
Object Detector Differences When using Synthetic and Real Training
Data
Martin Georg Ljungqvist
1
a
, Otto Nordander
1
, Arvid Mildner
2
, Tony Liu
2
and Pierre Nugues
2 b
1
Axis Communications AB, Lund, Sweden
2
Department of Computer Science, Lund University, Lund, Sweden
Keywords:
Object Detection, Layer Similarity, Centered Kernel Alignment.
Abstract:
To train well-behaved generalizing neural networks, sufficiently large and diverse datasets are needed. Col-
lecting data while adhering to privacy legislation becomes increasingly difficult and annotating these large
datasets is both a resource-heavy and time-consuming task. An approach to overcome these difficulties is to
use synthetic data since it is inherently scalable and can be automatically annotated. However, how training on
synthetic data affects the layers of a neural network is still unclear. In this paper, we train the YOLOv3 object
detector on real and synthetic images from city environments. We perform a similarity analysis using Cen-
tered Kernel Alignment (CKA) to explore the effects of training on synthetic data on a layer-wise basis. The
analysis captures the architecture of the detector while showing both different and similar patterns between
different models. With this similarity analysis we want to give insights on how training synthetic data affects
each layer and to give a better understanding of the inner workings of complex neural networks. The results
show that the largest similarity between a detector trained on real data and a detector trained on synthetic data
was in the early layers, and the largest difference was in the head part.
1 INTRODUCTION
Using convolutional neural networks (CNNs) is a
popular approach to solve the object detection prob-
lem in computer vision. A lot of effort has been
put into developing accurate and fast object detectors
leveraging the structure of convolutional layers (Liu
et al., 2016; Lin et al., 2017; Redmon and Farhadi,
2018; Tan et al., 2020). This has led to a dras-
tic increase in performance of object detectors dur-
ing the past few years. However, these models gen-
erally require massive amounts of labeled training
data to achieve good performance and generalization
(Nowruzi et al., 2019). Building these datasets can be
both time consuming and resource heavy.
First, the raw data needs to be collected, often
involving complex data acquisition setups and gath-
ering schemes. Adhering to privacy, data protection
regulations and ensuring the diversity and quantity of
the data becomes an increasingly difficult challenge.
Second, the data needs to be annotated. Since
datasets for deep learning often include several thou-
sand images, the annotation process becomes a very
mundane, time-consuming, and error-prone task.
a
https://orcid.org/0000-0002-0115-869X
b
https://orcid.org/0000-0002-9563-4000
One way of avoiding these issues is using syn-
thetic data for training. Generated synthetic datasets
are inherently scalable and labelling of the data can
be done automatically. These datasets can for exam-
ple be generated using a data generation tool such as
Carla (Dosovitskiy et al., 2017), or sampling videos
from open-world video games like Grand Theft Auto
V (GTA V) (Richter et al., 2017; Johnson-Roberson
et al., 2017).
A general problem with deep neural networks is
that their complexity makes it difficult to understand
exactly why a certain prediction has been made. This
has led to neural networks often being considered
as black boxes (Alain and Bengio, 2016; Fong and
Vedaldi, 2017), where one only looks at the input and
the output, while relying on trial and error when cre-
ating a well-working system. CNNs are less regarded
as black boxes since they are suitable for visualisa-
tion, but that renders a vast amount of information to
overview and may not tell everything about the net-
works inner workings. There have been many stud-
ies on understanding and visualizing the inner work-
ings of deep neural networks (Hardoon et al., 2004;
Zeiler and Fergus, 2014; Alain and Bengio, 2016;
Fong and Vedaldi, 2017; Raghu et al., 2017; Morcos
et al., 2018; Kornblith et al., 2019; Zhang et al., 2019;
48
Ljungqvist, M., Nordander, O., Mildner, A., Liu, T. and Nugues, P.
Object Detector Differences When using Synthetic and Real Training Data.
DOI: 10.5220/0010778200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
48-59
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Hermann and Lampinen, 2020; Nguyen et al., 2021;
Ge et al., 2021).
In this work, we investigate how object detection
models are affected when trained on synthetic data
versus real data by exposing the inner workings of
the network. One key element will be the comparison
between the outputs from individual hidden layers in
the models using the recently proposed idea of simi-
larity measurement (Kornblith et al., 2019). Our work
builds upon Liu and Mildner (2020).
Our aim is to investigate how synthetic data af-
fects the performance of object detection models as
well as how hidden layers in the CNNs are affected
by different types of training data. More specifically:
1. How does a model trained on synthetic data differ
from one trained on real data and what network
layers are affected?
2. Does freezing the backbone affect this?
To the best of our knowledge, no such analysis has
been made on a CNN object detector using real and
synthetic data.
Our main contributions are:
• We show what parts of the network are most sim-
ilar for a detector trained on real image data com-
pared to when it is trained on synthetic data.
• We also determine the consequences of freezing
the backbone or not when further training a detec-
tor on synthetic data.
2 RELATED WORK
2.1 Object Detection
One-stage detectors are suitable for use in real-time
object detection in video. These methods sample
densely on the set of object locations, scales, and as-
pect ratios. Proposed methods are for example YOLO
(Redmon and Farhadi, 2018), RetinaNet (Lin et al.,
2017), SSD (Liu et al., 2016) and EfficientDet (Tan
et al., 2020). These networks are significantly faster
while having comparable performance to the con-
ventional two-stage methods. Because of its speed,
comparable accuracy, and relatively light-weightness,
YOLOv3 (Redmon and Farhadi, 2018) was chosen
for our experiments.
2.2 Synthetic Data
There are several synthetic datasets of city environ-
ments available and severalexperiments of training on
synthetic data have been conducted. VKITTI (Gaidon
et al., 2016; Cabon et al., 2020) is a synthetic ver-
sion of the KITTI dataset (Geiger et al., 2013), but it
does not contain persons. Synthia (Ros et al., 2016)
is another synthetic dataset of images from urban
scenes, where the results showed increased perfor-
mance when training on a mixture of real and synthe-
sized images. The video game GTA V has been used
to generate synthetic datasets (Richter et al., 2017;
Johnson-Roberson et al., 2017).
The experiments conducted in Johnson-Roberson
et al. (2017) showed that training a Faster R-CNN on
a GTAV synthetic dataset of at least 50,000 images in-
creased the performance compared to training on the
smaller real dataset Cityscapes (Cordts et al., 2016)
when evaluated on the real KITTI dataset (Geiger
et al., 2013). However, these experiments only used
cars as labels, disregarding other labels such as per-
sons and bicycles.
The Synscapes dataset is a synthetic version of
Cityscapes (Wrenninge and Unger, 2018). The au-
thors claim that training on only Synscapes yields
decent results, but lowers performance compared to
training on real data when evaluated on Cityscapes.
However, their experiments showed that models
trained on Synscapes outperformed both models
trained only on GTAV (Richter et al., 2017) and Syn-
thia (Ros et al., 2016).
Furthermore, Wrenninge and Unger (2018)
claimed that training on a mixture of synthetic and
real data can further improve performance, outper-
forming models trained only on real data. Results
from Nowruzi et al. (2019) showed that training on
synthetic data and fine-tuning on real data yielded
better performance than training on a mixed real-
synthetic dataset. The authors also concluded that
photo-realism in the synthetic data was not necessar-
ily as important as other factors in the training such as
diversity.
