
STIFS: Spatio-Temporal Input Frame Selection for Learning-based
Video Super-Resolution Models
Arbind Agrahari Baniya
a
, Tsz-Kwan Lee
b
, Peter W. Eklund
c
and Sunil Aryal
d
School of IT, Deakin University, Geelong, VIC, Australia
Keywords:
High Definition Video, Image Analysis, Image Quality, Video Signal Processing, Super-resolution.
Abstract:
Deep learning Video Super-Resolution (VSR) methods rely on learning spatio-temporal correlations between
a target frame and its neighbouring frames in a given temporal radius to generate a high-resolution output.
Among recent VSR models, a sliding window mechanism is popularly adopted by picking a fixed number of
consecutive frames as neighbouring frames for a given target frame. This results in a single frame being used
multiple times in the input space during the super-resolution process. Moreover, the approach of adopting
the fixed consecutive frames directly does not allow deep learning models to learn the full extent of spatio-
temporal inter-dependencies between a target frame and its neighbours along a video sequence. To mitigate
these issues, this paper proposes a Spatio-Temporal Input Frame Selection (STIFS) algorithm based on image
analysis to adaptively select the neighbouring frame(s) based on the spatio-temporal context dynamics with
respect to the target frame. STIFS is first-ever dynamic selection mechanism proposed for VSR methods.
It aims to enable VSR models to better learn spatio-temporal correlations in a given temporal radius and
consequently maximise the quality of the high-definition output. The proposed STIFS algorithm achieved
remarkable PSNR improvements in the high-resolution output for VSR models on benchmark datasets.
1 INTRODUCTION
Super-Resolution for generating high-resolution vi-
suals from low-resolution inputs is a classic prob-
lem in computer vision domain. Its initial solu-
tion was provided by Image Super-Resolution (ISR)
which only utilises spatial information of a single im-
age or multiple discrete images to produce fundamen-
tal visual quality improvement (Wang et al., 2020;
Arefin et al., 2020). Extending the target resolving
subject from image to video signals, applying the
super-resolution approaches used in conventional ISR
to Video Super-Resolution (VSR) fails to capture the
unique temporal information present in videos (Liang
et al., 2020; Liu et al., 2021). VSR aims to adopt
several temporally correlated low-resolution frames
within a video sequence to super-resolve the frame
series. The cross-consideration of spatial and tempo-
ral dimensions across multiple input frames has in-
duced a highly non-linear multi-dimensional problem
a
https://orcid.org/0000-0002-9359-6506
b
https://orcid.org/0000-0003-4176-2215
c
https://orcid.org/0000-0003-2313-8603
d
https://orcid.org/0000-0002-6639-6824
to tackle.
In recent years, Deep Neural Networks (DNN)
have been widely adopted in the VSR domain to
leverage highly non-linear multi-dimensional charac-
teristics and features in the input video frames and
have shown some promising results (Liu et al., 2020).
Other learning-based VSR approaches (Haris et al.,
2019; Wang et al., 2019b; Jo et al., 2018; Bao et al.,
2021; Tian et al., 2020; Isobe et al., 2020b; Chan
et al., 2021; Isobe et al., 2020a) utilise temporal in-
formation in a video as a learning feature followed
by stages of frame alignment and fusion to recon-
struct and up-sample the resultant pixels. However,
their commonly adopted frame alignment techniques,
traditional Motion Estimation and Motion Compensa-
tion (MEMC) approach using optical flow and warp-
ing (Chan et al., 2021), or modern machine learn-
ing technologies such as deformable convolution (Dai
et al., 2017) may not effectively align multiple frames
correctly for accurate fusion and reconstruction (Liu
et al., 2020). Therefore, 2D/3D and recurrent convo-
lutions have been used to learn the inter-frame cor-
relation without any implicit or explicit frame align-
ment.
To reveal inter-frame correlation along a video se-
48
Agrahari Baniya, A., Lee, T., Eklund, P. and Aryal, S.
STIFS: Spatio-Temporal Input Frame Selection for Learning-based Video Super-Resolution Models.
DOI: 10.5220/0011339900003289
In Proceedings of the 19th International Conference on Signal Processing and Multimedia Applications (SIGMAP 2022), pages 48-58
ISBN: 978-989-758-591-3; ISSN: 2184-9471
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

quence without any implicit or explicit frame align-
ment, the input frames adopted to be learned is com-
monly based on a sliding window mechanism includ-
ing n consecutive frames from either past and/or fu-
ture timestamps to the target frame (Sajjadi et al.,
2018). Most VSR models using a sliding-window
mechanism treat all neighbouring input frames as
equally important without rank or selection. How-
ever, each neighbouring frame in a sliding window
may express a different correlation because of the
context changes across the time domain. Thus, a
fixed selection of n consecutive frame(s) from the tar-
get frame in a sliding window may not be optimal
for learning spatio-temporal correlation (Wang et al.,
2019b).
In this work we propose to address these gaps with
three-fold contributions highlighted as follows:
1. To leverage a VSR result from an optimal in-
put space, we propose a novel pre-processing
technique which adaptively ranks and selects the
neighbouring frames from bidirectional temporal
dimensions to be included in the sliding window
input space based on a spatio-temporal ranking al-
gorithm, rather than simply selecting the nearest n
consecutive frames from the target frame.
2. The proposed Spatio-Temporal Input Frame Se-
lection (STIFS) algorithm induces a strategic
correlation-based discrepancy among the neigh-
bouring frames to enable selection of the most
highly correlated reference frames from bidirec-
tional temporal dimensions for super-resolving
the target frame.
3. Finally, this work explores the impact and effec-
tiveness of applying an input selection algorithm
for machine learning based VSR model.
