
Deep Video Frame Rate Up-conversion Network using Feature-based
Progressive Residue Refinement
∗
Jinglei Shi, Xiaoran Jiang and Christine Guillemot
INRIA Rennes - Bretagne Atlantique, Campus Universitaire de Beaulieu, 35042 Rennes, France
Keywords:
Video Frame Rate Up-conversion, Frame Interpolation, Progressive Residue Refinement, Optical Flow
Estimation.
Abstract:
In this paper, we propose a deep learning-based network for video frame rate up-conversion (or video frame
interpolation). The proposed optical flow-based pipeline employs deep features extracted to learn residue
maps for progressively refining the synthesized intermediate frame. We also propose a procedure for fine-
tuning the optical flow estimation module using frame interpolation datasets, which does not require ground
truth optical flows. This procedure is effective to obtain interpolation task-oriented optical flows and can be
applied to other methods utilizing a deep optical flow estimation module. Experimental results demonstrate
that our proposed network performs favorably against state-of-the-art methods both in terms of qualitative and
quantitative measures.
1 INTRODUCTION
Video frame rate plays a critical role in video quality
perception, hence in the user quality of experience in
multimedia applications. Generating high frame rate
videos from low frame rate versions has long been a
challenging problem that has attracted a lot of atten-
tion in the computer vision community. This explains
why, in recent years, a significant effort has been ded-
icated to the problem of video temporal interpolation
for frame rate conversion. Existing video frame in-
terpolation (VFI) approaches consist of synthesizing
intermediate frames from given input frames and can
be roughly classified into three categories, i.e. op-
tical flow (Liu et al., 2017; Jiang et al., 2018; Bao
et al., 2019a; Niklaus and Liu, 2018; Niklaus and
Liu, 2020) or feature flow-based schemes (Gui et al.,
2020), kernel-based schemes (Niklaus et al., 2017a;
Niklaus et al., 2017b; Bao et al., 2019b) and phase-
based ones (Meyer et al., 2015; Meyer et al., 2018).
Flow-based methods estimate optical flows be-
tween given frames, then interpolate or extrapolate
target frames along the motion vectors. Liu et al. (Liu
et al., 2017) proposed a Deep Voxel Flow (DVF) net-
work that consists of a flow estimation module and
a trilinear interpolation layer. The network estimates
∗
This work was supported by the EU H2020 Re-
search and Innovation Programme under grant agreement
No 694122 (ERC advanced grant CLIM).
a kind of optical flow and a temporal mask for tri-
linear blending the input frames. Jiang et al. (Jiang
et al., 2018) propose a double U-Net pipeline where
the first U-Net predicts bi-directional optical flows to
be further combined to approximate the intermediate
optical flows. The second U-Net refines the interme-
diate optical flows as well as predicts soft visibility
maps in order to warp and linearly merge the input
frames. Bao et al. (Bao et al., 2019a) exploit depth
information in the flow projection procedure for bet-
ter handling occlusions. The proposed model warps
the input frames, depth maps, and contextual features
based on the optical flows, and local interpolation ker-
nels are also used for synthesizing the output frames.
In (Niklaus and Liu, 2018; Niklaus and Liu, 2020),
the authors employ the state-of-the-art PWC-Net (Sun
et al., 2018) for optical flow estimation. Both in-
put frames and extracted deep features are projected
and merged to obtain intermediate frames. Instead
of using classical optical flow estimation techniques,
the authors in (Gui et al., 2020) propose a two-stage
frame interpolation pipeline where feature flows es-
timated by a multi-flow multi-attention generator are
used to warp feature maps. For methods (Bao et al.,
2019a; Niklaus and Liu, 2018; Niklaus and Liu, 2020)
that make use of an off-the-shelf optical flow estima-
tion module, they both rely on a good initialization of
that module whether or not end-to-end finetuning is
conducted later. However, most optical flow estima-
Shi, J., Jiang, X. and Guillemot, C.
Deep Video Frame Rate Up-conversion Network using Feature-based Progressive Residue Refinement.
DOI: 10.5220/0010793900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
331-339
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
331

tion networks are trained on synthetic datasets with
ground truth optical flows, and are not fully adapted
to the frame interpolation problem. In this paper, we
propose a simple but effective finetuning procedure
that allows us to finetune the initial optical flow esti-
mation module with no need for ground truth optical
flows.
Unlike flow-based methods, kernel-based meth-
ods (Niklaus et al., 2017a; Niklaus et al., 2017b)
estimate a series of spatially-adaptive interpolation
kernels, and views are then synthesized by convolv-
ing input frames with these learned kernels. In (Bao
et al., 2019b), the authors integrate both optical flow
and spatial compensation filters in an adaptive layer
for synthesizing target frames. Kernel-based meth-
ods are computationally expensive and do not incor-
porate explicit mechanisms for occlusion handling.
The authors in (Choi et al., 2020) employ a special
feature map shuffling operation with a channel atten-
tion mechanism to replace the optical flow computa-
tion. Frames are synthesized from the re-distributed
and modulated features without estimating motion
information. Phase-based methods (Meyer et al.,
2015; Meyer et al., 2018) are another type of mo-
tion estimation-free solutions. The motion is repre-
sented as a per pixel phase shift, hence the interme-
diate frame is a result of operating phase modifica-
tion for each pixel. Although the authors in (Meyer
et al., 2018) made progress in tackling larger motion
and higher frequency content compared with (Meyer
et al., 2015), they still can not reach the same level of
quality as flow-based methods.