Non-artistically generated images have been pro-
duces by domain randomization (Tremblay et al.,
2018), where parameters such as lighting, pose, and
textures were randomized. The authors showed that
with additional fine-tuning on real data, their model
outperformed models trained only on real data for ob-
ject detection of cars on the KITTI dataset. Further-
more, they argued that letting the backbone be train-
able during training on synthetic data yielded bet-
ter performance compared to freezing the backbone
weights.
Synthetic data have been used for pedestrian de-
tection and pose estimation (Hattori et al., 2018). The
authors showed that training on synthetic images only
yielded a model that outperformed a model trained
on real data only. However, the models were scene-
Object Detector Differences When using Synthetic and Real Training Data
49

specific and location-specific where they used a priori
knowledge about the camera parameters and the scene
geometry.
Hinterstoisser et al. (2018) superimposed 3D ren-
dered models of toys with different lighting and poses
onto real backgrounds. As opposed to Tremblay
et al. (2018), the authors argued that freezing back-
bone weights (when they are initialized from a pre-
trained backbone) during training on the synthetic
data yielded better performance compared to letting
the backbone be trainable. The authors of Tremblay
et al. (2018) argued that a possible explanation could
be that the dataset that they used was large and diverse
enough to further improve the backbone.
2.3 Similarity of Neural Networks
One way of obtaining more insight on how a CNN
network behaves is looking at the outputs layer-wise.
By comparing layer outputs from two different mod-
els, one can determine the similarity between the lay-
ers. One method of measuring the similarity of layer
outputs is the singular value canonical correlation
analysis (SVCCA) (Raghu et al., 2017). SVCCA
uses singular value decomposition (SVD) (Golub and
Reinsch, 1971) for dimensionality reduction and then
canonical correlation analysis (CCA) (Hardoon et al.,
2004) which was previously used to learn seman-
tic representations for web images. A further im-
provement of SVCCA is the projection weighted CCA
(PWCCA) (Morcos et al., 2018), which uses projec-
tion weighting to calculate the similarity measure as a
weighted mean instead of a naive mean as in SVCCA.
Both metrics are invariant to invertible linear
transformations which according to Kornblith et al.
(2019) leads to some major issues. Kornblith et al.
(2019) instead proposed a metric called centered ker-
nel alignment (CKA) which, according to the authors,
better captures similarity representationsbetween net-
work layers.
Later work (Raghu et al., 2017; Morcos et al.,
2018) have shown that the Euclidean distance is not
an ideal measurement of similarity between hidden
layer outputs, but it can still give some useful insights.
While there exist several papers that attempt to an-
swer how initialization, model complexity, or dataset
size affect the similarity between models (Raghu
et al., 2017; Morcos et al., 2018; Kornblith et al.,
2019), no attempts have been made to compare the
difference between models trained on synthetic and
real data. As CKA gives a layer-wise similarity of
hidden layers within the network, it can give insights
of how such networks differ from each other on a
layer-basis. These insights could be leveraged for ex-
ample during training to target specific layers inside
networks to improve performance.
3 MATERIALS AND METHODS
3.1 Datasets
3.1.1 Berkeley Deep Drive
The Berkeley Deep Drive (BDD) dataset (Yu et al.,
2020) consists of 100,000 driving images collected
from 50,000 rides, with 720p resolution. The images
were collected from diverse scenes such as cities, resi-
dential areas, and highways, recorded during different
hours of the day and in different weather conditions.
The images are annotated with bounding boxes and
class label.
20,000 out of the 100,000 images are reserved for
the test set. Since the labels for the test set are un-
available, we use only the remaining 80,000 images
for our experimentsrandomly divided into 60/20/20%
for training, validation, and testing
1
.
3.1.2 Grand Theft Auto V
The Playing for Benchmarks dataset, here denoted
GTAV, consists of 1080p images sampled from video
sequences from the video game Grand Theft Auto V
(Richter et al., 2017). Each rendered image has infor-
mation about the objects’ labels and positions.
The training set consists of about 134,000 images
which were collected on different time of day, in dif-
ferent weather conditions in the fictional city. Those
images were here divided into 60/20/20% for training,
validation, and testing, for the experiments
1
.
The GTAV dataset consists of labels of objects
that can be very far away or persons inside vehicles
which makes them very hard or sometimes impossi-
ble to spot. Therefore, we filtered out small bound-
ing boxes with an area smaller than 100 pixels. This
area was chosen by empirical visual inspection of the
ground-truth bounding boxes.
Furthermore, in the GTAV dataset, the hood of the
driving car is labeled while it is not labeled in the
BDD dataset. Therefore, we also removed the hood
annotations from the dataset.
3.2 Intersection of Class Labels
The GTAV (Richter et al., 2017) and BDD (Yu et al.,
2020) datasets use different class labels. GTAV has
1
https://github.com/ljungqvistmartin/datasplits
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
50

32 classes while BDD has 10. Moreover, label names
in the datasets also differ.
Therefore, a common subset of five classes was
selected. This label space is called the common la-
bels: car, person, cycle, truck, bus. The mapping
from BDD and GTAV labels to the common labels
are shown in Table 1.
3.3 YOLOv3
YOLOv3, You Only Look Once version 3, (Red-
mon and Farhadi, 2018) is a one-stage object detec-
tor. Compared to similar performing object detec-
tion methods, YOLOv3 claims to be faster at infer-
ence due to its one-stage detection process. The high
inference speed is especially attractive in a real-time
detection application.
The YOLOv3 architecture builds on extracting
features from an image using Darknet-53, a backbone
built of 23 residual blocks including 52 convolutional
layers, which down-samples along the network depth
using the stride length instead of max pooling.
The backbone is divided into residual blocks i.e.
leveraging shortcut connections similarly to ResNet
backbones (He et al., 2016). The benefit of such skip
connections is that they deal with vanishing gradients
and at the same time encourage feature reuse, which
makes the model more parameter-efficient.
The YOLOv3 network contains 107 layers in total
(numbered 0 to 106), of which 75 are convolutional
layers, 23 residual (shortcut) layers (all in the back-
bone), 4 route layers where shortcuts end up (all in
the head). Downscaling is done by a factor of two at
layers 1, 5, 12, 37, and 62 in the backbone. Of the
convolutional layers, 38 have a kernel of 3× 3 and 37
have a kernel of 1× 1.
The YOLOv3 network predicts bounding boxes at
three resolution levels. These final prediction layers
are referred to as detection layers; layers 82, 94, and
106. Each detection layer consists of a grid, where
each cell contains the prediction of a bounding box,
its objectness score, and a classification score for each
class. All three detection layers are immediately pre-
ceded by seven convolutional layers.
After the low-resolution detection layer (layer 82),
responsible for detecting high-level objects, the out-
put is up-sampled (85) and concatenated (83 and
86) with intermediate output from Darknet-53 (61),
which corresponds to the same up-sampled resolu-
tion. This concatenated tensor is passed through
seven convolutional layers (87-93) and finally through
the second detection layer (94). The same procedure
is then repeated for the layers preceding the third and
last detection layer (106).
The detection layers are grids, where the cells are
responsible for predicting the bounding boxes as well
as containing the predicted object and class probabil-
ity. In inference, bounding boxes are non-maximum
suppressed according to their objectiveness score, fil-
tering out instances which the network believes have
low probability of containing objects. The remaining
bounding box predictions are then used in the actual
prediction of the model.
