
Self-supervised Learning from Semantically Imprecise Data
Clemens-Alexander Brust
1 a
, Bj
¨
orn Barz
2 b
and Joachim Denzler
1,2 c
1
DLR Institute of Data Science, Jena, Germany
2
Friedrich Schiller University Jena, Jena, Germany
Keywords:
Imprecise Data, Self-supervised Learning, Pseudo-labels.
Abstract:
Learning from imprecise labels such as “animal” or “bird”, but making precise predictions like “snow bunting”
at inference time is an important capability for any classifier when expertly labeled training data is scarce.
Contributions by volunteers or results of web crawling lack precision in this manner, but are still valuable.
And crucially, these weakly labeled examples are available in larger quantities for lower cost than high-quality
bespoke training data. CHILLAX, a recently proposed method to tackle this task, leverages a hierarchical
classifier to learn from imprecise labels. However, it has two major limitations. First, it does not learn from
examples labeled as the root of the hierarchy, e.g., “object”. Second, an extrapolation of annotations to precise
labels is only performed at test time, where confident extrapolations could be already used as training data.
In this work, we extend CHILLAX with a self-supervised scheme using constrained semantic extrapolation to
generate pseudo-labels. This addresses the second concern, which in turn solves the first problem, enabling
an even weaker supervision requirement than CHILLAX. We evaluate our approach empirically, showing that
our method allows for a consistent accuracy improvement of 0.84 to 1.19 percent points over CHILLAX and
is suitable as a drop-in replacement without any negative consequences such as longer training times.
1 INTRODUCTION
High-quality training data labeled by domain experts
is an essential ingredient for a successful application
of contemporary deep learning methods. However,
such data is not always available or affordable in suf-
ficient quantities. And while there exist a number
of effective strategies to maximize sample efficiency
such as data augmentation, transfer learning, or active
learning, there are also limits to the information that
can be extracted from a small dataset.
If larger quantities of training data are required, a
compromise w.r.t. the quality has to be made, i.e., by
allowing noisy labels. Such data is available at lower
cost and greater quantity, e.g., by employing volun-
teer labelers instead of experts or crawling the web
for training examples.
In this case, lower quality means that the labels are
noisy w.r.t. to two aspects: accuracy and precision. In-
accuracy means that labels are simply incorrect, i.e.,
confused with other classes. Imprecise labels are cor-
rect, but carry less semantic information in terms of
a
https://orcid.org/0000-0001-5419-1998
b
https://orcid.org/0000-0003-1019-9538
c
https://orcid.org/0000-0002-3193-3300
depth in a class hierarchy (see fig. 1), e.g., “animal”
vs. “bird”. In (Brust et al., 2020), this weakly super-
vised task is formally defined as “learning from im-
precise data”. It is defined such that the training data
can contain imprecise labels, but predictions must al-
ways be as precise as possible, i.e., leaf nodes of the
hierarchy. At test time, labels are said to be extrap-
olated (from imprecise to precise) by their method
CHILLAX, which we briefly explain in section 3.1.
While their method can perform the task reliably,
it has two main limitations. The disadvantages come
from the underlying probabilistic hierarchical classi-
fier (Brust and Denzler, 2019). The classifier is mod-
ified to perform the extrapolation at test time and to
accept imprecise labels during training. However, it
cannot learn from examples that are labeled at root
of the hierarchy, e.g., as “object”, even though it is
clearly capable of the necessary extrapolation at test
time. And while it can learn from inner node exam-
ples, it does not take any advantage of training time
extrapolation for such examples either.
Our main contribution in this work is a self-
supervised approach to learning from imprecise data
based on pseudo-labels. To avoid learning mispredic-
tions and feedback loops, we describe several strate-
Brust, C., Barz, B. and Denzler, J.
Self-supervised Learning from Semantically Imprecise Data.
DOI: 10.5220/0010766700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
27-35
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
27

gies constraining the extrapolation from imprecise la-
bels to more precise pseudo-labels. These strategies
are based on prediction confidence scores and on the
structure of the hierarchy. We also propose methods
that are less sensitive to changes in confidence score
distributions over time, which we call adaptive.
The experimental evaluation concerns two areas.
First, we assess the potential and limits of extrapo-
lation techniques by examining a best case scenario
free of feedback loops. We then evaluate the perfor-
mance of our methods against CHILLAX and observe
the effects of a large range of parameters. The results
show consistent improvements of 0.84 to 1.19 percent
points in accuracy. All experiments are performed on
the North American Birds dataset (Van Horn et al.,
2015) for direct comparison to (Brust et al., 2020).
2 RELATED WORK
The task of learning from semantically imprecise la-
bels is proposed in (Brust et al., 2020), where a class
hierarchy is used to formally define it. It is then tack-
led using a modified hierarchical classifier (Brust and
Denzler, 2019). However, if an image is labeled at the
root of the hierarchy, this classifier cannot leverage
it. Instead, the image is ignored entirely. This prop-
erty is a result of the closed world assumption, which
most hierarchical classifiers make (Silla and Freitas,
1 01). In this work, we resolve this deficiency by ex-
tending the method in (Brust et al., 2020) with a self-
supervision scheme.
