
Video-based Detection and Tracking with Improved Re-Identification
Association for Pigs and Laying Hens in Farms
Qinghua Guo
1
, Yue Sun
1
, Lan Min
1
, Arjen van Putten
2
, Egbert Frank Knol
3
, Bram Visser
4
,
T. Bas Rodenburg
2
, J. Elizabeth Bolhuis
5
, Piter Bijma
5
and Peter H. N. de With
1
1
Department of Electrical Engineering, Eindhoven University of Technology, Eindhoven, The Netherlands
2
Department of Animals in Science and Society, Utrecht University, Utrecht, The Netherlands
3
Topigs Norsvin Research Center, Beuningen, The Netherlands
4
Hendrix Genetics, Boxmeer, The Netherlands
5
Department of Animal Sciences, Wageningen University & Research, Wageningen, The Netherlands
Keywords: Animal Detection, Animal Tracking, Multi-Object Tracking Models.
Abstract: It is important to detect negative behavior of animals for breeding in order to improve their health and welfare.
In this work, AI is employed to assist individual animal detection and tracking, which enables the future
analysis of behavior for individual animals. The study involves animal groups of pigs and laying hens. First,
two state-of-the-art deep learning-based Multi-Object Tracking (MOT) methods are investigated, namely
Joint Detection and Embedding (JDE) and FairMOT. Both models detect and track individual animals
automatically and continuously. Second, a weighted association algorithm is proposed, which is feasible for
both MOT methods to optimize the object re-identification (re-ID), thereby improving the tracking
performance. The proposed methods are evaluated on manually annotated datasets. The best tracking
performance on pigs is obtained by FairMOT with the weighted association, resulting in an IDF1 of 90.3%,
MOTA of 90.8%, MOTP of 83.7%, number of identity switches of 14, and an execution rate of 20.48 fps. For
the laying hens, FairMOT with the weighted association also achieves the best tracking performance, with an
IDF1 of 88.8%, MOTA of 86.8%, MOTP of 72.8%, number of identity switches of 2, and an execution rate
of 21.01 fps. These results show a promising high accuracy and robustness for the individual animal tracking.
1 INTRODUCTION
While the demand for animal products increases, the
people’s attention for animal health and welfare is
growing accordingly. Negative social interactions
among animals, such as tail-biting in pigs and
smothering in laying hens, threaten animal lives and
reduce feeding efficiency, thereby increasing the
ecological footprint of food production (Matthews, et
al., 2016). Early detection of such negative behavior
and interventions are essential, but challenging for
farm staff due to changes over time and variances in
environments, especially in large-scale farms
(Matthews, et al., 2016), (Matthews, et al., 2017). The
objective of the animal science community is to
develop a one-health solution that jointly links human,
animal, and environmental health (Kahn, 2017). To
facilitate efficient breeding for animals with minimal
occurrence of negative behavior, continuous
monitoring of animals at a large scale is desirable for
identifying damaging behavior. However, most
animals are raised in groups, which causes
inconvenience for observing individual animals.
Therefore, automated and continuous individual
tracking is needed.
In the past few years, several methods have been
developed for automated animal monitoring. Radio
frequency identification device (RFID) sensors have
been widely used for tracking animals, which require
the installation of RFID antennas at every location of
interest in the housing environment, which can be
deployed with tags, such as an ear tag for each pig
(Kapun, et al., 2018), (Maselyne, 2016). However,
sensors have risks of being destructed by the active
behavior of animals. In addition, for large-scale
commercial farms, RFIDs are expensive concerning
the installation and retrieval of tags. Another rising
field for animal tracking is based on videos, which are
contactless, and can be more simply implemented (e.g.
low-cost cameras) and maintained than RFID systems.
Several studies have investigated the three-
dimensional Kinect cameras monitoring from the top
view with depth sensors (Mallick, et al., 2014), (Kim,
et al., 2017). They are capable of monitoring animals
Guo, Q., Sun, Y., Min, L., van Putten, A., Knol, E., Visser, B., Rodenburg, T., Bolhuis, J., Bijma, P. and N. de With, P.
Video-based Detection and Tracking with Improved Re-Identification Association for Pigs and Laying Hens in Farms.
DOI: 10.5220/0010788100003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
69-78
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
69
through generated point clouds, while the range of
depth sensors is too limited to address the entire area
of a big pen (Matthews, et al., 2017). Additionally, the
installation of top-view cameras could be difficult for
large-scale farms. Therefore, the most common
methods for monitoring animals are based on two-
dimensional RGB cameras.
Recent advances in Artificial Intelligence (AI)
provide radical new opportunities to monitor animal
behavior through inexpensive and scalable strategies.
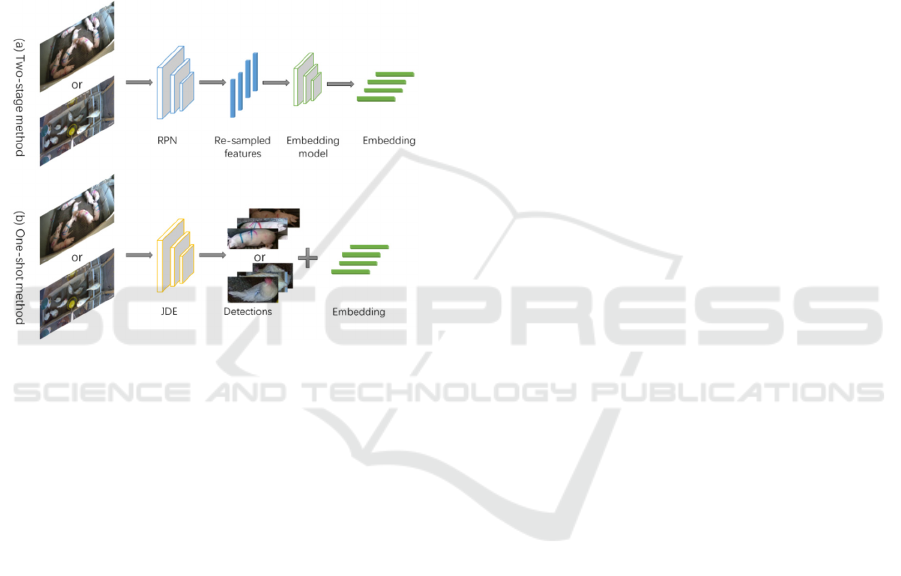
The state-of-the-art Multi-Object Tracking (MOT)
methods in deep learning include both two-stage and
one-shot systems as shown in Figure 1. Two-stage
Figure 1: Layouts of both two-stage and one-shot tracking
methods (Wang, et al., 2020).
methods firstly employ detectors, such as Faster R-
CNN (Ren, et al., 2015) or YOLOv3 (Redmon et al.,
2018) to localize objects in video frames, and then
extract these features by an embedding model, such
as Fast R-CNN (Girshick, 2015) for embedding
learning. These two computations can adopt the most
suitable model individually, achieving good perform-
ance on public pedestrian datasets (Wang, et al.,
2020). However, separate detection and tracking
tasks incur critical challenges on computation
efficiency, while the execution time of embedding
increases as the number of identities grows, which
implies that two-stage methods are not optimal for
real-time MOT in practice. To reduce computing time
and enhance tracking efficiency, one-shot methods
are proposed. Compared with two-stage tracking
methods, one-shot methods combine object detection
and embedding feature learning into a single deep
network to reduce computation cost. In this way,
detected objects and related appearance embeddings
are learnt simultaneously in the network. The
execution of the entire MOT procedure draws more
attention than focusing on an association step only.