3.4 The Models
CNNs are often divided into two parts: a backbone re-
sponsible for feature extraction and a detection head
or classifier. Since training a backbone can be time
consuming, training of CNNs often uses pre-trained
backbone weights at initialization to reduce the com-
putations needed. It is also advantageous for general-
ization.
The feature extraction layers could be considered
general enough and that it is beneficial to freeze the
layers as a kind of regularization (Hinterstoisser et al.,
2018). On the other hand, the feature extraction layer
weights may still have room for actual improvement
and further training could increase the overall per-
formance. Therefore, we analyze three differently
trained models.
All trained models use the same hyperparameters:
a learning rate of 10
−4
, a batch size of 8, the Adam
optimizer, 100 epochs with patience 10 (early stop-
ping). Also, the random seed was set to the same
value for all training sessions for them to have the
same prerequisites, to be reproducible and reduce dif-
ferences between models.
The images were scaled to 416 × 416 pixels for
training, test, and analysis. However, the CKA
comparison analysis was performed feeding images
rescaled to 32 × 32 pixels to the networks to make
the large matrices of concatenated activations fit in
the working memory. Even though the models were
not trained for this resolution, they have seen simi-
lar downscale resolution inside the network, but for a
smaller input. The downscale inside the network will
render correspondingly lower scale so each layer has
not seen this particular scale at training. Touvron et al.
(2019) have shown that for the convolutional part of
a CNN the receptive field is unaffected by the input
size. We focus on the similarity between the models
and assume that the workings of the models are still
viable.
There are multiple datasets with real and synthetic
image data. For our experiments, we chose BDD to
represent a dataset of real images, along with GTAV
to represent a dataset of synthetic images.
Object Detector Differences When using Synthetic and Real Training Data
51
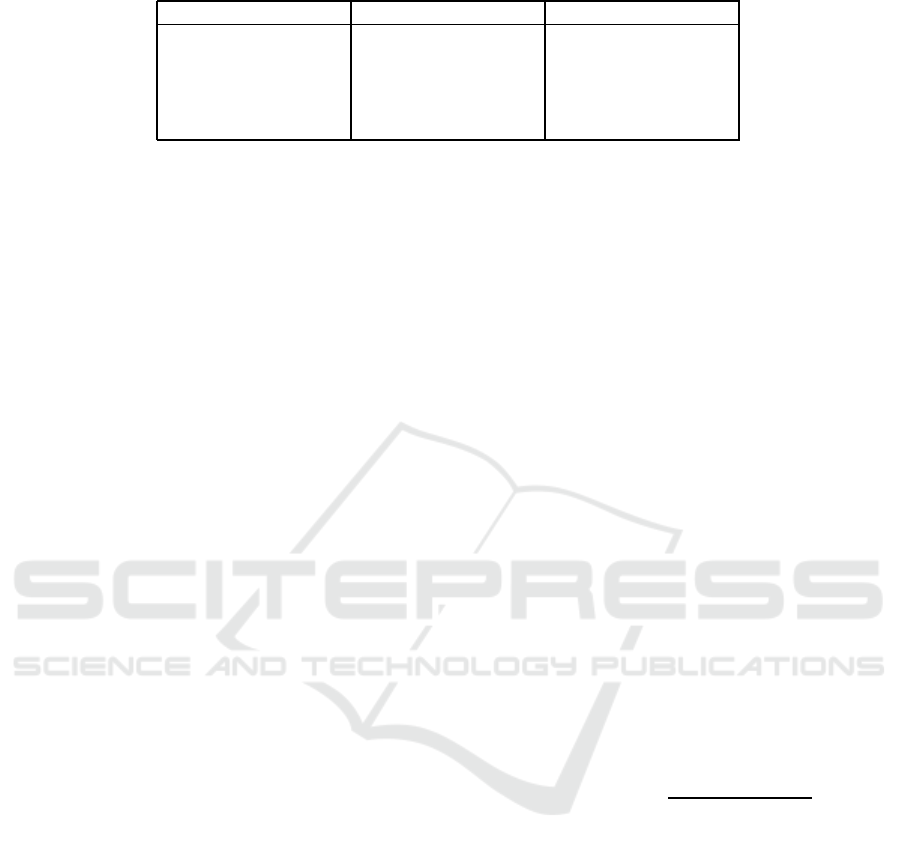
Table 1: The label map between BDD, GTAV labels and the common labels.
Common BDD GTAV
person person, rider person
cycle bike, motor bicycle, motorcycle
car car car, van
bus bus bus
truck truck truck, trailer
All models were initialized with the ImageNet
pre-trained Darknet-53 backbone which populates
layers 0 to 74. Layers 75 up to layer 106 was pop-
ulated randomly according to Kai-Ming uniform dis-
tribution.
U-Real – Further trained with all layers trainable
(unfrozen) on our training set of BDD.
U-Synthetic – Further trained on the GTAV training
set with all layers trainable (unfrozen).
F-Synthetic – Further trained on the GTAV training
set with only detection head trainable i.e. layer
75-106 and thus leaving the backbone untrainable
(frozen).
3.5 Similarity Metric
Comparing the similarity between two neural net-
works can be done in many ways. One approach is to
look at the output for each individual layer and com-
pare the outputs between networks. The problem can
be described in the following way (Kornblith et al.,
2019):
Let X
i
∈ R
p×n
and Y
i
∈ R
p×n
be the output of
layer i in form of matrices from two networks
with p neurons each, fed with the same n in-
puts. We want to introduce a metric function
s(X
i
, Y
i
) that can be used to compare the simi-
larity between two output matrices, to give in-
sight of the behaviour and similarities between
the hidden layers inside the models.
Several measures of similarity complying with
this definition have been suggested. SVCCA (Raghu
et al., 2017) and PWCCA (Morcos et al., 2018) are
two examples of measuring representational similar-
ity. Both metrics are invariant to invertible linear
transforms i.e.
s(X, Y) = s(AX, BY) (1)
for any invertible matrices A and B. This is argued
to be an important property for comparing layer out-
puts. However, according to Kornblith et al. (2019), a
metric with invariance to invertible linear transforma-
tions has the limitation of yielding the same similarity
for all outputs with a greater width than the number of
datapoints i.e. p ≥ n.
The authors further argue that the scale of layer
outputs also is important for representations. There-
fore, similarity indices that preserve scale informa-
tion, such as the Euclidean distance, can be helpful
on giving insights of the activations. For a metric
that is invariant to invertible transforms, the magni-
tude of the vectors in the activation space is irrele-
vant and therefore ignores this important information.
Instead of requiring the similarity index to be invari-
ant to invertible linear transform, a weaker invariance
condition can be considered: invariance to orthogonal
transformations. Invariance to orthogonal transforma-
tions means that s(X, Y) = s(UX, VY) for any orthog-
onal matrices U and V. A property is that invariance
to orthogonal transformations also means invariance
to permutations which is important since the convolu-
tional layer outputs should have the same representa-
tions independent of channel-wise permutations.
One such similarity index is linear CKA (Korn-
blith et al., 2019). CKA is not only invariant to
orthogonal transforms but also invariant to isotropic
scaling i.e. s(X, Y) = s(αX, βY) for any α, β ∈ R
+
.
