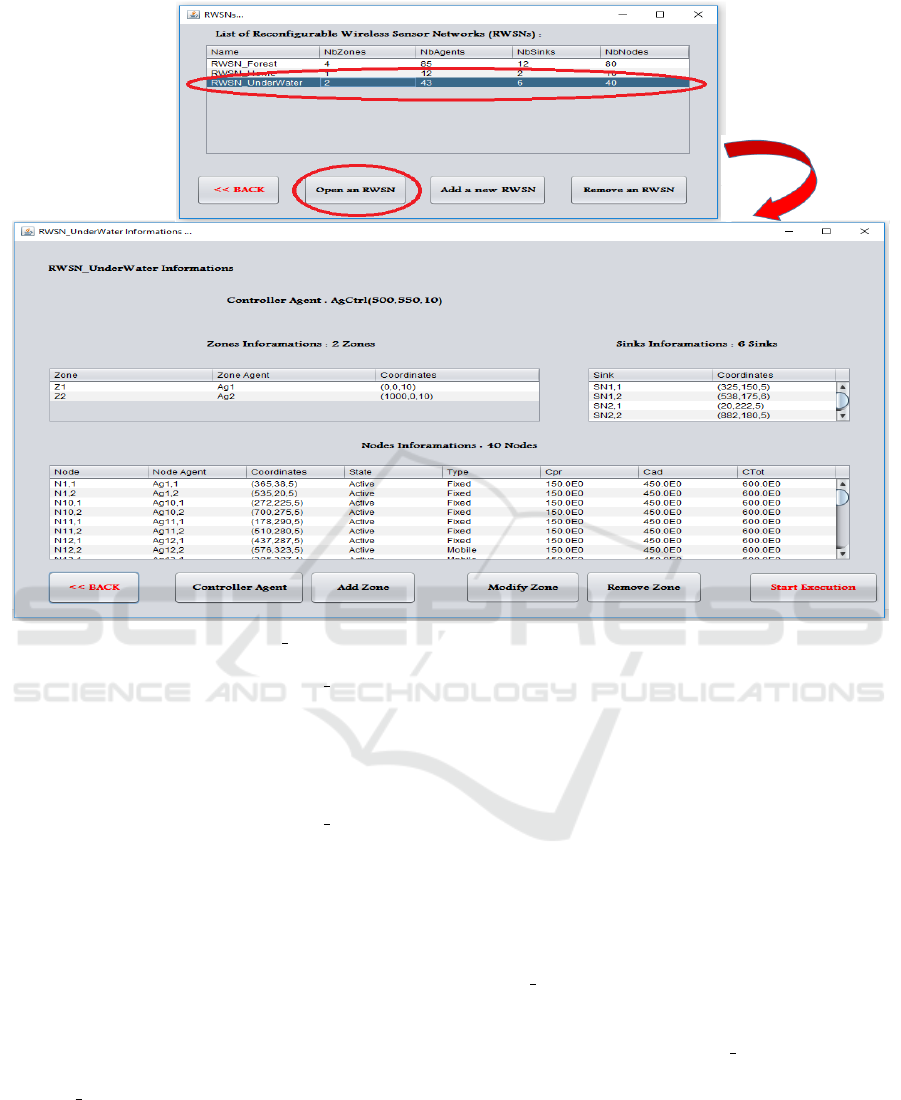
Figure 6: RWSN UnderWater information stored in a database using RWSNSim.
displays the execution report of RWSN UnderWater
network using RWSNSim.
D. Notifications & Alerts
During the simulation, many notification and alert
windows appear synchronized with various events
that occur during the execution of RWSN UnderWater
network. There are four types of notification and alert
windows defined as follows:
1) Deactivation notification window: It appears
when an entity or a zone in the network is deactivated.
Figure 9 shows the deactivation notification window
which appears when the node N
6,1
is deactivated.
2) Mobility notification window: It appears when
a mobile entity in the network has moved to another
position. Figure 9 illustrates the mobility notifica-
tion window which appears when the mobile sink
nodes SN
1,2
and SN
2,2
have moved to other positions
in RWSN UnderWater network.
3) Resizing notification window: It appears when
the controller agent Ag
Ctrl
applies the resizing of
zones between two zones Z
a
and Z
b
where a ∈
[1..NbZ] and b ∈ [1..NbZ]. Figure 9 illustrates the re-
sizing notification window which appears when the
controller agent Ag
Ctrl
applies the resizing between
Z
1
and Z
2
.