Our research aims at developing a 2D camera-
based solution that leverages the state-of-the-art deep
learning techniques for the automated detection and
tracking of every individual pig/laying hen that is
kept in large groups. In this work, we propose two
one-shot video-based automated approaches for
detecting and tracking individual pigs and laying
hens. The first method is based on joint detection and
embedding (JDE) network (Wang, et al., 2020),
which is based on a one-shot concept of joint
detection and tracking procedure. The second method
FairMOT (Zhang, et al., 2020) is a network derived
from the JDE by adding a re-ID embedding branch
and addressing fairness issues to improve tracking
performance. The proposed methods are evaluated
using state-of-the-art metrics that provide multiple
perspectives for assessing MOT (Heindl, 2017).
Our contributions to the improvement of the
datasets are: (1) a pig dataset is manually annotated
on 3,706 video frames including pigs with and
without sprayed color marks, and (2) a laying hen
dataset is created, containing 1,124 annotated frames
of both white and brown laying hens. We apply two
state-of-the-art methods to track individual objects
for the two types of animals. Further contributions
from the algorithmic side are as follows. An online
association strategy is proposed based on animal
characteristics, which efficiently reduces identity
switches and enhances the tracking performance, for
both JDE and FairMOT methods. Moreover,
regarding the JDE, new clusters of anchor boxes are
also learnt for each specific animal dataset, and the
object numbers are constrained on each frame.
The sequel of this paper is as follows. Section 2.1
describes the data acquisition workflow, followed by
Section 2.2 on the annotation method. Section 2.3
introduces the network architecture of the proposed
methods. Section 2.4 describes the evaluation
metrics, enabling visualization of the tracking
performance. Section 3 illustrates experimental
results, divided into Section 3.1 for pigs and Section
3.2 for laying hens. Section 4 discusses the findings
of problems and the relevant future work accordingly.
Section 5 discusses and concludes this paper.
2 METHODS
2.1 Dataset Description
2.1.1 Pig Dataset
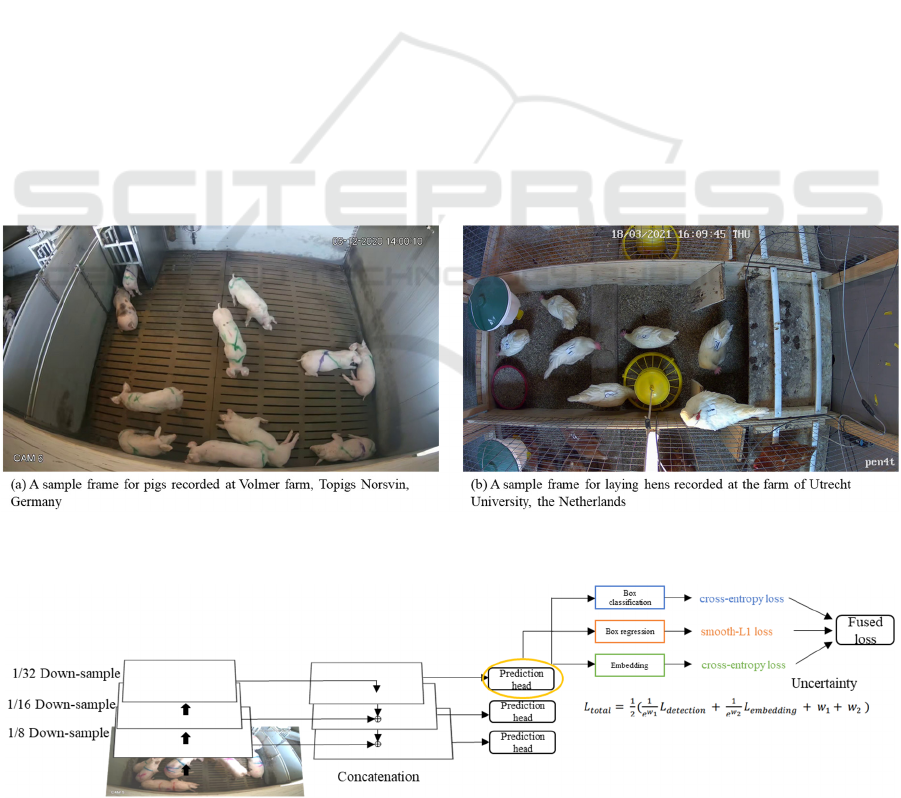
All video recordings of pigs are collected at Volmer
farm, Topigs Norsvin, Germany. Figure 2(a) shows a
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
70
sample frame illustrating the scene of the video
recording. Pigs from in total eight pens are recorded,
where each pen contains 10 or 11 pigs with or without
sprayed color marks on the bodies. The group
composition of the pigs usually remains unchanged
unless situations of for example, sickness or injury
occur. Most pens are set up with one single camera,
while several remaining pens are equipped with
double cameras. All the cameras film from the side
views towards the pen’s ground, covering the entire
pen. The cameras used for recording are LOREX
4KSDAI168 with an image resolution of 1,280 ×
720 pixels, and a frame rate of 15 fps. Pig videos are
recorded continuously on a 24/7 basis, and each video
is automatically generated and stored per hour.
2.1.2 Laying Hen Dataset
The videos of laying hens are collected at the farm of
Utrecht University, the Netherlands. Figure 2(b)
shows a sample frame illustrating the scene of the
video recording. Laying hens from in total 24 pens are
recorded, where each pen contains 8-10 laying hens.
White and brown chickens are separated in different
pens. The grouping of laying hens usually remains
unchanged unless situations of e.g., sickness or injury
occur. All pens are equipped with double cameras.
The cameras film from the top and side views towards
the pen’s ground, coving the entire pen. The cameras
used for recording are RLK8-800B4 with an image
resolution of 2,304×1296 pixels, and a frame rate of
15 or 20 fps. Laying hens videos are recorded
continuously during daytime.
2.2 Data Annotation
Video segments showing active animal movements
are selected, followed by annotating the animal
location in each video frame with consistent identity
association for every animal. Computer Vision
Annotation Tool (CVAT) (Intel, 2018) is used to label
object location and also the situation of occluded
objects. CVAT supports to save the frame ID,
identity, bounding box location and size of the object.
