
Human Detection and Gesture Recognition for the Navigation of
Unmanned Aircraft
Markus Lieret
a
, Maximilian H
¨
ubner
b
, Christian Hofmann
c
and J
¨
org Franke
d
Institute for Factory Automation and Production Systems, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg (FAU),
Egerlandstr. 7-9, 91058 Erlangen, Germany
Keywords:
Machine Learning, Gesture Recognition, Computer Vision, Unmanned Aircraft, Indoor Navigation.
Abstract:
Unmanned aircraft (UA) have become increasingly popular for different industrial indoor applications in recent
years. Typical applications include the automated stocktaking in high bay warehouses, the automated transport
of materials or inspection tasks. Due to limited space in indoor environments and the ongoing production, the
UA oftentimes need to operate in less distance to humans compared to outdoor applications. To reduce the
risk of danger to persons present in the working area of the UA, it is necessary to enable the UA to perceive
and locate persons and to react appropriately to their behaviour.
Within this paper, we present an approach to influence the flight mission of autonomous UA using different
gestures. Thereby, the UA detects persons within its flight path using an on-board camera and pauses its current
flight mission. Subsequently, the body posture of the detected persons is determined so that the persons can
provide further flight instructions to the UA via defined gestures. The proposed approach is evaluated by
means of simulation and real world flight tests and shows an accuracy of the gesture recognition between 82
and 100 percent, depending on the distance between the persons and the UA.
1 INTRODUCTION
In recent years, unmanned aircraft (UA) have become
increasingly popular in numerous areas of applica-
tion. Typical applications include filming and pho-
tography, surveying and inspection and the transport
of medical goods. All listed application benefit in
particular from the flexibility and three-dimensional
workspace of the UA. In addition to those examples,
intensive research is also being conducted on the use
of autonomous UA in industrial contexts. Thereby,
possible fields of application include the automation
of stocktaking processes or inspections and the trans-
port of urgently needed components within a factory
site and between different locations.
However, the advantages of UA are countered by
numerous concerns from the population. Studies have
shown that 40 % of the population in Germany, for
example, still have a rather negative attitude toward
drones. In addition to the possible infringement on
privacy, the reasons cited include the risk of crashes
a
https://orcid.org/0000-0001-9585-0128
b
https://orcid.org/0000-0003-2761-7046
c
https://orcid.org/0000-0003-1720-6948
d
https://orcid.org/0000-0003-0700-2028
and associated injuries. Further, the rotating pro-
pellers of the commonly used multirotor systems also
pose a high risk of injury. (Eißfeldt et al., 2020) (Li-
dynia C., 2017)
Particularly in industrial applications where UA
can operate in the direct vicinity of persons (e.g. dur-
ing material delivery or stocktaking in high bay ware-
houses), suitable measures must be taken to exclude
hazards to persons and to ensure the acceptance of the
UA. One of the most commonly used measure to re-
duce the risk of injury is the complete enclosure of
rotors or the entire UA. However, since this reduces
the usable payload of the UA, systems have also been
developed that abruptly stop a rotor before a possible
collision (Pounds and Deer, 2018). As this system can
lead to an unintended crash of the UA that endangers
people, practical safety measures for UA currently
still rely on spatial or structural separation of the UA
and human workers. However, this reduces the UA’s
application possibilities and flexibility, which is why
these measures are not expedient in the medium term.
The research also focuses on the detection and lo-
calization of persons in the working area of the UA
in order to be able to derive appropriate emergency
measures before a hazardous situation occurs. For
Lieret, M., Hübner, M., Hofmann, C. and Franke, J.
Human Detection and Gesture Recognition for the Navigation of Unmanned Aircraft.
DOI: 10.5220/0010832500003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
831-838
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
831

example, radio frequency identification (RFID) sys-
tems (Koch et al., 2007) and high-visibility vests de-
tected by a colour camera (Mosberger and Andreas-
son, 2013), have been identified as fundamentally
suitable systems. However, since these approaches
require adjustments to the existing infrastructure and
presuppose that the persons to be detected carry an
RFID reader with them or reliably wear their per-
sonal protective equipment, these solutions are also
only suitable for practical use to a limited extent.
In order to be able to use autonomous UA pur-
posefully in areas where people are present and to
minimize the risk to these people, it is necessary that
people can be reliably detected with sensors that are
located exclusively on the UA. Additionally, it must
be possible for the UA to react to instructions from
these persons, for example to initiate an emergency
landing or continue its current mission after explicit
clearance.
Therefore, in the following a methodology is pre-
sented in which the UA uses an on-board RGB-D
camera to capture the area in the direction of flight and
recognizes persons present based on the colour image.
Subsequently, the colour and depth data is used to de-
termine the current pose and posture of the detected
persons so that the persons can give instructions to
the UA using simple gestures. The main contribu-
tions of this paper are the architecture of the overall
system used to locate persons, react to their gestures
and thus to enable a safe interaction between the UA
and persons. Beyond, a novel approach to recognize
and distinguish different gestures is presented.