In our work, we follow the flow-based paradigm
as it has yielded satisfactory results on various
datasets (Soomro et al., 2012; Xue et al., 2019). Fur-
thermore, it benefits from recent advances in optical
flow estimation (Ilg et al., 2017; Hui et al., 2018; Sun
et al., 2018). We use PWC-Net for optical flow es-
timation, that we specifically finetune for the tempo-
ral interpolation task, using the video frame interpo-
lation dataset ‘Vimeo90K’ (Xue et al., 2019). Besides
original frames, deep features extracted from these
frames are also warped and used to improve the syn-
thesis process. The authors in (Niklaus and Liu, 2018;
Niklaus and Liu, 2020) also combined shallow or
deep features with input frames to obtain interpolated
frames, however using a complicated GridNet archi-
tecture (Fourure et al., 2017). In our scheme, feature
maps at different levels are fed into ‘ConvBlocks’ to
learn residue maps for a progressive refinement of the
interpolated details. We have conducted comprehen-
sive experiments on various datasets and compared
with other state-of-the-art methods (Bao et al., 2019b;
Gui et al., 2020; Niklaus and Liu, 2020) to show that
our design works well in the video frame rate up-
conversion task.
2 METHODOLOGY
2.1 Network Overview
The video frame interpolation task aims to retrieve
an intermediate frame I
t
from two input frames I
0
and I
1
, where t ∈ (0, 1) is an in-between instant.
The overall architecture of our pipeline is shown in
Fig. 1, where the input frames I
0
and I
1
are first fed
to the flow estimator to get bidirectional optical flows
flow
0→1
and f low
1→0
, and to the encoder to obtain
the feature maps f
i
0
, f
i
1
(i = 1, 2, 3). Based on the es-
timated optical flows, both the input frames and their
features at different resolution levels are forward pro-
jected to the target instant t. The warped images
˜
I
0
˜
I
1
are first fed into ConvBlock1 to compute a base
feature volume. Similarly, the warped feature maps at
different resolution levels are fed into the ConvBlocks
2 to 4 to obtain residue feature volumes that are used
to refine the base feature volume, by adding details.
Both base and refined feature volumes, at the differ-
ent resolution levels, are decoded by a shared decoder
to generate the synthesized views
ˆ
I
i
t
at the target in-
stant t with increasing image quality. The network
architecture is detailed in Table 1.
2.2 Finetuned Optical Flow Estimation
As aforementioned, flow-based methods using an off-
the-shelf flow estimation module always rely on a
good initialization whether or not end-to-end finetun-
ing is conducted. Available optical flow estimation
networks are mostly trained on synthetic datasets with
ground truth optical flows (Butler et al., 2012; Doso-
vitskiy et al., 2015; Ilg et al., 2018). These pre-trained
networks are less adapted to real-world scene, and es-
pecially for the interpolation task. Facing this prob-
lem, we finetune the optical flow estimation network
in a frame interpolation context, with the help of dif-
ferentiable warping operations, in order to optimize
network weights for the interpolation task. Taking
PWC-Net as an example, initial bidirectional optical
flows flow
0→1
, f low
1→0
between I
0
and I
1
are esti-
mated as:
flow
0→1
, f low
1→0
= PWC
θ
(I
0
, I
1
), (1)
where PWC represents this motion estimation step
and θ denotes the parameters in PWC-Net. The goal
of finetuning is to optimize θ in order to minimize the
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
332
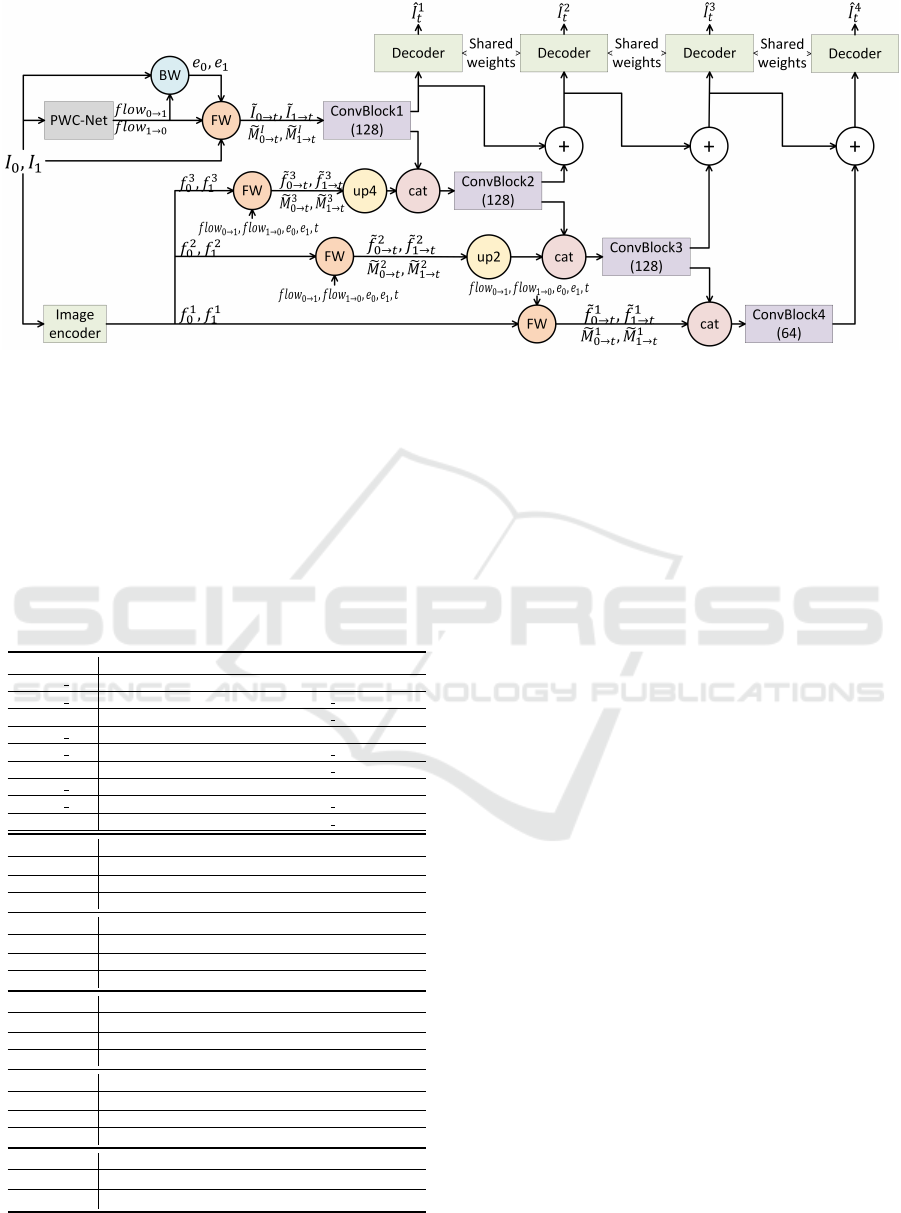
Figure 1: Overall architecture of our proposed method. Given two consecutive frames I
0
and I
1
, the flow estimator ‘PWC-
Net’ and the feature extractor ‘Image encoder’ respectively predict bidirectional optical flows flow
0→1
, flow
1→0
and extract
three-scale feature maps {f
1
0
, f
1
1
, f
2
0
, f
2
1
, f
3
0
, f
3
1
}. Backward Warping (BW) is firstly applied by taking source frames and
predicted flows to output warping errors e
0
and e
1
which are used as confidence measures. Then the Forward Warping (FW)
projects the input frames and their features to the desired time instant t, where the error maps e
0
and e
1
are used to handle
pixel overlaps. The feature maps in different scales bringing different levels of details are fed into ConvBlocks which generate
residues that are used to progressively refine the feature volumes from the previous level (except for the lowest level). Finally,
a shared decoded reconstruct a set of intermediate frames with increasing levels of details. Please refer to Table 1 for the
detailed network architecture.