2.3 Network Architecture Overview
2.3.1 Joint Detection and Embedding (JDE)
JDE network adopts DarkNet-53 (Redmon, et al.,
2018) as the backbone network. It is based on Feature
Pyramid Network (FPN) (Lin, et al., 2017), which
provides possibilities to predict from multiple scales.
As shown in Figure 3, at the beginning, the input
video frames are transmitted forward through the
Figure 2: Sample frames for (a) pigs recorded at Volmer farm, Topigs Norsvin, Germany, and (b) laying lens recorded at the
farm of Utrecht University, the Netherlands.
Figure 3: Explanation of JDE network architecture and prediction heads (Wang, et al., 2020).
Video-based Detection and Tracking with Improved Re-Identification Association for Pigs and Laying Hens in Farms
71
backbone to obtain feature maps at three scales of
down-sampling of 1/32, 1/16 and 1/8. The feature
map, which supplies multi-task learning: box
classification, box regression and embedding learning.
The detection branch of JDE is based on the standard
Region Proposal Network (RPN) (Ren, et al., 2015)
map with the smallest size is up-sampled and fused
with the feature map from the second smallest scale
by a skip connection, similarly for other scales.
Prediction heads are added to the fused feature maps
at all scales. Each prediction head includes several
convolutional layers and outputs a dense prediction
with two modifications. First, we apply k-means
clustering to the training dataset to recalculate 12
anchors, where each scale has 4 anchors. For the
widely used pedestrian datasets in MOT, a filter
condition is normally applied to constrain the object
aspect ratio of 1:3 (width : height). We remove this
constraint because more deformations are expected in
the animal datasets. Second, we set the IoU threshold
to distinguish foreground from background regions.
In this way, false alarms can be suppressed especially
for occluded cases. As depicted in Figure 3, the
detection branch is covering two tasks:
foreground/background classification with a cross-
entropy loss, and bounding-box regression with a
smooth L1 loss.
The learning procedure of appearance embedding
in JDE is to derive a small distance measure for
detected bounding boxes with the same identity,
while bounding boxes with different identities have a
large distance. JDE compares three types of loss
functions to achieve this goal. The triplet loss
(Schroff, et al., 2015) is feasible, but the training is
unstable and its convergence is slow. A smooth upper
bound of triplet loss (Sohn, 2016) is presented to
alleviate issues caused by the triplet loss. It is similar
to the cross-entropy loss, where all negative classes
participate in the loss computation. However, the
smooth upper bound of the triplet loss only considers
sampled negative classes in the mini-batch. The
experimental results with pedestrian datasets show
that the cross-entropy loss gives the best results.
Hence, the appearance embedding learning of JDE is
based on using cross-entropy.
The way for combining detection loss and
embedding loss is automatic loss balancing (Kendall,
et al., 2018), based on the concept of task-
independent uncertainty, which is calculated by
𝐿
1
2
1
𝑒
𝐿
1
𝑒
𝐿
𝑤
𝑤
(1)
where w
1
and w
2
are learnable parameters.
JDE adopts a simple and fast online association
algorithm. Each tracklet consists of an appearance
state and a motion state. The appearance affinity
matrix is calculated by cosine similarity and the
motion affinity matrix is computed using the
Mahalanobis distance. A buffer pool is set for
potential tracklets to the following association. For
each frame, there are computations between all
detections and tracklets in the buffer pool. The
Hungarian algorithm (Kuhn, 1955) solves the linear
assignment to output matched tracks, unmatched
tracks and detections. A Kalman filter (Welch, et al.,
1995) is used to update and predict the locations in
the current frame from the existing tracklets.
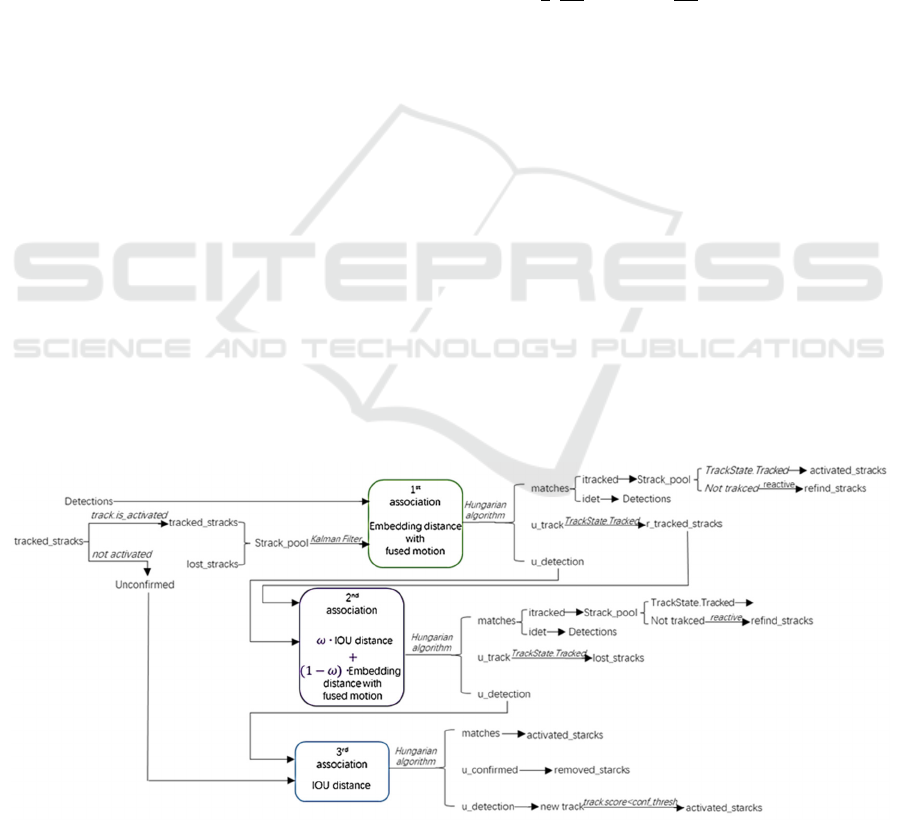
Improved Re-identification Association:
Figure 4 describes the workflow of an online
association strategy. This procedure has three
Figure 4: The online association strategy deployed both in JDE and FairMOT. We improve the second association with the
