
Web based User Interface Solution for Remote Robotic Control and
Monitoring Autonomous System
Hugo Perier
1
a
, Eloise Matheson
2
b
and Mario Di Castro
2
c
1
CERN, EN-IM-PLM, 1217 Geneva, Switzerland
2
CERN, BE-CEM-MRO, 1217 Geneva, Switzerland
Keywords: Robotic, User Interface, User Experience, Web Design, Web Application, Software Solution.
Abstract: The area of robotic control and monitoring, or automated systems, covers a wide range of applications. The
operating system, the kind of control, and the size of the screen used to present information to the user all
vary in different robotic or industrial systems. This article proposes a system based on a user interface for
real-time robotic control or monitoring of autonomous systems using web technologies laid on open-source
projects. The purpose of this software is to be highly scalable over time and easily pluggable into different
types of robotic solutions and projects. It must offer a high user experience and an appealing modern UI
design, allowing technicians not expert in robot operation to perform interventions or maintenance tasks. The
web environment provides an ideal platform to ensure the portability of the application so that it can be
released on a multitude of devices, including laptops, smartphones, and tablets. This article introduces and
describes the module, features, and advantages of the Neutron Framework. It presents how the users can
interact with it and how to integrate this solution inside the CERN's Mechatronic Robotic and Operation
solution.
1 INTRODUCTION
The increase of new technologies and innovation in
the domain of digital technology has pushed robotics
as a major research domain in 2022. While industry
4.0 is already a revolution (I-Scoop, 2022), there are
many fields which will continue to be impacted by the
innovation in robotics, such as education (Eguchi,
2014), logistics (Day, 2021), transport (Forrest &
Konca, 2007), and the space industry (Katz, D. &
Some, R., 2003), among others. One of the key points
of a robotic solution is its ability to be controlled in
real time by an operator or monitored in the case of
an autonomous system. CERN's Mechatronics,
Robotics, and Operation (BE-CEM-MRO) section is
undertaking research and development on robotic
systems for achieving interventions in hazardous
areas. CERN's MRO section has developed its own
framework for robotics, the CernTauro (Di Castro et
al., 2018), also called the Cern Robotic Framework
(CRF). The CRF is built as a micro-services
a
https://orcid.org/0000-0002-5201-9817
b
https://orcid.org/0000-0002-1294-2076
c
https://orcid.org/0000-0002-2513-967X
architecture that consists of a collection of separate
components that operate on the system that powers
the robot. It is possible to connect to and interact with
the components using the TCP or UPD protocol. The
CRF uses a structured way to exchange messages to
receive information or to make requests to trigger
action, with a bi-directional voluntary messaging
system so that the client receives information about
the status of their requests. The Neutron solution has
been designed to cover a wide range of use cases and
different scenarios, from planning to the realization of
a robotic intervention. The software also allows the
monitoring of an autonomous robotic system. It is
possible for users to benefit from a rich API to create
robotic behaviours using visual programming (Davis
et al., 2011) to cover specific needs or for educational
purposes. The program also contains a plugin
mechanism that allows users to simply enhance the
app's functionality in the event of unusual
requirements.
680
Perier, H., Matheson, E. and Di Castro, M.
Web based User Interface Solution for Remote Robotic Control and Monitoring Autonomous System.