4) Alert window: It appears with an alert sound
when the controller agent Ag
Ctrl
received sensing
data with values exceeding the sensing data thresh-
olds which are illustrated in figure 2 and detailed
in the methodology proposed in (Rouainia et al.,
2022). Figure 9 shows the alert window which
appears when the controller agent Ag
Ctrl
received
several sensing data with values exceeding the
sensing data thresholds (CO2T hreshold = 5% and
CH4T hreshold = 10%).
E. Draw the Obtained Line Chart of
RWSN UnderWater using RWSNSim
After the simulation, RWSNSim provides the obtained
results in the form of line charts. Figure 10 displays
the obtained line chart of RWSN UnderWater.
Finally, we note that RWSNSim is not a specific
simulator developed to implement a specific method-
ology, but rather tends to be more generalized. In-
deed, it can simulate WSNs and RWSNs without ap-
plying the proposed methodology in (Rouainia et al.,
2022). It has also the scability to include new solu-
tions, techniques and routing protocols.
ICSOFT 2022 - 17th International Conference on Software Technologies
358
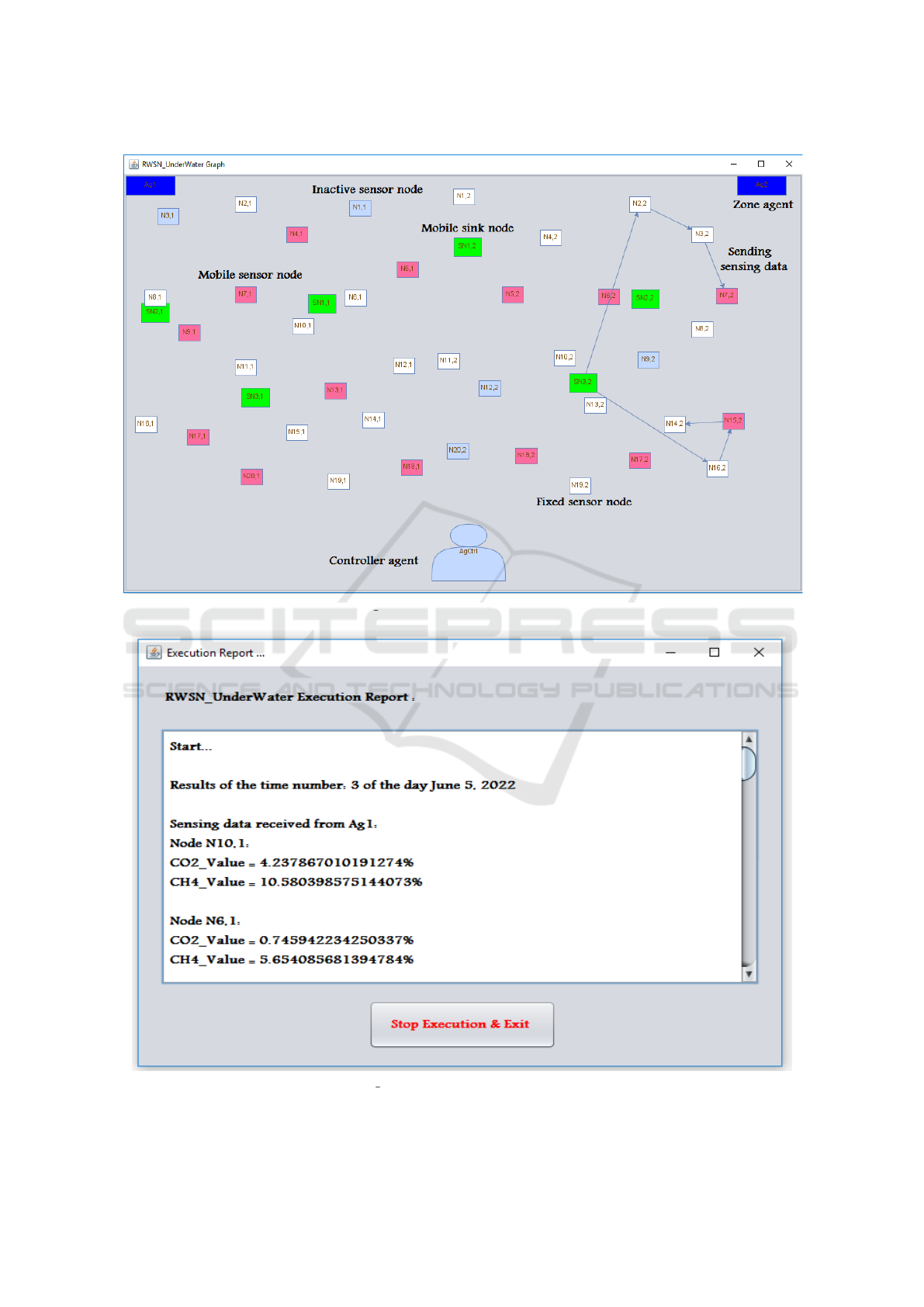
Figure 7: RWSN UnderWater simulation graph using RWSNSim.