To our knowledge, this is the first work of its kind
that introduces an adaptive selection algorithm with
the objective of optimising the input space to aid VSR
models to learn better spatio-temporal correlations in
VSR and consequently improve the quality of high-
resolution outputs.
2 BACKGROUND
2.1 Trade-off with and without Frame
Alignment in VSR
Using frame alignment in VSR, MEMC (Haris et al.,
2019; Bao et al., 2021; Haris et al., 2020; Xue et al.,
2019) remains challenging, particularly when inter-
frame motion is large, or when there is luminance
variance across frames (Hung et al., 2019). Alter-
natively, deformable convolutions proposed by Dai
et al. (Dai et al., 2017) has been used for frame
alignment by enhancing DNN’s capacity to model the
transformation of geometric variations of objects. Al-
though deformable convolution is tolerant to variance
in luminance or motion, it involves higher computa-
tional overhead (Tian et al., 2020; Wang et al., 2019a;
Wang et al., 2019b). Recently, more VSR methods
have been proposing to not rely on frame alignment
techniques to alleviate the above-mentioned limita-
tions. These methods promote 2D convolution (Lu-
cas et al., 2019), 3D convolution (Jo et al., 2018;
Kim et al., 2018), or Recurrent Convolution Network
(RCN) (Isobe et al., 2020c; Zhu et al., 2019) to exploit
spatial or spatio-temporal information in a video.
Most VSR models simply use a fixed set of n con-
secutive frames for super-resolution a whole video,
some recent methods have introduced variations of
the learning network architecture to extract different
features from the given n consecutive frames attempt-
ing to capture the unique temporal characteristics be-
tween video frames. Enhanced Deformable Convolu-
tion Networks (EDVR) (Wang et al., 2019b) makes
use of a Temporal-Spatial Attention (TSA) mecha-
nism where convolution-based similarity distance is
used to generate temporal attention maps in element-
wise multiplication with the original feature maps of
the frame and compute a spatial attention mask by a
fusion process. Even incorporated with such complex
components like TSA, the information feed in via in-
put frames to these models remains the same. This
implies that the learning by the model is only relied
on the same inputs to map low-resolution frames to a
higher resolution output, even the operations applied
to extract features from the input might vary.
Based on the literature, it is manifest that it
lacks mechanism to effectively select the input frames
for either alignment-based models or non-alignment
based models. Non-frame alignment models suffer
more from redundancy in the input space, with the ex-
ception of RCN-based models, which commonly use
one consecutive frame in addition to the target frame
and the hidden state propagated from super-resolving
frames from past timestamps. Two of the non-frame
alignment-based methods are VSRResFeatGAN (Lu-
cas et al., 2019) and Dynamic Upsampling Filters
(DUF) (Jo et al., 2018), which use 2D and 3D con-
volution respectively. Both methods make use of a
sliding window mechanism to select n frames from
both past and future temporal dimensions and rely on
2D convolution to extract the spatial correlation, and
3D convolution to extract the spatio-temporal correla-
tion respectively. However, such an approach has still
STIFS: Spatio-Temporal Input Frame Selection for Learning-based Video Super-Resolution Models
49

led these models to use identical frames repeatedly,
compromising their super-resolution performance as
a result.
2.2 VSR Challenges
IconVSR (Chan et al., 2021) harnessed the sequen-
tial modelling ability of bidirectional recurrent neu-
ral networks in combination with MEMC to obtain
PSNR improvement of only 0.03 dB over the previ-
ously best performing model, EDVR (Wang et al.,
2019b) on Vimeo90k test set. This exemplifies the
challenges in improving performance of existing VSR
models. Interesting to mention is the extent of the
changes made to the model to obtain this meagre im-
provement. Similarly, despite the complexity of the
model proposed, the recent BasicVSR model is only
able to improve the PSNR on Vid4 by 0.04 dB com-
pared to the previously best performing model Recur-
rent Structure-Detail Network (RSDN) (Isobe et al.,
2020a). RSDN in turn was only able to improve the
super-resolution outcome on Vid4, in PSNR terms, by
0.07 dB compared to the EDVR model, the best per-
forming model preceding RSDN. Although the evalu-
ation of new VSR models is beyond the scope of this
paper, our intention with this discussion is to demon-
strate the fierce competition in VSR research space,
and the relatively small gains, achieved via modelling
and addressing the complex problem of video super-
resolution.
Our literature study concludes that, although lim-
ited attempts have been made to treat frames at differ-
ent timestamps differently in some frame alignment-
based methods, no work has been proposed to effec-
tively select the input space itself in both categories
of models, despite the hypothesis that such an ap-
proach will likely decrease redundancy in the feature
space, and may achieve improved super-resolution
outcomes, especially for non-frame-alignment based
VSR models. At the same time, it is hypothesised that
selecting the most relevant input space will improve
VSR results at lower computational cost compared to
models which add learnable parameters to differenti-
ate between input frames. The remainder of this paper
is organised as follows. The design of our proposed
algorithm for selecting frames in the input space is
presented in Section 3, the methodology is explained
in Section 4, the results are evaluated in Section 5,
Conclusions are drawn in Section 6.
3 PROPOSED ALGORITHM AND
ITS ANALYSIS
3.1 The STIFS Algorithm
To mitigate the shortcomings of current VSR mod-
els, our novel Spatio-Temporal Input Frame Selec-
tion (STIFS) algorithm makes use of the frame-
wise spatio-temporal correlation between neighbour-
ing frames and the target frame to capture their re-
lationship in the input space to a VSR network.