weighted IoU distance and embedding distance with fused motion, instead of only considering the IoU distance at the second
association in JDE and FairMOT.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
72
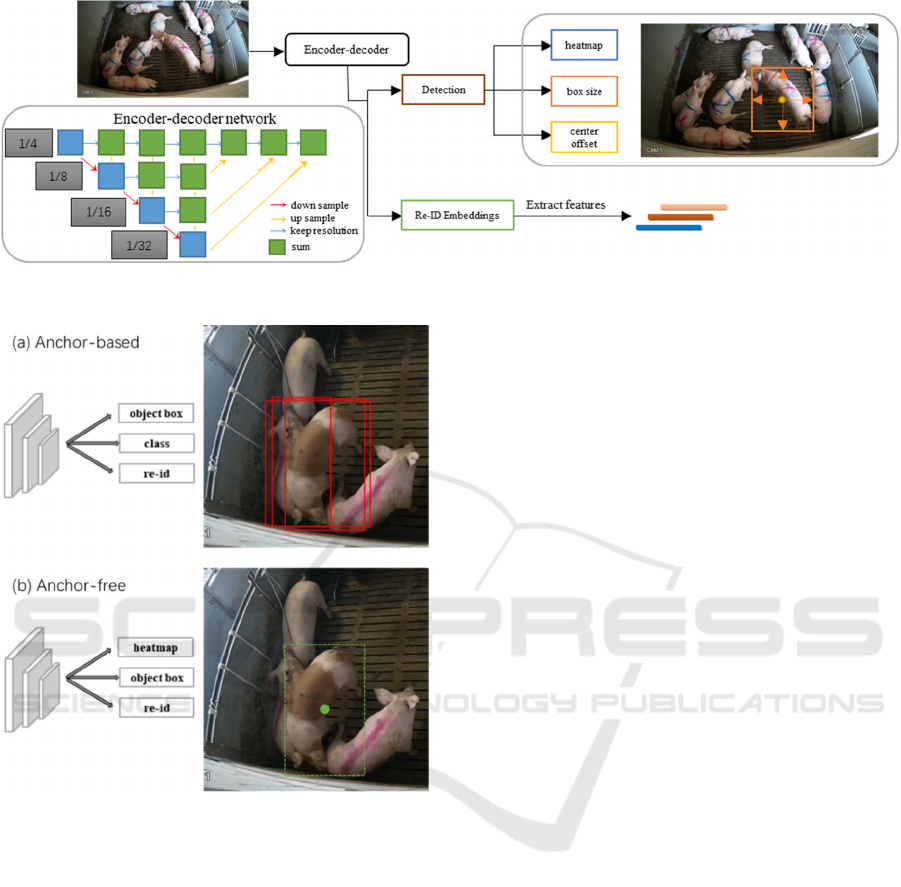
Figure 5: Explanation of the FairMOT (Zhang, et al., 2020) network architecture and prediction heads.
Figure 6: Comparison between (a) anchor-based (JDE) and
(b) anchor-free method (FairMOT) (Zhang, et al., 2020).
association steps in total. The first association is
related to the embedding distance with fused motion.
After calculating by the Hungarian algorithm
(Kuhn, 1955), the unmatched tracks and detections
are further imported to the second association. We
introduce an improved strategy, which considers the
weighted distance between the IoU and fused
embedding with motion, instead of only relying on
the IoU distance after the first embedding comparison.
Because animal behavior is faster and more
deformable than pedestrians, the comparison of
appearance embeddings is more reliable. In the third
ID association step, the IoU distance is adopted to
handle the unconfirmed tracks, which are usually
tracks with only one initial frame. A buffer pool is
used for storing lost tracks, and the tracks are
removed when they have been lost for more than a
certain frame count (threshold). Finally, the outputs
combine all followed tracks, activated tracks and
refined tracks.
In addition, we present a way to limit object
numbers in each frame by Non-Maximum
Suppression (NMS) (Neubeck, et al., 2006).
According to the amount of objects for tracking, we
keep the same amount of NMS indices.
2.3.2 FairMOT
The backbone network used in FairMOT is ResNet-
34, which trades-off tracking performance and
computing time. To fuse multi-layer features like JDE,
a developed version of Deep Layer Aggregation
(DLA) (Zhou, et al., 2019) is attached to the backbone
as shown in Figure 5. The development adds more
skip connections between multiple scales, which is
similar to the FPN. Moreover, there are deformable
convolution layers in all up-sampling stages, which
enables dynamic adjustment among object scales and
poses. The entire network is called DLA-34.
Compared with JDE, FairMOT addresses three
unfair issues caused by anchors, features, and feature
dimensions. Figure 6 illustrates the unfairness caused
by the anchor-based method in JDE. As shown in
Figure 6(a), all active anchors around the object
center are considered as candidates of Re-ID features.
These adjacent anchors have high possibilities to be
confirmed as the same identities if their IoU value is
large enough, which results in suboptimal extracted
features. For instance, Figure 6(a) shows that three
anchors are predicted as the same identity. FairMOT
solves this unfairness by extracting the Re-ID feature
only from the center of the object (see Figure 6(b)).
In addition, FairMOT improves the setting of the
feature dimension, while the performance is higher
when the network learns lower-dimensional features.
Video-based Detection and Tracking with Improved Re-Identification Association for Pigs and Laying Hens in Farms
73
The detection module in FairMOT is based on the
CenterNet, but also combined with anchor-free
methods. It leaves out the steps for computing clusters
from all bounding boxes. As can be observed in Figure
5, three parallel heads contribute to the detection
branch. The heatmap head predicts the locations of the
object centers with a focal loss. The box-offset head
and the box-size head are responsible for more accurate
localization and estimating the height and width of the
target box, optimized by the L1 loss.
As shown in Figure , FairMOT introduces a re-ID
branch to generate object features, aiming at
distinguishing different objects. The re-ID features
are extracted from the feature map, which are derived
from a convolution layer with 128 kernels based on
the backbone network.
The automated loss balancing and online
association strategy in FairMOT are the same as used
in the JDE network. We explore a weighted strategy
in the FairMOT approach, which is expected to
reduce the identity switches during tracking.
