
Perceptual Loss based Approach for Analogue Film Restoration
Daniela Ivanova, Jan Paul Siebert and John Williamson
School of Computing Science, University of Glasgow, Glasgow, U.K.
Keywords:
Image Restoration, Perceptual Loss, Restoration Evaluation.
Abstract:
Analogue film restoration, both for still photographs and motion picture emulsions, is a slow and laborious
manual process. Artifacts such as dust and scratches are random in shape, size, and location; additionally,
the overall degree of damage varies between different frames. We address this less popular case of image
restoration by training a U-Net model with a modified perceptual loss function. Along with the novel percep-
tual loss function used for training, we propose a more rigorous quantitative model evaluation approach which
measures the overall degree of improvement in perceptual quality over our test set.
1 INTRODUCTION
Photographic film emulsion, because of its physi-
cal nature, is prone to degradation due to improper
storage and handling or simply over time (Chambah,
2019). One way to ensure the longevity and wider
availability of images (and movies) captured on film
is to digitise them through scanning. Scanning film
often causes random analogue artifacts such as dust
and scratches of different shape, size and colour, to
also be transferred to the digital domain. Dust and
scratch artifacts can occlude a varying degree of the
content of the image and decrease its overall percep-
tual quality.
Image restoration in this context refers to the iden-
tification of such artifacts in film image scans and the
subsequent in-painting of the affected area. While
traditional image processing tools that aim to au-
tomate the task such as Kodak’s Digital ICE (Im-
age Correction and Enhancement) do exist, they can
only be applied to a limited number of colour film
emulsion types and introduce a significant additional
cost through requiring specialised hardware (Field-
ing, 2008). Furthermore, such an approach can only
go so far as to detect the artifacts; the identified areas
would still need to be digitally in-painted.
While convolutional neural network approaches
have been utilised for various image restoration tasks,
such as super-resolution, JPEG artifact removal, de-
raining and denoising with great success, we hypoth-
esise that for such approaches to successfully be ap-
plied to film restoration, meaningful differentiation
between artifacts and useful high frequency image
features has to be learned by the network during
training. In addition, upon evaluation, it is crucial
to quantify the loss of information introduced by the
network, as an ideal network will not only have to re-
move the artifacts present in the input, but also learn
the identity function for inputs where there are no ar-
tifacts.
Informed by the above insight, our main contri-
bution is a perceptual loss function better suited to
the image statistics of dust and scratches. We utilise
the shallower layers of a pre-trained feature extraction
network, and include an additional loss term based
on the Structural Similarity Index (SSIM) percep-
tual quality metric. We demonstrate that the restora-
tion network trained with our novel perceptual loss
formulation improves the achieved perceptual qual-
ity of restored images. Additionally, we show that
the network targets analogue artifacts specifically and
the loss of useful information (such as fine detail for
colour shifts) is decreased. We also describe a more
rigorous way to quantitatively evaluate restoration
quality, taking into account whether the restoration
network introduces new degradation if non-damaged
images are passed as input. As we found that data
sets which could be used for benchmarking model
performance on this specific task are unavailable, our
final contribution is a data set of clean-damaged pairs,
which we produced by applying synthetic artifact
damage to “clean” image scans; we used this data set
both for training and evaluation.
The paper is organised as follows: in Section 2, we
review comparable restoration tasks, as well as state-
of-the-art deep learning approaches for analogue ar-
126
Ivanova, D., Siebert, J. and Williamson, J.
Perceptual Loss based Approach for Analogue Film Restoration.
DOI: 10.5220/0010829300003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
126-135
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
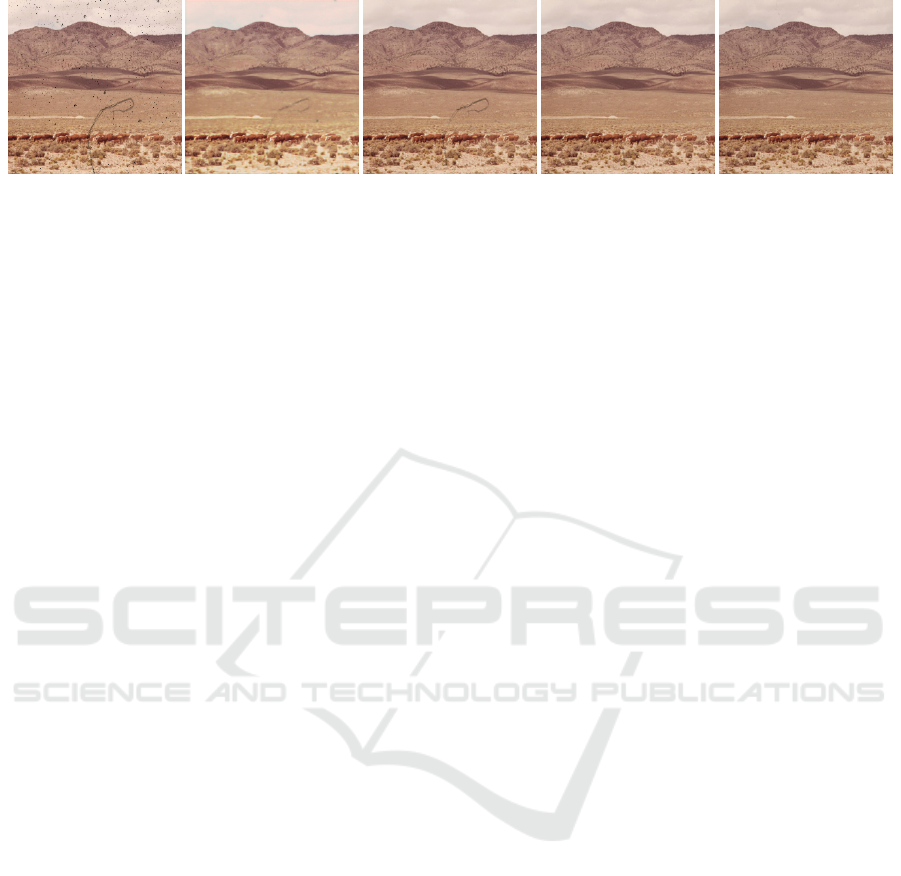
(a) Input. (b) Perceptual loss
prediction.