For the matrices X and Y, the CKA with a linear ker-
nel is defined as:
CKA(X, Y) =
||Y
T
X||
2
F
||X
T
X||
F
||Y
T
Y||
F
, (2)
where || · ||
F
is the Frobenius norm and n is the
number of data points i.e. columns in X and Y.
With this index definition, Kornblith et al. (2019) have
shown that the CKA captures intuitive similarity ideas
such as models trained in the same way with different
initialization should be similar.
In our experiments, we used linear CKA.
3.5.1 Convolutional Layers
While the CKA analysis requires matrices, the convo-
lutional layers in the network output tensors. To solve
this problem, we follow the line of Kornblith et al.
(2019) and treat the output tensors of shape (n, h, w, c)
as a collection of vectors of the shape (n, h · w · c)
where n is the number of images fed through the net-
work, w and h are the width and height of the image,
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
52
and c is the number of output channels (activations)
i.e. the number of convolutional kernels for the spe-
cific layer.
3.6 Representational Similarity
Model U-Real gives us an indication of the perfor-
mance we can obtain by only collecting a lot of real
data.
Convolutional layers of the same layer index may
have different roles in different networks trained on
different data. Arguments can be made that the output
of individual layers is not as important as the resulting
output after a block of layers. However, here we focus
on interpreting the single layer outputs.
The experiments used the CKA method described
by Kornblith et al. (2019) to analyze the similarity be-
tween layers of several models.
The layer-wise similarity analysis was done by
feeding 200 random images from our BDD test set
through the trained networks and performing CKA on
the layer outputs to find which layers are similar and
which are not.
Residual layers i.e. shortcut layers essentially just
sum outputs from two layers without any weights,
they are though included in the CKA analysis for
completeness of including all layers.
3.7 Implementation
The experiments were performed using the open-
source implementation of YOLOv3 developed by Ul-
tralytics (2019), using PyTorch 1.4 and the CKA im-
plementation by Kornblith et al. (2019).
The performances presented as mean average pre-
cision (mAP) in the experiments are for all five com-
mon classes using mAP@0.5 i.e. mAP at 0.5 inter-
section over union (IoU).
4 RESULTS
In order to see that the trainings were successful, the
resulting mAP of the trained models evaluated on our
test set of the synthetic GTAV dataset and our test set
of the real BDD dataset using image size 416× 416
are presented in Table 2.
The models yielded best mAP on the type of
data they were trained for, where U-Real got about
0.43 mAP on BDD while model U-Synthetic and F-
Synthetic both only got about 0.12 mAP. Tested on
GTAV model U-Synthetic and F-Synthetic both got
about 0.89 mAP while U-Real got about 0.44 mAP.
It can be seen that model U-Synthetic and F-
Synthetic had comparable mAP on both BDD and
GTAV respectively, considering variations of train-
ings with different random seeds, see Table 2.
4.1 Layer-wise Analysis
The objective was to observe differences in models
trained on real and synthetic data. Model U-Real was
trained on real data only (ImageNet + BDD), while
the head parts of U-Synthetic and F-Synthetic were
trained on synthetic data only. Figures 1 and 2 show
the results of the CKA similarity analysis using 200
images from our BDD test set that were fed through
the models.
Summary statistics of all layer outputs (activa-
tions), averaged over all layers, are presented in Ta-
bles 3 and 4. A small difference in distribution can
be observed between model U-Real trained on real
data and the models trained on synthetic data: Mod-
els U-Synthetic and F-Synthetic. The difference was
mostly in the mean and standard deviation. Compa-
rably, models U-Synthetic and F-Synthetic have quite
similar layer output value distribution. This can be
observed both for image size 416× 416 and 32× 32,
making it consistent between the mAP analysis and
CKA analysis.
Figure 1: CKA similarity for all layers in entire YOLOv3
when images from our BDD test set were passed through
the networks that were trained with seed 0.
The CKA similarity can be seen in Figures 1
and 2, where there was high similarity between real
and synthetic models for both U-Synthetic and F-
Synthetic in the first 13 layers of the network where
all have similarity above 0.9 and most of them above
0.95. The similarity was above 0.7 for the first layers
until layer 37. After layer 37 there was more variation
in the similarity between the models. The similarity
was quite high in most of the backbone until layer 61.
Comparing model U-Real with the synthetic mod-
els, the similarity from layer 62 to 85 was under 0.35.
Object Detector Differences When using Synthetic and Real Training Data
53
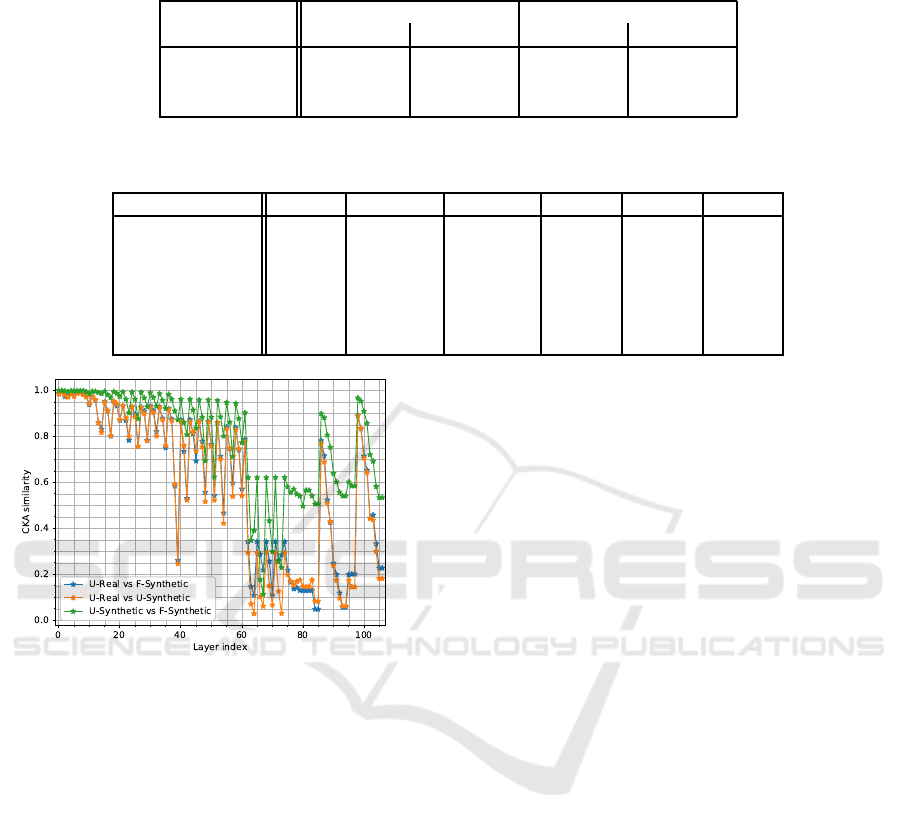
Table 2: Performance of models trained on GTAV synthetic data: U-Synthetic and F-Synthetic as well as model U-Real
trained on our BDD training set. All evaluated for mAP on our GTAV test set and our BDD test set.
Model mAP on BDD mAP on GTAV
seed 0 seed 1 seed 0 seed 1
U-Real 0.428 0.430 0.440 0.439
U-Synthetic 0.122 0.124 0.886 0.893
F-Synthetic 0.125 0.121 0.892 0.884
Table 3: Summary statistics of all layer outputs when feeding the network with 200 images of size 416× 416 from our BDD
test set. Values were averaged over all layers.