Table 1: Proposed network architecture. k, s and in/out
represent the kernel size, the stride and the number of in-
put/output channels, whereas ‘↑’ and ‘{}’ represent bilinear
upsampling and concatenation.
Encoder k s in/out input
conv1 1 3 1 3/128 I
0
or I
1
conv1 2 3 1 128/128 conv1 1
f
1
0
or f
1
1
3 1 128/128 conv1 2
conv2 1 3 2 128/128 f
1
0
or f
1
1
conv2 2 3 1 128/128 conv2 1
f
2
0
or f
2
1
3 1 128/128 conv2 2
conv3 1 3 2 128/128 f
2
0
or f
2
1
conv3 2 3 1 128/128 conv3 1
f
3
0
or f
3
1
3 1 128/128 conv3 2
ConvBlock1
convA1 3 1 8/128 {
˜
I
0→t
,
˜
I
1→t
,
˜
M
I
0→t
,
˜
M
I
1→t
}
convA2 3 1 128/128 convA1
D
1
,R
1
3 1 128/128 convA2
ConvBlock2
convB1 3 1 322/128 {↑(
˜
f
3
0→t
,
˜
f
3
1→t
,
˜
M
3
0→t
,
˜
M
3
1→t
),R
1
}
convB2 3 1 128/128 convB1
D
2
,R
2
3 1 128/128 convB2
ConvBlock3
convC1 3 1 322/128 {↑(
˜
f
2
0→t
,
˜
f
2
1→t
,
˜
M
2
0→t
,
˜
M
2
1→t
),R
2
}
convC2 3 1 128/128 convC1
D
3
,R
3
3 1 128/128 convC2
ConvBlock4
convD1 3 1 322/64 {↑(
˜
f
1
0→t
,
˜
f
1
1→t
,
˜
M
1
0→t
,
˜
M
1
1→t
),R
3
}
convD2 3 1 64/64 convD1
D
4
3 1 64/64 convD2
Decoder
convE1 3 1 64/64
P
i
n=1
D
n
ˆ
I
i
t
3 1 64/3 convE1
warping error:
argmin
θ
|I
t
−
˜
I
0→t
|
1
+ |I
t
−
˜
I
1→t
|
1
, (2)
where
˜
I
0→t
and
˜
I
1→t
are respectively warped images
from given instants 0 and 1 to instant t.
There are actually two ways to obtain warped im-
ages
˜
I
0→t
and
˜
I
1→t
based on flow
0→1
and f low
1→0
.
One is to apply an ‘Image spatial transformation’ (or
Backward Warping (BW)) as used in (Jaderberg et al.,
2015). However, this requires interpolating f low
t→0
and f low
t→1
, as in (Jiang et al., 2018), before warp-
ing the images. However, interpolating intermediate
optical flows always brings errors, especially at the
object boundaries. One can instead apply Forward
Warping (FW) in a similar way as in (Niklaus and Liu,
2020) or (Shi et al., 2020), which can directly warp
images to the time instant t without prior estimation
of f low
t→0
and f low
t→1
. However, the method in
(Shi et al., 2020) requires a prior flow (depth maps
in the case of the approach in (Shi et al., 2020)) es-
timation for handling overlaid pixels after warping.
Overlaid pixels from foreground are given more im-
portance than those from background when interpo-
lating the final pixel color values.
In order to compute a measure of confidence for
the warped pixels, without having to interpolate the
optical flows computed between the input frames, we
can, as in (Niklaus and Liu, 2020) instead calculate
Deep Video Frame Rate Up-conversion Network using Feature-based Progressive Residue Refinement
333

brightness errors e
0
and e
1
to tackle pixel overlaps, as
e
0
=
X
RGB
|I
0
− BW (I
1
, f low
0→1
)|, (3)
e
1
=
X
RGB
|I
1
− BW (I
0
, f low
1→0
)|. (4)
(a) Warped image be-
fore FT
(b) Warped image after
FT
Figure 2: Visualization of
˜
I
0→t
(a) before/ (b) after finetun-
ing (FT) flow estimator.
Warping errors e
0
and e
1
are actually effective
cues for handling overlaps, since pixels coming from
occluded regions have larger error values than those
from visible regions, and these occluded pixels are
also more likely to be overlaid after warping. So, al-
though we use FW instead of BW to warp the input
frames to the intermediate time instant t, we use BW
for calculating e
0
and e
1
in Eq. 3 and Eq. 4.