2.4 Evaluation Metrics
The proposed methods are evaluated using the metrics
derived from the MOT challenge based on a pedestrian
dataset (Dendorfer, et al., 2019), combined
with
evaluation metrics used in JDE (Wang, et al., 2020)
and FairMOT methods (Zhang, et al., 2020),
(Bernardin, et al., 2008). These metrics are employed
and listed in Table 1 and supplemented with the IDF1
metric (Ristani, et al., 2016) to evaluate the overall
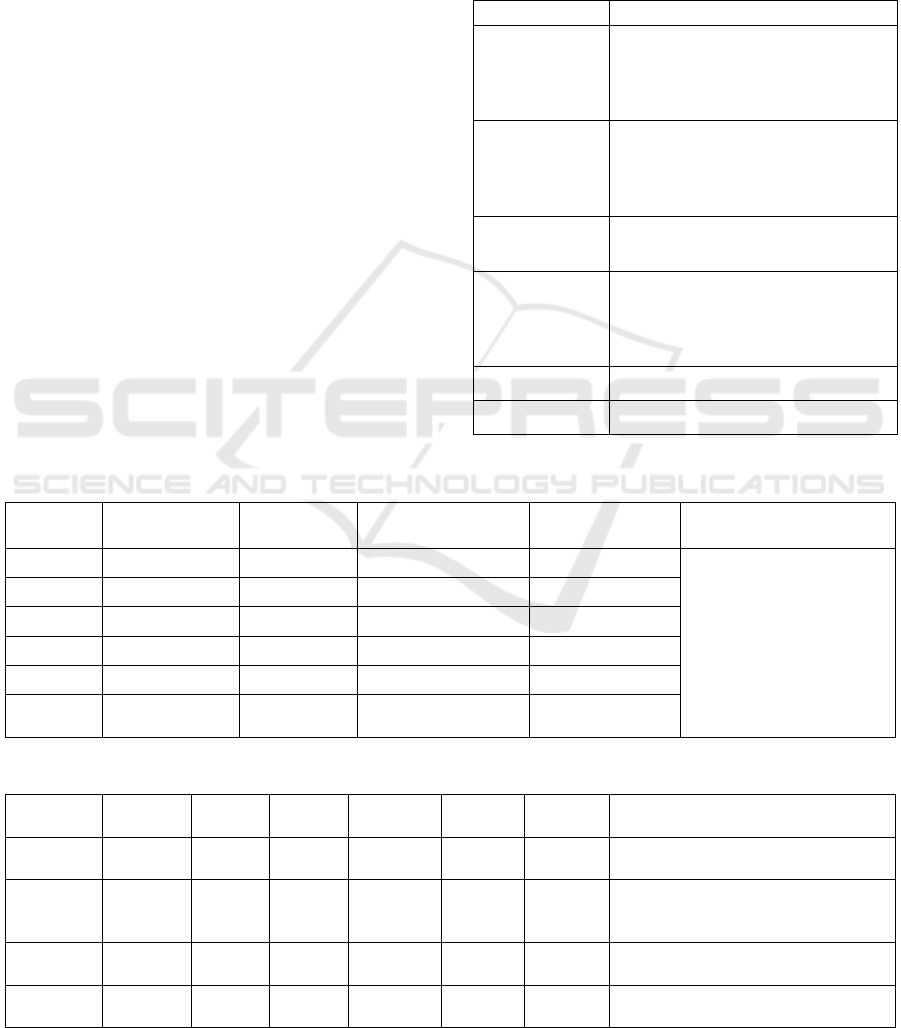
tracking performance. Table 1 illustrates all terms for
evaluating MOT systems. The upward arrow means a
higher value of this term is desired and the downward
arrow indicates that a result of a lower value is better.
Table 1: Evaluation metrics for the proposed methods.
Metric Description
MOTA↑
Multi-Object Tracking Accuracy.
This measure combines three error
sources: false positives, missed
targets, and identity switches.
MOTP↑
Multi-Object Tracking Precision.
The misalignment between the
annotated and the predicted bounding
boxes.
MT↑, PT, ML↓
Number of mostly tracked, partially
tracked, and mostly lost trajectories.
IDF1↑
ID F1 score. The ratio of correctly
identified detections over the average
number of ground-truth and
computed detections.
IDs↓ Number of identity switches.
FPS↑ Runtime, frame per second.
Table 2: Summary of training data information for pigs.
Rec. date Sprayed marks No. of pens No. of identities No. of frames No. of bounding boxes
20200820 no 8 87 1,737
36,019
20201205 yes 6 66 600
20210105 yes 6 65 561
20210205 yes 3 33 303
20210305 yes 1 10 101
Overall
with:without
= 10:11
24 261 3,302
Table 3: Summary of testing data information for pigs.
Rec. No. Rec. date
Sprayed
marks
No. of
identities
Duration
(min : s)
No. of
frames
Bounding
b
oxes
Conditions
R1_pig 20210205 yes 11 3:20 101 1,111
Limited active movements;
Pigs are not too close to each othe
r
R2_pig 20210415 yes 11 3:20 101 1,111
Partial active movements;
one pig is mostly occluded in a few
seconds
R3_pig 20210420 no 11 3:20 101 1,111
Partial active movements;
some
p
airs of
p
i
g
s are ver
y
close
R4_pig 20210420 no 11 3:20 101 1,111
Partial active movements;
several
p
i
g
s are stacked to
g
ethe
r
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
74

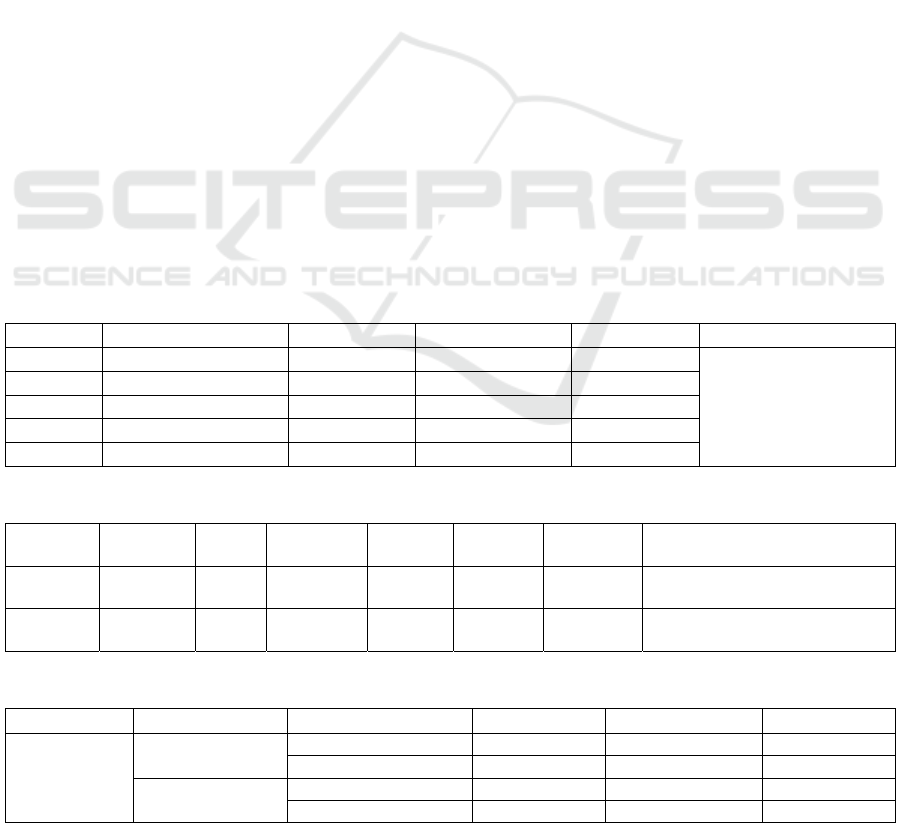
Table 4: Comparison between the original association method and the proposed weighted strategy on the pig dataset.
Testing Method Association IDF1↑ MOTA↑ IDs↓
All testing
data
JDE
Original 82.0 90.1 54
Weighted 82.9 89.9 36
Fair-
MOT
Original 89.7 90.8 18
Weighted 90.3 90.8 14
Table 5: Comparison of tracking results from JDE and FairMOT on the pig testing set.