Model seed mean median std min max
U-Real 0 -0.0165 -0.116 0.961 -21.8 54.4
U-Real 1 -0.0145 -0.113 0.959 -21.0 52.1
U-Synthetic 0 -0.0272 -0.113 0.986 -22.0 52.4
U-Synthetic 1 -0.0269 -0.110 0.995 -22.3 50.3
F-Synthetic 0 -0.0263 -0.111 1.00 -22.2 51.0
F-Synthetic 1 -0.0235 -0.110 0.983 -23.2 48.0
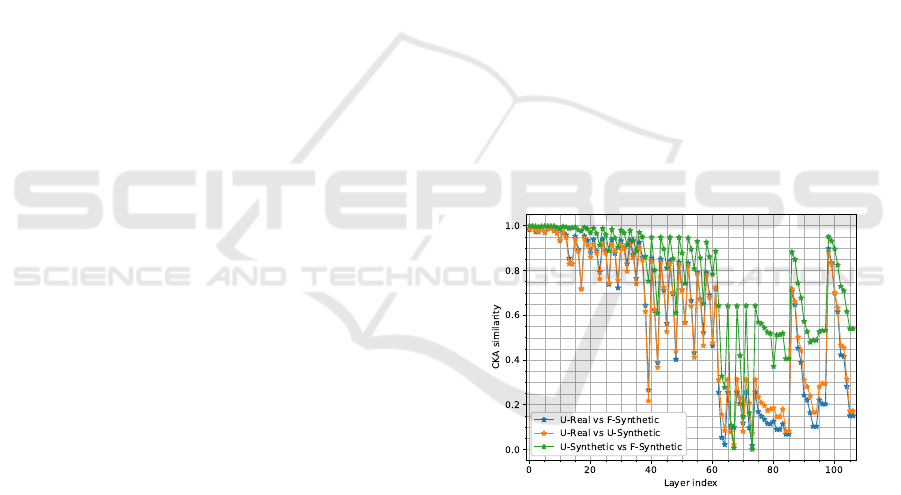
Figure 2: CKA similarity for all layers in entire YOLOv3
when images from our BDD test set were passed through
the networks that were trained with seed 1.
The similarity was relatively low for the three detec-
tion layers in the head (layers 82, 94, 106), includ-
ing their preceding layer, where all have similarity be-
tween 0.05 and 0.2.
In the head part, there were two peaks, at route
layers 86 (concatenating the previous layer output
with the output from layer 61) and 98 (concatenat-
ing the previous layer output with the output from
layer 36), both routing from layers in the backbone.
Since the similarity was high in the backbone overall,
it is reasonable that there were similarity peaks where
those two backbone layers are routed in the head part.
In the head part, each detection layer and the one
immediately preceding convolutional layer had the
same similarity values.
The average of CKA similarity was higher in the
backbone than in the head part for both comparisons
of U-Real vs the synthetic models, see Table 5. Like-
wise, the similarity between model U-Synthetic and
model F-Synthetic was overallhigher than when com-
pared to model U-Real. The head part had lower sim-
ilarity than the backbone and lower than the mean of
all layers, for all comparisons.
Note the part between layer 62 and 85 in Figures
1 and 2 that all had lower values than the rest of the
network in all comparisons.
The input images of size 32 × 32 have the size
1 × 1 in this region, which was lower than the con-
volutional kernel of 3 × 3 used in most layers in the
entire network. However, for larger image sizes, it
was not possible to perform these CKA calculations
for the entire network since it would demand a vast
amount of working memory. However, they could be
performed for large parts of the network and larger
image input sizes such as 128 × 128 showed similar
patterns in that region, see Figure 7.
No difference was found for the U-Synthetic un-
frozen model or the F-Synthetic frozen model in
terms of overall average similarity with the unfrozen
model U-Real, considering trainings with different
random seeds, see Table 5. Thus, there was no overall
impact of frozen or unfrozen in this regard.
4.2 Layer vs Layer Analysis
Looking at CKA similarity between layers shows how
each layer compares to all other layers in the network,
see Figures 3, 4, 5, and 6.
A row in these plots consists of the CKA similarity
values between one layer in the model on the y-axis
and all layers in the model on the x-axis.
A block-like structure was visible for different
parts of the YOLOv3 architecture. Layers 0 to 12
were mostly similar to each other within the same
model, as well as with other models, in all compar-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
54
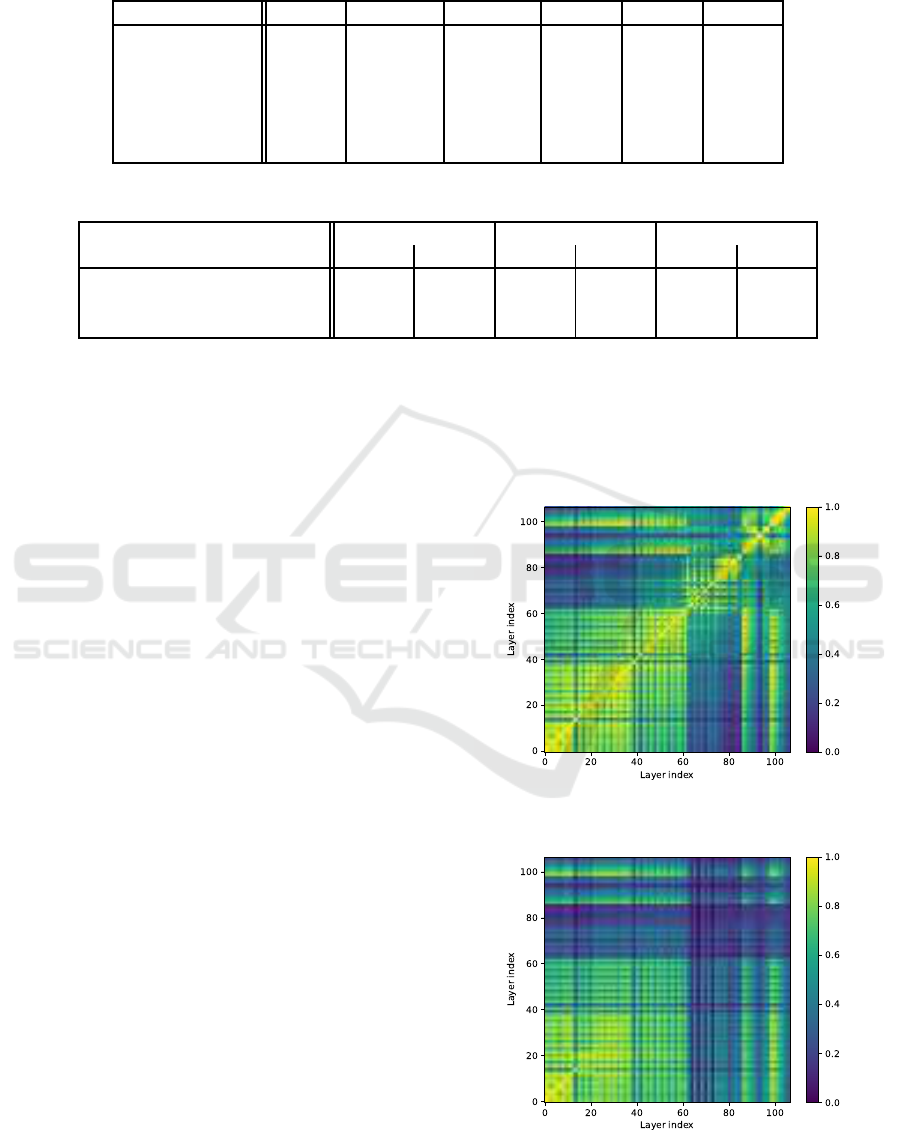
Table 4: Summary statistics of all layer outputs when feeding the network with 200 images of size 32× 32 from our BDD test
set. Values were averaged over all layers.