The frame-wise spatio-temporal correlation com-
prises spatial difference and temporal difference be-
tween frames. To compute the spatial difference, we
make use of Mean Pixel Value Difference (MPVD)
between the target frame F
t
and the neighbouring
frame F
t+i
, where i ∈ {± 1, ··· , ± 2s + 1}, (2s + 1
is the number of frames in the selection window), de-
fined as,
MPVD(F
t
, F
t+i
) =
1
h × w
h×w
∑
j=1
kp
j
(F
t
) − p
j
(F
t+i
)k
(1)
where h and w are the height and width of the frames
in terms of pixels, respectively; p
j
(·) is the value of
j
th
pixel of a given frame.
The temporal component of the spatio-temporal
correlation is the Temporal Distance (TD) between a
target frame F
t
and neighbour F
t+i
calculated as,
TD(F
t
, F
t+i
) = kik. (2)
The rank score for each frame F
t+i
in the neigh-
bouring space of target frame F
t
is then computed as,
r(F
t+i
) =
MPVD(F
t
, F
t+i
)
TD(F
t
, F
t+i
)
. (3)
The STIFS algorithm then uses the rank scores of
neighbouring frames to select s frames from 2s + 1
frames, either side of the target frame F
t
(past and fu-
ture), resulting in a total of 2s+1 (including 2s neigh-
bours and F
t
itself) frames as input to super-resolve
the target frame F
t
. The overall algorithm for the
frame selection to an input space of a VSR model
for a given video sequence with the total number of
frames f , where each frame is of size h × w, is pre-
sented in Algorithm 1. Based on our proposed STIFS
Algorithm 1, the selection is repeated for each target
frame F
t
in a video sequence, finally giving an input
space of size 2s + 1 for each target frame F
t
. It selects
neighbouring frames by ranking them while captur-
ing both spatial and temporal correlation between F
t
and each neighbouring frame F
t
+ i. The result is an
SIGMAP 2022 - 19th International Conference on Signal Processing and Multimedia Applications
50
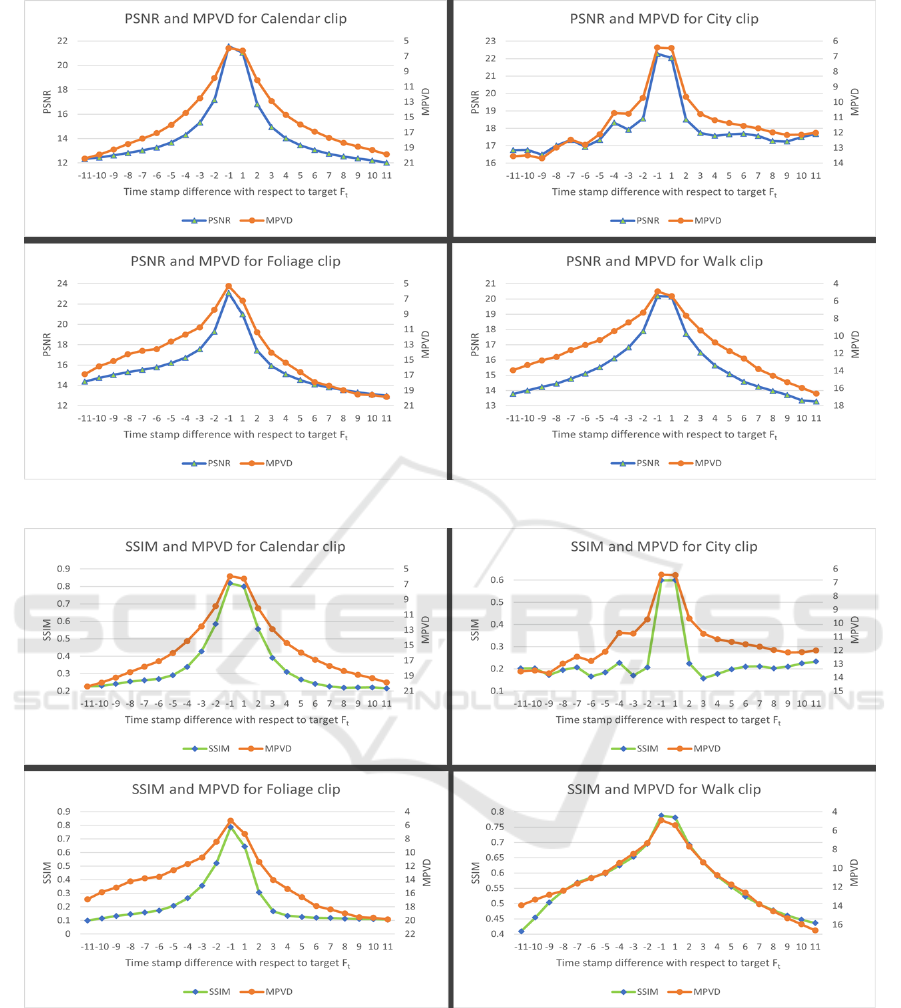
(a) PSNR and MPVD correlation in 4 clips of Vid4 Dataset
(b) SSIM and MPVD correlation in 4 clips of Vid4 Dataset
Figure 1: PSNR, SSIM and MPVD Correlation between target frame F
t
, where t = 12 and its 11 neighbours in each temporal
direction in 4 clips of the benchmark Vid4 Dataset.
input space to a VSR model is formed by appending
the selected frames with higher spatial and temporal
correlation with respect to the target frame.
3.2 Analysis of Selection Measures in
STIFS
To understand the intuition behind using MPVD
based selection, we perform frame-to-frame compar-
STIFS: Spatio-Temporal Input Frame Selection for Learning-based Video Super-Resolution Models
51

Algorithm 1: STIFS Algorithm.