With e
0
and e
1
, the authors in (Niklaus and Liu,
2020) further employ a U-Net which takes these error
maps and source frames as inputs to predict impor-
tance maps for the following FW operation. How-
ever, using such a network only for predicting the
pixel confidence measures implies additional param-
eters, and makes the fine-tuning together with PWC-
Net and U-Net more complicated with risks of net-
work collapse.
To avoid the above problems, we instead directly
use the normalized error maps e
0
0
and e
0
1
as impor-
tance maps in the FW step to handle pixel overlaps.
We adopt a scale factor α and exponential function to
compute the pixel confidence measure as exp(−α ∗
e
0
). When increasing the value of α, overlaid pixels
having smaller error values will be given more impor-
tance, hence will contribute more to the interpolation.
A larger value of α is favorable to videos that contain
large occlusions due to motion. In our experiments,
we use a testset that includes different types of mo-
tion, and we experimentally found that α = 1 can
generate satisfactory results.
Besides the normalization of warping errors, we
also explicitly detect disocclusion regions: after
warping, the pixel positions that do not have any pixel
falling in its neighbourhood, are identified as disoc-
cluded positions. These positions are set to 0 in the
corresponding binary mask
˜
M, and all the others are
set to 1. Based on the error maps normalization and
on the detection of disocclusions, our FW can be sum-
marized as follows:
˜
I
0→t
,
˜
M
0→t
= F W (I
0
, f low
0→t
, α ∗ e
0
0
), (5)
˜
I
1→t
,
˜
M
1→t
= F W (I
1
, f low
1→t
, α ∗ e
0
1
), (6)
where flow
0→t
= t ∗ f low
0→1
and flow
1→t
= (1 −
t) ∗ flow
1→0
.
The disocclusion masks
˜
M
0→t
and
˜
M
1→t
are cru-
cial to our method, since they allow us to exclude un-
reliable pixels, which are not inpainted during warp-
ing, from the objective function Eq. 2. The new func-
tion used for finetuning the flow estimator, after tak-
ing the binary masks into account, becomes
argmin
θ
|(I
t
−
˜
I
0→t
)∗
˜
M
0→t
|
1
+|(I
t
−
˜
I
1→t
)∗
˜
M
1→t
|
1
.
(7)
The disoccluded pixels are inpainted in the Con-
vBlocks, and the masks are indicating the disocclu-
sion positions. Based on Eq. 7, PWC-Net can be op-
timized specifically for the view synthesis task. The
effectiveness of our finetuning procedure is illustrated
in Fig. 2, where before finetuning, we can observe se-
vere deformations of the license plate, and blurriness
due to optical flow inaccuracy. After finetuning, the
deformation and blurriness issue is considerably alle-
viated. This is further analyzed in the ablation study
section.
Apart from the improvement of the final recon-
struction quality, the finetuning of PWC-Net before
end-to-end training can effectively shorten global
training time and prevent network collapse. An-
other reason for recommending this finetuning pro-
cess is that when the network is not end-to-end train-
able, such as in (Niklaus and Liu, 2018), having a
synthesis-task optimized flow estimator definitely im-
proves the final performance.
2.3 Progressive Residual Refinement
The next step is to retrieve the intermediate
frame
ˆ
I
t
based on these bi-directional flows
flow
0→1
, f low
1→0
optimized for interpolation.
According to Eqs. 5 and 6, the original frames
I
0
, I
1
and extracted features f
i
0
, f
i
1
are first warped to
instant t to obtain
˜
I
0→t
,
˜
I
1→t
,
˜
f
i
0→t
,
˜
f
i
1→t
and their
corresponding binary masks
˜
M
i
0→t
,
˜
M
i
1→t
. Con-
vBlock1 first takes warped images and their masks
and outputs a feature volume containing a base repre-
sentation of scene information, which we then refine
by adding residue feature volumes based on warped
features
˜
f
i
0→t
,
˜
f
i
1→t
at different levels obtained with
kernels having different receptive fields. These fea-
tures aim at capturing subtle textures in the scene, to
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
334

26.42dB/0.9014 26.64dB/0.9070
27.83dB/0.9317 28.42dB/0.9422
Figure 3: Visualization of progressively refined details from
ˆ
I
1
t
to
ˆ
I
4
t
(from top to bottom, from left to right).
then refine details of the base feature volume. The
merging of images resulting from both pixel-based
and feature-based warping has been shown power-
ful in (Shi et al., 2020) in the context of light field
view synthesis. The features extracted at three dif-
ferent scales are used, via ConvBlock2-4, to learn
residues to progressively refine the base feature map
volume. ConvBlock1-4 are three-layer convolutional
blocks. The last layer of ConvBlock1-3 is split into
two branches, one branch keeping a subset of fea-
tures that refines the previous level, while the sec-
ond subset of features (corresponding to higher fre-
quency details) is used at the next refinement level
(see Fig 1(c)). Finally, a shared decoder is employed
to decode both the base volume and volumes progres-
sively refined at different levels to obtain synthesized
views
ˆ
I
i
t
(i = 1, 2, 3, 4). Fig. 3 shows this progres-
sive refinement from
ˆ
I
1
t
to
ˆ
I
4
t
. From
ˆ
I
1
t
to
ˆ
I
4
t
, more
and more details are added and artefacts are gradually
corrected. We use
ˆ
I
4
t
as our final interpolated frame
as it contains the most details. The whole pipeline
is trained by minimizing the following reconstruction
error:
L
rec
=
4
X
i=1
λ
i
Lap(I
t
−
ˆ
I
i
t
), (8)
where Lap is the Laplacian loss (Bojanowski et al.,
2017) with three levels, and λ
i
are hyperparameters
for controlling the reconstruction quality at each level.