DOI: 10.5220/0011318800003271
In Proceedings of the 19th Inter national Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 680-687
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
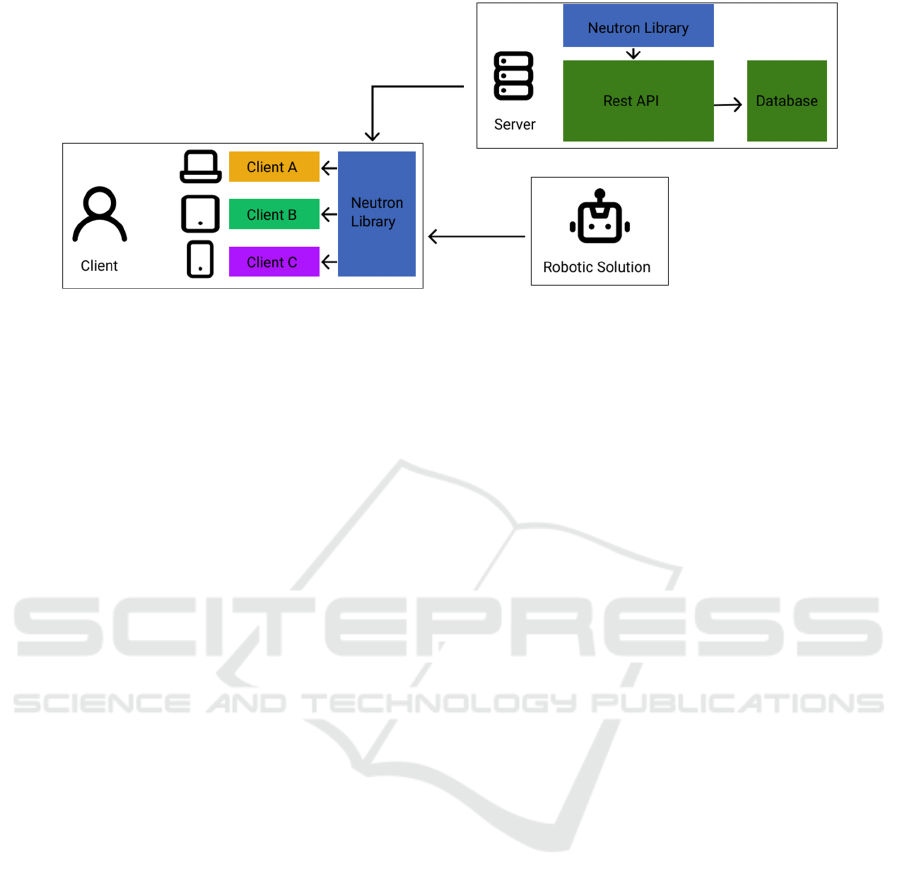
Figure 1: An overview of the proposed framework.
2 GENERAL OVERVIEW
The proposed solution includes multiple client
applications that will be used by the end user, as well
as a REST API (Li et al., 2016) running on a server.
The setup of these clients consists of a combination
of user-side applications (React and React Native)
and custom backend code written in NodeJS to allow
communication with the robotic solution, as well as
our REST API. React and React Native are used to
power the clients; the usage of these front-end
frameworks allows for a high level of interoperability
as well as software portability between computers,
laptops, smartphones, and tablets. Electron is used
here to embed the React web-application into a
desktop application (Kredpattanakul, 2019). The
Neutron Library, written in NodeJS and Typescript,
provides each client with the tools they need to
interface with the robotic system and access the
REST API's services. NodeJS and Express have been
used to create the REST API. This is designed to
provide services to clients' applications, to centralize
data, and to act as an inference server that can be used
to run powerful machine learning algorithms. The
desktop application may be used to organize a robotic
intervention, including defining the aim and reasons
for the intervention, the materials required, and the
general prerequisites for a successful outcome. It is
possible to define objectives and have an overview of
the completion of those in the event of recurrent
interventions, allowing participants to observe the
overall progress unless the objectives are met. The
database stores and centralizes all information
regarding a previous intervention or the monitoring of
an autonomous system. This enables powerful
analytical capabilities and simplifies the process of
debugging potential issues, as well as encourages
iteration based on data acquired by robotic systems
(Cabi et al., 2019). The software's user interface and
user experience are both built following the rules
promoted by the atomic design principles (Frost,
2016).
3 SOFTWARE SOLUTION
3.1 HTTP Rest Api
The Rest Api is written in Node and is uses the
Express framework. This API's primary objective is
to provide services to the clients, such as an
authentication system, information about the
planification and progress of a robotic intervention,
synchronization of configuration files, log
aggregation, serving information about the connected
robotic systems, or to be used as an inference server
to benefits from powerful machine learning
algorithms. The Rest API has security features to
ensure that illegitimate foreign clients cannot connect
to or transfer data to a robot. The information about
the connection attempt is recorded every time a client
makes a request to the API, allowing the
administrator to keep track of the request flow.