Labels can be imprecise in other respects, e.g.,
missing labels in multi-label classification (Abassi
and Boukhris, 2020), or a set of labels where only
one is expected (Ambroise et al., 2001). An impor-
tant problem of semantically imprecise labels is that
the classes are no longer mutually exclusive. The
associated consequences are discussed in detail in
(McAuley et al., 2013), altough this work does not
consider label extrapolation. Instead, it allows impre-
cise predictions. In (Deng et al., 2012), the authors
explicitly mention the trade-off between accuracy and
precision (specificity in their terms) and propose an
algorithm that can reduce the precision of predictions
such that a certain accuracy is guaranteed. This task
is the opposite of ours, where the precision of labels is
reduced, but the predictions are as precise as possible.
The term self-supervised learning has different
meanings depending on the specific field. It is com-
monly used in unsupervised tasks such as visual rep-
resentation learning (Kolesnikov et al., 2019). In this
setting, the supervision that makes training a deep
neural network possible comes from solving auxil-
object
animal vehicle tool
cat dog catbus car bus wre nch
Figure 1: A class hierarchy with semantically imprecise
(dashed) and precise (bold) classes.
liary or “pretext” tasks like predicting the previously
applied rotation of an image. Real applications should
benefit from the representations learned on the auxil-
liary tasks because unlabeled images are ubiquitous.
Another common interpretation of self-
supervision is also known as pseudo-labeling,
where confident predictions of a model are used as
training data (Lee, 2013; Sohn et al., 2020; Wang
et al., 2016). We use this definition in our work
and focus on interpreting the confidence scores at
each level and node in the class hierarchy correctly
to maximize the reliability of our pseudo-labels.
Auxilliary tasks and pseudo-labeling approaches can
also be combined (Zhai et al., 2019).
3 SELF-SUPERVISED METHOD
In this section, we describe our proposed methods and
their theoretical background. We first review the con-
cept of semantically imprecise data and the existing
method to learn from this data. Then, we introduce
our self-supervised approaches.
3.1 Semantically Imprecise Data
Given a class hierarchy, e.g., fig. 1, we can distin-
guish between semantically precise and imprecise la-
bels. Precise labels are leaf nodes in the hierarchy,
while imprecise labels consist of inner nodes and the
root. A useful analogy is the number of digits of a
measurement. Like the depth in a class hierarchy, a
high number does not guarantee an accurate measure-
ment – only a precise one.
The term imprecise data is used as a shorthand to
describe training data that can contain examples with
semantically imprecise labels (Brust et al., 2020).
This relaxation does not apply to the predictions, i.e.,
we still expect them to be as precise as possible. If
the goal is to allow more training data to be used in or-
der to improve an existing application, the predictions
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
28

should remain unchanged. An extrapolation from im-
precise training data to precise output is taking place.
In (Brust et al., 2020), the CHILLAX method
based on (Brust and Denzler, 2019) is proposed. In-
stead of predicting probabilities for each class given
some input, a deep neural network predicts the prob-
ability of a class s being present (the event Y
+
s
), con-
ditioned on both the input image X and the presence
Y
+
S
0
of any parent class (cf. (Brust and Denzler, 2019,
eq. (5))):
P(Y
+
s
|X) = P(Y
+
s
|X,Y
+
S
0
)
| {z }
DNN output
·P(Y
+
S
0
|X) (1)
This equation is evaluated recursively to obtain
the final unconditional probabilities for all “allowed”
classes s, i.e., leaf nodes in the hierarchy. The final
prediction is the leaf node with the highest probabil-
ity. Restricting the possible predictions is necessary,
as leaf nodes cannot have a higher probability than
associated inner nodes owing to the multiplication of
more factors that are ≤ 1. Crucially, the recursion
ends at the root where the probability is always one,
encoding the closed-world assumption. Hence, train-
ing examples that are only labeled at the root have no
effect on the classifier in terms of loss and thus no
value.
3.2 Self-supervised Approach
We propose to make use of effectively unlabeled data
at the root of the class hierarchy, and increase the
value of other imprecise examples, by extrapolating
their labels to pseudo-labels during training. The
classifier’s own predictions are used to generate the
pseudo-labels. Results in (Brust et al., 2020) show
that extrapolation at test time is reliable and we ex-
amine this in more detail in section 4.2.
However, not all predictions are correct, and using
incorrect labels for training can be worse than ignor-
ing the respective example altogether (although con-
trolled amounts of incorrect labels can also be benefi-
cal, see (Xie et al., 2016)). But because we work in a
hierarchical setting, there is a middle ground between
ignoring and using predictions as ground truth. In-
stead of leaf nodes, labels can also be extrapolated to
internal nodes where there is less potential for confu-
sion. In the following, we propose several methods to
determine the appropriate level of extrapolation.