(c) Modified perceptual
loss prediction (ours).
(d) Modified perceptual
loss with SSIM term
prediction (ours).
(e) Target.
Figure 1: Input (a) has a large scratch artefact and several small dust artefacts. The model which was trained with perceptual
loss (b) blurred the image, introduced a colour shift and lost a lot of fine detail, without removing the large scratch. The model
which was trained with our modified perceptual loss (c) has preserved detail but has not removed the scratch. The final model,
trained with our combined modified perceptual loss with an SSIM loss term (d), has successfully removed most of the large
scratch, while preserving detail and without introducing additional loss of information.
tifact restoration, and consider the difficulty of eval-
uating a restoration task. In Section 3, we detail
our approach, including the architecture used, data
pre-processing, training and evaluation methodolo-
gies and perceptual loss formulations. Finally, in Sec-
tion 4, we discuss the results of our experiments, in-
cluding qualitative and quantitative comparisons with
both existing perceptual losses used for colourisation
and super-resolution and a state-of-the-art old photo
restoration approach.
2 RELATED WORK
Some of the most exciting state-of-the-art deep learn-
ing approaches have captured the attention of both
researchers and the general public through demon-
strating compelling results in the task of colourisa-
tion of old black-and-white photographs (Zhang et al.,
2016; Zhang et al., 2017; Antic, 2020). These ap-
proaches leverage a learned prior over low frequency,
global image context features to generate missing
colour information. The successful application of
similar Convolutional Neural Network techniques has
also been demonstrated in low level image restoration
tasks, such as in-painting (Mao et al., 2016; Ulyanov
et al., 2018), denoising (Mao et al., 2016; Ulyanov
et al., 2018), deraining (Meng Tang et al., 2018;
Fan et al., 2018), superresolution (Mao et al., 2016;
Ulyanov et al., 2018; Ledig et al., 2017). Virtually all
such state-of-the-art approaches, with the exception
of Deep Image Prior, rely on training the networks on
large datasets of ”natural” images, such as ImageNet.
However, research on film artifact removal is
scarce. In the literature, Strubel et al. proposed a
SegNet encoder-decoder architecture which is trained
with a cross entropy loss to remove dust and scratches
for a purpose-built data set of black and white im-
age pairs of dusty scans and their matching manually
repaired versions (Strubel et al., 2019). Mironica et
al. presents an approach based on generative adver-
sarial training, in which the generator is trained to
restore artifacts using a perceptual loss function in-
spired by style transfer approaches (Johnson et al.,
2016) as the reconstruction loss (Mironic
˘
a, 2020).
Perceptual loss in a GAN setting has also been ap-
plied to colourisation in the DeOldify project (An-
tic, 2020). An alternative approach based on Varia-
tional Autoencoders (VAEs) is proposed by Wan et al.
The authors train two VAEs on the domains of dam-
aged and restored images respectively, and use their
learned latent spaces as an in-between domain for the
translation from a damaged to a restored image. The
networks are trained using synthetic paired data (Wan
et al., 2020). To our knowledge this is the state-of-
the-art approach for old photographs restoration - a
task which is the most closely aligned with film scan
artifact restoration.
Automated digital image restoration quality evalu-
ation is another understudied topic. It is a difficult one
as many metrics depend on the existence of ground
truth restored images to compare to, and in real life
restoration scenarios those are not readily available.
Other metrics which utilise models of the human vi-
sual system to measure perceived quality may miss
distortions which are below the threshold of visibil-
ity (Chambah, 2019). Finally, the quality of restora-
tion is dependent on objective properties such as the
size and detectability of artifacts with respect to im-
age resolution, but also to the subjective definition and
scope of what makes a perceptually good restoration:
should we only in-paint artifacts, or additionally cor-
rect colour shifts, should we remove or preserve grain,
etc. In any case it is clear that a good restoration ap-
proach should minimise additional loss of informa-
tion. Neural networks can introduce checkerboard
Perceptual Loss based Approach for Analogue Film Restoration
127

artifacts (Aitken et al., 2017), GAN-artifacts (Zhang
et al., 2019), while VAEs producing blurry outputs
is an empirically observed and extensively addressed
problem (Bousquet et al., 2017). All of the above
restoration methods mentioned in the literature use
standard denoising evaluation metrics, such as Peak
signal-to-noise ratio (PSNR) and Sructural similar-
ity index measure (SSIM) to quantitatively evaluate
the quality of restoration. While the results shown in
these works are impressive, there is a lack of quanti-
tative evaluation in terms of novel damage or loss of
information introduced by the restoration networks.
Our experiments with passing non-damaged images
through the restoration networks and measuring the
perceptual quality of the outputs aims to address this
gap.