Protection against spam and SQL injection are in
place to assure the API is not vulnerable from a
malicious tier. To access the interface's functions, a
client must be authenticated with the server. During
the authentication procedure, an internet connection
is necessary in order to get a token, which is
subsequently provided to the robot so that it knows
the client is trustworthy (Figure 2).
The process of gathering the logs of the robotic
system in the database provides a powerful tool for
data analysis. When the internet bandwidth permits it
or when real-time control is off, actions performed on
the software and in the robotic systems are registered
Web based User Interface Solution for Remote Robotic Control and Monitoring Autonomous System
681
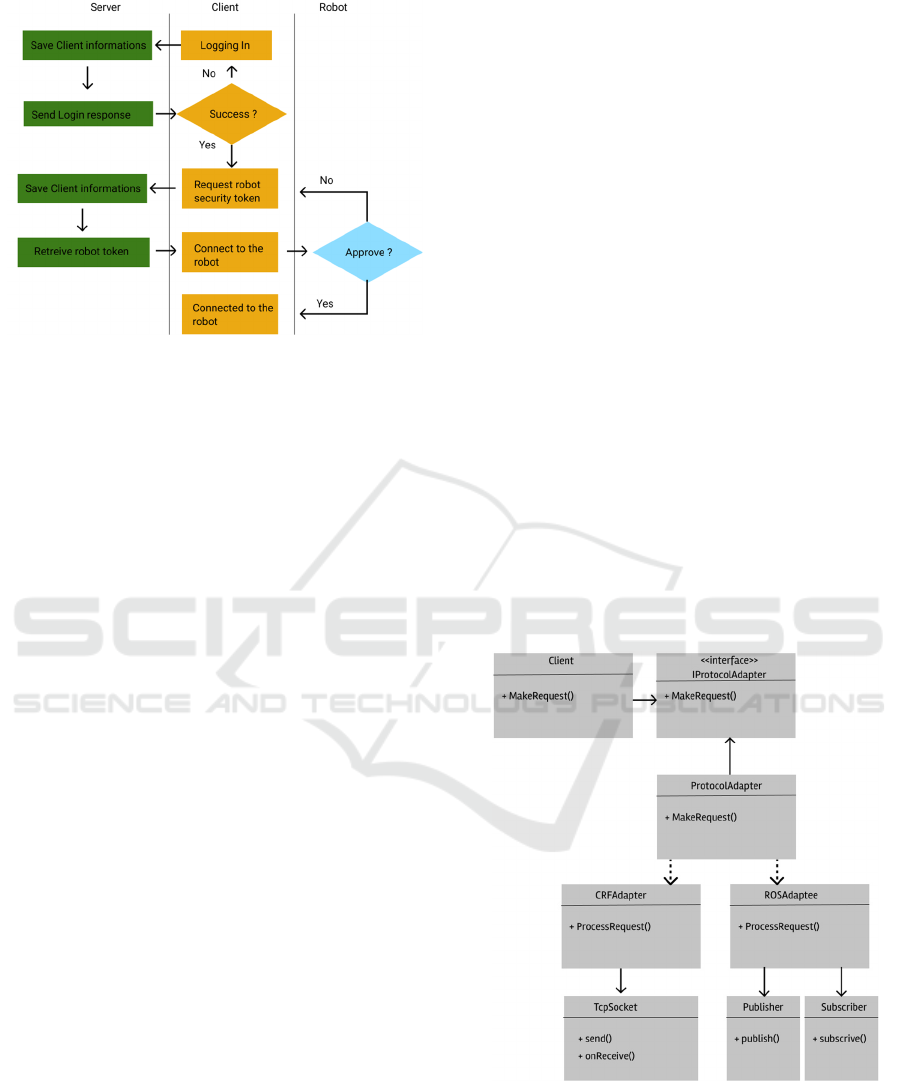
Figure 2: The connection lifecycle.