2 RELATED WORK
Crucial for reliable gesture-based control of robots is
the methodology used for gesture recognition. Due
to the rapid development of machine learning meth-
ods in recent years, these have become an established
tool for various available variants of gesture recog-
nition. Nowadays, a large number of models ex-
ist that determine the human pose in two- or three-
dimensional space based on colour and depth images.
(Chen et al., 2020) Furthermore, various commer-
cially available cameras and sensor systems such as
Microsoft’s Kinect series already support direct com-
putation of human body posture when using the pro-
vided software development kits. (Le et al., 2013)
Available approaches for gesture-based control of
UA can be fundamentally divided into two categories.
There are approaches in which neural networks are
used to classify discrete body postures or recognize
body parts. Afterwards a flight command is executed
based on the detected body posture or the relation of
the recognized body parts to one another. This con-
trasts with methods where flight commands are ex-
ecuted based on gestures, which are derived from a
skeleton model, determined using machine learning
methods.
Maher et al. (Maher et al., 2017) use the YOLOv2
object detector to detect and locate the head and both
hands in colour images. Individual gestures are then
defined using the relative position between the right
and left hand and the head, and linked to defined
flight actions. The functionality of the resulting ges-
ture control is eventually verified in an experiment. A
similar approach is presented by Zhang et al. (Zhang
et al., 2019a). They use MobileNet-SSD as detection
network and also detect and locate the head and both
hands to derive gestures to control a mobile robot.
With their approach they are able to identify around
87 percent of the defined gestures correctly.
Instead of deriving the gestures from the position
of different body parts, Kassab et al (Kassab et al.,
2020) train different deep classification frameworks
to identify the defined gestures in an image.
Sanna et al. (Sanna et al., 2012) present a system
using a stationary Kinect camera in conjunction with
the NITE skeleton tracker to relay motion commands
to the UA using various gestures. The NITE skeleton
tracker is also used by Yu et al. (Yu et al., 2017) in
conjunction with the Asus Xtion Pro Live. The au-
thors show that the average gesture recognition rates
are greater than 90 % in this case. A similar setup
is used by Tellaeche et al. (Tellaeche et al., 2018)
to control a drone. Instead of geometric relationships
between the joint points, an adaptive naive bayes clas-
sifier is used to determine the gestures. Again, the au-
thors are able to achieve gesture recognition rates of
greater than 90 % from different distances.
Extending the solely gesture based solutions,
Zhang et al. present an approach that optionally al-
lows control of a drone using a stationary Kinect cam-
era eye tracking and voice commands. (Zhang et al.,
2019b).
Asides, the OpenPose framework presented by
Cao et al. (Cao et al., 2021) is oftentimes used to
perform single- or multi-person 2D pose estimation
and derive actions for mobile robots or drones from
the provided skeleton model. Using this framework
and the YOLO object detection system, Medeiros et
al. (Medeiros et al., 2020) demonstrate, that an UA
can be sent to different target objects by pointing ges-
tures. Cai et al. (Cai et al., 2019) combine Open-
Pose with a Support Vector Machine, to perform ro-
bust gesture estimation and drone control based on the
distance between the identified joints of the skeleton
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
832

model. Instead of a SVM Liu and Szir
´
anyi (Liu and
Szir
´
anyi, 2021) use a deep neuronal network to iden-
tify gestures. However, they do not use the identified
gestures to control the UA.
Besides the listed approaches, that are able to dis-
tinguish between several individual gestures, Monaj-
jemi et al. (Monajjemi et al., 2016), present a recog-
nition of persons based on arm waving gestures. They
propose a periodic waving gesture detection algo-
rithm in (Monajjemi et al., 2015) which is then used
to attract the UA’s attention and to communicate with
the UA using simple waving gestures.
According to the previous literature review, the
existing approaches focus primarily on the exclusive
manual control of robots. Additionally, the sensor
system is oftentimes not attached to the UA. Thus,
motion blur does not affect the image quality and sub-
sequently the gesture recognition. Further, many of
those approaches are not suited for UA applications
in large areas since in such scenarios UA and persons
can meet on the fly, consequently requiring the need
of instant human-UA interaction.
We present an approach in which the UA continu-
ously captures its environment during an autonomous
mission, detects persons and adapts its flight be-
haviour according to the gestures of the detected per-
sons. Thus, extending to the state of the art, persons
in the environment of the UA are given the possibil-
ity to influence the flight behaviour according to their
subjective perception of danger. For this purpose,
a human-UA interaction strategy is proposed and a
novel approach for gesture recognition is developed,
whose performance is on the level of the algorithms
presented in the related work. The gestures are se-
lected in such a way that they are on the one hand
easy to understand and perform for persons and on
the other hand robustly and with high accuracy recog-
nizable to our developed algorithm.