3.2.1 Non-adaptive Methods
While we require that predictions are precise, the
same is not true for training data, and crucially, also
not for pseudo-labels. We can potentially extrapo-
late an imprecise label (the source) to a slightly more
precise label (the target), while both are inner nodes
of the hierarchy. Our main selection criteria for ex-
trapolation targets are the unconditional probabilities
P(Y
+
s
|X), which we compute for all classes in the hi-
erarchy. Using predictions for all nodes is clearly not
necessary, if the label is sufficiently precise, because
that would ignore the label completely. Instead, we
replace all predicted probabilities with 1 or 0 where
appropriate, which also improves the predictions of
related nodes through the recursion. This process en-
sures that the extrapolation target never “disagrees”
with the source. Semantically, the source always sub-
sumes the target.
However, because these unconditional probabili-
ties are always higher for nodes closer to the root, we
cannot simply choose the most confident prediction.
Instead, we consider the following three approaches
that work by building a list of candidates (initially al-
ways all classes subsumed by the source class), then
excluding some, and finally sorting the remainder to
make a selection.
(a) Leaf Node Extrapolate any label to the most prob-
able leaf node. Effectively, all predictions are
used as training data without any further consid-
eration. This strategy has the highest potential for
improvement, but also for inaccuracy. There are
also no parameters to tune.
(b) k Steps Down Limit extrapolation to exactly k
steps “down” the hierarchy from the label, i.e.,
in the more precise direction. Leaf nodes that
are less than k steps down are also allowed be-
cause there might not be any possible extrapola-
tions otherwise. The label is selected based on
the highest predicted unconditional probability
1
. A threshold on the probabilities can be applied
optionally to further exclude unconfident predic-
tions.
(c) Fixed Threshold Extrapolate only to labels with
a predicted unconditional probability greater than
or equal to a given, fixed threshold, e.g., 0.8. We
sort all candidates by this probability
1
. After-
wards, a stable sort of the candidate labels by in-
formation content (IC, a measure of semantic pre-
cision) is performed, such that the candidate with
the highest overall IC is first. Thus, if two candi-
dates have the same IC, we select the candidate
1
Note that we add gaussian noise with σ = 0.0001 to the
probabilities before sorting to make it intentionally unsta-
ble. This is necessary because many predicted probabilities
are exactly 0.5 during initial training as a result of intially
zero weights and a sigmoid activation function. If the sort-
ing were stable, the resulting order would be biased by out-
side factors such as memory layout.
Self-supervised Learning from Semantically Imprecise Data
29

with higher predicted probability. We use the for-
mulation of IC given in (Harispe et al., 2015, 55,
eq. 3.8).
If no candidate remains in either (b) or (c), the
extrapolation source is used as the target. The ap-
proaches (a-c) are stateless and require no informa-
tion other than the extrapolation source, class hierar-
chy, and predicted probablities from the deep neural
network.
3.2.2 Adaptive Methods
A fixed treshold as described in the previous section is
intuitive and easy to implement. However, it has ma-
jor disadvantages. First, it has to be fine-tuned care-
fully. Second, a threshold that is optimal in one train-
ing step may not be optimal for the next because of
the continually increasing confidence during training.
While methods (a) and (b) do not rely on a thresh-
old and thus don’t suffer from these two effects, those
methods are often outperformed by a fixed threshold.
The experiments in section 4.3 show that constrain-
ing possible extrapolations is critical, and that a fixed
structural criterion as in (b) is not always sufficient.
Instead of relying on probabilities directly, we
propose considering the difference in IC of the label
before and after extrapolation, IC gain in short. IC is
a more meaningful measure than hierarchical distance
because it also takes global and local properties, e.g.,
fan-out, of the graph into account. However, we still
want to consider the predicted probabilities as an in-
dicator of confidence in certain classes.
To achieve both goals at the same time, we pro-
pose two adaptive methods. They are adaptive in the
sense that the specific selection criteria vary based on
the source label:
(d) Adaptive Threshold We maintain a moving aver-
age of the last 64 IC gains
¯
h and strive for a target
IC gain h
∗
. This average is used to calculate a
probability threshold θ for each time step t (repre-
senting weight updates or minibatches) by apply-
ing a simple update rule:
θ
(t)
= θ
(t−1)
+
¯
h − h
∗
. (2)
The threshold is bounded by [0.55,1.0] and ini-
tially set to the lower bound. We then apply the
sorting algorithm in (c) to perform the actual ex-
trapolation using the current value of θ.
(e) IC Range An interval of allowed IC differences
is defined, e.g., [0.1,0.3], with the target IC gain
in the middle. We use the interval to preselect ex-
trapolation candidates. Depending on the extrapo-
lation source, the IC difference range allows vary-
ing hierarchical distances to the target, as opposed
to the fixed criterion in (b). Thus, we still consider
this approach adaptive even though the parameters
stay constant throughout training. A final selec-
tion on the preselected candidates is made using
(c) with a threshold of 0.55 to remove further spu-
rious predictions.