and forwarded to a server. These data can be analysed
to help enhance the overall robotic system by
identifying time-consuming human behaviours and
recognizing recurrent patterns that might be
automated (Cabi et al., 2019). This also provides a
means of identifying and eliminating what went
wrong in the event of a collision, a crash, or undesired
robot or operator conduct. The database can also be
used to track system metrics and as an operation
history log that might be useful in future manual or
autonomous operations (Fourie et al., 2017). The
choice of MongoDB has been made because of its
flexible schema requirements and its ability to handle
large amounts of data efficiently by partitioning the
database into shards, making it a very scalable
solution as a database. It is possible to benefit from
MongoDB Compass, which is an interactive and
open-source tool for querying, optimizing, and
analysing MongoDB data. This visual editing tool
also enables users to understand and analyse data sets
without a formal education in MongoDB query
syntax and addresses MongoDB’s inability to
natively support SQL. MongoDB’s data can easily be
extracted into JSON format and then be analysed with
external tools such as Python or R programming
(Mahmood & Risch, 2021).
3.2 The Neutron Library
The Neutron Library provides all the necessary tools
in order to connect, control or interact with the robotic
solution. The library is written in Nodejs and
Typescript. These technologies are easy to bundle,
allowing the library to be used by all the available
GUIs as well as the REST API. The main concept of
the library is to create a Neutron Context. This
context can be used to create one or multiple
connections to a robotic system. A connection is an
object that contains a collection of clients, connected
to the robotic system's processes. This object provides
useful functionality for monitoring the connection's
lifetime as well as exposing the robotic system's API.
The library’s plugin-based approach allows to easily
implement extensions during runtime.
3.2.1 Dynamic Protocol
The Neutron Library uses a strongly dynamic
protocol in order to be able to support a large range of
different robot operating system APIs. Adapters
(Alves & Borba, 2002) are available to define the
method of communication with one or multiple
servers (Figure 3). This dynamic protocol can be
defined as a combination of one or multiple transport
layers (TCP, UPD, RPC) and a communication
protocol (plain text, json, xml). The Neutron Library
can handle multiple nodes, each using a different
protocol. It is possible to connect to a REST server, a
basic TCP server, and lastly, a ROS node, for
example. Configuration files will be required to
define the protocol of a robotic system, and an update
will be necessary only when the protocol is modified.
Configurations are stored and sourced on the Rest
API and are synchronized across the many clients of
the program used by the solution's customers.
Figure 3: The communication and protocol adapters.
3.2.2 Capacitor
The Neutron Library provides the capability to
operate as a capacitor. A client can make a request to
the Neutron Library, which will be forwarded to a
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
682

specific host. A system like this is valuable for
coordinating multiple robotic systems or dealing with
the situation when one system is not connected to
another. It is sometimes necessary to isolate a section
of a system for security concerns. Using the client as
a proxy allows to take advantage of such a system
while maintaining its flexibility. By changing
protocol while the request is forwarded, a web
application hosted on a browser can communicate
with a robotic system that does not support web
socket-based communication protocol.
3.2.3 Plugin System
At any time, plugins can be mounted and unmounted.
A class that implements the NeutronPlugin interface
is referred to as a Neutron Plugin. The NeutronPlugin
interface is designed to walk the plugin developer
through all the requirements and options provided by
the Neutron Library. A validation method is used to
mount a plugin based on specified requirements or
dependencies. Plugins are designed to enhance or
modify the software's functionality. They can adapt
and respond to an incoming message from the server
or a request that is about to be made to a host. Plugins
also allow the user to alter the behaviour of parts of
the software's services, such as the robotic system's
connection process, the logger, or, in some situations,
to build custom functionality. Plugins can be loaded
at the start of the software's execution or during
runtime to add new functionality to the program. It is
a clever technique to provide certain attachable and
detachable features for a specific need (Chatley et al.,
2003).