3 APPROACH
3.1 Restoration Network Architecture
A restoration network’s aim is to translate the in-
put corrupted image to a ”restored” version of it; a
state-of-the-art architecture used for this type of task
is U-net with skip connections. U-net falls within
the encoder-decoder family of network architectures,
where the encoder is responsible for downsampling
the input to a compact feature-vector form, which is
then used by the second part, the decoder, to translate
it back to the image domain. In our case, the target
domain is the domain of ”clean”, natural images with
no dust and scratches present. The skip-connections
between each up- and down-sampling stages in the
U-Net present an advantage over simpler encoder-
decoder architectures, effectively aiding the network
in preserving intermediate multi-scale representations
of the input created during the down-sampling phase,
which are then used during up-sampling to better
model high-frequency features at larger resolutions.
This is empirically demonstrated by U-Net’s initial
success in medical segmentation tasks that require a
highly precise image (segmentation mask) output.
We leverage the U-net’s morphological separation
of clearly defined encoder and decoder sections by us-
ing pre-trained weights for the ResNet34 architecture
provided by PyTorch as the encoder part. Two addi-
tional convolutional layers are added as the bottleneck
of the ”U” shape in order to transition to the decoder
part of the overall network. The decoder is tasked
with utilising the encoded natural features to sepa-
rate out the artifacts and generate image data of high
perceptual quality. Inspired by the DeOldify imple-
mentation (Antic, 2020), that can be achieved by us-
ing sub-pixel convolution for the upsampling blocks
that make up the decoder (Shi et al., 2016a; Shi et al.,
2016b). To minimise checkerboard artefacts that can
be introduced during the upsampling process, self-
attention (Zhang et al., 2018) is added to the second
upsampling block, counting from the bottleneck. The
input image itself is also concatenated with a dense
cross-connection to the input of the last upsampling
block in the decoder, to further address the problem
of preserving fine detail. Finally, sigmoid range acti-
vation is applied to produce a 3-channel RGB image
with the same spatial size as the input.
3.2 Dustified Data Set
For our data set, we used digitised versions of Ko-
dachrome slides from the Documerica
1
series made
available by The US National Archives through
Flickr. Overall, 6232 Documerica images were col-
lected using the Flickr API. The first pre-processing
step is to resize and center-crop the raw images. Re-
sizing is carried out by using inter area interpolation,
so that there is minimal image quality loss. The com-
plete data set is available at https://archive.org/details/
documerica.
To generate damaged versions of the collected im-
ages, a randomly selected patches from a set of dust
and scratch overlays
2
were applied to each of the 6232
”raw” images. Since the images we use are slide
scans, the colour of the artifacts we simulate is black.
While the random nature of artefacts like dust and
scratches is impossible to perfectly replicate in a de-
terministic way, the following simple approach was
devised to generate a unique scratch overlay for every
clean image: randomly select a dust overlay, crop a
random square patch from it, warp and invert it, then
apply to the image. For each image, this was per-
formed twice, so that the dust pattern on each image
is a different random combination of two dust over-
lays. This step was performed for each corresponding
target size, i.e. 64 by 64, 128 by 128 and 256 by 256
pixels, resulting in different patterns for the three dif-
ferent sizes of the same clean image. An example is
provided in Figure 2.
We split the data set using a 8:1:1 training-
validation-test ratio, resulting in 4895 pairs in the
training set, 623 in the validation set, and 624 in the
test set.
1
https://www.flickr.com/photos/usnationalarchives/
collections/72157620729903309/
2
https://blog.spoongraphics.co.uk/freebies/30-free-
film-dust-textures-add-dirty-effects-work
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
128

(a) 64x64 pixels. (b) 128x128 pixels. (c) 256x256 pixels.
Figure 2: Three dustified versions of the same image from the data set at three different resolutions. Notice that the damage
”pattern” is different for each size as to help the network generalise better.
3.3 Proposed Perceptual Loss Function
Instead of explicitly comparing two images in the
pixel domain, another network can be used as a com-
parison tool. That is, we aim at comparing the gener-
ated output with the target via a pre-trained network’s
feature space to allow for a more comprehensive ex-
pression of the difference. Perceptual loss as used for
style transfer is defined by two terms, representing the
style and content of the generated and the target im-
age through the feature activations of the pre-trained
loss network’s hidden layers. The content feature loss
is the sum of the element-wise difference between the
feature maps extracted from each of the ReLU lay-
ers of a pre-trained VGG16 network (Johnson et al.,
2016). The authors chose Euclidean distance in the
original paper, whereas DeOldify uses Manhattan dis-
tance (Antic, 2020) when adapting the perceptual loss
approach to a colour restoration task. The style loss
is calculated in a similar way, however, the feature
maps need to be transformed to a spatially-invariant
form first - the idea of style loss is to measure the dif-
ference between the distributions of the feature map
activations, as well as the correlation between features
within each feature map that is produced (Johnson
et al., 2016). To find the correlation between fea-
tures within a feature mapping, the Gram matrix of
the feature map is calculated; the Gram matrix is the
dot product between each pair of flattened feature vec-
tors in the feature map. Therefore, the Gram matrix
measures which features tend to activate together.
The terms corresponding to feature activations ex-
tracted from each layer which comprise the style and
content loss sums can also be weighted. The weights
used in the DeOldify project are 0, 0, 20, 70, 10 for
each respective ReLU layer in the VGG16 network
(Antic, 2020); the activations extracted from the first
two ReLUs are ignored. We propose that these lay-
ers are indeed relevant for the task of detecting small
scale analogue artifacts as well as preserving high
frequency image features, and conduct a small pre-
liminary experiment, based on which we revise the
weights for both the style and content loss sum terms.