Model seed mean median std min max
U-Real 0 0.0613 -0.105 0.812 -16.8 36.8
U-Real 1 0.0634 -0.107 0.817 -17.0 33.8
U-Synthetic 0 0.0909 -0.103 0.743 -15.3 40.1
U-Synthetic 1 0.0989 -0.104 0.720 -15.8 37.3
F-Synthetic 0 0.0996 -0.105 0.726 -15.0 38.2
F-Synthetic 1 0.0925 -0.102 0.731 -15.2 39.5
Table 5: Mean CKA similarity for the models, for all layers, backbone and head.
Model all backbone head
seed 0 seed 1 seed 0 seed 1 seed 0 seed 1
U-Real vs U-Synthetic 0.5865 0.5895 0.6925 0.7112 0.3379 0.3042
U-Real vs F-Synthetic 0.5734 0.6054 0.6931 0.7318 0.2930 0.3092
U-Synthetic vs F-Synthetic 0.7597 0.7845 0.8264 0.8461 0.6115 0.6508
isons. Blocks can be seen for layers 0 to 12, 14 to
37, 42 to 61, 62 to 74, 75 to 82, 83 to 94, and 95
to 106. This represents the architectural structure of
YOLOv3.
As could be seen in the CKA plot in Figures 1
and 2, the impact of the routing layers (86 and 98) in
the head part can be seen near the diagonal here. The
part with the maximum downscale between layers 62
and 85 can be seen here as well, this part had lower
similarity with most other layers in the network.
Figure 3 shows the similarity of all the layers
against each other in model U-Real; self-similarity
symmetric around the diagonal.
The diagonals of the plots of model U-Real vs U-
Synthetic, U-Real vs F-Synthetic, and U-Synthetic vs
F-Synthetic, seen in Figures 4, 5, and 6, are the same
as the curves seen in Figure 1. The valuesoff the diag-
onal thus show the similarity of layers with differing
layer numbers.
The last layers in the backbone differs between
comparisons of U-Real vs U-Synthetic, and U-Real
vs F-Synthetic.
Most of the differences for real and synthetic were
between layer 62 and 85, where the image was down-
scaled to the lowest scale. There U-Real seems more
similar to layers in U-Synthetic and F-Synthetic, than
U-Synthetic and F-Synthetic were similar to layers in
U-Real.
Model U-Synthetic and F-Synthetic similarity to
model U-Real for each layer can be seen in Figures
4 and 5. The similarity between all layers in model
U-Synthetic (unfrozen) and F-Synthetic (frozen) can
be seen in Figure 6. In comparison with the simi-
larity plots of U-Real vs U-Synthetic, and U-Real vs
F-Synthetic, the similarity between U-Synthetic and
F-Synthetic was overall higher. There was high simi-
larity in most of the backbone, specially the first part,
even though model U-Synthetic had trainable back-
bone and model F-Synthetic had frozen backbone.
However, a few layers in the backbone differs, for ex-
ample the last layers in the backbone. The largest dif-
ferences were thus in the head part, except for higher
similarity around the route layers 86 and 98.
Figure 3: CKA similarity between layers of model U-Real
that was trained with seed 0, for all layers in YOLOv3.
Figure 4: CKA similarity between layers of model U-Real
(y-axis) vs model U-Synthetic (x-axis) that were trained
with seed 0, for all layers in YOLOv3.
Object Detector Differences When using Synthetic and Real Training Data
55
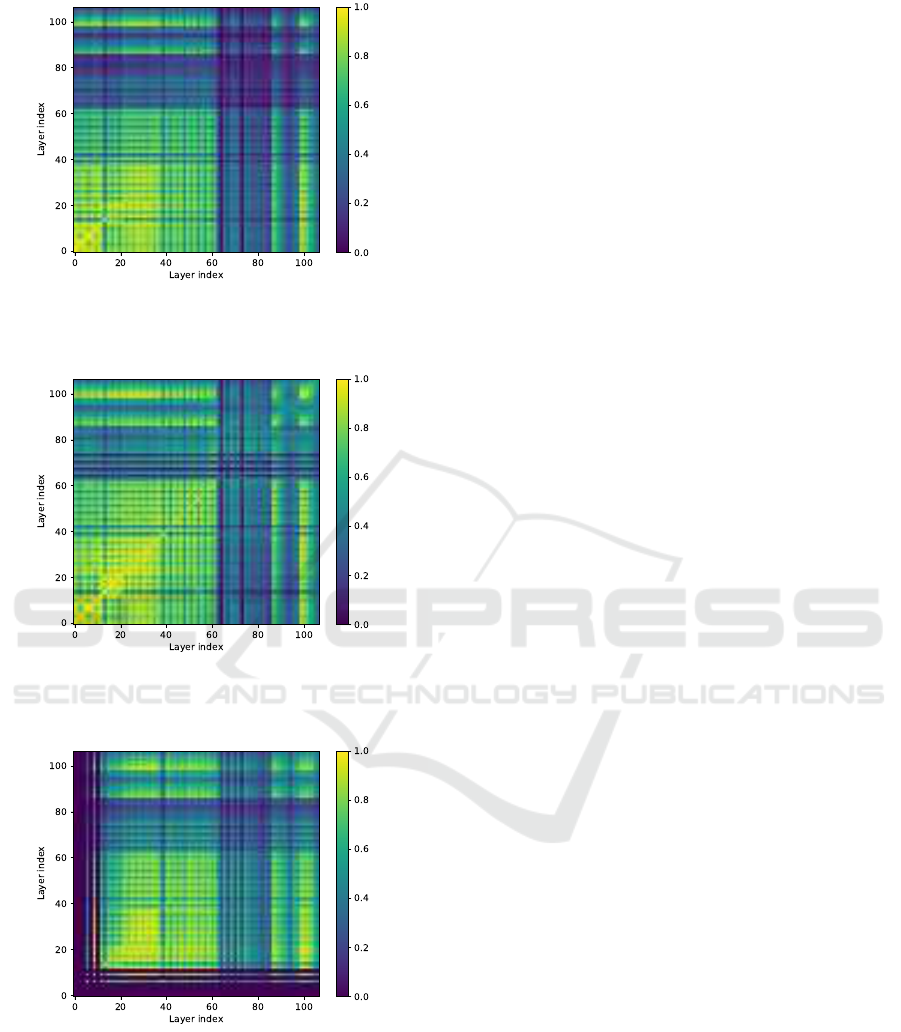
Figure 5: CKA similarity between layers of model U-Real
(y-axis) vs model F-Synthetic (x-axis) that were trained with
seed 0, for all layers in YOLOv3.
Figure 6: CKA similarity between layers of model U-
Synthetic (y-axis) vs model F-Synthetic (x-axis) that were
trained with seed 0, for all layers in YOLOv3.