3.3 User Interfaces
The Neutron desktop application uses React as the
front-end framework and Electron to turn the web
application into a desktop application. React is an
open-source framework created by Meta. React-
based applications can be used as PWAs (Progressive
Web Applications) (Biørn-Hansen et al., 2017).
Electron is used to transform the web application into
a desktop application. It runs on top of chromium and
the Node V8 motor. Electron is an open-source
project and has been used for popular applications
such as Microsoft Teams, Figma, or even VsCode. In
order to use this user interface, the user must first be
authenticated to the server. The user can then see
information about future interventions and their
general goals, as well as edit data about the ones they
are a part of. Thanks to a novel modulable system
based on components, it is possible to connect to a
robotic system from the interface and control it in real
time. Fully automated systems can be monitored
using the same modulable interface. It is possible to
navigate through the interface and operate in real-
time on a real-time system using a keyboard, mouse,
or controller. The customization of the interface has
been pushed so the user can assign key bindings to
actions for more rapidity. Finally, a visual scripting
framework has been implemented to enable the
creation of robot behaviours using the Neutron API.
3.3.1 Authentication
The authentication view is the first page that the user
sees. It is possible to both sign in and register from
this page. A user who has just created an account must
verify it via mail for it to become active. Because the
administrator may have retrained the account creation
to a domain, this verification ensures that the user is
a member of the organization. During a connection,
the software can be set to remember the credentials.
During log in, the software will request that the server
generates or refreshes the token that will be used to
connect to a robotic solution and verify that the user
is not a foreign client. A pop-up will appear if the user
is unable to access the server because the token has
expired.
3.3.2 Operation Overview
The Neutron GUI's home page is a dashboard that
displays information to the user such as a calendar
that notifies them of upcoming robotic interventions,
charts that provide information about a task's general
objective, and a list of possible connections to a
robotic system via a direct connection or a
customized one created from a configuration file. A
mission editor is included in the interface for directly
planning the prerequisites, objectives, and general
procedure of a robotic intervention. Multiple users
can be assigned to a mission. They will have access
to its details and will receive the required information
for its successful realization once it is completed. A
mission is a recurring or one-time task that may be
broken down into phases and completed by a system
user under particular conditions. The manipulation
and installation of equipment at a remote location, for
example, is a task that would be manually confirmed
by the individuals in charge of this stage. The data
gathered during the robotic intervention might
subsequently be utilized to confirm a second mission
task autonomously. Missions may be set up to require
specified materials, to be defined by a specific date or
a range of dates, and to include attachments like
pictures or PDFs. Mission information is saved on the
Web based User Interface Solution for Remote Robotic Control and Monitoring Autonomous System
683

server and synced in real time among all users. It is
possible to send a notification by mail to the parties
involved when a modification is made to an existing
mission.
3.3.3 Control and Supervision
From the dashboard, it is possible to open the robot
connection menu. Users can connect using a standard
configuration, a custom one, or by creating a
connection from this view. A standard configuration
handles the connection to a robotic system that is
referenced by the server in the database. Those would
generally be production ready and display
information such as status, location, battery level, and
information about the component mounted on them.
Custom configurations are used in situations when the
user wants to connect to a specific part of the robotic
system using a different protocol or communication
layer. This great level of customization for the
connection to a robotic system is useful for
development and testing purposes.
The real-time control and monitoring user
interface is a set of adaptable, configurable, and
interchangeable components. When a connection
with a robotic system is made, the software will load
the pre-defined components that will handle every
functionality of the robotic system. Components can
be used to visualize data received by the server or
stored in a database or execute actions in the robotic
system in real-time. All the components rely on the
same basis: a component can be opened, closed,
reduced, dragged and resized according to some limit.