In addition we propose a term representing an-
other measure of perceptual quality, based on the
SSIM index (Wang et al., 2004), which we call self-
similarity loss. As we seek to maximise the SSIM
index during restoration, we have defined the self-
similarity loss as:
D
SSIM
(x, y) = 1 − SSIM(x, y), (1)
where x and y can be images or feature maps.
Since the feature maps produced by each layer of
the feature extractor do hold spatially relevant infor-
mation, we decide to employ the self-similarity loss
as a distance measure between feature representations
for each layer in the content loss term in our final loss
formulation. We trained the restoration network with
three different perceptual loss functions, all based on
the activations extracted from a pre-trained VGG16:
Model 1: We assigned the layer weights as used in the
DeOldify project, i.e. 0, 0, 20, 70, 10 (Antic, 2020)
corresponding to layers 5, 12, 22, 32, 42 from VGG16
(ReLUs). We also used the same distance function as
DeOldify, i.e. mean absolute error (MAE).
Model 2: Based on our proposition that earlier
layer activations are relevant to the analogue artifact
restoration task, we assign the following weights each
of the five ReLUs: 2, 4, 5, 6, 6. Again, we use MAE
as the distance measure for both style loss and content
loss.
Model 3: We train with the weights of Model 2, and
also add our own distance metric - SSIM loss (see
Equation 1) with a window size of 5 by 5 pixels. We
use the SSIM loss as a distance measure between the
prediction and target images, as well as the distance
Perceptual Loss based Approach for Analogue Film Restoration
129
function in the content loss term; for the style loss
term, we use MAE, and we also measure the MAE
distance between the target and the prediction.
3.4 Training Procedure
For each of the three perceptual loss configurations
in our experiments, a network with our proposed ar-
chitecture is trained progressively over three different
input sizes for 10 epochs. The training and validation
data is loaded as matched image pairs of 3-channel
images from the clean and dustified classes at each
respective resolution. The data is normalized and
scaled using the ImageNet data set’s overall mean and
standard deviation values (per-channel) (Deng et al.,
2009). We applied the following data augmentation
on the training set, with specific probabilities of ap-
plying the transformation listed: random horizontal
flip, probability 50%; symmetric warp with magni-
tude between (-0.25, 0.25), probability 75%; random
zoom up to x1.5, probability 75%; brightness varia-
tion between (0.25, 0.75), probability 75%; contrast
scaling between (0.5, 2.0), probability 75%.
During training, the ResNet34 encoder is frozen
- therefore the feature space learned from ImageNet
is preserved and used to encode the damaged in-
put. When decoder layers are initially appended to
a pre-trained backbone, their weights are randomly
initialised. We use One cycle training policy (Smith
and Topin, 2019) to drastically reduce training times:
the learning rate is increased for 80% of the iter-
ations where the encoder is frozen. An additional
training phase at the highest resolution is performed
for another 20 epochs, by unfreezing the backbone