Result: Sliding window of size 2s + 1 frames for
each target frame F
t
Initialisation: future score = [], past score = [],
input = [] ;
i ← 1;
while i < 2s + 1 do
MPVD(F
t
, F
t+i
) using eqn. (1);
TD(F
t
, F
t+i
) using eqn. (2);
r(F
t+i
) using eqn. (3);
future score.append(r(F
t+i
));
i = i + 1;
future score.sort descending();
i ← −1;
while i > −(2s + 1) do
MPVD(F
t
, F
t+i
) using eqn. (1);
TD(F
t
, F
t+i
) using eqn. (2) ;
r(F
t+i
) using eqn. (3);
past score.append(r(F
t+i
));
i = i − 1;
past score.sort descending();
i ← −1;
while i > −(2s + 1) do
if r(F
t+i
) in past score[:s] then
input.append(F
t+i
);
i = i − 1;
input.append(F
t
);
i ← 1;
while i < 2s + 1 do
if r(F
t+i
) in future score[:s] then
input.append(F
t+i
);
i = i + 1;
ison between example target frames and its neigh-
bours. Well-known image/frame comparison matri-
ces namely PSNR and SSIM are computed between
a target frame F
t
and its 2s + 1 neighbours in each
temporal direction for all the four clips of the Vid4
dataset. For this analysis we consider F
t
, where t = 12
as target frame, and its 11 neighbours in each tem-
poral direction. From the graphs shown in Fig. 1a
and Fig. 1b it is evident that MPVD is highly corre-
lated with both PSNR and SSIM, justifying the abil-
ity of MPVD to capture similarity/difference between
frames, and therefore for it to be used as a selection
metric.
However, unlike PSNR and SSIM, MPVD has
significantly lower computation cost resulting in less
time taken to compute rank score as shown in Table 1.
Since the selection of neighbouring frames for a given
target frame in VSR is to be done repeatedly using a
sliding window over the entire video, it is crucial to
consider the cost associated with such selection. It is
evident from Table 1 that the time taken to compute
rank score is about 83% less on average compared to
Figure 2: Comparison between spatial and spatio-temporal
selection. The dashed bounding box represents frame se-
lection based on spatial metric (MPVD) alone. The solid
bounding box represents frame selection based on spatio-
temporal metric (MPVD/TD).
PSNR computation for the same number of frames,
making rank score the most suitable ranking measure
for STIFS.
Table 1: Time taken in seconds to compute PSNR, SSIM
and Rank Score between target frame F
t
,t = 12 and its 11
neighbours in each temporal direction in 4 clips of Vid4
Dataset.
Clip Name PSNR
Time(s)
SSIM
Time(s)
Rank
Score
Time(s)
Computational
Reduction(%)
by Rank Score
over PSNR
Calendar 0.0130 0.6173 0.0027 79.32
City 0.0136 0.5959 0.0023 83.09
Foliage 0.0113 0.4599 0.0016 85.84
Walk 0.0119 0.4832 0.0018 84.87
Avg. 0.0125 0.5391 0.0021 83.28
Furthermore, consideration of only a spatial com-
parison between frames for selection does not con-
sider the actual spatio-temporal inter-dependencies
among video frames. As shown in Fig. 2, if we are
to consider selection of s = 5 out of 2s + 1 = 11 past
frames with reference to target frame F
t
, where t = 12
for the City clip, based on spatial metric MPVD only,
the most distant 5 frames from the target frame are
selected because they exhibit the largest spatial dif-
ferences, as highlighted by dotted bounding box in
Fig. 2. However, when Temporal Distance (TD) is
considered, the most distant frames rank lowest de-
spite having the largest MPVD with F
t
and thus, the
nearest 5 frames are selected, as highlighted by solid
bounding box in Fig. 2. Considering spatial dimen-
sion alone inverts the VSR to MISR, which is undesir-
able. To capture true spatio-temporal interdependence
between the target and its neighbours both spatial and
temporal dimensions must be considered.
SIGMAP 2022 - 19th International Conference on Signal Processing and Multimedia Applications
52

4 METHODOLOGY
We apply the proposed STIFS algorithm to establish
a highly correlated input space to super-resolve video
clips in three widely used benchmark VSR datasets,
namely Vid4 (Liu and Sun, 2013), SPMCS (Tao
et al., 2017) and Vimeo90k (Xue et al., 2019). For
the purpose of super-resolution, we have considered
three different VSR models that include both frame-
alignment and non-frame alignment-based methods,
to show the diverse applicability of the proposed al-
gorithm. Two out of the three models are non-frame
alignment models (designed by us) for simulation of
real-world VSR models based on 2D convolutions.
The two simulation models differ in the number of in-
put frames used to show the different impact of STIFS
when selecting from a smaller or larger temporal ra-
dius. The third model is the RBPN model (Haris et al.,
2019), widely used for comparison in the VSR liter-
ature since 2019, as it was one of the best perform-
ing models in benchmark VSR competition NTIRE
2019 (Nah et al., 2019). The experimentation on each
of these models varies in terms of the sliding window
size and the deep learning model architecture used in
order to show different emergent features in training
and testing.
4.1 Simulation Models
The first VSR model (Simulation Model-1) is con-
structed with 2D convolutions with residual blocks
and is shown in Fig. 3. It uses three frame inputs to
super resolve a frame from its low-resolution frame
F
t
to the high-resolution result frame F
t
× 4. To do
so, one of the three frames is selected in each direc-
tion based on the STIFS algorithm resulting in three
low-resolution input frames including F
t−1
, F
t
, and
F
t+1
. These low-resolution input frames are gener-
ated by synthetically downsampling the ground-truth
by 4× using the bicubic downsampling technique. A
2D convolution operation with kernel of size 3 × 3 is
then applied on each input frame resulting in 64 fea-
tures from each input frame which are concatenated
and subjected to another convolution with kernel of
size 3 × 3. The 256 features extracted from the previ-
ous steps are passed through 5 residual blocks, where
each residual block consists of a convolution opera-
tion with kernels of size 3× 3, a Rectified Linear Unit
(ReLU) layer, and an additional convolution opera-
tion identical to the first. The 256 features obtained
after the final residual block is then subject to a con-
volution operation with kernels of size 3× 3 to extract
48 features followed by pixel shuffling to perform a
depth-to-space transformation. This is then concate-
nated with the 4× bilinearly upsampled target input
frame to obtain a ×4 spatially super-resolved frame.