A component can be configured to match the needs of
its present application as closely as practicable. It is
possible that different components cover the same
functionality, but that does not imply that they will all
be shown. Each component can be used in the way
that the user wants. It is their responsibility to create
the UI that fully satisfies the requirements. A
configuration file can be used to save component
selections, positions, and settings. This configuration
can be loaded by a user to obtain the exact same
interface setup. In order to improve the user
experience, components also attach their actions to an
input handler. The aspects and functionalities of a
component will vary depending on its own size, the
selected input handler, the mounted plugins, and the
ability of the computer to access the Internet.
Components are classified into two types: active and
passive. When an active component is selected, key-
bindings are activated, allowing the user to operate a
real-time system with the best possible experience.
Selecting an active robot arm control component, for
example, would bind the direction of the joints to the
active input handler's selected key. A passive
component is mainly used to display information.
Figure 4: Multiple components are mounted in the real-time control view.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
684
However, passive components can display buttons
and inputs, but they will not bind keys to any actions.
In Figure 4, the Schunk Arm component and the
Robot Base component are active components. All
the other components present in the figure are
passive. Selecting the Schunk arm component will
highlight it to indicate that it is active. The Schunk
arm component will no longer be active if the user
selects the Robot base component, and the key that
was supposed to execute some action on this
component will be disabled. The RobotBase is the
only component that is highlighted and responds to
inputs. The trajectory component is a passive
component. It is possible to interact with this
component to run a pre-recorded trajectory on one of
the actuators available on the robotic system, but no
binding will take place. While hitting keys on the
input handler to conduct actions on the active
component, the user may interact with a passive
component.
3.3.4 Input Handlers
The Electron GUI supports a variety of input
handlers. A keyboard with a mouse or trackpad, an
Xbox or PS5 controller, or a handmade controller are
all possibilities. The commander design pattern
(Alexandrescu, 2001) is used in the software
architecture that handles user input. When a user
presses an input, the program looks for an action that
is associated with that input.
In this case, this action will be produced, perhaps
with parameters, and submitted to an action
dispatcher, who will carry it out. The program is built
to handle robotic operations with any input device
that is supported. The user may simply switch
between active and passive components without
using the mouse since the UI components can change
their look and bindings to the presently selected input
device.
3.3.5 Visual Scripting
The Neutron Library includes a system of visual
scripting (Figure 5). In the visual scripting view, users
can arrange and configure blocks to construct basic or
complicated programs that can subsequently be
utilized as components in the control view. Visual
scripting is a graphical way to manipulate objects and
behaviour in the Neutron GUI without writing code
from scratch. The logic is constructed by connecting
visual nodes, allowing users or programmers to
quickly develop intelligent and interactive systems.
Visual scripting makes the process of getting a
product from concept to production much faster and