and fine-tuning the encoder, again using One cy-
cle training policy, this time increasing the learn-
ing rates only 50% of the time. The loss landscape
is optimised via the Adam optimiser, with the Py-
Torch default betas and weight decay set to 1e − 3
(Kingma and Ba, 2014). Python notebooks con-
taining the training, evaluation and links to the fi-
nal trained models’ weights are available at https:
//github.com/daniela997/DustScratchRemoval.
4 EXPERIMENTS
4.1 Experimental Methodology
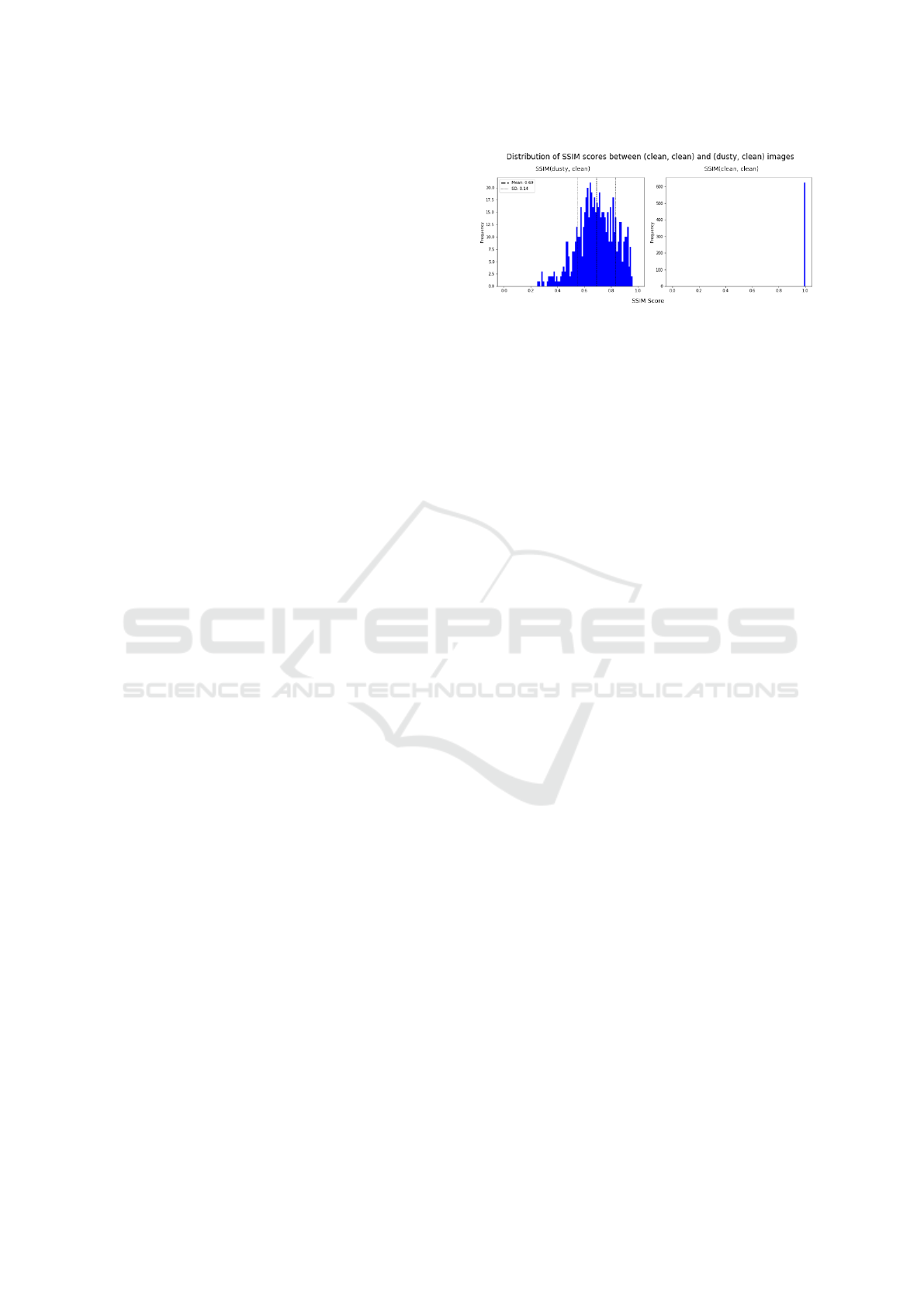
For our experiments, we calculate the SSIM scores
for each clean-dustified pair, in the training set and
plot the distribution of the result. The distribution of
the obtained values is displayed in Figure 3. We also
show that the SSIM between every clean image and
Figure 3: Distribution of SSIM scores for items in the test
set. The SSIM score is obtained for each image pair in the
test set.
itself is equal to 1. Therefore, a restoration network’s
task is to squish the left histogram so that it resem-
bles the one on the right as much as possible, for both
damaged and clean input.
The damage present in the test set is varied, as
evidenced by the wide range of SSIM scores obtained
by the set of clean-dustified pairs: lowest score is 0.2
SSIM (i.e. a large degree of damage is present), while
the highest score is 0.97 SSIM (i.e. very little damage
is present). As all clean-dustfied pairs produced SSIM
scores of less than 1, we can confirm that all damaged
images in each pair have some degree of damage.
We hypothesise that a well-trained restoration net-
work should be able to map multiple versions of an
image with varying degrees of damage to the same
restored version. Furthermore, we observe that if
an already non-damaged image is passed through the
restoration network, the SSIM score between the in-
put and the output should be 1, i.e. a perfect restora-
tion network should learn the identity transform and
not change the input, since no damage is present.
For this, we designed an experiment inspired by the
above observation. We, therefore, pass clean images
through the restoration network, and measure how
much damage is introduced by the network. Addition-
ally, we seek to quantify the degree of improvement
seen across the test set when predictions are made on
dustified images. We calculate the difference between
the SSIM score of each clean-dustified pair and the
SSIM score of each corresponding clean-restored pair
to produce the δSSIM measure.
4.2 Experiment on Layer Response to
the Presence of Dust and Scratches
The activations extracted from the first two ReLUs
of the VGG16 loss network are ignored (their corre-
sponding weights are set to 0) in the DeOldify project
implementation for perceptual loss (Antic, 2020).
This could be explained with the fact that low-level
features learned by earlier layers are not relevant to
the task of colourisation, since to colourise something
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
130
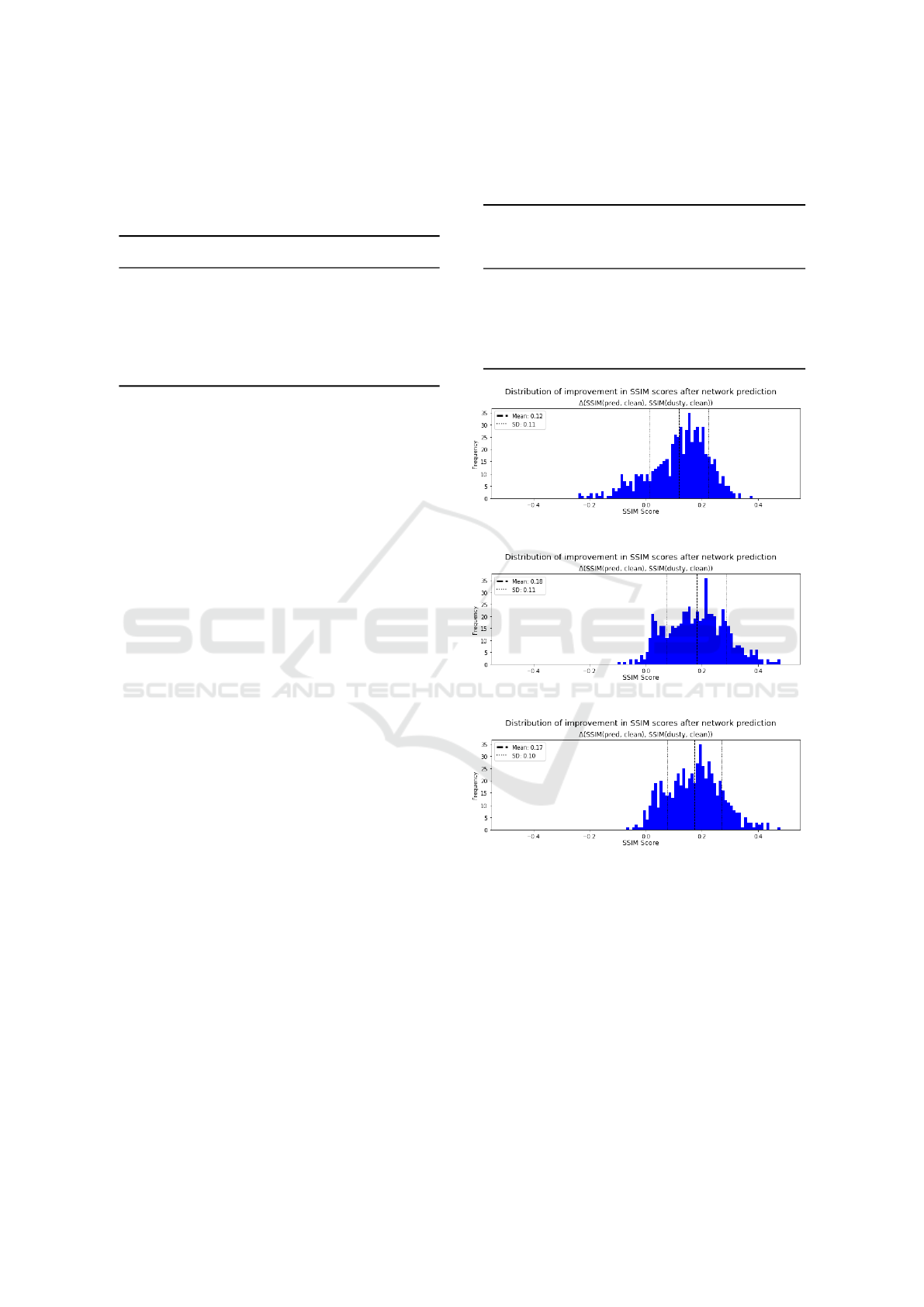
Table 1: Number of different filters within the top 9 filter
sets for the clean and dustified version of each image. If
all filters in both top 9 sets are the same (irrespective of