Figure 8: RWSN UnderWater execution report using RWSNSim.
Reconfigurable Wireless Sensor Networks Simulator (RWSNSim): A New Discrete-event Simulator
359
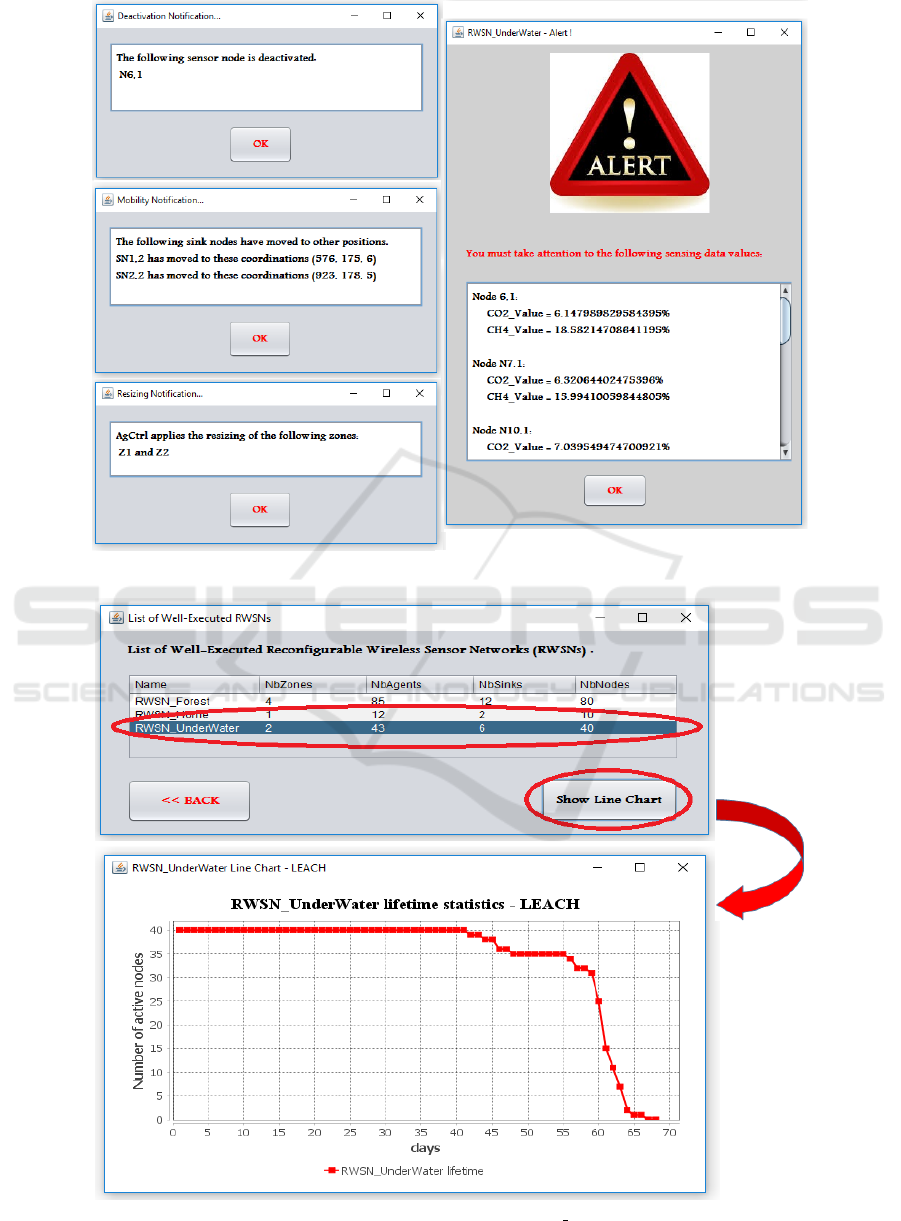
Figure 9: Notifications and alert windows.
Figure 10: The obtained line chart of RWSN UnderWater.