3 METHODOLOGY
As described in the introduction, the goal of our re-
search is to enable an UA to detect and localize per-
sons in its working environment and subsequently
adapt its flight behaviour based on recognized ges-
tures. This allows the UA to stop the current flight
mission as soon as a person has been detected and to
continue only after explicit clearance. Furthermore,
the UA can be requested to land or perform a suitable
evasive manoeuvre by means of additional gestures.
In the following, the general system architecture and
the gesture recognition approach are presented in de-
tail. Afterwards, additional information on the imple-
mentation and the used software and hardware com-
ponents are provided.
3.1 System Architecture
To achieve the objectives described above, we pro-
pose a methodology as presented in Figure 1 (left).
Thereby, the autonomous UA is equipped with an
RGB-D camera, which captures the spatial area in the
direction of flight. Based on the individual colour im-
ages, persons are recognized and the associated skele-
ton model is computed. Using the skeleton model, the
gestures performed by the recognized persons are cal-
culated and the associated flight instructions are trans-
mitted to the autopilot.
As shown in Figure 1 (right), the overall system
architecture is divided into two main components.
First, the colour images provided by the camera are
processed directly on the on-board computer of the
UA to detect persons ahead of the UA. The process-
ing is done on-board, to ensure a detection of per-
sons even when the communication with the ground
control station (GCS) is interrupted. When a per-
son is detected, an appropriate stop signal is sent to
the autopilot, which is responsible for the automated
execution of automated flight missions. The autopi-
lot then pauses the current mission and prompts the
UA to hover in place at the current position and wait
for further instructions. To be able to detect persons
within an appropriate amount of time even with lim-
ited on-board calculation power, the YOLOv4 resp.
Tiny-Yolov4 (Bochkovskiy et al., 2020) real-time ob-
ject detection system is used for this task.
Additionally, the colour and depth data are com-
pressed and sent wirelessly to the GCS for further pro-
cessing. In the first step, the OpenPose framework
(Cao et al., 2021) is used to determine the skeleton
model of the detected persons. OpenPose is a convo-
lutional neural network (CNN) based framework that
requires a colour image as input and can determine a
skeleton model with up to 25 body points of all de-
tected persons in the given image. Using the proce-
dure described in the following section 3.2, the re-
sulting skeleton points are used to check whether one
or more persons gesture in a predefined way.
If more than one person is detected in the image,
the gestures are distance-filtered using the provided
depth information. This ensures that only the com-
mand associated with the gesture of the person closest
to the UA is forwarded to the auto pilot. The excep-
tion is the request for a landing, which is forwarded
regardless of the distance. A detailed list of the de-
fined gestures and associated commands is given in
the following section.
Human Detection and Gesture Recognition for the Navigation of Unmanned Aircraft
833
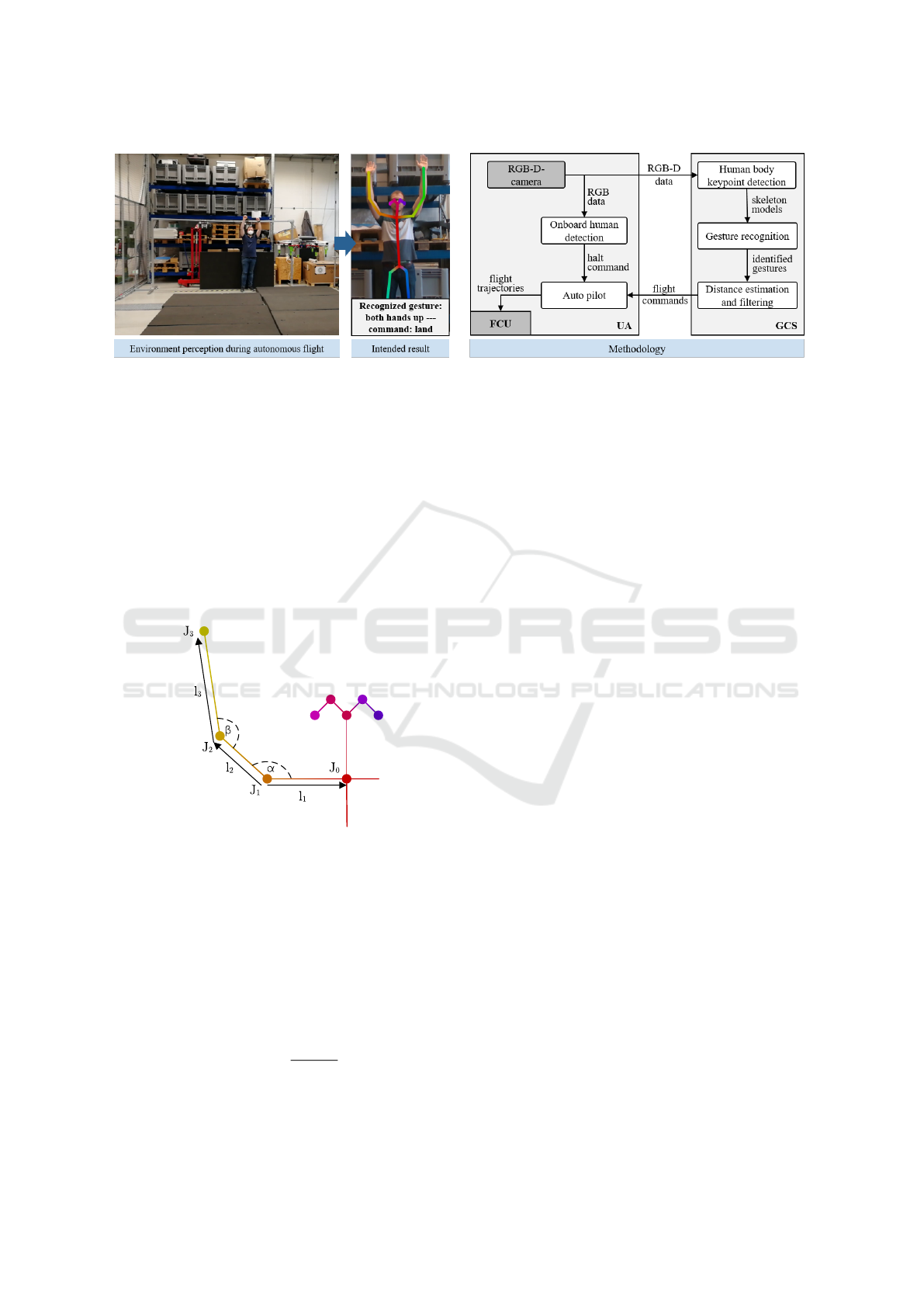
Figure 1: Left: Visualization of an autonomous UA, equipped with the proposed system. The UA recognizes the person and
the performed gestures and conducts the associated command. Right: Architecture of the proposed framework.
3.2 Gesture Recognition and Filtering