This model is used to demonstrate the impact of the
proposed STIFS algorithm with window size three,
compared to the same VSR model without STIFS.
Fig. 4 illustrates the second VSR model for simu-
lation (Simulation Model-2). Similar to Simulation
Model-1, Simulation Model-2 adopts 2D convolu-
tions with residual blocks but in this case with four
neighbouring frames to super resolve the target frame
F
t
. To maintain a sliding window of five frames, two
frames respectively from both temporal-directions are
selected. The 2D convolution operation with kernel of
size 3 × 3 is applied on each input frame resulting in
320 total feature maps, concatenated and subjected to
another convolution with kernel of size 3×3 to extract
128 features. While the kernel size remains the same
in each convolution for extracting the features, Sim-
ulation Model-2 involves larger input data volumes
such that the following convolution processes are con-
ducted by kernels with more nodes for the model to
handle a higher complexity problem, compared to that
in Fig. 3. As shown in Fig. 4, the feature maps are
then passed through five residual blocks, each com-
prised of a convolution operation with 128 nodes fol-
lowed by a ReLu layer and an additional convolution
operation identical to the first. Afterwards, a convo-
lution with 48 nodes is performed followed by pixel
shuffling resulting in depth-to-space transformation.
This is then concatenated with the 4× bilinearly up-
sampled target input frame to obtain a ×4 spatially
super-resolved frame. This model is further used
for verifying the impact of the proposed STIFS al-
gorithm, compared to the same VSR model without
the STIFS algorithm, with a sliding window of five
frames.
For the purpose of training, the Vimeo90k (Xue
et al., 2019) training set is used. Training is per-
formed for 30 epochs each of the 4 models (the 2
models × 2 ways of selecting input). Each VSR
simulation training uses L1 loss and Adam optimiza-
tion. The batch size is fixed to 16 and a learning
rate of 0.0001 is used. The code is implemented
using PyTorch (Paszke et al., 2019). To test these
models, the Vid4 dataset (Liu and Sun, 2013) and
Vimeo90k test set (Wang et al., 2019b) is used and
the performance of the each simulation model is mea-
sured in terms of Peak Signal-to-Noise Ratio (PSNR)
and Structural Similarity Index Measure (SSIM) com-
pared with (and without) the use of the proposed al-
gorithm.
STIFS: Spatio-Temporal Input Frame Selection for Learning-based Video Super-Resolution Models
53
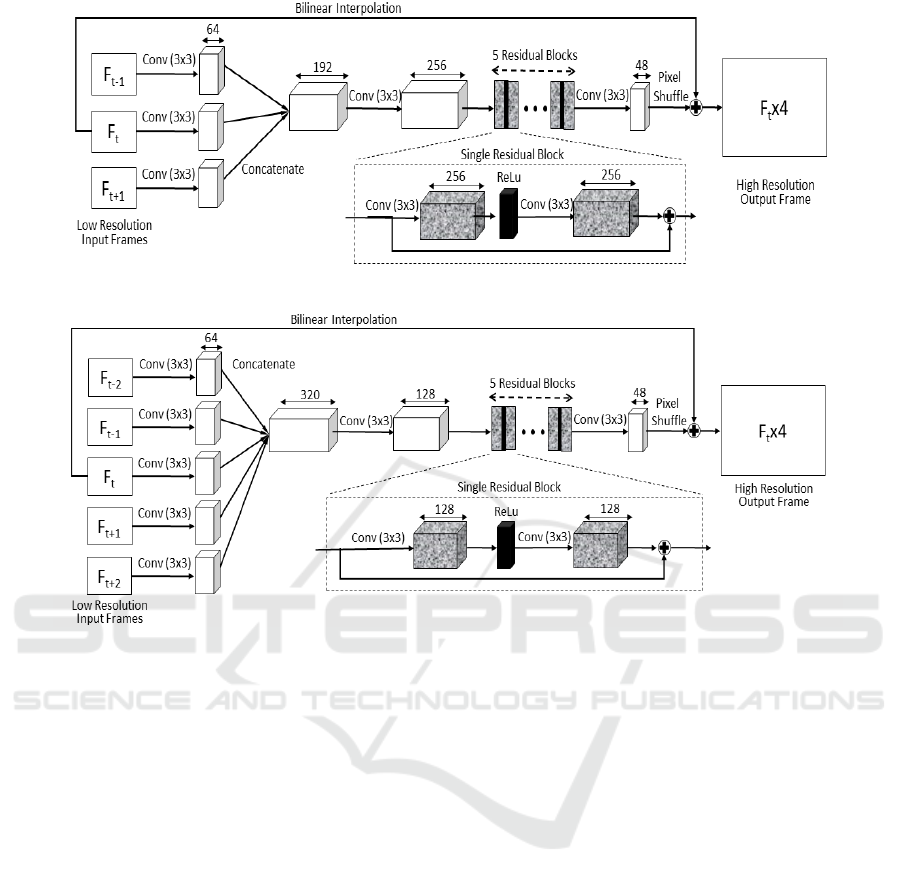
Figure 3: Simulation Model-1 architecture with three input frames.
Figure 4: Simulation Model-2 architecture with five input frames.