ranking), the result would be 0 different filters, and on the
contrary, if they are all different, the result would be 18.
Image 1 Image 2 Image 3
ReLU 5 0 4 0
ReLU 12 10 10 6
ReLU 22 6 8 2
ReLU 32 14 16 6
ReLU 42 14 12 12
in a correct way, a higher-level, semantic knowledge
is required, and that is learned by the deeper layers of
the VGG16 network. On the other hand, we hypoth-
esise that the activations for shallower layers could
be relevant to the task of artefact removal and should
not be discarded. At the same time, high-level se-
mantic knowledge from the learned image prior of the
deeper layers is still important in distinguishing dust
and scratches from contextually meaningful high fre-
quency features with similar statistics, such as edges,
fine lines, strands of a person’s hair.
For this preliminary experiment, we selected three
image pairs from our data set with varying degree of
damage, which we pass through the pre-trained fea-
ture extractor loss network - VGG16. For each photo,
we extract the activations of the ReLU layers of the
VGG16 network which are used in the perceptual loss
formulation - i.e. layers 5, 12, 22, 32, 42. Each of
those will have 64, 128, 256, 512 and 512 feature
maps (filters), as per the VGG16 architecture defini-
tion. The mean activations for each filter and the 9
most activated filters are recorded and shown in Table
1. These results, while limited, demonstrate that the
activations from earlier layers in the feature extractor
network are indeed responsive to the presence of dust
and scratches, and therefore relevant to the perceptual
loss formulation.
4.3 Quantitative Comparison of
Perceptual Losses
We assess the ability to restore artefacts, and measure
what degree of new damage is introduced to clean im-
ages, for each model, through calculating the SSIM
score between the model’s prediction and the target
clean image. We compare the obtained distributions
to the SSIM score distributions of the clean-dustified
pairs in the test set (see Figure 3), as well as a baseline
model trained and fine-tuned using per-pixel Mean
Squared Error loss. Results are summarised in Ta-
Table 2: Summary of mean and standard deviation values
for the SSIM scores distribution obtained by each percep-
tual loss model on the test set of 624 image pairs.
SSIM of
Predictions on
dustified images
SSIM of
Predictions on
clean images
Mean SD Mean SD
MSE Model 0.84 0.07 0.95 0.04
Model 1 0.80 0.08 0.77 0.08
Model 2 0.88 0.05 0.94 0.04
Model 3 0.88 0.05 0.98 0.02
(a) Model 1 - perceptual loss
(b) Model 2 - modified perceptual loss
(c) Model 3 - modified perceptual loss with SSIM term
Figure 4: Distribution of improvement (δSSIM) for predic-
tions on the test set for the three perceptual loss models.
These histograms show us by how much images with ar-
tifacts present increased (or decreased) their SSIM scores
after being restored by each network.
ble 2 and compared to the model trained using MSE
pixel loss as a baseline. A mean of 1.0 and standard
deviation of 0.0 is ideal for both predictions on clean
and dustified images - it would mean that the model
has perfectly repaired the dustified images, and has
perfectly preserved the clean images.