The recognition of the individual gestures is based
on the geometric relationships between the provided
skeleton points. To distinguish different gestures, two
angles α and β are introduced. Thereby α represents
the posture of the shoulder joint and β the posture of
the elbow joint. Figure 2 shows the relationship of the
angles and limbs used for the recognition of a gesture
performed with the right arm. Gestures performed
with the left arm are defined accordingly.
Figure 2: Schematic representation of the calculation of the
parameters with which a gesture is detected.
Starting from the recognized joint points J
n
, the
associated position vectors are calculated using the
coordinates of the individual joints provided by Open-
Pose. These position vectors are then used to compute
the direction vectors
~
l
n
, each representing a limb. The
subsequent calculation of the angles is exemplified in
the following equations for the angle α, which is cal-
culated by
α = arccos
~
l
1
◦
~
l
2
|
~
l
1
| · |
~
l
2
|
(1)
with
~
l
1
=
~
j
0
−
~
j
1
=
# »
OJ
0
−
# »
OJ
1
J
n
∈ R
3
(2)
~
l
2
=
~
j
2
−
~
j
1
=
# »
OJ
2
−
# »
OJ
1
J
n
∈ R
3
(3)
where
# »
OJ
n
is the position vector of the respective
joint. The angle β is calculated accordingly. Based
on the two angles, the gestures given in Table 1 can
be distinguished. An unique identifier that will also
be used within the evaluation in Section 4 names ev-
ery gesture.
The identifier lar (left arm raised) indicates a raise
of the left arm, las (left arm sideways) a laterally
stretched left arm. The same gestures can be per-
formed also with the right arm (rar, ras) or both arms
(bar, bas). If no person is present or no gesture per-
formed, the image is identified as ng (no gesture). Ta-
ble 1 provides the angle ranges used to define the dis-
tinct gestures and the flight command associated with
each gesture. Thereby, angles that apply to positions
of the right arm are denoted with index r, positions of
the left arm with the index l. A robust recognition of
the individual gestures is ensured by choosing suffi-
ciently large angle ranges and clear distance between
the angle ranges of two different gestures. Multiple
evaluations, both within the simulation and the real-
world environment, were performed to optimize the
angle ranges and obtain values that allow a reliable
detection of the gestures independently of the body
height of the performing person.
As mentioned, if more than one person perform-
ing a valid gesture is recognized, only the command
indicated by the gesture of the person closest to the
UA is performed. Therefore, the three-dimensional
position of each skeleton point is calculated using the
provided image coordinates, the depth image and the
intrinsic camera parameters. The distance between
the person and the UA is then calculated as the mean
value of the distance of the individual skeleton points
and used to filter the gestures.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
834

Table 1: Unique identifier, ranges of the corresponding joint
angles and associated flight command for the defined ges-
tures.
identifier angles command
lar 80
◦
< α
l
< 160
◦
,
125
◦
< β
l
< 190
◦
Descend 0.5 m
las 155
◦
< α
l
< 190
◦
,
155
◦
< β
l
< 190
◦
Fly 1 m left
rar 80
◦
< α
r
< 160
◦
,
125
◦
< β
r
< 190
◦
Ascend 0.5 m
ras 155
◦
< α
r
< 190
◦
,
155
◦
< β
r
< 190
◦
Fly 1 m right
bar 80
◦
< α
l/r
< 155
◦
,
115
◦
< β
l/r
< 190
◦
,
Land
bas 155
◦
< α
l/r
< 190
◦
,
155
◦
< β
l/r
< 190
◦
Continue
4 EVALUATION
The following evaluation of the presented methodol-
ogy is based on a simulation as well as on real world
flight tests.