ICSOFT 2022 - 17th International Conference on Software Technologies
360

5 CONCLUSION
In this paper, we proposed a new discrete-event
simulator designed for WSNs and RWSNs named
RWSNSim. We described the provided services by the
proposed simulator. We also modeled the architecture
of WSNs and RWSNs used by RWSNSim. Further-
more, we modeled the databases used by RWSNSim.
The proposed simulator permits simulating WSNs
and RWSNs with hundreds of entities. In the future,
we will strive to improve the proposed simulator by
adding new routing protocols, new solutions and tech-
niques, new features, and new types of charts.
REFERENCES
Agrawal, D. P. (2017). Sensor nodes (sns), camera sensor
nodes (c-sns), and remote sensor nodes (rsns). In Em-
bedded Sensor Systems, pages 181–194. Springer.
GloMoSim (2020). GloMoSim Simulator Projects
: Online Network Simulator : Network Simu-
lation Tools. https://networksimulationtools.com/
glomosim-simulator-projects/. [Online; accessed 27-
March-2022].
Grichi, H., Mosbahi, O., and Khalgui, M. (2015). Rocl:
New extensions to ocl for useful verification of flexi-
ble software systems. pages 45–52.
Grichi, H., Mosbahi, O., and Khalgui, M. (2016a). A devel-
opment tool chain for reconfigurable wsns. In Fujita,
H. and Papadopoulos, G. A., editors, New Trends in
Software Methodologies, Tools and Techniques - Pro-
ceedings of the Fifteenth SoMeT 16, Larnaca, Cyprus,
12-14 September 2016, volume 286 of Frontiers in Ar-
tificial Intelligence and Applications, pages 101–114.
IOS Press.
Grichi, H., Mosbahi, O., Khalgui, M., and Li, Z. (2016b).
Rwin: New methodology for the development of re-
configurable wsn. IEEE Transactions on Automation
Science and Engineering, PP:1–17.
Hafidi, Y., Kahloul, L., Khalgui, M., Li, Z., Alnowibet, K.,
and Qu, T. (2020). On methodology for the verifica-
tion of reconfigurable timed net condition/event sys-
tems. IEEE Transactions on Systems, Man, and Cy-
bernetics: Systems, 50(10):3577–3591.
JSim (2022). GitHub - nmcl/JavaSim: JavaSim simula-
tion classes and examples. https://github.com/nmcl/
JavaSim. [Online; accessed 27-March-2022].
Khriji, S., Houssaini, D., Kammoun, I., and Kanoun, O.
(2018). Energy-efficient techniques in wireless sensor
networks: Technology, Components and System De-
sign, pages 287–304.
Nayyar, A. and Singh, R. (2015). A comprehensive re-
view of simulation tools for wireless sensor networks
(wsns). pages 19–47.
NS3 (2022). ns-3 : a discrete-event network simulator for
internet systems. https://www.nsnam.org/. [Online;
accessed 26-March-2022].
OMNeTPP (2019). OMNeT++ Discrete Event Simulator.
https://omnetpp.org/. [Online; accessed 27-March-
2022].
Rajan, C., Geetha, K., Priya, C. R., Geetha, S., and
Manikandan, A. (2015). A simple analysis on novel
based open source network simulation tools for mo-
bile ad hoc networks. volume 5, pages 716–721.
Rouainia, H., Grichi, H., Kahloul, L., and Khalgui, M.
(2020). 3d mobility, resizing and mobile sink nodes
in reconfigurable wireless sensor networks based on
multi-agent architecture under energy harvesting con-
straints. In Proceedings of ICSOFT 2020, volume 97,
pages 394–406. ScitePress.
Rouainia, H., Grichi, H., Kahloul, L., and Khalgui, M.
(2022). New energy efficient and fault tolerant
methodology based on a multi-agent architecture in
reconfigurable wireless sensor networks. pages 405–
417.
RWiN (2016). RWiN-Project: New Solutions for Reconfig-
urable Wireless Sensor Networks. https://lisi-lab.wix.
com/rwinproject. [Online; accessed 26-March-2022].
RWSNSim (2022). RWSNSim: Reconfigurable Wireless
Sensor Networks Simulator. https://hanenerouainia.
wixsite.com/rwsnsim. [Online; accessed 20-April-
2022].
Vijayalakshmi, S. and Muruganand, S. (2018). Wireless
Sensor Network: Architecture - Applications - Ad-
vancements. Mercury Learning & Information, 1 edi-
tion.
Reconfigurable Wireless Sensor Networks Simulator (RWSNSim): A New Discrete-event Simulator
361