Model 1 obtained worse scores than the model
trained using simple pixel MSE as loss function. It
Perceptual Loss based Approach for Analogue Film Restoration
131

obtained an especially low mean value for the SSIM
scores of predictions made on clean images. This sug-
gests that the network has a destructive effect on non-
artefact high frequency features, as only activations
from deeper VGG16 layers are included in the loss
function. Model 2 has a higher mean value than both
the baseline and Model 1 for SSIM scores on predic-
tions over dustified images, as well as smaller spread
of the overall distribution. The mean SSIM scores for
predictions on clean images is comparable to that of
the baseline and much better than those obtained by
Model 1, which demonstrates that the inclusion of the
first two ReLU layers in the loss function aided Model
2 in learning to preserve non-artefact image informa-
tion much better than Model 1. Model 3 includes the
addition of SSIM loss term between prediction and
target, as well as as a distance measure for compar-
ing feature activations in the content loss term of the
feature loss. The mean and standard deviation for the
SSIM scores are the same as Model 2 - however, this
final model obtained the highest mean SSIM score on
predictions over clean test images, 0.98, along with
smallest standard deviation, 0.02, demonstrating that
it was by far the least intrusive out of all networks we
trained.
We use our δSSIM measure to quantify the degree
of ”improvement” the network introduced in predic-
tions on dustified images, shown in Figure 4. Model
3 achieved the smallest spread of δSSIM. Both Model
2 and 3 and produced a smaller number of predictions
which obtained lower SSIM after they were restored
by the network (i.e. they have δSSIM below 0).
To summarise, we found that the inclusion of acti-
vations from the earlier ReLU layers from the VGG16
network helped preserve detail, minimise colour shift
and improve the quality of in-painting. Additionally,
the introduction of SSIM loss as part of the the per-
ceptual loss to compare both predictions and target,
and the feature activations from each ReLU layer in
the content loss, allowed the the network to generalise
over different artefact sizes and shapes, and made it
minimally invasive to areas with no damage.
4.4 Comparison with State-of-the-Art
Restoration Approaches
We also compare our approach against an alterna-
tive deep learning image restoration approach which
involves training two Variational Autoencoders on
damaged and restored photos respectively, and us-
ing their learned latent spaces to transform an image
from one domain to the other (Wan et al., 2020). The
method based on Deep Latent Space Translation via
VAEs frames the restoration problem not only as dust
Table 3: Summary of mean and standard deviation values
for the SSIM scores distribution obtained by a state-of-the-
art restoration approach and by our approach on the test set
of 624 image pairs.
SSIM of
Predictions on
dustified images
SSIM of
Predictions on
clean images
Mean SD Mean SD
MSE Model 0.84 0.07 0.95 0.04
Wan et al. 0.68 0.06 0.72 0.07
Ours 0.88 0.05 0.98 0.02
(a) Wan et al., 2020
(b) Ours
Figure 5: Comparison between a state-of-the-art restora-
tion approach against our approach based on achieved SSIM
scores of restorations.
and scratch removal, but also include other types of
restoration such as colour correction and smoothing.
Still, the authors provide pre-trained model weights
which specifically target scratches; we therefore used
these model weights in our experiment. A visual com-
parison of the achieved restorations is shown in Fig-
ure 6. We can see that the VAE-based model has
smoothed the image, removed small dust specks and
shifted the overall tint of the image towards green.
The latter is expected as Wan et al. (Wan et al., 2020)
trained their model on sepia-toned and discoloured
examples as well, in the case of which restoration is
understood as colour correction.
We quantitatively evaluated the approach of Wan
et al. against ours using the methodology based on the
SSIM metric described in Section 3.5. A summary of
the achieved scores accross the test set is provided in
Table 3 and Figure 5.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
132

(a) Input (b) Wan et al., 2020 (c) Ours (d) Target
Figure 6: Visual comparison between the restored predictions for (a) damaged inputs generated by (b) VAE-based Deep Latent
Space Translation (Wan et al., 2020) and (c) our approach, where (d) are the clean targets. Image in the first row is from the
validation set, rows 2-5 are from the test set.
Perceptual Loss based Approach for Analogue Film Restoration
133

Comparing the histograms against the ones for the
initial test set scores in Figure 3, we can see that
our model performend better at improving the SSIM
scores on the damaged test images. Additionally, we
found that the VAE-based approach was highly dam-
aging to clean images compared to ours. This is ex-
plained partially by the colour shifts, but also through
the loss of fine detail and inability to remove larger
scratches, as shown in Figure 5 (first row). Addition-
ally, the Wan et al. method introduced checkerboard
artifacts to some examples Figure 5 (third row) and
struggled to reconstruct faces Figure 5 (second row).
In the case of signs and handwriting, no meaning-
ful differentiation is made between artifacts and lines
forming the letters, which results in failure to restore
writing Figure 5 (fourh and fifth row). On the other
hand, our model has successfully targeted only exist-
ing artifacts, and minimised the introduction of new
damage or loss of information.
5 CONCLUSION
The work presented in this paper demonstrates that
our approach achieves improved quality of restoration
at the task of automated dust and scratch removal for
analogue film scans when compared to state-of-the-
art. We adapt an architecture and training techniques
from the literature, and use those along with our per-
ceptual loss comprising of both exracted VGG16 fea-
ture activations and SSIM-based terms. By combin-
ing the learned natural prior of a pre-trained CNN-
based architecture with a perceptual quality metric
which targets image degradation in our loss formu-
lation, we allow the network to meaningfully differ-
entiate between dust and scratches and useful high-
frequency image features. Our model achieved bet-
ter SSIM scores compared to the VAE-based method
of Wan et al.; while this can be attributed to our ap-
proach explicitly optimising for SSIM during train-
ing, our qualitative results demonstrate that our ap-
proach is much more reliable in both restoring dust
and scratches, and preserving high frequency image
detail.