Within the simulation, a virtual person is placed in
a suitable environment and the individual gestures are
generated by corresponding animation of the virtual
character. A virtual RGB-D camera with a resolution
of 640x480 captures the environment as well as the
movements and gestures of the person.
For the real world flight tests a custom-built
hexarotor system is used, which contains a Pixracer
flight control unit running the PX firmware v1.12.2.
An Intel RealSense D435 camera is used to capture
RGB-D images of the environment with a resolution
of 640x480 for both colour and depth images.
For example, either a LattePanda Alpha 864s or
an NVIDIA Jetson Xavier NX can be used as the
on-board computer on the UA. The on-board per-
son detection using the Jetson in conjunction with the
YOLOv4 or TinyYolo CNN will not be evaluated fur-
ther, as numerous analyses on the achievable accuracy
and performance of those CNNs on mobile hardware
already exist. The following results were obtained us-
ing the LattePanda Alpha 864s.
The overall software architecture is implemented
using the Robot Operating System (ROS) and a cus-
tom ROS wrapper for the OpenPose framework. For
evaluation, the camera data is transmitted from the
UA to a GCS via WLAN. After the skeleton model is
determined using OpenPose, the joint points are trans-
mitted to an additional ROS node, where the determi-
nation of the gestures and the filtering is performed.
Finally, the flight commands associated with the ges-
tures are transmitted back to the navigation and con-
trol framework running on the UA. A desktop PC with
an Intel Xeon W-1390P and a NVIDIA RTX Quadro
6000 GPU is used as GCS for recognizing the persons
and gestures.
For the simulation-based evaluation the data pro-
cessing procedure is analogous. The simulation of the
image data required for gesture recognition is imple-
mented using the Unity game engine, the simulation
of the UA and the flight movements is running simul-
taneously in Gazebo. However, data transmission via
WLAN is omitted in the simulation. Thus, the sim-
ulation and calculation are carried out exclusively on
the ground station.
To benchmark the performance of the proposed
gesture recognition approach, we evaluate the classi-
fier performance using a confusion matrix for multi-
class classification and determine the accuracy A and
the macro average of the sensitivity S
macro
, the preci-
sion P
macro
and the F1-score F1
macro
.
Therefore, for each class c, which represents a dis-
tinct gesture, the true positives (T P), the false posi-
tives (FP), the true negatives (T N) and the false neg-
atives (FN) are calculated. Based on those values, the
evaluation metrices A, S
macro
, P
macro
and F1
macro
are
calculated as follows, whereby N indicates the total
number of classes c.
A =
∑
N
i=0
T P
i
+ T N
i
∑
N
i=0
T P
i
+ T N
i
+ FP
i
+ FN
i
(4)
P
macro
=
1
N
N
∑
i=0
T P
i
T P
i
+ FP
i
(5)
S
macro
=
1
N
N
∑
i=0
T P
i
T P