Method Test recording IDF1↑ MOTA↑ MOTP↑ GT MT↑ PT ML↓ IDs↓ FPS↑
JDE
R1_pig 82.8 93.5 85.5 11 11 0 0 7 15.98
R2
_
pig 88.9 92.0 79.1 11 11 0 0 5 15.83
R3
_p
i
g
81.5 89.7 78.4 11 11 0 0 6 15.93
R4
_p
i
g
78.4 84.4 78.8 11 9 2 0 18 15.70
Overall 82.9 89.9 80.5 44 42 2 0 36 15.86
FairMOT
R1
_
pig 91.2 94.4 87.8 11 11 0 0 2 20.57
R2
_
pig 94.3 90.5 82.2 11 10 1 0 1 20.41
R3
_
pig 88.1 87.3 81.8 11 10 1 0 4 20.50
R4
_p
i
g
87.8 91.1 82.7 11 11 00 7 20.42
Overall 90.3 90.8 83.7 44 42 2 0 14 20.48
3 EXPERIMENTAL RESULTS
3.1 Pig Experiments
3.1.1 Dataset Description
Our manually annotated datasets of pigs are divided
into two parts, which are the training dataset
described in Table 2, and the testing dataset from
Table 3. Pig videos are recorded at a frame rate of 15
fps. A frame step of 30 frames (2 seconds) is taken
during annotation to output one frame. All images are
selected from daytime in an uncontrolled farming
environment. The training dataset shown in Table 2
consists of 3,302 frames including 36,019 annotated
bounding boxes from 24 pens in 5 days, of which the
recording dates are separated from each other for at
least one month. The frame ratio between pigs
with/without sprayed color marks is about 10/11.
Four videos with the same length and the same
number of pigs are used for testing as depicted in
Table 3. For evaluating the generalizability of our
models, videos in various conditions are selected
according to the activity levels of pig movements,
occlusion or occurrence of group stacking.
3.1.2 Implementation Details
The backbone network of JDE is DarkNet-53 (Redmon,
et al., 2018). Twelve clusters of anchor boxes are
derived from all training bounding boxes by a k-means
clustering method. Three key parameters are
determined - learning rate, batch size and epoch by
smartly choosing the training parameters based on
controlled experiments, to yield the best convergence
and the highest accuracy. The training model is based
on a learning rate of 0.001, optimizing under standard
SGD. The training is performed for 30 epochs with a
batch size of unity. The input video frames are resized
to 1,088× 608 pixels.
The backbone network of FairMOT is DLA-34
(Zhang, et al., 2020). The initialized weights are pre-
trained on the pedestrian dataset (Zhang, et al., 2020)
by the DLA-34 network. The training model starts
with a learning rate of 0.0001, optimized with the
Adam optimizer. The training is performed for 50
epochs with a batch size of 2. The input video frames
are also resized to 1,088 × 608 pixels.
All the experiments are carried out on a GeForce
GTX 1080 GPU and an Xeon E5-1650 v4 CPU.
3.1.3 Results on Improving re-ID
We assess the models on all testing data with JDE and
FairMOT methods. Table 4 shows a comparison
between the original association method and the
proposed weighted association strategy, where the
results of IDF1, MOTA and ID switches are shown.
The value of MOTA decreases by 0.2 percent by the
weighted association. However, the weighted
strategy outperforms the original association, as
Video-based Detection and Tracking with Improved Re-Identification Association for Pigs and Laying Hens in Farms
75
shown by the other two metrics. The overall results of
FairMOT are better than JDE, especially with respect
to identity switches.
Table 4 demonstrates that the weighted
association is effective. Hence, the following
evaluations are all on the models with the weighted
association step. Evaluation metrics on separate test
recordings are then calculated (see Table 5). Most
results show that FairMOT outperforms JDE,
especially in terms of the execution time (FairMOT
executes about 5 fps faster than JDE). The average
values of IDF1 and MOTA are increased relatively by
7.4% and 0.7%. Another essential term in MOT refers
to the identity switches, where the obtained result of
FairMOT is lower than half of that achieved by JDE.
3.2 Laying Hen Experiments
3.2.1 Dataset Description
The laying hen dataset includes the training dataset
(see Table 6 for details) and the testing dataset (see
Table 7 for details). Laying hen videos are recorded
at a frame rate of 15 or 20 fps. A frame step of 15 or
20 frames (1 second) is chosen to output one
annotated frame. All images are selected from
daytime with uncontrolled environmental conditions.
The training dataset as shown in Table 6 consists of
2,563 frames including 21,708 annotated bounding
boxes from 8 pens in 4 days. The frame ratio between
white/brown laying hens is around 7/10. Two videos
with the same length and the same number of laying
hens are used for testing, as shown in Table 7. For
evaluating the generalizability of the proposed
models, videos in different conditions are selected
according to feather color, activity levels of laying
hen movements and occlusion occurrences.
3.2.2 Implementation Details
The experimental settings of laying hen training on
JDE are similar to the training pig data, except for the
learning rate, which is set to 0.0001.
The training procedure for the laying hen dataset
on FairMOT is also similar to training pig data, but
performed for 100 epochs.
3.2.3 Results on Improving re-ID
The proposed models are evaluated on the testing data.
Table 8 provides a comparison between the original
association method and the proposed weighted
association strategy, where the results illustrate the
values of IDF1, MOTA and ID switches. The results
demonstrate that the weighted strategy is feasible to
improve the tracking results for both models.
The performances of two tracking methods are
improved by applying the weighted association, as
shown in Table 8. Hence, the following evaluations
are based on the models with the weighted association
Table 6: Summary of training data property for the laying hens.
Rec. date Color No. of pens No. of identities No. of frames No. of bounding boxes
20210308 brown 1 10 288
21,708
20210318 white, brown 2 88 1,085
20210321 white, brown 2 19 196
20210720 brown 3 35 994
Overall white:brown= 7 : 10 8 152 2,563
Table 7: Summary of testing data property for laying hens.
Rec. No. Rec. date Color
No. of
identities
Duration
(min : s)
No. of
frames
Bounding
b
oxes
Conditions
R1_hen 20210318 white 9 2:30 151 1,359
Mostly active movements;
hens fl
y
several times.
R2_hen 20210720 brown 9 2:30 151 1,359
Partial active movements;
One hen is com
p
letel
y
occlude
d
.
Table 8: Comparison between original association method and the proposed weighted strategy on the laying hen dataset.