Figure 7: CKA similarity between layers of model U-Real
(y-axis) vs model U-Synthetic (x-axis) that were trained
with seed 0 and input size of 128 × 128. Results for lay-
ers 6, 9, 12 to 106 in YOLOv3.
5 DISCUSSION
The results overall showed small differences between
model U-Real trained on real data and the models
trained on synthetic data: Models U-Synthetic and F-
Synthetic. The first part of the models showed high
CKA similarity in all comparisons, while the head
part showed more differences. All models had the
same backbone pre-trained on real image data from
ImageNet and model F-Synthetic did not have further
training of the backbone. The high similarity between
all models in the backbone means that the pre-trained
backbone is rather dominant in all models, even after
further training of the backbone in model U-Real and
model U-Synthetic.
The first 13 layers in the backbone had very high
similarity between all models, with similarity well
above 0.9. Thus, the first layers in the network were
not affected much by the dataset type and are likely
mostly from the pre-trained backbone. These lay-
ers are likely targeting generic features. All models
had the same backbone pre-trained on real image data
from ImageNet, but that does not explain why the first
13 layers would be more similar than the rest of the
backbone. The high similarity shows that the early
layers of the different models develop similar repre-
sentations, irrespective of if the dataset is real or syn-
thetic.
The similarity between model U-Synthetic and
model F-Synthetic was higher than when these mod-
els were compared to model U-Real. It seems like
models trained on the same dataset develop similar
representations. However, it could be further explored
how much of this is due to real vs synthetic data and
different datasets in general.
The F-Synthetic model with frozen backbone and
the U-Synthetic model with unfrozen backbone, both
further trained on the synthetic GTAV dataset, both
had comparable mAP on BDD and GTAV respec-
tively. No particular difference could be seen in the
CKA analysis between frozen and unfrozen back-
bone. In Hinterstoisser et al. (2018), freezing the
backbone during training on synthetic images yielded
better performance on a real dataset compared to us-
ing an unfrozen backbone. However, Tremblay et al.
(2018) showed promising results for unfrozen back-
bone. The diversity of the domain randomized dataset
that they used could be the explanation to why they
find differing results. To sum up, it seems that there is
not a consensus whether freezing the backbone or not
is preferred in all cases.
Comparing model U-Synthetic with unfrozen
backbone and model F-Synthetic with frozen back-
bone, there were high similarity in most of the back-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
56

bone between the two, specially the first part. How-
ever, a few layers in the backbone differ, for example
the last layers in the backbone. Both models were
derived from the same pre-trained backbone and per-
haps the training of model U-Synthetic with trainable
backbone did not result in large updates in the back-
bones.
In all comparisons, CKA similarity was lower
than the rest of the network in the part between layer
62 and 85. The images used for CKA analysis were
downscaled successively in the network and between
layer 62 and 85 they have the smallest size. However,
analysing larger image sizes show the same effect (see
Figure 7) so the downscale cannot explain this solely.
The largest differences between model U-
Synthetic and F-Synthetic were in the head part.
Since model U-Synthetic had trainable backbone
while model F-Synthetic had frozen backbone it
would be expected that their backbones differ. Both
networks were trained on the same detection task on
the same dataset, so the head parts could likely be-
come similar due to that. However, the head parts in-
tegrate information from multiple layers in the back-
bone that all have differences. Also, the receptive
field increases with layer number and thus is quite
large in the head part. These factors may explain why
the largest differences were in the head part.
Kornblith et al. (2019) applied image classifica-
tion on two different datasets with real images of res-
olution 32 × 32 using a 9 layer CNN network. The
CKA similarity between the trained models was close
to 1 for all comparisons for layers 1-4 irrespective of
dataset, then dropped somewhat for later layers, es-
pecially after about layer 6. Similarity between the
trained and untrained models was about 0.8 for the
first layer and then dropped in a slope towards near
zero for the last layer. This implies that a CKA sim-
ilarity value of 0.8 could mean that the first layer of
the trained model, which usually targets generic fea-
tures, was somewhat similar to random noise. In an-
other experiment with two untrained models with dif-
ferent initializations, the CKA similarity of the first
layer was near 1 and for the first couple of layers were
about 0.8 approximately. Our results are consistent
with these results in that the early layers of the mod-
els showed high similarity, in our case above 0.9.
Higher CKA similarity values mean high similar-
ity and vice versa, but in between high and low it is
not entirely clear how different CKA similarity values
should be interpreted.
Nguyen et al. (2021) showed further analyses of
CKA on different ResNet architectures for image
classification. They investigated the block structure
of deep models, mainly ResNet. Since the backbone
of YOLOv3 has similarities with ResNet, our analysis
showed similar results on block structure.
Here we trained on image size 416 × 416 while
analysing CKA on image size 32×32 which is a scale
that the models were not trained for, which is a lim-
itation, but we focus on the similarity between the
models. Furthermore, in this work, one network ar-
chitecture was analysed and trainings using one real
image dataset with one synthetic image dataset were
compared. In future work, the analysis would bene-
fit of looking at multiple real and synthetic datasets
and compare them as groups. Furthermore, different
network architectures could also be analysed.
6 CONCLUSIONS
In our paper, we dissected models trained on real and
synthetic images. We started from a backbone pre-
trained on ImageNet real image data. Then:
• One model, U-Real, was further trained on real
image data (BDD).
• Two other models were further trained on syn-
thetic data (GTAV):
– Model U-Synthetic with all layers trainable
(unfrozen), and
– Model F-Synthetic with a frozen backbone.
The trained models were evaluated on our test set
of the synthetic GTAV dataset and our test set of the
real BDD dataset. The trained models yielded best
mAP on the type of data they were trained for.
Summary statistics of all layer outputs showed
a small difference in distribution between model U-
Real trained on real data and the models trained on
synthetic data; models U-Synthetic and F-Synthetic.
Comparably, models U-Synthetic and F-Synthetic
have quite similar layer output value distribution.
The CKA similarity was calculated for comparing
the model trained on real data, model U-Real, with
models trained on synthetic data, models U-Synthetic
and F-Synthetic. The average CKA similarity was
higher in the backbone than in the head part when
comparing the model trained on real data with the two
models trained on synthetic data. Specially the first
13 layers in the backbone had very high similarity be-
tween all models, thus the first layers in the network
were not affected much by the dataset type.
The similarity was quite high in most of the back-
bone until layer 61. From layer 62 to 85, the image
size was the lowest and the similarity was relatively
low.
The head part had lower similarity than the back-
bone, which was also lower than the mean of all lay-
Object Detector Differences When using Synthetic and Real Training Data
57

ers. The similarity was relatively low for the three
detection layers in the head.
Comparing CKA similarity values for layers vs
layers showed a block-like structure resembling the
different parts of the YOLOv3 architecture.
Model F-Synthetic with frozen backbone and
model U-Synthetic with unfrozen backbone that were
further trained on synthetic data had comparable mAP
with each other, on both BDD and GTAV datasets. No
particular difference could be seen in the CKA analy-
sis between frozen and unfrozen backbone.
No difference was found for the U-Synthetic un-
frozen model or the F-Synthetic frozen model in
terms of average similarity with the unfrozen model
U-Real. Thus, there was no overall impact of frozen
or unfrozen according to CKA similarity.
The largest difference between model U-Synthetic
and model F-Synthetic according to CKA was in the
head part. Hence models U-Synthetic and F-Synthetic
were more similar to each other in the backbone part
than in the head part, even though their backboneshad
different training settings.