easier. Loops and conditions (if, while, and, or, nor,
not...), math (additions, multiplications...), variables,
actions, events, and custom nodes are the six main
categories of basic visual nodes. The actions block
refers to an actual action inside the software, such as
sending a request to the robotic system or selecting a
different input handler. A script can then be exported
as a visual component or as a custom node that can be
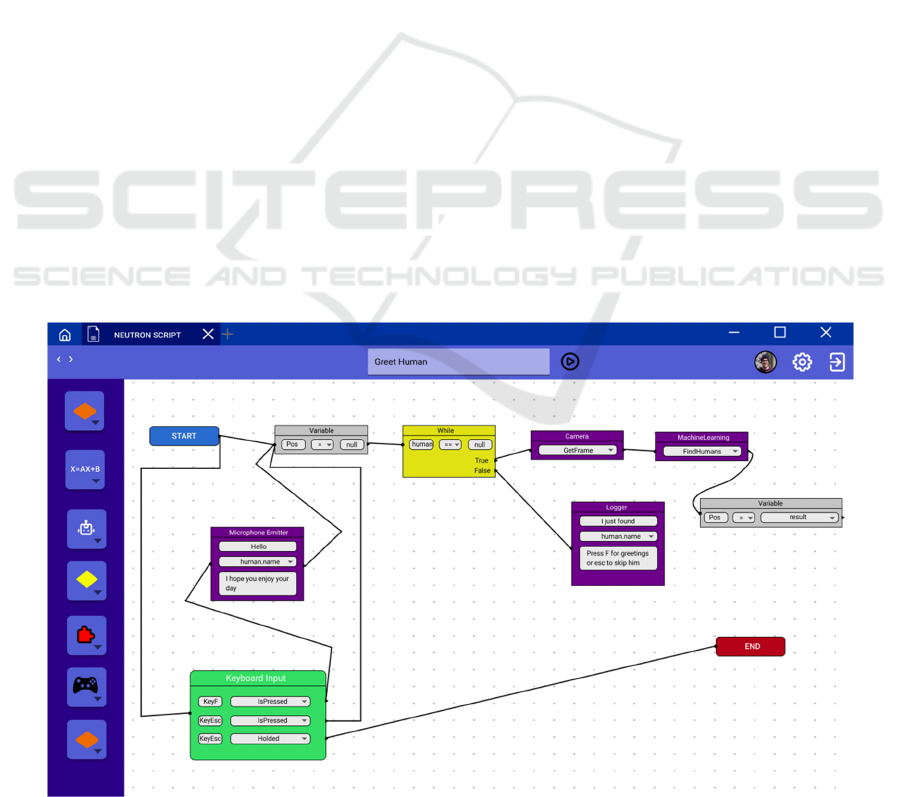
Figure 5: Implementation through visual scripting of the "Greet Humans" program.
Web based User Interface Solution for Remote Robotic Control and Monitoring Autonomous System
685

reused in another script. When two nodes are
connected directly, the second node receives the prior
node's output value as input. Users do not need to
assign and parse each output into a variable before
reprocessing it into a second node since the system
has been created that way. It is possible to assign the
output, or a portion of the output, to a variable in some
circumstances where this method is necessary. Every
script must be composed of at least one start and one
end node, defining the starting and ending points of
the script.
The visual script presented in Figure 5 works in
this way: The process begins on the "start" node. One
way is through the "Keyboard Input" node. This node
will register user input on a keyboard as events. When
one of those events occurs, the following node is
executed. A variable definition is the second block
connected by start. The value of the virtual variable
"human" is set to "null." It does imply that the
variable has been registered; it exists but has no value.
The flow immediately moves to a "While" node after
defining this variable. The criteria "human == null"
will be checked by this node. The nodes registered in
the "true" output will be performed when this
condition is true. Those nodes will request a camera
frame, run a remote machine learning algorithm to
recognize a person, and assign the algorithm's result
to the "Human" variable. The "machine learning"
node's output contains a JavaScript object, which is
assigned to the variable "human." The while loop will
cycle again if the "MachineLearning" node's output
fails to retrieve a human in the provided image.
Otherwise, the while loop will end, and the "logging"
node will fire, notifying the user. Heading back to the
Keyboard Input Node, if the key "F" is pressed on the
keyboard after a human has been detected, the
microphone mounted on the robotic system will speak
the text described in the node, then the variable will
be set to null again and the "while" node will restart,
as requested by the software. The welcome will not
be shown if the user pushes Esc. Finally, a lengthy
press of the Esc key will bring the script to the "End"
node, which will bring the entire visual scripting
program to a stop.
3.3.6 Fault Tolerant System
The process of controlling a robotic system can be
fraught with faults, timeouts, and delays. Some rules
have been created to provide the user with an
understanding of what is going on in order to promote
consistency. When a button-triggered action is in
progress, the button is disabled until the action is
finished. Furthermore, when the user needs to be
aware of an issue or an essential message, a pop-up
will display on the bottom right of the screen. In some
cases, the pop-up will require the user's
acknowledgement before it vanishes.
4 CONCLUSIONS
The proposed framework offers a scalable and highly
distributable solution for the real-time control of
robotic systems and for the monitoring of
autonomous systems. Users merely need to extract
the already used protocol, export it into the
framework, and configure the appropriate settings to
link this solution with an existing robotic solution.