4.2 RBPN Model
To evaluate the impact of the STIFS algorithm on
benchmark methods, RBPN (Haris et al., 2019) was
considered. Given that the model was originally
trained using 7 frame sequences, in order to apply
STIFS in the training phase we would need a training
dataset with video sequences of at least (2 × 7) + 1 =
15 frames. However, the Vimeo90k dataset only con-
tains 7 frames in each sequence, therefore we can-
not perform the retraining of RBPN compared to the
STIFS algorithm. Some more recent datasets, such
as REDS (Nah et al., 2019), could be used but this
would not allow us to conduct a fair baseline compar-
ison with the published RBPN, trained on Vimeo90k,
a much larger and diverse dataset compared to REDS.
Nevertheless, we applied the STIFS algorithm dur-
ing the test phase alone while using the pre-trained
model published by the RBPN authors. The test-
ing, with (and without) STIFS, is done on Vid4 and
SPMCS datasets, as was done in the original RBPN
work. For the purpose of testing, we selected 7 frames
from 15 frames in consecutive sequence, including 3
past and 3 future frames along with one target frame.
The model architecture and down-sampling of origi-
nal frames is conducted in exactly the same way as
the original RBPN work. For a fair comparison in the
testing, we keep the sliding window to a fixed size of
7, as adopted in the original RBPN work.
5 EMPIRICAL EVALUATION
RESULTS
In this paper, we evaluate the effectiveness of the pro-
posed STIFS algorithm compared to a scenario with-
out any selection mechanism in three different cases:
1. Simulation Model-1: the case with three frame in-
puts trained on Vimeo90k train set and tested on
Vid4 and Vimeo90k test set. STIFS was applied
at both train and test phase.
2. Simulation Model-2: the case with five frame in-
puts trained on Vimeo90k train set and tested on
Vid4 and Vimeo90k test set. STIFS was applied
at both train and test phase
3. A pre-trained RBPN model with seven frame in-
puts tested on SPMCS and Vid4 dataset. STIFS
was applied at test phase only.
SIGMAP 2022 - 19th International Conference on Signal Processing and Multimedia Applications
54

5.1 Simulation Model-1 with/without
the STIFS Algorithm
Simulation Model-1 in Fig. 3 with three inputs is
trained on the Vimeo90k and tested on the Vid4
dataset. As shown in Table 2, PSNR/SSIM is
computed to evaluate the VSR outcome on each
clip in the Vid4 dataset. This demonstrates that
PSNR/SSIM results are improved when the STIFS
algorithm is applied. The selection resulted in an
overall PSNR/SSIM improvement of 0.22/0.01 on the
Vid4 dataset which records the improvement resulting
from applying the STIFS algorithm.
We further evaluated Simulation Model-1 on the
Vimeo90k test set which contains 7,824 diverse clips
from the real-world. Similar to the test we performed
on Vid4, to super-resolve the fourth frame in the each
of the septuplet clips, a three-frame sequence is used
with one neighbour in each direction (along with the
target frame). For no-selection, the third and fifth
frames are used, as these are the immediate consec-
utive frames to the fourth frame. For selection, one
out of the three frames is selected in each direction,
based on the STIFS algorithm proposed. As shown
in Table 2, even on a diverse test set like Vimeo90k,
the use of the STIFS algorithm resulted in superior
outcomes compared to no selection at all. The ob-
served improvement is 0.05 dB for PSNR, a signif-
icant improvement in VSR research as discussed in
Section 2.2.
5.2 Simulation Model-2 with/without
the STIFS Algorithm
Simulation Model-2 is trained as depicted in Fig. 4
with five frame input sequences with (and with-
out) the STIFS algorithm on the Vimeo90k train
dataset. The trained models are tested on the Vid4
and Vimeo90k test datasets. It is important to note
that Simulation Model-2 was trained to select 2 out
of 3 frames in each temporal direction, because of 7
frames limitation of Vimeo90k clips.
As shown in Table 2, even with the training lim-
itations, PSNR results are improved when the STIFS
algorithm is used for each of the clips in Vid4. We
observed a maximum improvement of up-to 0.95 dB
and overall improvement of 0.34 dB when using the
STIFS algorithm, compared to the baseline of no
frame selection at all. On the other hand, the limita-
tion of the temporal radius in the Vimeo90k dataset
1
Due to the limitations of 7 frame clips in Vimeo90k
dataset, 2 out of only available 3 frames were selected dur-
ing both training and testing .
bounds the flexibility of input space selection even
during the test phase. Thus, the improvement when
using the STIFS algorithm on Vimeo90k test set could
be even greater than what is reported but certainly not
worse.
PSNR improvements of 0.22 dB and 0.34 dB are
recorded on Vid4, using the STIFS algorithm with
Simulation Model-1 and Simulation Model-2 respec-
tively. Such improvements are considerable in the
context of contemporary VSR research. This signi-
fies improvement in the learning and modelling abil-
ity of a given VSR models when a spatio-temporal
metric is used to select highly correlated frames in the
input space. As discussed in Section 2.2, compared
to the improvements resulted by multiple component
changes in VSR models, the dominant methodology
followed in VSR research, our simpler, yet effective,
STIFS algorithm is able to improve super-resolution
quality significantly over its none-selective counter-
part.