More precisely, we set λ
i
to non-zero values at the
beginning of the training, to enforce a target frame
reconstruction at each network level. Once each net-
work level is well initialized, we set λ
4
to non-zero
and the other λ values to zero in order to only focus
on the last reconstruction step.
3 TRAINING DETAILS
We use tensorflow to implement our method and
Adam to optimize the model with β
1
= 0.9 and
β
2
= 0.999. The overall training schedule of our
method is divided in two steps: first finetuning PWC-
Net and then training the whole network.
The finetuning of PWC-Net aims at optimizing its
weights for the synthesis task. In this step, we set
the batch size to 20, the patch size to 160×160 and
the learning rate to 10
−4
to finetune PWC-Net for 20
epochs. We found that 20 epochs of finetuning can
already correct most of deformations and blurriness.
More epochs will prolong the overall schedule while
bringing limited improvement. We found that this
finetuning procedure is helpful to the global schedule,
since the following training procedure will be much
longer, and may suffer from performance oscillation
or even collapse without a finetuned flow estimator.
The training of the whole network is made in two
steps. We first fix the weights in PWC-Net and update
the other variables, with a batch size of 20, a patch
size of 160×160, a learning rate of 10
−4
and λ
1
...λ
4
=
{0.1, 0.2, 0.4, 0.8} for 50 epochs. This step guides
the ConvBlock1-4 layers to learn residues for correct-
ing details in a coarse to fine manner. In the sec-
ond step, we end-to-end train the network and update
all variables, with a batch size of 16, a patch size of
160×160, a learning rate of 10
−5
and λ
4
= 1 for 40
epochs. λ
1
, λ
2
, λ
3
are set to 0 to make the optimiza-
tion focus on the final synthesized view. The training
of our pipeline has been conducted on a Nvidia Tesla
V100 GPU card with 32GB GRAM, and took about 6
days to converge.
4 EXPERIMENTAL RESULTS
We have carried out experiments on several datasets
and measured the PSNR and SSIM of the interpolated
frames in comparison with state-of-the-art methods.
4.1 Datasets
We used the following datasets:
• Training Dataset. Both finetuning of PWC-Net
and training of the network have been conducted
using the Vimeo90K training set (Xue et al.,
2019), which contains 51,312 frame triplets with
resolution 256×448. We use the first and the last
frames as inputs and the intermediate frame as
ground truth.
• Test Datasets. We have used two test sets to as-
sess the quality of the synthesized frames: 1) the
Deep Video Frame Rate Up-conversion Network using Feature-based Progressive Residue Refinement
335
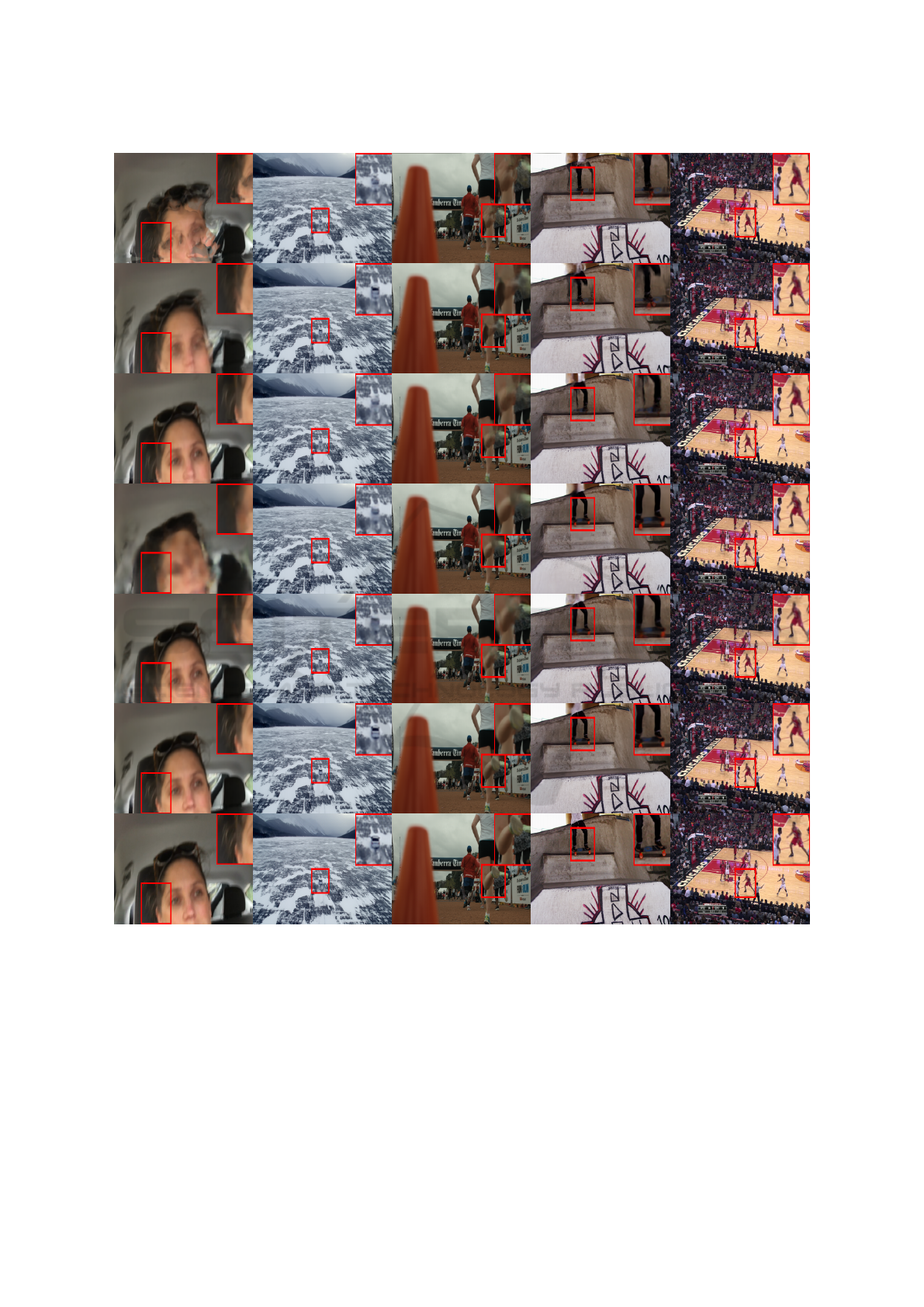
Figure 4: Visual comparison of synthesized frames for different methods. From top to bottom, they are frames interpolated
using SuperSloMo (Jiang et al., 2018), SepConv (Niklaus et al., 2017b), MEMC (Bao et al., 2019b), FeFlow (Gui et al., 2020),
SMSP (Niklaus and Liu, 2020), Our method. The last row shows ground truth frames.