With this similarity analysis, we want to give in-
sights on how training synthetic data affects each
layer and to give a better understanding of the inner
workings of complex neural networks. A better un-
derstanding is a step towards using synthetic data in
an effective way and towards explainable and trust-
worthy models.
REFERENCES
Alain, G. and Bengio, Y. (2016). Understanding intermedi-
ate layers using linear classifier probes. In ICLR 2017
workshop.
Cabon, Y., Murray, N., and Humenberger, M. (2020). Vir-
tual KITTI 2. CoRR, abs/2001.10773.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Dosovitskiy, A., Ros, G., Codevilla, F., L´opez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
Fong, R. C. and Vedaldi, A. (2017). Interpretable explana-
tions of black boxes by meaningful perturbation. In
The IEEE International Conference on Computer Vi-
sion (ICCV).
Gaidon, A., Wang, Q., Cabon, Y., and Vig, E. (2016). Vir-
tual worlds as proxy for multi-object tracking analy-
sis. In Proceedings of the IEEE conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
4340–4349.
Ge, Y., Xiao, Y., Xu, Z., Zheng, M., Karanam, S., Chen,
T., Itti, L., and Wu, Z. (2021). A peek into the reason-
ing of neural networks: Interpreting with structural vi-
sual concepts. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2195–2204.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013). Vi-
sion meets robotics: The KITTI dataset. International
Journal of Robotics Research (IJRR).
Golub, G. H. and Reinsch, C. (1971). Singular Value De-
composition and Least Squares Solutions, pages 134–
151. Springer Berlin Heidelberg, Berlin, Heidelberg.
Hardoon, D. R., Szedmak, S., and Shawe-Taylor, J. (2004).
Canonical correlation analysis: An overview with ap-
plication to learning methods. Neural Computation,
16(12):2639–2664.
Hattori, H., Lee, N., Boddeti, V. N., Beainy, F., Kitani,
K. M., and Kanade, T. (2018). Synthesizing a scene-
specific pedestrian detector and pose estimator for
static video surveillance. International Journal of
Computer Vision, 126:1027–1044.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Hermann, K. and Lampinen, A. (2020). What shapes fea-
ture representations? Exploring datasets, architec-
tures, and training. In Advances in Neural Information
Processing Systems, volume 33, pages 9995–10006.
Curran Associates, Inc.
Hinterstoisser, S., Lepetit, V., Wohlhart, P., and Konolige,
K. (2018). On pre-trained image features and syn-
thetic images for deep learning. In Proceedings of the
European Conference on Computer Vision (ECCV)
Workshops.
Johnson-Roberson, M., Barto, C., Mehta, R., Sridhar, S. N.,
Rosaen, K., and Vasudevan, R. (2017). Driving in the
matrix: Can virtual worlds replace human-generated
annotations for real world tasks? In IEEE Interna-
tional Conference on Robotics and Automation, pages
1–8.
Kornblith, S., Norouzi, M., Lee, H., and Hinton, G. E.
(2019). Similarity of neural network representations
revisited. In Proceedings of the 36th International
Conference on Machine Learning, ICML, volume 97
of Proceedings of Machine Learning Research, pages
3519–3529. PMLR.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Dollar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE International Conference on
Computer Vision (ICCV).
Liu, T. and Mildner, A. (2020). Training deep neu-
ral networks on synthetic data. http://lup.lub.lu.se/
student-papers/record/9030153. Master’s Thesis.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S. E.,
Fu, C., and Berg, A. C. (2016). SSD: Single shot
multibox detector. In Computer Vision – ECCV 2016,
pages 21–37. Springer International Publishing.
Morcos, A., Raghu, M., and Bengio, S. (2018). Insights
on representational similarity in neural networks with
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
58

canonical correlation. In Bengio, S., Wallach, H.,
Larochelle, H., Grauman, K., Cesa-Bianchi, N., and
Garnett, R., editors, Advances in Neural Information
Processing Systems 31, pages 5727–5736. Curran As-
sociates, Inc.
Nguyen, T., Raghu, M., and Kornblith, S. (2021). Do wide
and deep networks learn the same things? Uncovering
how neural network representations vary with width
and depth. In International Conference on Learning
Representations ICLR.
Nowruzi, F. E., Kapoor, P., Kolhatkar, D., Hassanat, F. A.,
Lagani`ere, R., and Rebut, J. (2019). How much real
data do we actually need: Analyzing object detec-
tion performance using synthetic and real data. ICML
Workshop on AI for Autonomous Driving.
Raghu, M., Gilmer, J., Yosinski, J., and Sohl-Dickstein, J.
(2017). SVCCA: Singular vector canonical correla-
tion analysis for deep learning dynamics and inter-
pretability. In Guyon, I., Luxburg, U. V., Bengio, S.,
Wallach, H., Fergus, R., Vishwanathan, S., and Gar-
nett, R., editors, Advances in Neural Information Pro-
cessing Systems, volume 30. Curran Associates, Inc.
Redmon, J. and Farhadi, A. (2018). YOLOv3: An incre-
mental improvement. arXiv.
Richter, S. R., Hayder, Z., and Koltun, V. (2017). Playing
for benchmarks. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision (ICCV).
Ros, G., Sellart, L., Materzynska, J., V´azquez, D., and
L´opez, A. (2016). The SYNTHIA dataset: A large
collection of synthetic images for semantic segmenta-
tion of urban scenes. In Proceedings of the 29th IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 3234–3243.
Tan, M., Pang, R., and Le, Q. V. (2020). EfficientDet: Scal-
able and efficient object detection. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR).
Touvron, H., Vedaldi, A., Douze, M., and Jegou, H. (2019).
Fixing the train-test resolution discrepancy. In Wal-
lach, H., Larochelle, H., Beygelzimer, A., d'Alch´e-
Buc, F., Fox, E., and Garnett, R., editors, Advances in
Neural Information Processing Systems, volume 32.
Curran Associates, Inc.
Tremblay, J., Prakash, A., Acuna, D., Brophy, M., Jam-
pani, V., Anil, C., To, T., Cameracci, E., Boochoon,
S., and Birchfield, S. (2018). Training deep networks
with synthetic data: Bridging the reality gap by do-
main randomization. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR) Workshops.
Ultralytics (2019). Ultralytics implementation of YOLOv3.
https://github.com/ultralytics/yolov3.
Wrenninge, M. and Unger, J. (2018). Synscapes: A pho-
torealistic synthetic dataset for street scene parsing.
CoRR, abs/1810.08705.
Yu, F., Xian, W., Chen, Y., Liu, F., Liao, M., Madhavan, V.,
and Darrell, T. (2020). BDD100K: A diverse driving
video database with scalable annotation tooling. In
Proc. of the IEEE Conference on Computer Vision and
Pattern Recognition (CVPR).
Zeiler, M. D. and Fergus, R. (2014). Visualizing and under-
standing convolutional networks. In Fleet, D., Pajdla,
T., Schiele, B., and Tuytelaars, T., editors, Computer
Vision – ECCV 2014, pages 818–833, Cham. Springer
International Publishing.
Zhang, C., Bengio, S., and Singer, Y. (2019). Are all layers
created equal? In ICML 2019 Workshop Deep Phe-
nomena.
Object Detector Differences When using Synthetic and Real Training Data
59