i
+ FN
i
(6)
F1
macro
=
1
N
N
∑
i=0
2T P
i
2T P
i
+ FN
i
+ FP
i
(7)
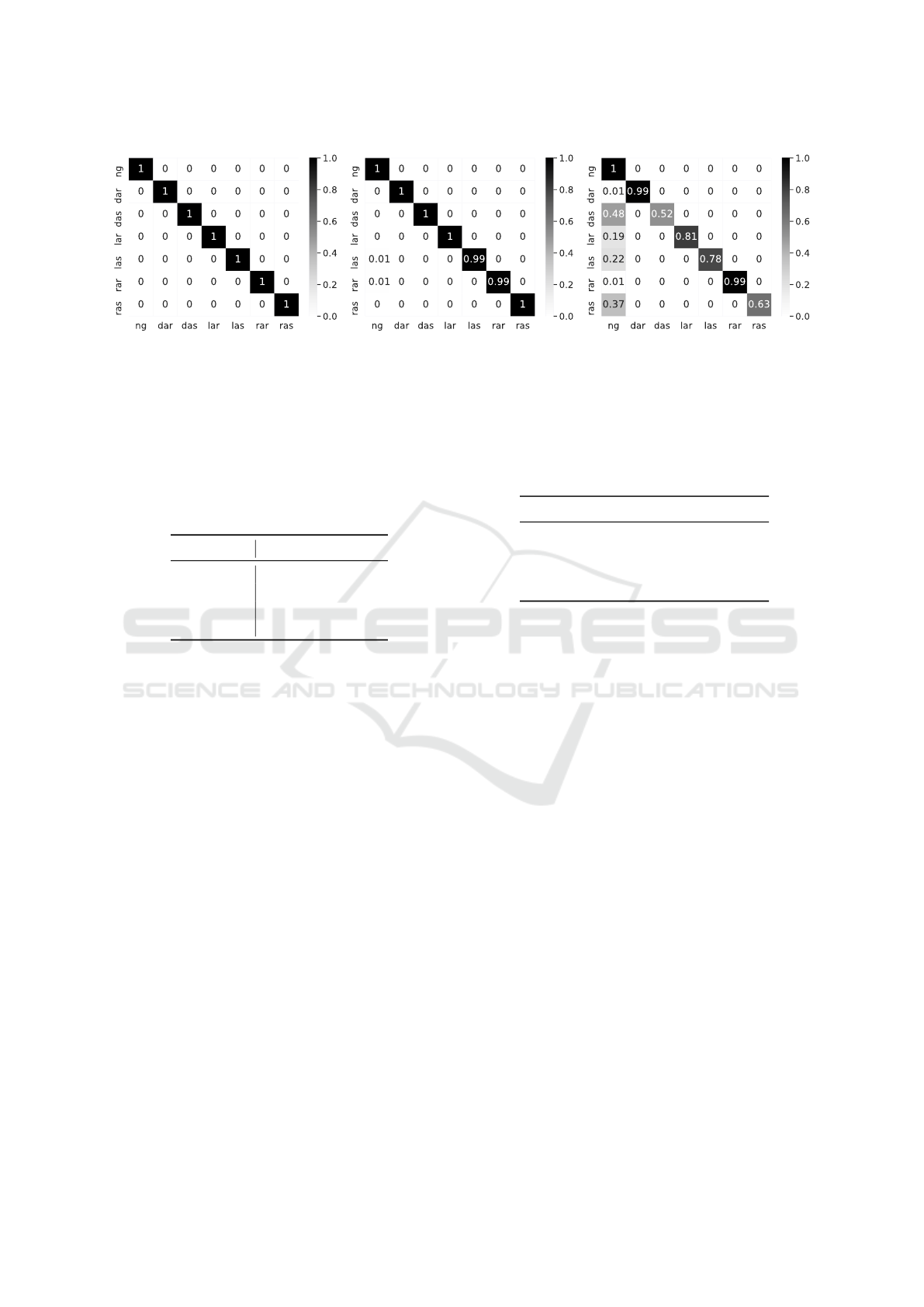
4.1 Simulation
To evaluate the proposed gesture recognition ap-
proach in a simulated environment, the Game Engine
Unity is used. A suitable human model is placed in
a simulated environment and captured by a virtual
camera. The camera is positioned 1.5 m above the
floor and in a distance of 3 m, 6 m and 9 m to the per-
son. The simulated person performs the previously
defined gestures and the results of the gesture recogni-
tion based on the virtual camera images (cf. Figure 4)
are evaluated. The confusion matrices for the results
of the gesture recognition from the three distances are
depicted in Figure 3 a) to c).
Human Detection and Gesture Recognition for the Navigation of Unmanned Aircraft
835

(a) 3 m distance (b) 6 m distance (c) 9 m distance
Figure 3: Normalized confusion matrix for the results of the gesture recognition and classification during the simulation in
Unity. For each gesture and distance 90 images have been evaluated, resulting in a total of seven classes and 630 images per
distance.
Figure 4: Camera image captured in the simulated environ-
ment.
It can be seen, that the gestures are correctly rec-
ognized in the vast majority of the images. In a few
images where no person is present, different objects
are falsely interpreted as humans by the OpenPose
framework and thus a skeleton model is calculated al-
though no person is contained in the image. Due to
the joint angles in those false-positive skeleton mod-
els, the gesture recognition algorithm recognises ei-
ther a das or las gesture.
As the simulated persons do not move and no im-
age noise is simulated, the values of the confusion ma-
trix and the corresponding values of A, S
macro
, P
macro
and F1
macro
do not decrease with distance. The result-
ing values of the individual parameters are provided
in Table 2.
4.2 Real-world Experiments
The evaluation of the gesture recognition during real
world flight tests is analogous to the simulation. The
UA hovers at an altitude of 1.5 m to 2.0 m above the
floor and captures a person form a distance of 3 m, 6 m
and 9 m. Figure 1 (left) shows an exemplary camera
image captured with a distance of 9 m between the
Table 2: Performance measures of the proposed gesture
recognition approach when applied to simulation-generated
images.
Distance 3 m 6 m 9 m
Precision 1.0 1.0 0.99
Sensitivity 1.0 1.0 0.99
Accuracy 1.0 1.0 0.99
F1-Value 1.0 1.0 0.99
person and the UA. The confusion matrices for the
results of the gesture recognition from the three dis-
tances are depicted in Figure 5 a) to c). It can be seen,
that up to a distance of 6 m the proposed algorithm is
capable to identify the vast majority of gestures cor-
rectly. In Figure 5 b), only 95 percent of the rar ges-
tures were detected correctly, because OpenPose did
not provide a valid skeleton model for the remaining
5 % of the images.