5.3 RBPN with/without STIFS
Furthermore, to align our work with the VSR liter-
ature, we tested the STIFS algorithm on the RBPN
model (Haris et al., 2019). We have tested the pre-
trained model on the SPMCS and Vid4 datasets with
(and without) the STIFS algorithm for our third eval-
uation scenario. The eight clips selected from the
SPMCS dataset are identical to those provided in orig-
inal RBPN evaluation. As observed in Table 3, PSNR
is improved for 8 out of the 12 clips from SPMCS
and Vid4 dataset. Even though the proposed STIFS
algorithm was only applied at the test phase, it inter-
estingly resulted in the observed PSNR improvement
of 0.03dB in average. The original RBPN model is
trained using 7 frames sliding window, with 3 consec-
utive frames used from each temporal direction (along
with the target frame). While using the originally
trained model, we made changes at the test phase. We
performed two different tests, one with using 3 con-
secutive past and future neighbouring frames, i.e. no
selection mechanism, and the other using our STIFS
algorithm to select the 3 past, and future frames, from
7 frames in each direction. In both tests, the size of
sliding window remains constant allowing us to use
the originally trained RBPN with a 7-frame sliding
window. We also observed improvement in PSNR
outcomes for two clips, namely Calendar and City
from the Vid4 dataset, when the STIFS algorithm is
applied during the test phase alone, as observed in Ta-
ble 3. This comparison, alongside RBPN, shows the
effectiveness of STIFS even when applied only in the
test phase. The improvement is most likely to be en-
STIFS: Spatio-Temporal Input Frame Selection for Learning-based Video Super-Resolution Models
55
Table 2: Super-resolution results in terms of PSNR/SSIM on benchmark Vid4 and Vimeo90k test sets from VSR Simulation
Model-1 (3 Frames Selection) and Simulation Model -2 (5 Frames Selection) with/without the proposed STIFS algorithm
applied for both training and testing.
3 Frames Selection 5 Frames Selection
Clip Name w STIFS w/o STIFS w STIFS w/o STIFS
Calendar 16.47/0.47 15.98/0.46 16.99/0.47 16.04/0.46
City 23.73/0.59 23.67/0.59 23.71/0.59 23.61/0.59
Foliage 21.45/0.52 21.27/0.52 21.07/0.50 20.90/0.50
Walk 20.56/0.73 20.39/0.72 20.08/0.71 19.93/0.71
Avg. Vid4 20.55/0.58 20.33/0.57 20.46/0.57 20.12/0.57
Avg. Vimeo90k 24.57/0.82 24.52/0.82 24.33/0.81
1
24.33/0.81
hanced further when STIFS is applied during training,
as is evident from the outcomes from VSR Simulation
Model-1 and Simulation Model-2, where the STIFS
algorithm is used in both training as well as testing
phases.
5.4 Visual Comparison
To further highlight the impact of the STIFS algo-
rithm in the overall super-resolution task, we visually
compare the outcomes from Simulation Model-1 on
different video clips from Vid4. The images shown in
Fig. 5 prove that the super-resolution outcomes, not
only in spatial but also in temporal domain, signif-
icantly reduced artefacts and enhanced the finer de-
tails when applying the proposed STIFS algorithm
compared no selection at all. It further demonstrates
that the proposed STIFS algorithm is able to capture
the spatio-temporal correction and alleviate the error
propagation issue in VSR.
As highlighted with the red bounding box in each
of Fig. 5a, 5b, 5c, and 5d, the STIFS algorithm is able
to produce more correct pixels, with better defined
Table 3: Super-resolution results in terms of PSNR on
SPMCS and Vid4 from RBPN with/without the STIFS al-
gorithm — applied during test phase only.
Clip Name Dataset w STIFS
at test only
w/o STIFS
at train+test
hitachi isee5 001SPMCS 26.21 26.27
hdclub 003 001 SPMCS 21.95 21.88
hk004 001 SPMCS 33.34 33.33
jvc 009 001 SPMCS 30.06 29.99
NYVTG
006 SPMCS 33.34 33.17
HKVTG 004 SPMCS 29.51 29.50
veni3 011 SPMCS 36.32 36.35
veni5 015 SPMCS 33.01 32.99
Foliage Vid4 26.23 26.25
Walk Vid4 30.66 30.69
Calendar Vid4 23.93 23.91
City Vid4 27.55 27.53
Average 29.35 29.32
shapes and boundaries of objects compared to video
frames produced without using it. The difference is
also evident with the better defined colours and sig-
nificantly reduced artefacts in each frame. This pro-
vides further tangible, and easily identified, evidence
of STIFS’s effectiveness. Furthermore, it demon-
strated that STIFS, as an input selection algorithm,
is impactful and effective for achieving a better VSR
outcomes.
6 CONCLUDING REMARKS
This paper has proposed a novel input frame ranking
and selection algorithm for VSR models. The pro-
posed algorithm, STIFS has also revealed the impact
of optimal input selection at the architectural level of
a learning-based VSR model. It enables VSR neural
networks to better learn with spatio-temporal corre-
lation between frames in a given temporal radius of
the target frame. Through empirical evaluations on
benchmark datasets, the proposed STIFS algorithm
has demonstrated its effectiveness over existing slid-
ing window mechanisms. The performance of VSR
models can be improved by the proposed STIFS in-
corporating spatio-temporal metrics in input frame se-
lection. It has demonstrated in the resultant PSNR
improvements when using the STIFS algorithm sig-
nifies the importance and strong correlation of strate-
gic pixel-aware context-based selection in the input
space. The promising results delivered by the STIFS
algorithm place it as an adjunct technique that can be
adopted in conjunction with any VSR model in order
to enhance super-resolution performance while negli-
gible computational effort applies.
SIGMAP 2022 - 19th International Conference on Signal Processing and Multimedia Applications
56

(a) Frames 1, 2 and 3 of Calendar clip
(b) Frames 15, 16 and 17 of City clip
(c) Frames 16, 17 and 18 of Calendar clip
(d) Frames 1, 2 and 3 of Walk clip
Figure 5: Zoomed visual comparison of different frames from various clips of Vid4 dataset. Highlighted red boundary in each
frame highlights evident visual quality improvement when using the STIFS algorithm.
REFERENCES
Arefin, M. R., Michalski, V., St-Charles, P.-L., Kalaitzis, A.,
Kim, S., Kahou, S. E., and Bengio, Y. (2020). Multi-
image super-resolution for remote sensing using deep
recurrent networks. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion Workshops, pages 206–207.