The use of the framework will assist administrators
and operators from the planning stage to the
realization of a real-time intervention. Operators can
prepare for the intervention by customizing their user
interface or by creating scripts and plugins, ensuring
that the intervention is carried out under the best
conditions. The framework also allows for
autonomous system monitoring by customizing the
dashboard so that all essential information is provided
to the administrator, either on a screen installed on the
machine or remotely on a computer. All the data
collected by the program is centralized on a server to
simplify the process of data-driven enhancement of
the entire system and operator behaviour analysis.
REFERENCES
I-Scoop (Ed.). (2022, April 4). Industry 4.0 and the fourth
industrial revolution explained. I-SCOOP; www.i-
scoop.eu. https://www.i-scoop.eu/industry-4-0/
Eguchi, A. (2014, July). Robotics as a learning tool for
educational transformation. In Proceeding of 4th
international workshop teaching robotics, teaching with
robotics & 5th international conference robotics in
education Padova (Italy) (pp. 27-34).
Day, M. (2021, September 12). In Amazon’s
Flagship Fulfillment Center, the Machines Run
the Show. Bloomberg; www.bloomberg.com.
https://www.bloomberg.com/news/features/2021-09-
21/inside-amazon-amzn-flagship-fulfillment-center-
where-machines-run-the-show
Forrest, A., & Konca, M. (2007). Autonomous cars and
society. Worcester Polytechnic Institute, 15, 23
Katz, D., & Some, R. (2003). NASA advances robotic
space exploration. Computer, 36(1), 52-61.
Di Castro, M., Ferre, M., & Masi, A. (2018).
CERNTAURO: A Modular Architecture for Robotic
Inspection and Telemanipulation in Harsh and Semi-
Structured Environments. IEEE Access, 6, 37506-
37522.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
686

Davis, D., Burry, J., & Burry, M. (2011). Understanding
Visual Scripts: Improving Collaboration through
Modular Programming. International Journal of
Architectural Computing, 9(4), 361–375.
https://doi.org/10.1260/1478-0771.9.4.361
Li, L., Chou, W., Zhou, W., & Luo, M. (2016). Design
Patterns and Extensibility of REST API for Networking
Applications. IEEE Transactions on Network and
Service Management, 13, 154-167.
Kredpattanakul, Y. (2019). Transforming JavaScript-Based
Web Application to Cross-Platform Desktop with
Electron. In Information Science and Applications 2018
(pp. 571–579). Springer Singapore.
Cabi, S., Colmenarejo, S. G., Novikov, A., Konyushkova,
K., Reed, S., Jeong, R., ... & Wang, Z. (2019). A
framework for data-driven robotics. arXiv preprint
arXiv:1909.12200.
Frost, B. (2016). Atomic Design. Brad Frost Web.
Fourie, D., Claassens, S., Pillai, S., Mata, R., & Leonard, J.
(2017). SLAMinDB: Centralized graph databases for
mobile robotics. In Book title is required! (pp. 6331-
6337).
Mahmood, K., & Risch, T. (2021). Scalable Real-Time
Analytics for IoT Applications. In 2021 IEEE
International Conference on Smart Computing
(SMARTCOMP) (pp. 404-406).
Alves, V., & Borba, P. (2002). Distributed Adapters
Pattern: A Design Pattern for Object-Oriented
Distributed Applications.
Chatley, R., Eisenbach, S., & Magee, J. (2003). Painless
plugins. London: Imperial College.
Biørn-Hansen, A., Majchrzak, T. A., & Grønli, T. M. (2017,
April). Progressive web apps for the unified
development of mobile applications. In International
Conference on Web Information Systems and
Technologies (pp. 64-86). Springer, Cham.
Alexandrescu, A. (2001). Modern C++ design: generic
programming and design patterns applied. Addison-
Wesley.
Web based User Interface Solution for Remote Robotic Control and Monitoring Autonomous System
687