Contrary to the simulation, with increasing dis-
tance between the UA and the person, the percent-
age of true positive and true negative recognitions de-
creases. This can be traced back to noise occurring
in the real world images, vibrations affecting the im-
age stability and the increased movement of the UA
during hover state, which can reach a peak-to-peak
amplitude of 0.2 m. Those factors prevent a detec-
tion of the complete skeleton model when the distance
between the UA and the person becomes too large.
Moreover, the joint angles of a real person do not stay
constant like in the simulation but fluctuate a bit, thus
decreasing the accuracy further.
In consequence, OpenPose does provide less ac-
curate skeleton models, when the distance between
the UA and the persons reached 9 m. As it can be seen
in Figure 5 c), when the skeleton model is faulty or
missing, our algorithm can not detect a valid gesture
or estimates a wrong gesture. Thus, also the values of
A, S
macro
, P
macro
and F1
macro
decrease with increas-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
836
(a) 3 m distance (b) 6 m distance (c) 9 m distance
Figure 5: Normalized confusion matrix for the results of the gesture recognition and classification during the real world flight
test. For each gesture and distance 90 images have been evaluated, resulting in a total of seven classes and 630 images per
distance.
ing distance. The resulting values of the individual
parameters are provided in Table 3.
Table 3: Performance measures of the proposed gesture
recognition approach when applied to real world images
captured by the on-board camera of an UA.
Distance 3 m 6 m 9 m
Precision 1.0 0.99 0.82
Sensitivity 1.0 0.99 0.92
Accuracy 1.0 0.99 0.82
F1-Value 1.0 0.99 0.83
During the real-world flight experiments, also the
response time of the GCS achievable with the pre-
sented approach for gesture recognition and the uti-
lized hardware is evaluated. This analysis is based
on the time interval between the receipt of a camera
image on the GCS and the dispatch of a correspond-
ing flight command to the to the UA. As stated above,
we did not evaluate the reaction time of YOLOv4 on
mobile hardware, as this has already been subject of
various studies.
First, we determine the interval T
OP
, which indi-
cates the computing time used by OpenPose to cal-
culate the skeleton model. Second, we calculate the
interval T
total
, which additionally includes the com-
putation time of the previously presented algorithm
for gesture recognition and for deriving the associated
flight command. The resulting intervals are provided
in Table 4. It can be seen, that the interval T
total
has
an average value of 47.32 ms, indicating that the ges-
ture recognition can be performed at an update rate
of around 20 Hz with the used hardware. However, it
must be taken into account that the evaluation is not
performed directly on the UA, and thus the total time
must be increased by the transmission times of the ra-
dio network used.
Table 4: Time interval T
OP
required to determine the skele-
ton model and interval T
total
indicating the overall time re-
quired to perceive a person, recognize a gesture and transmit
a corresponding flight command to the UA
Interval (ms) T
OP
T
total
Minimum 3,00 16,09
Maximum 35,27 101,38
Mean 19,59 47,32
Standard deviation 8,75 16,70
5 CONCLUSIONS
Within this paper, we have presented an approach to
enable autonomous UA to perceive and locate persons
within their flight path and to perform flight manoeu-
vres indicated by the perceived person using differ-
ent gestures. The proposed methodology for gesture
recognition is based on a skeleton model of the de-
tected persons and uses the angles between individual
limbs to distinguish different gestures. The evalua-
tion of the proposed approach is conducted within a
simulation and based on real word flight experiments
and reveals an average accuracy of 0.94 for gestures
performed in a distance between 3 m and 9 m to the
UA.
Within future research, we will focus on increas-
ing the robustness of the gesture recognition, espe-
cially when the UA is still further away from a person
or the person is partially concealed. Additionally, we
will add a 3D-segmentation pipeline as presented in
(Kedilioglu et al., 2021) to determine the point cloud
corresponding to the perceived persons and calculate
a bounding box enclosing each person. An additional
spatio-temporal tracking of each person in combina-
tion with a suitable path-planning approach will allow
the UA to perform more suitable evasion manoeuvres
without endangering the persons.
Human Detection and Gesture Recognition for the Navigation of Unmanned Aircraft
837

REFERENCES
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion.
Cai, C., Yang, S., Yan, P., Tian, J., Du, L., and Yang,
X. (2019). Real-time human-posture recognition for
human-drone interaction using monocular vision. In
Yu, H., Liu, J., Liu, L., Ju, Z., Liu, Y., and Zhou, D.,
editors, Intelligent Robotics and Applications, pages
203–216, Cham. Springer International Publishing.
Cao, Z., Hidalgo, G., Simon, T., Wei, S.-E., and Sheikh,
Y. (2021). Openpose: Realtime multi-person 2d pose
estimation using part affinity fields. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
43(1):172–186.
Chen, Y., Tian, Y., and He, M. (2020). Monocular hu-
man pose estimation: A survey of deep learning-based
methods. Computer Vision and Image Understanding,
192:102897.