Vimeo90K testset which has 3,782 frame triplets
with resolution 256×448; 2) the Adobe240fps
dataset is a dataset captured by a handheld cam-
era. We have extracted 777 frame triplets and in-
terpolated the intermediate frame during testing.
4.2 Experimental Set Up
We compare the proposed video frame interpola-
tion method with the most representative and recent
methods: SuperSloMo (Jiang et al., 2018), SepConv
(Niklaus et al., 2017b), MEMC (Bao et al., 2019b),
FeFlow (Gui et al., 2020) and SMSP (Niklaus and
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
336
Table 2: Quantitative results (PSNR&SSIM) for the interpolated frames (averaged over 3782 and 777 frames).
Methods
Vimeo90K Adobe240fps
PSNR SSIM PSNR SSIM
SuperSloMo(Jiang et al., 2018) 30.92 0.9320 28.44 0.8966
SepConv(Niklaus et al., 2017b) 33.80 0.9555 31.16 0.9225
MEMC(Bao et al., 2019b) 34.43 0.9625 31.54 0.9269
FeFlow(Gui et al., 2020) 35.09 0.9629 31.50 0.9248
SMSP(Niklaus and Liu, 2020) 35.49 0.9671 31.62 0.9269
Ours 35.86 0.9689 31.80 0.9286
Liu, 2020). Among them, SuperSloMo infers the op-
tical flow in the target instant to backward project the
input frames and employs soft visibility maps to han-
dle occlusions. SepConv formulates the frame inter-
polation problem as a local separable convolution us-
ing 1D kernels. Target frames are synthesized with-
out involving any optical flow. MEMC predicts both
optical flows and convolution kernels respectively for
global motion estimation and local motion compen-
sation in its synthesis process. FeFlow pioneers the
flows of feature maps instead of images to retrieve an
intermediate frame. SMSP builds a two-stage syn-
thesis pipeline by using an off-the-shelf PWC-Net for
flow prediction, and a GridNet (Fourure et al., 2017)
for frame synthesis, which is in the same vein as ours.
For a fair comparison, we use the official authors’
implementations for the methods SepConv (Niklaus
et al., 2017b), MEMC (Bao et al., 2019b) and FeFlow
(Gui et al., 2020). We use a third-party code and a
pre-trained model for the SuperSloMo (Jiang et al.,
2018) method. For the SMSP method (Niklaus and
Liu, 2020), the authors only provide the implementa-
tion of their FW operation. The rest of the network
implementation and the trained models are not avail-
able. Therefore, we re-implemented and trained their
network architecture by following the instructions in
the paper. Since MEMC, FeFlow and SMSP are al-
ready trained on Vimeo90K dataset and SuperSloMo
is trained on Adobe240fps datasets, we use the default
parameter settings recommended by the authors in our
experiments, e.g. we use kernel size 4 × 4 in adaptive
warping layer of MEMC, 16 groups of attention maps
in FeFlow etc.
4.3 Interpolation Results
The performances of all tested methods are shown in
Table 2. We can observe that our method outperforms
the best referenced methods by a margin of about 0.2-
0.3dB. This gain of PSNR is not trivial, as we can
notice that the difference in terms of PSNR between
the reference methods is sometimes less than 0.1dB.
Besides the quantitative evaluation in terms of
PSNR and SSIM, Fig 4 shows synthesized views us-
ing different methods. We zoomed regions contain-
ing subtle details in each image for comparison. We
can notice that our method better reconstructs details
when compared with other methods. For details like
the hair in the first scene and the car in the second
scene, where other methods suffer from a deforma-
tion or blurriness, our pipeline yields more plausible
results.
Another advantage of our method is that it can
up-convert videos to an arbitrary frame rate, since
the target instant t can be any value between 0
and 1. Methods such as SepConv and FeFlow can
only interpolate frames at t = 0.5, which means
that, to interpolate by a factor of N = 2
k
(k >
1), they must recursively perform k interpolations.
Interpolation errors will gradually augment during
this recursive synthesis process. We have 8X up-
converted video frame rate using different methods,
and the corresponding interpolated videos can be
found in our project homepage: http://clim.inria.fr/
research/VISAPP2022/index.html, where high frame
rate videos obtained using our pipeline have less arti-
facts and deformations than others.
Please note that, like most of the frame synthesis
methods, our method is based on linear-motion as-
sumption, all motions are supposed to have uniform
velocities during frame warping process. Inferring
both velocity and acceleration of motion using only
two frames is a very ill-posed problem, it is more in-
vestigated in a multi-frame (Bao et al., 2018; Reda
et al., 2019; Xu et al., 2019) context.