Testing Method Association IDF1↑ MOTA↑ IDs↓
All testing
data
JDE
Ori
g
inal 83.7 84.7 5
Weighted 83.1 85.1 5
FairMOT
Original 87.1 86.5 4
Weighte
d
88.8 86.8 2
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
76
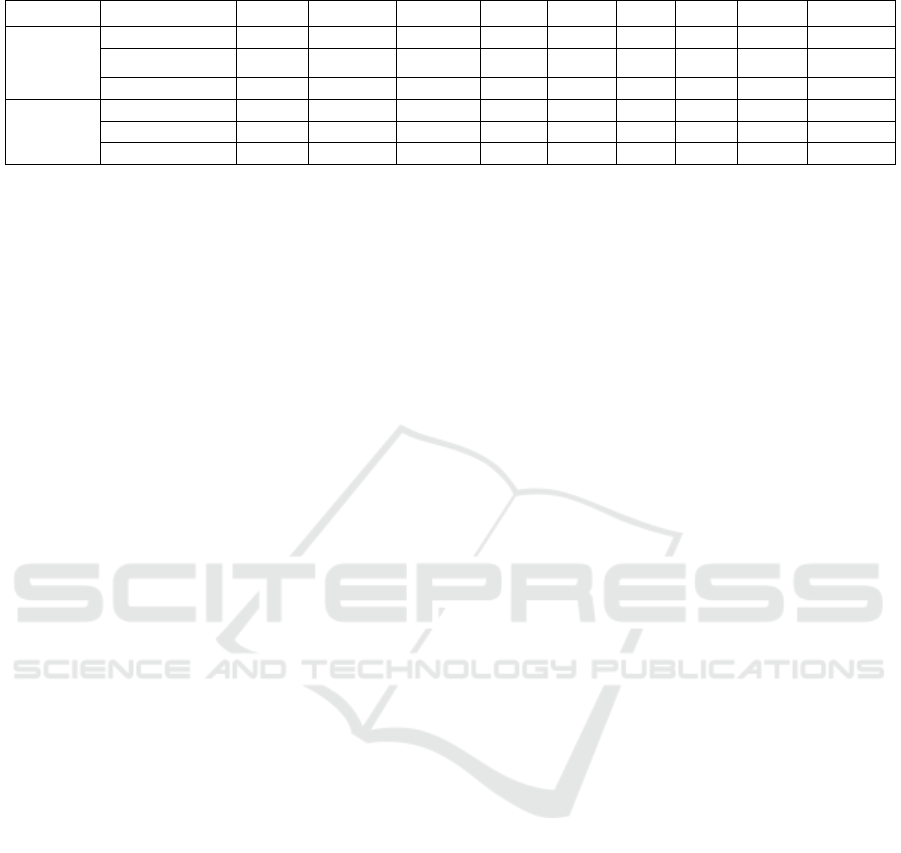
Table 9: Comparison of tracking results from JDE and FairMOT on laying hen testing set.
Method Test recording IDF1↑ MOTA↑ MOTP↑ GT MT↑ PT ML↓ IDs↓ FPS↑
JDE
R1
_
hen 84.0 85.5 77.6 9 9 0 0 2 18.16
R2_hen 82.2 84.8 83.7 9 8 0 1 3 18.16
Overall 83.1 85.1 80.6 18 17 0 1 5 18.16
FairMOT
R1
_
hen 85.1 87.2 78.5 9900 2 21.01
R2
_
hen 92.8 86.4 77.5 9 8 0 1 0 21.01
Overall 88.8 86.8 72.8 18 17 0 1 2 21.01
algorithm. The evaluation metrics on separate test
recordings are obtained (see Table 9), where for most
metrics, FairMOT outperforms JDE, especially in
terms of the execution time (FairMOT is about 3 fps
faster than JDE). The average values of IDF1 and
MOTA are relatively increased by 5.7% and 1.7%.
Again, the number of identity switches from
FairMOT is less than half of that with JDE. Especially,
FairMOT achieves zero identity switches for the
second recording. It can be observed that the
execution time of FairMOT is lower than for JDE,
which is beneficial for real-time multi-object tracking.
If more data is added, we still expect similar results,
but with more reliability in the comparison.
4 DISCUSSION AND
CONCLUSION
In this paper, we investigate two state-of-the-art
automated multi-object tracking methods on animal
datasets. Manual annotation of two types of animals
are collected: 3,706 frames of pigs with / without
sprayed body marks, and 2,865 frames of white /
brown laying hens. The models are evaluated on 4 pig
videos, each lasting 3 minutes and 20 seconds, and 2
laying hen videos, each lasting 2 minutes and 30
seconds. Each recording has different challenging
conditions such as occlusion, active and high-speed
movements. In this way, the generalization and
robustness of the tracking models are evaluated. The
execution time on JDE is 15~18 fps, while FairMOT
can achieve more than 20 fps. We have proposed a
weighted association strategy to improve the
association algorithm of animal re-ID, which
increases the performance of IDF1 by 1.7% at most,
MOTA by 0.4% at most and reduces the identity
switches by 18 at most.
Overall, the evaluation metrics of JDE on the pig
dataset result in an IDF1 of 82.9%, MOTA of 89.9%,
MOTP of 80.5%, number of identity switches of 36
and a rate of 15.86 fps. FairMOT deployed on the pig
dataset results in an IDF1 of 90.3%, MOTA of 90.8%,
MOTP of 83.7%, number of identity switches of 14
and an execution speed of 20.48 fps.
For the laying hen dataset, JDE leads to an IDF1
of 83.1%, MOTA of 85.1%, MOTP of 80.6%,
number of identity switches of 5 and a execution
speed of 18.16 fps. FairMOT yields an IDF1 of 88.8%,
MOTA of 86.8%, MOTP of 72.8%, number of
identity switches of 2 and an execution speed of 21.01
fps.
Considering the manual annotation effort, the
procedure for collecting appropriate annotation is
rather slow. However, better performance is expected
when training on more available data is possible.
Considering the difference in moving speed of
animals, we have adopted an annotation step of 2
seconds for pigs and 1 second for laying hens to
improve annotation efficiency. Continuous
annotation is expected to yield a more precise
tracking system. Additionally, our ultimate goal is to
achieve good real-time animal tracking, so longer
video recordings in different conditions are required
to be annotated for both model development and more
thorough evaluation. After achieving sufficient
tracking performance, we will also optimize and
trade-off the execution time of the system.
The adopted backbone network in JDE is
DarkNet-53 for object detection, which is based on
the third version of YOLO. In recent years, YOLO
has already been developed and implemented into
Version 5. Future work will involve to incorporate the
latest YOLOv5 into the JDE model in order to verify
its efficiency. Similar work should also be performed
for the FairMOT architecture.
ACKNOWLEDGEMENTS
This publication is part of the project IMAGEN [P18-
19 project 1] of the research programme Perspectief,
which is financed by the Dutch Research Council
(NWO).
Video-based Detection and Tracking with Improved Re-Identification Association for Pigs and Laying Hens in Farms
77

REFERENCES
Bernardin, K., & Stiefelhagen , R. (2008). Evaluating
Multiple Object Tracking Performance: The CLEAR
MOT Metrics. EURASIP Journal on Image and Video
Processing, 2008, 1-10.