Additionally, we discuss a more comprehensive
approach to evaluating restoration quality, which also
includes measuring the information loss or new arti-
facts introduced by the restoration networks. We also
provide a data set of synthetically damaged slide film
scans to be used for benchmarking of the specific task
of dust and scratch removal for film.
As future work, we plan to collect a data set of
wild damaged film scans to evaluate our approach and
other existing approaches on real damaged input. Ad-
ditionally, when training on synthetic data where the
ground truth clean scan is available, we plan to ex-
plicitly incorporate our requirement that the network
should not damage clean inputs in the loss formula-
tion.
ACKNOWLEDGEMENTS
We thank Gerardo Aragon-Camarasa for his valuable
comments and feedback while preparing this paper.
This work was supported by the Engineering and
Physical Sciences Research Council (EPSRC) [grant
number EP/RS13222/1].
REFERENCES
Aitken, A., Ledig, C., Theis, L., Caballero, J., Wang, Z., and
Shi, W. (2017). Checkerboard artifact free sub-pixel
convolution: A note on sub-pixel convolution, resize
convolution and convolution resize. arXiv preprint
arXiv:1707.02937.
Antic, J. (2020). Deoldify: A deep learning based project
for colorizing and restoring old images (and video!).
Bousquet, O., Gelly, S., Tolstikhin, I., Simon-Gabriel, C.-J.,
and Schoelkopf, B. (2017). From optimal transport to
generative modeling: the vegan cookbook.
Chambah, M. (2019). Digital film restoration and image
quality. In ICA-BELGIUM Colour Symposium, Ghent,
Belgium.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
Fan, Z., Wu, H., Fu, X., Huang, Y., and Ding, X. (2018).
Residual-guide feature fusion network for single im-
age deraining. CoRR, abs/1804.07493.
Fielding, G. (2008). Digital ice: Defect detection and cor-
rection using infrared-enabled scanners.
Johnson, J., Alahi, A., and Fei-Fei, L. (2016). Perceptual
losses for real-time style transfer and super-resolution.
In European conference on computer vision, pages
694–711. Springer.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Ledig, C., Theis, L., Husz
´
ar, F., Caballero, J., Cunningham,
A., Acosta, A., Aitken, A., Tejani, A., Totz, J., Wang,
Z., et al. (2017). Photo-realistic single image super-
resolution using a generative adversarial network. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 4681–4690.
Mao, X.-J., Shen, C., and Yang, Y.-B. (2016). Im-
age restoration using convolutional auto-encoders
with symmetric skip connections. arXiv preprint
arXiv:1606.08921.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
134

Meng Tang, L., Hong Lim, L., and Siebert, P. (2018). Re-
moval of visual disruption caused by rain using cycle-
consistent generative adversarial networks. In Pro-
ceedings of the European Conference on Computer
Vision (ECCV), pages 0–0.
Mironic
˘
a, I. (2020). A generative adversarial approach with
residual learning for dust and scratches artifacts re-
moval. Proceedings of the 2nd Workshop on Structur-
ing and Understanding of Multimedia heritAge Con-
tents.
Shi, W., Caballero, J., Husz
´
ar, F., Totz, J., Aitken, A. P.,
Bishop, R., Rueckert, D., and Wang, Z. (2016a). Real-
time single image and video super-resolution using an
efficient sub-pixel convolutional neural network. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 1874–1883.
Shi, W., Caballero, J., Theis, L., Huszar, F., Aitken, A.,
Ledig, C., and Wang, Z. (2016b). Is the deconvolu-
tion layer the same as a convolutional layer? arXiv
preprint arXiv:1609.07009.
Smith, L. N. and Topin, N. (2019). Super-convergence:
Very fast training of neural networks using large learn-
ing rates. In Artificial Intelligence and Machine
Learning for Multi-Domain Operations Applications,
volume 11006, page 1100612. International Society
for Optics and Photonics.
Strubel, D., Blanchon, M., and David, F. (2019). Deep
learning approach for artefacts correction on photo-
graphic films. In Cudel, C., Bazeille, S., and Ver-
rier, N., editors, Fourteenth International Conference
on Quality Control by Artificial Vision, volume 11172,
pages 156 – 161. International Society for Optics and
Photonics, SPIE.
Ulyanov, D., Vedaldi, A., and Lempitsky, V. (2018). Deep
image prior. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
9446–9454.
Wan, Z., Zhang, B., Chen, D., Zhang, P., Chen, D., Liao, J.,
and Wen, F. (2020). Bringing old photos back to life.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE transactions on
image processing, 13(4):600–612.
Zhang, H., Goodfellow, I., Metaxas, D., and Odena, A.
(2018). Self-attention generative adversarial net-
works. arXiv preprint arXiv:1805.08318.
Zhang, R., Isola, P., and Efros, A. A. (2016). Colorful im-
age colorization. In European conference on computer
vision, pages 649–666. Springer.
Zhang, R., Zhu, J.-Y., Isola, P., Geng, X., Lin, A. S., Yu, T.,
and Efros, A. A. (2017). Real-time user-guided image
colorization with learned deep priors. ACM Transac-
tions on Graphics (TOG), 9(4).
Zhang, X., Karaman, S., and Chang, S.-F. (2019). Detecting
and simulating artifacts in gan fake images. In 2019
IEEE International Workshop on Information Foren-
sics and Security (WIFS), pages 1–6. IEEE.
Perceptual Loss based Approach for Analogue Film Restoration
135