4.4 Ablation Study
4.4.1 Forward Warping Method
Although both our method and SMSP are built on
PWC-Net, the rest of the network has a different de-
sign. In SMSP, the authors employ a neural network
that takes brightness errors e
0
, e
1
in Eq.3 and Eq.4 to
learn maps of importance for handling pixel overlaps,
this network increases the total parameter number but
brings little improvement. While we normalize two
brightness errors as maps of importance, which is
Deep Video Frame Rate Up-conversion Network using Feature-based Progressive Residue Refinement
337
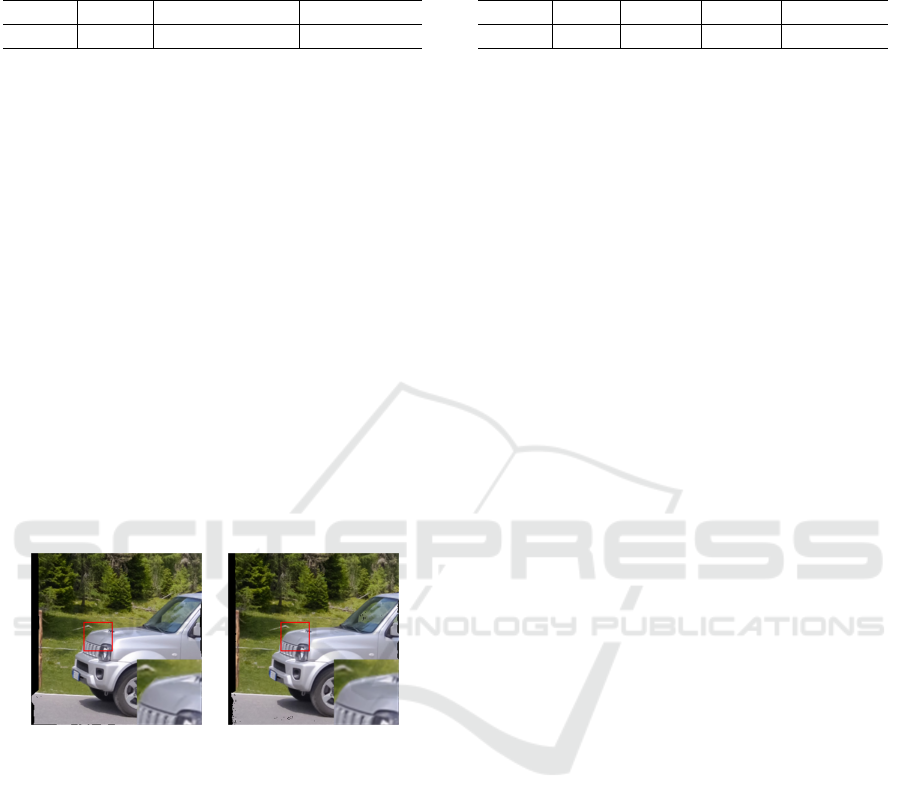
Table 3: Quantitative evaluation of different finetuning
strategies on Vimeo90K testset. The obtained PSNR val-
ues are averaged over 3782 frames.
Types wo FT FT(SMSP FW) FT(our FW)
PSNR 31.26 33.38 33.81
likewise effective in handling pixel overlaps but with-
out an increasing parameter number.
Fig. 5 shows the warped images obtained when us-
ing the FW step proposed in SMSP (Niklaus and Liu,
2020). Although the quality of the two warping meth-
ods looks similar, the proposed method is very simple,
as it does not use extra network as in (Niklaus and
Liu, 2020). We have also quantitatively evaluated the
performance when using different FW strategies. Ta-
ble 3 shows averaged PSNR over 3782 frames. More
specially, we use optical flows to warp the first and
the third frames to the intermediate instant, and com-
pare it with ground truth frame. In this process, all
disoccluded pixels are excluded. The employed op-
tical flows are estimated without finetuning or with
finetuning, using FW proposed in (Niklaus and Liu,
2020), or finetuned using our proposed FW. Our pro-
posed simple FW step makes the end-to-end fine tun-
ing of all the network components of the architecture
easier, leading to a better quality for the final interpo-
lated frames.
(a) Warped image us-
ing FW proposed in
(Niklaus and Liu, 2020)
(b) Warped image using
our proposed FW
Figure 5: Visualization of
˜
I
0→t
using (a) FW proposed in
(Niklaus and Liu, 2020) and (b) Our FW.
4.4.2 Refinement Structure and Parameters
Compared with the complex GridNet model of (Fou-
rure et al., 2017), our progressive refinement block
is simple but efficient, it focuses more on the details
of the retrieved frames. Fine details are better re-
constructed with the help of learned residues. Using
fewer parameters (1.9M vs 3.0M), our method finally
achieves better performance (in Table 2) and visual
quality (in Fig.4) than SMSP.
To investigate the impact of using multi-levels re-
finement, we carry out experiments either using only
the base layer (with the warped input frames only),
Table 4: Quantitative evaluation of different levels of refine-
ment. The obtained PSNR values are averaged over 3782
frames of the Vimeo90K testset.
Types base 1-layer 2-layer full model
PSNR 35.05 35.19 35.40 35.86
or using one, two, or three levels of refinement of
the warped images features. Table 4 shows averaged
PSNR values when adopting different levels of refine-
ment. The full model using three layers of refinement
gives the best performance.
5 CONCLUSION
In this work, we proposed a flow-based network ar-
chitecture that uses deep features to progressively re-
fine a temporally interpolated frame in a context of
video frame rate up-conversion. We also proposed
a novel finetuning procedure that optimizes flow es-
timation networks for the interpolation task without
using any ground truth optical flows. A comprehen-
sive qualitative and quantitative assessment on differ-
ent video frame interpolation datasets shows that our
method can generate high quality interpolated frames
with realistic details.
REFERENCES
Bao, W., Lai, W., Ma, C., Yang, M., et al. (2019a). Depth-
aware video frame interpolation. In IEEE. Int. Conf.
on Computer Vision and Pattern Recognition (CVPR),
pages 3703–3712.
Bao, W., Lai, W., Zhang, X., Yang, M., et al. (2019b).
Memc-net: Motion estimation and motion compensa-
tion driven neural network for video interpolation and
enhancement. IEEE Trans. Pattern Anal. Mach. Intell.