Eißfeldt, H., Vogelpohl, V., Stolz, M., Papenfuß, A., Biella,
M., Belz, J., and K
¨
ugler, D. (2020). The acceptance of
civil drones in germany. CEAS Aeronautical Journal,
11.
Kassab, M. A., Ahmed, M., Maher, A., and Zhang,
B. (2020). Real-time human-uav interaction: New
dataset and two novel gesture-based interacting sys-
tems. IEEE Access, 8:195030–195045.
Kedilioglu, O., Lieret, M., Schottenhamml, J., W
¨
urfl, T.,
Blank, A., Maier, A., and Franke, J. (2021). Rgb-d-
based human detection and segmentation for mobile
robot navigation in industrial environments. In VISI-
GRAPP (4: VISAPP), pages 219–226.
Koch, J., Wettach, J., Bloch, E., and Berns, K. (2007).
Indoor localisation of humans, objects, and mobile
robots with rfid infrastructure. In 7th International
Conference on Hybrid Intelligent Systems (HIS 2007),
pages 271–276.
Le, T.-L., Nguyen, M.-Q., and Nguyen, T.-T.-M. (2013).
Human posture recognition using human skeleton pro-
vided by kinect. In 2013 International Conference
on Computing, Management and Telecommunications
(ComManTel), pages 340–345.
Lidynia C., Philipsen R., Z. M. (2017). Droning on
about drones—acceptance of and perceived barriers to
drones in civil usage contexts. Savage-Knepshield P.,
Chen J. (eds) Advances in Human Factors in Robots
and Unmanned Systems. Advances in Intelligent Sys-
tems and Computing, 499.
Liu, C. and Szir
´
anyi, T. (2021). Real-time human detec-
tion and gesture recognition for on-board uav rescue.
Sensors, 21(6).
Maher, A., Li, C., Hu, H., and Zhang, B. (2017). Realtime
human-uav interaction using deep learning. In Zhou,
J., Wang, Y., Sun, Z., Xu, Y., Shen, L., Feng, J., Shan,
S., Qiao, Y., Guo, Z., and Yu, S., editors, Biometric
Recognition, pages 511–519, Cham. Springer Interna-
tional Publishing.
Medeiros, A. C. S., Ratsamee, P., Uranishi, Y., Mashita,
T., and Takemura, H. (2020). Human-drone interac-
tion: Using pointing gesture to define a target object.
In Kurosu, M., editor, Human-Computer Interaction.
Multimodal and Natural Interaction, pages 688–705,
Cham. Springer International Publishing.
Monajjemi, M., Bruce, J., Sadat, S. A., Wawerla, J., and
Vaughan, R. (2015). Uav, do you see me? establishing
mutual attention between an uninstrumented human
and an outdoor uav in flight. In 2015 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS), pages 3614–3620.
Monajjemi, M., Mohaimenianpour, S., and Vaughan, R.
(2016). Uav, come to me: End-to-end, multi-scale sit-
uated hri with an uninstrumented human and a distant
uav. In 2016 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 4410–
4417.
Mosberger, R. and Andreasson, H. (2013). An inexpen-
sive monocular vision system for tracking humans in
industrial environments. In 2013 IEEE International
Conference on Robotics and Automation, pages 5850–
5857.
Pounds, P. E. I. and Deer, W. (2018). The safety rotor—an
electromechanical rotor safety system for drones.
IEEE Robotics and Automation Letters, 3(3):2561–
2568.
Sanna, A., Lamberti, F., Paravati, G., Ramirez, E. H., and
Manuri, F. (2012). A kinect-based natural interface for
quadrotor control. In Intelligent Technologies for In-
teractive Entertainment. 4th International ICST Con-
ference, INTETAIN 2011, Genova, Italy, May 25-27,
2011, Revised Selected Papers.
Tellaeche, A., Kildal, J., and Maurtua, I. (2018). A flexi-
ble system for gesture based human-robot interaction.
Procedia CIRP, 72:57–62. 51st CIRP Conference on
Manufacturing Systems.
Yu, Y., Wang, X., Zhong, Z., and Zhang, Y. (2017). Ros-
based uav control using hand gesture recognition. In
2017 29th Chinese Control And Decision Conference
(CCDC), pages 6795–6799.
Zhang, J., Peng, L., Feng, W., Ju, Z., and Liu, H. (2019a).
Human-agv interaction: Real-time gesture detection
using deep learning. In Yu, H., Liu, J., Liu, L., Ju,
Z., Liu, Y., and Zhou, D., editors, Intelligent Robotics
and Applications, pages 231–242, Cham. Springer In-
ternational Publishing.
Zhang, S., Liu, X., Yu, J., Zhang, L., and Zhou, X.
(2019b). Research on multi-modal interactive control
for quadrotor uav. In 2019 IEEE 16th International
Conference on Networking, Sensing and Control (IC-
NSC), pages 329–334.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
838