Both proposed methods make use of the predicted
probabilities through application of the algorithm in
(c), but rely mainly on its sorting and less on the
threshold. Furthermore, (d) is stateful because the
value of θ needs to be preserved across iterations,
which may be a disadvantage from an implementa-
tion perspective.
4 EXPERIMENTS
This section contains the experimental evaluation of
our methods. We start with a study that determines
an upper limit for any gains from self-supervision by
examining the pseudo-labels generated by our meth-
ods with hierarchical error measures. Then, we test
the efficacy of our approaches in a benchmark set-
ting as well as their sensitivity to parameters. This
detailed evaluation is seperated into non-adaptive and
adaptive approaches as described in section 3.2.1 and
section 3.2.2, respectively.
4.1 Setup
We evaluate the effects of adding our proposed self-
supervised schemes to the CHILLAX method (Brust
et al., 2020). A conventional one-hot softmax classi-
fier is added as a baseline for comparison. Our exper-
imental setup generally matches that of (Brust et al.,
2020), except for adjustments to the learning rate (η)
and the `
2
regularization coefficient β. We use η =
0.0044,β = 5·10
−5
and η = 0.003, β = 1.58114·10
−5
for CHILLAX and the one-hot baseline, respectively.
We report results on the North American Birds
(NABirds) dataset (Van Horn et al., 2015) for com-
parison to the original CHILLAX method. This
fine-grained classification dataset consists of approx.
48500 images of 555 species of birds. Crucially, it
is also equipped with a class hierarchy. The training
portion of the NABirds dataset is modified in different
ways according to a selection of noise models from
(Brust et al., 2020):
(i) No noise (100% precise labels),
(ii) Relabeling to parent with p = 0.99 (Deng et al.,
2014) (1% precise labels),
(iii) Geometric distribution with q = 0.5 (9.6% precise
labels),
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
30

(iv) Poisson distribution with λ = 1 (4.8% precise la-
bels),
(v) Poisson distribution with λ = 2 (22.7% precise la-
bels).
These noise models cover a wide range of scenar-
ios from expertly labeled high-quality data (i) to web
crawling (iii) and volunteer labelers (iv,v). We also
include the protocol (ii) which is proposed in (Deng
et al., 2014). The models are distributions over depths
in the class hierarchy, which are realized by replac-
ing the original precise labels with parent classes to
match the distribution. Note that our experiments are
limited to label noise in terms of imprecision. Inaccu-
racy is beyond the scope of this work, but the extent
of CHILLAX’s relative robustness against inaccurate
labels is demonstrated in (Brust et al., 2020).
Source code will be made available publicly upon
formal publication.
4.2 Limits of Self-supervision
Self-supervised learning with pseudo-labels is subject
to a feedback loop when high-confidence predictions
are used as training data. The scores, e.g.,:
(0.02,0.73, 0.11,. .. ),
are extrapolated to a maximally confident label:
(0.0,1.0, 0.0,. .. ),
in addition to a potential extrapolation from one class
to another. Subsequent predictions of the same image
are likely to be even more confident, thereby increas-
ing the chance of selecting the same target class for
training again. This feedback loop can lead to overfit-
ting, learning of potentially false pseudo-labels, and
overrepresentation of a subset of training data. While
not all methods proposed in this work are subject to
this effect, it is important to investigate the poten-
tial and limits of extrapolated pseudo-labels in a con-
trolled manner such that feedback effects do not influ-
ence the evaluation.
To this end, we train one CHILLAX classifier on a
noisy NABirds training set for each of the noise mod-
els (i)-(v). We then make predictions for the unseen
NABirds validation data, whose labels we also mod-
ify using (i)-(v) and use as extrapolation sources.
Table 1 shows the hierarchical F1 (hF1) score be-
tween the noise-free ground truth and the extrapolated
noisy label from our non-adaptive methods as well as
a “do nothing” baseline. In terms of hF1, all methods
outperform the baseline. This is not surprising in and
of itself. Since no method will select an extrapolation
target that disagrees with the imprecise source, it is
impossible for them to perform worse than the base-
line, at least in terms of hierarchical recall. Still, the
level of outperformance is substantial in all cases and
hierarchical precision could still decrease.
Observing noise model (ii), the theoretically
largest possible improvement over the baseline is
12.51 percent points (pp), if all labels are correctly ex-
trapolated to their precise origin. The actual improve-
ments realized by our approaches range from 3.32 pp
to 7.26 pp over the baseline. In contrast, we observe
the largest overall improvement of 28.08 pp over the
baseline out of a theoretically possible 40.21 pp in set-
ting (iii). This is the noisest model, i.e., the one with
the lowest expected depth in the class hierarchy.