(TPAMI).
Bao, W., Zhang, X., Chen, L., Ding, L., and Gao, Z.
(2018). High-order model and dynamic filtering for
frame rate up-conversion. IEEE Trans. Image Proc.
(TIP), 27(8):3813–3826.
Bojanowski, P., Joulin, A., Lopez-Paz, D., and Szlam, A.
(2017). Optimizing the latent space of generative net-
works. arXiv preprint arXiv:1707.05776.
Butler, D. J., Wulff, J., Stanley, G. B., and Black, M. J.
(2012). A naturalistic open source movie for opti-
cal flow evaluation. In Eu. Conf. on Computer Vision
(ECCV), pages 611–625.
Choi, M., Kim, H., Han, B., Xu, N., and Lee, K. (2020).
Channel attention is all you need for video frame in-
terpolation. In AAAI Conference on Artificial Intelli-
gence, pages 10663–10671.
Dosovitskiy, A., Fischer, P., Ilg, E., et al. (2015). Flownet:
Learning optical flow with convolutional networks. In
IEEE Int. Conf. on Computer Vision (ICCV).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
338

Fourure, D., Emonet, R., Fromont, E., et al. (2017). Resid-
ual conv-deconv grid network for semantic segmenta-
tion. In British Machine Vision Conf. (BMVC).
Gui, S., Wang, C., Chen, Q., and Tao, D. (2020). Fea-
tureflow: Robust video interpolation via structure-
to-texture generation. In IEEE. Int. Conf. on Com-
puter Vision and Pattern Recognition (CVPR), pages
14004–14013.
Hui, T., Tang, X., and Loy, C. C. (2018). Liteflownet: A
lightweight convolutional neural network for optical
flow estimation. In IEEE. Int. Conf. on Computer Vi-
sion and Pattern Recognition (CVPR), pages 8981–
8989.
Ilg, E., Mayer, N., Brox, T., et al. (2017). Flownet 2.0: Evo-
lution of optical flow estimation with deep networks.
In IEEE. Int. Conf. on Computer Vision and Pattern
Recognition (CVPR), pages 2462–2470.
Ilg, E., Saikia, T., Keuper, M., and Brox, T. (2018). Oc-
clusions, motion and depth boundaries with a generic
network for disparity, optical flow or scene flow esti-
mation. In Eu. Conf. on Computer Vision (ECCV).
Jaderberg, M., Simonyan, K., Zisserman, A., et al. (2015).
Spatial transformer networks. In Advances in Neural
Information Processing Systems (NIPS), pages 2017–
2025.
Jiang, H., Sun, D., Jampani, V., Kautz, J., et al. (2018).
Super slomo: High quality estimation of multiple in-
termediate frames for video interpolation. In IEEE.
Int. Conf. on Computer Vision and Pattern Recogni-
tion (CVPR), pages 9000–9008.
Liu, Z., A, R. Y., Tang, X., Liu, Y., and Agarwala, A.
(2017). Video frame synthesis using deep voxel flow.
In IEEE Int. Conf. on Computer Vision (ICCV), pages
4463–4471.
Meyer, S., Djelouah, A., McWilliams, B., Schroers, C.,
et al. (2018). Phasenet for video frame interpolation.
In IEEE. Int. Conf. on Computer Vision and Pattern
Recognition (CVPR), pages 498–507.
Meyer, S., Wang, O., Zimmer, H., Sorkine-Hornung, A.,
et al. (2015). Phase-based frame interpolation for
video. In IEEE. Int. Conf. on Computer Vision and
Pattern Recognition (CVPR), pages 1410–1418.
Niklaus, S. and Liu, F. (2018). Context-aware synthesis for
video frame interpolation. In IEEE. Int. Conf. on Com-
puter Vision and Pattern Recognition (CVPR), pages
1701–1710.
Niklaus, S. and Liu, F. (2020). Softmax splatting for video
frame interpolation. In IEEE. Int. Conf. on Computer
Vision and Pattern Recognition (CVPR), pages 5437–
5446.
Niklaus, S., Mai, L., and Liu, F. (2017a). Video frame inter-
polation via adaptive convolution. In IEEE. Int. Conf.
on Computer Vision and Pattern Recognition (CVPR),
pages 670–679.
Niklaus, S., Mai, L., and Liu, F. (2017b). Video frame
interpolation via adaptive separable convolution. In
IEEE Int. Conf. on Computer Vision (ICCV), pages
261–270.
Reda, F., Sun, D., Dundar, A., Shoeybi, M., Liu, G., Shih,
K., Tao, A., Kautz, J., and Catanzaro, B. (2019).
Unsupervised video interpolation using cycle consis-
tency. In IEEE. Int. Conf. on Computer Vision and
Pattern Recognition (CVPR), pages 892–900.
Shi, J., Jiang, X., and Guillemot, C. (2020). Learning fused
pixel and feature-based view reconstructions for light
fields. In IEEE. Int. Conf. on Computer Vision and
Pattern Recognition (CVPR), pages 2555–2564.
Soomro, K., Zamir, A. R., and Shah, M. (2012). Ucf101:
A dataset of 101 human actions classes from videos in
the wild. arXiv preprint arXiv:1212.0402.
Sun, D., Yang, X., Liu, M., and Kautz, J. (2018). Pwc-
net: Cnns for optical flow using pyramid, warping,
and cost volume. In IEEE. Int. Conf. on Computer
Vision and Pattern Recognition (CVPR), pages 8934–
8943.
Xu, X., Siyao, L., Sun, W., Yin, Q., and Yang, M. (2019).
Quadratic video interpolation. Advances in Neural In-
formation Processing Systems (NIPS).
Xue, J., Chen, B., T, W., et al. (2019). Video enhance-
ment with task-oriented flow. Int. J. Computer Vision
(IJCV), 127(8):1106–1125.
Deep Video Frame Rate Up-conversion Network using Feature-based Progressive Residue Refinement
339