Chung, M. K., Lee L. Eckhardt, & Lin Y. Chen. (2020).
Lifestyle and Risk Factor Modification for Reduction of
Atrial Fibrillation: A Scientific Statement From the
American Heart Association. Circulation. doi:10.1161/
CIR.0000000000000748
Costa, Madalena, Goldberger, Ary L, Peng, & C.-K. (2002,
7). Multiscale Entropy Analysis of Complex Physiologic
Time Series. Phys. Rev. Lett., 89(6), 068102. Retrieved
from https://link.aps.org/doi/ 10.1103/PhysRevLett.89.0
68102
Dendorfer, P., Osep, A., & Leal-Taixé, L. (n.d.). CVPR 2019
Tracking Challenge Results. Retrieved from
https://motchallenge.net/
FG, C., Aliot E, & Botto GL. (2008). Delayed rhythm control
of atrial fibrillation may be a cause of failure to prevent
recurrences: reasons for change to active antiarrhythmic
treatment at the time of the first detected episode.
Europace. doi:10.1093/europace/eum276
Girshick, R. (2015). Fast R-CNN. ICCV 2015.
Goldberger, A., Amaral, L., Glass, L., & Hausdorff, J. (2017,
2 1). AF Classification from a Short Single Lead ECG
Recording - The PhysioNet Computing in Cardiology
Challenge 2017. (PhysioBank, PhysioToolkit, and
PhysioNet) Retrieved from https://physionet.org/
content/challenge-2017/1.0.0/
Griffin, D. W., & Jae S. Lim. (1984). Signal Estimation from
Modified Short-Time Fourier Transform. IEEE
Transactions on Acoustics, Speech, and Signal
Processing, 236-243.
Heindl, C. (2017). Benchmark multiple object trackers
(MOT) in Python. Retrieved from https://github.com/
cheind/py-motmetrics
Intel. (2018). Powerful and efficient Computer Vision
Annotation Tool (CVAT).
Kahn, L. H. (2017). Perspective: The one-health way.
Nature, 543, S47.
Kapun, A., Felix, A., & Eva, G. (2018). Activity analysis to
detect lameness in pigs with a UHF-RFID system. 10th
International Livestock Environment Symposium.
Kendall, A., Gal, Y., & Cipolla, R. (2018). Multi-Task
Learning Using Uncertainty to Weigh Losses for Scene
Geometry and Semantics. CVPR.
Kim, J., Chung, Y., Choi, Y., Sa, J., Kim, H., Chung, Y., . . .
Kim, H. (2017). Depth-Based Detection of Standing-Pigs
in Moving Noise Environments. Sensors, 17(12), 2757.
Kuhn, H. W. (1955). The hungarian method for the
assignment problem. In Naval Research Logistics
Quarterly (pp. 83-97).
Lee, G. R., Ralf Gommers, Filip Wasilewski, Kai Wohlfahrt,
& Aaron O’Leary. (2019). PyWavelets: A Python
package for wavelet analysis. Journal of Open Source
Software, 4(36), 1237. doi:https://doi.org/ 10.21105/
joss.01237
Lin, T.-Y., Dollár, P., Girshick, R., He, K., Hariharan, B., &
Belongie, S. (2017). Feature Pyramid Networks for
Object Detection. CVPR 2017.
Lip, G., L. Fauchier, & S.B. Freedman. (2016). Atrial
fibrillation. Nat Rev Dis Primers 2. doi:https:
//doi.org/10.1038/nrdp.2016.16
Mallick, T., Das, P. P., & Majumdar, A. K. (2014).
Characterizations of Noise in Kinect Depth Images: A
Review. IEEE Sensors Journal, 14
(6), 1731-1740.
Maselyne, J. (2016). Measuring the drinking behaviour of
individual pigs housed in group using radio frequency
identification (RFID). Animal, 1557-1556.
Matthews, S. G., Miller, A., James, C., Llias, K., & Thomas,
P. (2016). Early detection of health and welfare
compromises through automated detection of
behavioural changes in pigs. The Veterinary Journal,
217, 43-51.
Matthews, S., A.L., M., & Thomas, P. (2017). Automated
tracking to measure behavioural changes in pigs for
health and welfare monitoring. Scientific Reports, 7.
Munger, T. M., Li-Qun Wu, & Win K. Shen. (2014). Atrial
fibrillation. Journal of Biomedical Research.
doi:10.7555/jbr.28.20130191
Neubeck, A., & Gool, L. V. (2006). Efficient non-maximum
suppression. IEEE.
Page, R. L., W E Wilkinson, W K Clair, E A McCarthy, & E
L Pritchett. (1994). Asymptomatic arrhythmias in
patients with symptomatic paroxysmal atrial fibrillation
and paroxysmal supraventricular tachycardia.
Circulation.
doi:https://doi.org/10.1161/01.CIR.89.1.224
Redmon, J., & Farhadi, A. (2018). Yolov3: An incremental
improvement.
Ren, S., He, K., Girshick, R., & Sun, J. (2015). Faster R-
CNN: Towards Real-Time Object Detection with Region
Proposal Networks. In Advances in Neural Information
Processing Systems (pp. 91-99).
Ristani, E., Solera, F., Zou, R., Cucchiara, R., & Tomasi, C.
(2016). Performance Measures and a Data Set for Multi-
Target, Multi-Camera Tracking. ECCV 2016.
Schroff, F., Kalenichenko, D., & Philbin, J. (2015). FaceNet:
A Unified Embedding for Face Recognition and
Clustering. CVPR.
Sejdić, E., Igor Djurović, & Jin Jiang. (2009). Time-
frequency feature representation using energy
concentration: An overview of recent advances. Digital
Signal Processing, 19 (1): 153–183.
doi:https://doi.org/10.1016/j.dsp.2007.12.004
Sohn, K. (2016). Improved Deep Metric Learning with
Multi-class N-pair Loss Objective. NIPS.
T.Inouye. (1991). Quantification of EEG irregularity by use
of the entropy of the power spectrum. Electroencepha-
lography and clinical neurophysiology, 79(3), 204-210.
Wang, Z., Zheng, L., Liu, Y., Li, Y., & Wang, S. (2020).
Towards Real-Time Multi-Object Tracking. 2020
European Conference on Computer Vision.
Welch, G., & Bishop, G. (1995). An introduction to the
kalman filter.
Zhang, Y., Wang, C., Xinggang, W., Wenjun, Z., & Wenyu,
L. (2020). FairMOT: On the Fairness of Detection and
Re-Identification in Multiple Object Tracking. 2020
Conference on Computer Vision and Pattern
Recognition.
Zhou, X., Wang, D., & Krähenbühl, P. (2019). Objects as
Points. arXiv.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
78