In all cases, the best evaluated approaches can
fill more than half of the performance gap from the
baseline to the precise labels in terms of hF1.
We can also evaluate the extrapolated labels in
terms of classification accuracy, but this is only pos-
sible for the “leaf node” approach. The other ap-
proaches produce imprecise labels as output which
can only be compared to the precise validation set in
terms of hierarchical measures. The results are pre-
sented in table 2. We include a variation where even
the noisy label is withheld from the method, such that
all labels must be extrapolated from the root (effec-
tively unsupervised learning). Including the noisy la-
bel produces an improvement in accuracy of up to
13.9 pp and is always beneficial.
Even in the worst case (iv), more than half of
the labels that are extrapolated as far as possible
are correct. This is a strong result considering the
555 classes and only 4.8% precise labels in the train-
ing set.
4.3 Non-adaptive Methods
The study in section 4.2 shows that most cases, except
possibly (ii), have a strong potential for improvement
by using extrapolated predictions as pseudo-labels.
However, a high hierarchical F1 score in one step does
not necessarily generalize to high accuracy when us-
ing self-supervision continuously during training. On
the one hand, the aforementioned feedback loop could
negatively affect training by overfitting and unbalanc-
ing the training data. On the other hand, the quality of
extrapolations might improve over time as the model
learns from correct pseudo-labels.
We first apply the non-adaptive methods described
in section 3.2.1 to CHILLAX on NABirds. Ground
truth labels are replaced with pseudo-labels at all
times during training. The resulting model is then
evaluated in terms of accuracy on the NABirds val-
idation set. We repeat the experiment six times per
Self-supervised Learning from Semantically Imprecise Data
31
Table 1: Hierarchical F1 (%) on NABirds validation set. Comparison between ground truth and extrapolated noisy validation
labels after learning noisy training data. (i) is not included as all results are 100%.
Method / Noise (ii) (iii) (iv) (v)
Baseline (No Extrapolation) 87.49 59.79 61.73 78.06
1 Step Down 94.74 73.97 74.81 87.27
2 Steps Down 94.74 79.29 79.03 91.31
3 Steps Down 94.72 80.88 79.29 92.91
Fixed Threshold 0.55 90.99 82.87 81.37 93.66
Fixed Threshold 0.8 90.72 81.19 80.03 92.99
Leaf Node 94.75 81.15 79.12 93.20
Table 2: Accuracy (%) on NABirds validation set. Comparison between ground truth and extrapolated noisy validation labels
after learning noisy training data. (i) is not included as all results are 100%.
Method / Noise (ii) (iii) (iv) (v)
Leaf Node 76.99 58.52 51.03 83.81
Leaf Node From Root 63.09 49.55 43.36 70.99
individual setting and include a CHILLAX baseline
for comparison.
The results are shown in table 3, where we first
observe the threshold-based extrapolation method. It
is very sensitive to the confidence threshold and re-
quires substantial fine-tuning. The optimal threshold
strongly depends on the noise model. For example,
the Poisson noise (iv) only has a working range of
thresholds from 0.97 to 0.998 where it matches or out-
performs the baseline, with the optimum at 0.99.
Overall, improvements w.r.t. the baseline range
from 0.84 pp to 1.05 pp.
The “leaf node” and “steps down” methods are
somewhat competitive, specifically for the geometric
noise model (iii). Going k steps down the hierarchy
is only beneficial when combined with a confidence
threshold. However, this combination suffers from the
aforementioned fine-tuning problem.
Always selecting the most confident leaf node
leads to a small improvement in all cases and re-
quires no tuning.
4.4 Adaptive Self-supervision
This experiment compares our two proposed adap-
tive methods of limiting the increase in IC from ex-
trapolation source to target (see section 3.2.2 for de-
tails). The first proposed adaptive method “adaptive
threshold” changes a confidence threshold dynami-
cally to achieve a given expected IC gain. Our ex-
periment uses expected gains of 0.025,.. ., 0.1, where
our choice of IC is naturally bounded between 0
and 1. The second method “IC range” uses a fixed
range of allowed IC differences. We use the ranges
[0,0.2], [0.1,0.3], .. ., [0.4,0.6] and a minimum confi-
dence of 0.55 to reject spurious predictions. We per-
form six training repetitions for each combination of
method and noise model.
Table 4 compares the results of both methods. Our
adaptive threshold method performs better than the
fixed range approach in the noisier settings (iii)-(v),
even outperforming the fine-tuned non-adaptive fixed
threshold method on setting (v) with in improvement
in accuracy of 1.19 pp.
Furthermore, the parameter of our adaptive
threshold method is much less sensitive to changes
than the fixed threshold as evidenced by the large
effective range.
The fixed IC gain range setup only works well for
noise model (ii), which is the immediate parent rela-
beling scenario from (Deng et al., 2014). This result
is expected, because this noise model leaves only two
possibilities for IC gain. There can either be no gain
at all, or the fixed amount when moving from the sec-
ond to last level in the hierarchy to the last level. As
such, the model fits the assumption of a fixed IC gain
range perfectly. The other noise models lead to partly
catastrophic results when the fixed range effectivly
prohibits any extrapolation. However, if the noise dis-
tribution is known before training, it could be argued
that setting a correct range is more straightforward.