Bao, W., Lai, W.-S., Zhang, X., Gao, Z., and Yang, M.-
H. (2021). Memc-net: Motion estimation and motion
compensation driven neural network for video inter-
polation and enhancement. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 43(3):933–
948.
Chan, K. C., Wang, X., Yu, K., Dong, C., and Loy, C. C.
(2021). Basicvsr: The search for essential components
in video super-resolution and beyond. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 4947–4956.
Dai, J., Qi, H., Xiong, Y., Li, Y., Zhang, G., Hu, H., and
Wei, Y. (2017). Deformable convolutional networks.
In Proceedings of the IEEE international conference
on computer vision, pages 764–773.
Haris, M., Shakhnarovich, G., and Ukita, N. (2019).
Recurrent back-projection network for video super-
resolution. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 3897–3906.
Haris, M., Shakhnarovich, G., and Ukita, N. (2020). Space-
time-aware multi-resolution video enhancement. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Hung, K.-W., Qiu, C., and Jiang, J. (2019). Video super res-
olution via deep global-aware network. IEEE Access,
7:74711–74720.
Isobe, T., Jia, X., Gu, S., Li, S., Wang, S., and Tian,
Q. (2020a). Video super-resolution with recurrent
structure-detail network. In Vedaldi, A., Bischof, H.,
Brox, T., and Frahm, J.-M., editors, Computer Vision
– ECCV 2020, pages 645–660, Cham. Springer Inter-
national Publishing.
Isobe, T., Li, S., Jia, X., Yuan, S., Slabaugh, G., Xu, C., Li,
Y.-L., Wang, S., and Tian, Q. (2020b). Video super-
resolution with temporal group attention. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR).
Isobe, T., Zhu, F., Jia, X., and Wang, S. (2020c). Revisiting
temporal modeling for video super-resolution. arXiv
preprint arXiv:2008.05765.
Jo, Y., Oh, S. W., Kang, J., and Kim, S. J. (2018). Deep
video super-resolution network using dynamic upsam-
pling filters without explicit motion compensation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3224–3232.
Kim, S. Y., Lim, J., Na, T., and Kim, M. (2018). 3dsrnet:
Video super-resolution using 3d convolutional neural
networks. arXiv preprint arXiv:1812.09079.
Liang, M., Du, J., Li, L., Xue, Z., Wang, X., Kou, F., and
Wang, X. (2020). Video super-resolution reconstruc-
tion based on deep learning and spatio-temporal fea-
ture self-similarity. IEEE Transactions on Knowledge
and Data Engineering, pages 1–1.
Liu, C. and Sun, D. (2013). On bayesian adaptive video su-
STIFS: Spatio-Temporal Input Frame Selection for Learning-based Video Super-Resolution Models
57

per resolution. IEEE transactions on pattern analysis
and machine intelligence, 36(2):346–360.
Liu, H., Ruan, Z., Zhao, P., Dong, C., Shang, F., Liu, Y.,
and Yang, L. (2020). Video super resolution based
on deep learning: A comprehensive survey. arXiv
preprint arXiv:2007.12928.
Liu, Z.-S., Siu, W.-C., and Chan, Y.-L. (2021). Efficient
video super-resolution via hierarchical temporal resid-
ual networks. IEEE Access, 9:106049–106064.
Lucas, A., Lopez-Tapia, S., Molina, R., and Katsaggelos,
A. K. (2019). Generative adversarial networks and
perceptual losses for video super-resolution. IEEE
Trans Image Process, 28(7):3312–3327.
Nah, S., Baik, S., Hong, S., Moon, G., Son, S., Timofte,
R., and Mu Lee, K. (2019). Ntire 2019 challenge
on video deblurring and super-resolution: Dataset and
study. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR)
Workshops.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. In Wallach, H., Larochelle, H.,
Beygelzimer, A., d’Alch
´
e-Buc, F., Fox, E., and Gar-
nett, R., editors, Advances in Neural Information Pro-
cessing Systems 32, pages 8024–8035. Curran Asso-
ciates, Inc.
Sajjadi, M. S., Vemulapalli, R., and Brown, M. (2018).
Frame-recurrent video super-resolution. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 6626–6634.
Tao, X., Gao, H., Liao, R., Wang, J., and Jia, J. (2017).
Detail-revealing deep video super-resolution. In Pro-
ceedings of the IEEE International Conference on
Computer Vision, pages 4472–4480.
Tian, Y., Zhang, Y., Fu, Y., and Xu, C. (2020). Tdan:
Temporally-deformable alignment network for video
super-resolution. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition (CVPR).
Wang, H., Su, D., Liu, C., Jin, L., Sun, X., and Peng,
X. (2019a). Deformable non-local network for video
super-resolution. IEEE Access, 7:177734–177744.
Wang, X., Chan, K. C., Yu, K., Dong, C., and Change Loy,
C. (2019b). Edvr: Video restoration with enhanced
deformable convolutional networks. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition Workshops, pages 0–0.
Wang, Z., Chen, J., and Hoi, S. C. (2020). Deep learning for
image super-resolution: A survey. IEEE transactions
on pattern analysis and machine intelligence.
Xue, T., Chen, B., Wu, J., Wei, D., and Freeman,
W. T. (2019). Video enhancement with task-oriented
flow. International Journal of Computer Vision,
127(8):1106–1125.
Zhu, X., Li, Z., Zhang, X.-Y., Li, C., Liu, Y., and Xue, Z.
(2019). Residual invertible spatio-temporal network
for video super-resolution. In Proceedings of the AAAI
conference on artificial intelligence, volume 33, pages
5981–5988.
SIGMAP 2022 - 19th International Conference on Signal Processing and Multimedia Applications
58