Overall, we observe that a fixed threshold per-
forms best, but only after significant fine-tuning. Our
“adaptive threshold” method is less sensitive to
changes in its parameters, and performs slightly
better than the parameter-free “leaf node” ap-
proach, which is why we recommend it as a drop-
in replacement for fully supervised CHILLAX.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
32
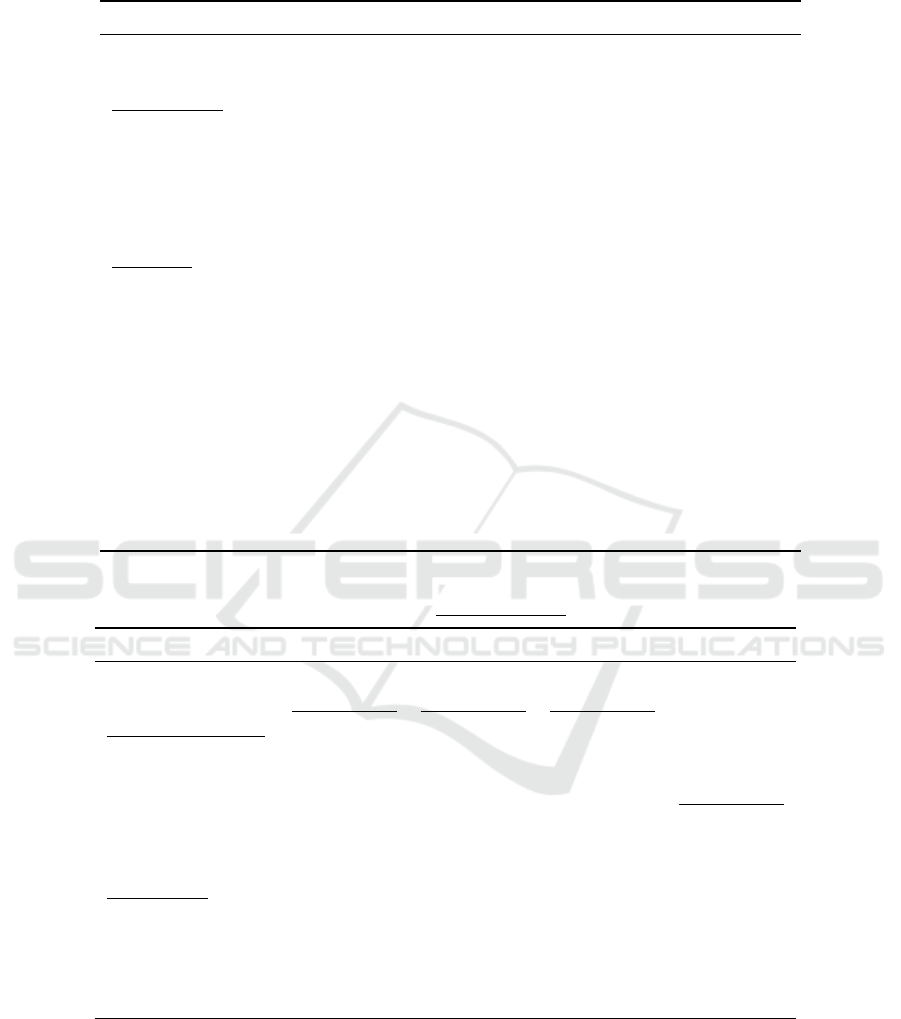
Table 3: Accuracy (%) on NABirds validation set. Comparison between non-adaptive self-supervised methods on noisy
training data. Baseline (i) result 81.63 ± 0.12.
Method / Noise (ii) (iii) (iv) (v)
CHILLAX Baseline 62.66 ± 0.82 49.04 ± 1.04 43.18 ± 0.20 70.91 ± 0.34
Leaf Node 63.05 ± 1.37 49.36 ± 0.48 43.49 ± 0.20 70.94 ± 0.42
k Steps Down
1 61.78 ± 0.27 33.11 ± 0.87 23.49 ± 0.60 65.44 ± 0.83
1, conf. ≥ 0.8 61.75 ± 0.69 48.09 ± 0.75 40.85 ± 1.26 71.67 ± 0.23
1, conf. ≥ 0.9 63.13 ± 0.70 49.98 ± 0.55 41.54 ± 1.37 71.75 ± 0.26
2 61.31 ± 0.68 14.53 ± 0.82 12.12 ± 0.96 59.58 ± 0.60
2, conf. ≥ 0.8 62.07 ± 0.43 48.31 ± 0.84 37.21 ± 0.72 71.74 ± 0.81
2, conf. ≥ 0.9 62.52 ± 0.68 50.68 ± 0.44 41.78 ± 0.47 71.54 ± 0.33
Threshold
0.55 61.48 ± 0.36 26.56 ± 0.94 22.68 ± 0.29 65.32 ± 0.53
0.8 61.73 ± 0.54 39.80 ± 0.97 31.15 ± 1.65 69.86 ± 1.23
0.85 61.93 ± 0.25 43.35 ± 0.72 34.60 ± 0.73 70.59 ± 0.17
0.9 62.34 ± 0.33 46.74 ± 1.27 38.03 ± 0.78 71.77 ± 0.00
0.95 62.75 ± 0.21 48.66 ± 1.03 42.11 ± 1.48 71.47 ± 0.44
0.97 63.00 ± 0.58 50.09 ± 0.26 43.20 ± 0.57 71.40 ± 0.25
0.99 63.51 ± 0.52 49.37 ± 0.28 44.02 ± 0.12 71.14 ± 0.15
0.992 63.02 ± 0.57 48.88 ± 0.65 43.78 ± 0.33 71.21 ± 0.51
0.994 63.54 ± 0.51 49.23 ± 0.55 43.61 ± 0.94 70.99 ± 0.27
0.996 63.11 ± 0.60 49.37 ± 0.61 43.69 ± 1.00 71.08 ± 0.45
0.998 63.10 ± 0.83 49.16 ± 0.63 43.81 ± 0.25 70.96 ± 0.22
0.999 62.78 ± 0.48 49.56 ± 1.04 42.92 ± 0.68 71.37 ± 0.39
Table 4: Accuracy (%) on NABirds validation set. Comparison between adaptive self-supervised methods on noisy training
data. Baseline (i) result 81.63 ± 0.12. Best adaptive result, Best overall result.
Method / Noise (ii) (iii) (iv) (v)
CHILLAX Baseline 62.66 ± 0.82 49.04 ± 1.04 43.18 ± 0.20 70.91 ± 0.34
Best non-adaptive 63.54 ± 0.51 50.68 ± 0.44 44.02 ± 0.12 71.77 ± 0.00
Adaptive Threshold
0.025 61.80 ± 0.69 49.07 ± 0.93 43.35 ± 0.82 71.58 ± 0.40
0.0375 61.43 ± 0.51 49.75 ± 1.13 43.11 ± 1.49 72.00 ± 0.43
0.05 61.80 ± 0.44 49.52 ± 0.90 42.92 ± 0.42 72.10 ± 0.31
0.0625 61.87 ± 0.91 49.57 ± 1.55 42.30 ± 0.35 71.15 ± 0.92
0.075 62.20 ± 0.76 49.97 ± 0.59 41.71 ± 1.13 71.37 ± 0.40
0.1 61.79 ± 0.30 48.57 ± 0.61 39.72 ± 0.96 70.77 ± 0.34
Fixed Range
[0,0.2] 62.11 ± 0.44 46.42 ± 0.71 40.50 ± 0.50 68.39 ± 0.47
[0.1,0.3] 61.78 ± 0.42 29.77 ± 0.98 26.07 ± 0.67 64.31 ± 1.05
[0.2,0.4] 63.43 ± 0.42 36.00 ± 1.29 30.64 ± 0.86 68.61 ± 0.22
[0.3,0.5] 63.23 ± 0.10 35.00 ± 0.46 31.45 ± 0.60 68.55 ± 0.94
[0.4,0.6] 62.96 ± 0.98 33.24 ± 0.65 27.31 ± 1.41 68.46 ± 0.33
5 CONCLUSION
Learning from imprecise data is proposed in (Brust
et al., 2020) as a way of maximizing training data
utilization. However, their method CHILLAX does
not utilize all training data as it ignores examples la-
beled at the root. This is a consequence of the closed-
world assumption made by the underlying classifier.
To avoid such meaningless labels, we propose to use
CHILLAX’s label extrapolation not just at test time,
Self-supervised Learning from Semantically Imprecise Data
33

but during training to generate pseudo-labels. This in-
creases the precision of examples labeled not only at
the root, but also at inner nodes of the class hierarchy.
To implement this self-supervised learning
scheme, we describe several possible strategies of
deciding which candidate pseudo-labels are reli-
able enough for training. These strategies employ
heuristic, structural and statistical criteria. Our
experiments show that an increase in accuracy of
around one percent point can be expected by simply
using one of our self-supervised strategies on top of
CHILLAX. This improvement comes without any
requirement of fine-tuning unrelated parameters or
undue computational efforts.
Future Work. In the future, these methods could
also be applied to semi-supervised learning tasks in
general, e.g.,, by assigning a root label to the unla-
beled images as long as a closed-world scenario can
be assumed. Furthermore, the individual heuristics
could be combined into a meta-heuristic. In contrast,
relaxing the closed-world assumption is another im-
portant research direction. Asking a hierarchical clas-
sifier for its confidence in the root node is a first step
towards open-set models from a semantic perspective,
as long as the predicted confidence has a reasonable
basis. A fixed hierarchy is a further limiting assump-
tion, which could be relaxed, e.g.,, in a lifelong learn-
ing setting.
The research on semantically imprecise data in
general could be expanded to domains beyond nat-
ural images. For example, we expect source code
to have a stronger feature-semantic correspondence,
which is crucial for the hierarchical classifier. In par-
ticular, human-made hierarchies such as the Common
Weakness Enumeration (CWE, (The MITRE Corpo-
ration, 2021)) explicitly consider certain features of
program code to determine categories. And even in
the visual domain, there are efforts to construct more
visual-feature-oriented hierarchies, e.g.,, accompany-
ing WikiChurches (Barz and Denzler, 2021).
ACKNOWLEDGMENTS
The computational experiments were performed on
resources of Friedrich Schiller University Jena sup-
ported in part by DFG grants INST 275/334-1 FUGG
and INST 275/363-1 FUGG.
REFERENCES
Abassi, L. and Boukhris, I. (2020). Imprecise label ag-
gregation approach under the belief function theory.
In Abraham, A., Cherukuri, A. K., Melin, P., and
Gandhi, N., editors, Intelligent Systems Design and
Applications, pages 607–616. Springer International
Publishing.
Ambroise, C., Denœux, T., and Govaert, G. (2001). Learn-
ing from an imprecise teacher: probabilistic and ev-
idential approaches. Applied Stochastic Models and
Data Analysis, page 6.
Barz, B. and Denzler, J. (2021). Wikichurches: A fine-
grained dataset of architectural styles with real-world
challenges. In Neural Information Processing Systems
(NeurIPS).
Brust, C.-A., Barz, B., and Denzler, J. (2020). Making ev-
ery label count: Handling semantic imprecision by in-
tegrating domain knowledge. In International Confer-
ence on Pattern Recognition (ICPR).
Brust, C.-A. and Denzler, J. (2019). Integrating domain
knowledge: using hierarchies to improve deep clas-
sifiers. In Asian Conference on Pattern Recognition
(ACPR).
Deng, J., Ding, N., Jia, Y., Frome, A., Murphy, K., Bengio,
S., Li, Y., Neven, H., and Adam, H. (2014). Large-
scale object classification using label relation graphs.
In European Conference on Computer Vision (ECCV).
Deng, J., Krause, J., Berg, A. C., and Fei-Fei, L. (2012).
Hedging your bets: Optimizing accuracy-specificity
trade-offs in large scale visual recognition. In Com-
puter Vision and Pattern Recognition (CVPR).
Harispe, S., Ranwez, S., Janaqi, S., and Montmain, J.
(2015). Semantic similarity from natural language and
ontology analysis. Synthesis Lectures on Human Lan-
guage Technologies, 8(1):1–254.
Kolesnikov, A., Zhai, X., and Beyer, L. (2019). Revisiting
self-supervised visual representation learning. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR).
Lee, D.-H. (2013). Pseudo-label : The simple and effi-
cient semi-supervised learning method for deep neu-
ral networks. In International Conference on Machine
Learning Workshops (ICML-WS), page 6.
McAuley, J. J., Ramisa, A., and Caetano, T. S. (2013). Op-
timization of robust loss functions for weakly-labeled
image taxonomies. International Journal of Computer
Vision (IJCV), 104(3):343–361.
Silla, C. N. and Freitas, A. A. (2011-01). A survey of
hierarchical classification across different application
domains. Data Mining and Knowledge Discovery,
22(1):31–72.
Sohn, K., Berthelot, D., Li, C.-L., Zhang, Z., Carlini, N.,
Cubuk, E. D., Kurakin, A., Zhang, H., and Raffel,
C. (2020). FixMatch: Simplifying semi-supervised
learning with consistency and confidence.
The MITRE Corporation (2021). Common Weakness Enu-
meration (CWE).
Van Horn, G., Branson, S., Farrell, R., Haber, S., Barry,
J., Ipeirotis, P., Perona, P., and Belongie, S. (2015).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
34

Building a bird recognition app and large scale dataset
with citizen scientists: The fine print in fine-grained
dataset collection. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 595–604.
Wang, K., Zhang, D., Li, Y., Zhang, R., and Lin, L. (2016).
Cost-effective active learning for deep image classi-
fication. Circuits and Systems for Video Technology
(CSVT), PP(99):1–1.
Xie, L., Wang, J., Wei, Z., Wang, M., and Tian, Q. (2016).
Disturblabel: Regularizing cnn on the loss layer. In
Computer Vision and Pattern Recognition (CVPR).
Zhai, X., Oliver, A., Kolesnikov, A., and Beyer, L. (2019).
S4l: Self-supervised semi-supervised learning. In
Proceedings of the IEEE/CVF International Confer-
ence on Computer Vision (ICCV).
Self-supervised Learning from Semantically Imprecise Data
35
