
Video-based Behavior Understanding of Children for Objective
Diagnosis of Autism
Abid Ali
1,2
, Farhood Negin
1
, Susanne Th
¨
ummler
1,2
and Francois Bremond
1,2
1
Universit
´
e Cote d’Azur, France
2
INRIA, France
Keywords:
Autism, Autism-Spectrum-Disorder, Action-recognition, Computer-vision, 3d-Convolutional-neural-network.
Abstract:
One of the major diagnostic criteria for Autism Spectrum Disorder (ASD) is the recognition of stereotyped
behaviors. However, it primarily relies on parental interviews and clinical observations, which result in a
prolonged diagnosis cycle preventing ASD children from timely treatment. To help clinicians speed up the
diagnosis process, we propose a computer-vision-based solution. First, we collected and annotated a novel
dataset for action recognition tasks in videos of children with ASD in an uncontrolled environment. Second,
we propose a multi-modality fusion network based on 3D CNNs. In the first stage of our method, we pre-
process the RGB videos to get the ROI (child) using Yolov5 and DeepSORT algorithms. For optical flow
extraction, we use the RAFT algorithm. In the second stage, we perform extensive experiments on different
deep learning frameworks to propose a baseline. In the last stage, a multi-modality-based late fusion network
is proposed to classify and evaluate performance of ASD children. The results revealed that the multi-modality
fusion network achieves the best accuracy as compared to other methods. The baseline results also demon-
strate the potential of an action-recognition-based system to assist clinicians in a reliable, accurate, and timely
diagnosis of ASD disorder.
1 INTRODUCTION
Autism Spectrum Disorder (ASD) represents a het-
erogeneous set of neurobiological disorders charac-
terized by defects in social communication and re-
ciprocal interactions, repetitive, as well as stereotypic
behaviors. ASD onsets in early childhood and have
a substantial influence on the lives of children and
their families without having a definite treatment. Al-
though researchers associate ASD to various factors
such as genetic, biological, and environmental ef-
fects, nevertheless, they are unknown in many pa-
tients (O’Roak and State, 2008). Moreover, the preva-
lence of ASD increases. According to World Health
Organization (WHO), 1 out of 160 children has an
ASD (WHO, 2021). This number is the average of
various studies where the reported prevalence varies
significantly across them. As reported by the Autism
and Developmental Disabilities Monitoring (ADDM)
in 2016 the prevalence of autism spectrum disorder
is now one in 54 children (Knopf, 2020). Also, the
prevalence in middle and low-income countries is un-
known.
The common agreement in the literature suggests
that early diagnosis, accompanied by continuous in-
tervention, is a key factor to maximize therapeutic re-
sults. Therefore, exploiting the brain’s neuroplasticity
at early childhood, timely diagnosis of ASD and rec-
ommending intensive behavioral treatments can result
in better long-term outcomes. However, ASD diag-
nosis still continues to be a complicated challenge.
The significant parameters include expert knowledge
and particular diagnostic tools based on decoding
child behavior, parent interviews, long-term follow-
ups and inspection of symptoms, and manual analysis.
These assessments are time-consuming and clinically
require arduous processes. Additionally, human as-
sessments are subjective and inconsistent. Early stud-
ies suggested that abnormalities in social interactions,
communication, and presenting repetitive behaviors
could be the primary indicatives of ASD (Kanner
et al., 1943). However, some of the autism-related
communicative and behavioral symptoms are not ex-
clusive to autism, which makes getting an early di-
agnosis difficult (Lewis and Bodfish, 1998). Proper
treatment requires timely diagnosis though, the accu-
rate diagnoses were generally made not sooner than
Ali, A., Negin, F., Thümmler, S. and Bremond, F.
Video-based Behavior Understanding of Children for Objective Diagnosis of Autism.
DOI: 10.5220/0010839200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
475-484
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
475

age 5, which is already late for treatment (Hashemi
et al., 2012).
Computer vision and computational behavior
modeling are concerned with machine analysis and
understanding human behavior. They help to develop
analytic techniques to automate diagnostic assess-
ments. These approaches could facilitate the quick
analysis of vast amounts of naturally recorded videos
in addition to supporting the diagnosis process by pro-
viding accurate and objective measurements. Video-
based behavior understanding could enable the im-
provement of current assessment protocols and the
discovery of new behavioral markers. Specifically,
action recognition techniques can model the motor
patterns of children and spot the presence of typi-
cal behavior related to gait, posture and repetitive
motions (Marinoiu et al., 2018; Zhang et al., 2021;
de Belen et al., 2020; Pandey et al., 2020). There is
no specific test to spot these atypical patterns and clin-
icians take a holistic approach during their sessions
with children to spot those patterns in their behaviors.
Therefore, a video-based action recognition system is
beneficial in carrying out surveillance of children in
the clinical sessions and detect abnormal behavioral
patterns. From an action recognition point of view,
such analysis introduces a number of challenges that
usually do not arise in other action recognition scenar-
ios. For example, repetitive behavior such as stereo-
typical self-stimulatory behavior which is considered
as a significant clue of this disorder does not comprise
any rule or constraint that are common in regular ac-
tion datasets. Moreover, to have a reliable assessment
of the subjects, the actions, communication, and in-
teractions need to be captured naturally. However, in
clinical settings, children consider clinicians as an au-
thority and do not act in an unaffected manner (Huerta
and Lord, 2012).
In order to capture all subtleties associated with
the diagnosis of ASD and to explicitly model a
child’s behavior in a natural setting, collecting stan-
dard datasets is indispensable. Currently, there is a
severe lack of data in this domain, which hinders rapid
progress. Most of the available public datasets for di-
agnosis of ASD centered on emotional involvement,
facial expression and eye movement (Wang et al.,
2015b; Tanaka and Sung, 2016) and less focused on
motion perception and action recognition aspects (Ra-
jagopalan et al., 2013; Negin et al., 2021). To study
subjects’ behavior from videos in an uncontrolled nat-
ural environment we have collected a novel dataset
from children attending the clinical center and will-
ing to take part in our studies.
Considering the motivation and above-mentioned
challenges, we attempt to propose a computer-
assisted solution for automatic analysis of Autism
Spectrum Disorder (ASD) behavior using action
recognition approaches. The contributions are as fol-
lows:
• We propose a new framework based on multi-
modality fusion for recognizing autistic behaviors
in videos. The method is based on I3D architec-
ture pre-trained on a large-scale action recognition
dataset and fine-tuned on a small dataset of stereo-
typic actions. We study both the RGB and opti-
cal flow modalities for their contribution in rec-
ognizing ASD actions. Later on, we fuse the two
modalities to achieve a higher accuracy.
• To evaluate our proposed methodology, we at-
tempt to collect and annotate a novel Autism
dataset, Activis, in an uncontrolled environment
with the help of clinicians.
• We also compare different action recognition net-
works and produce baseline results for the col-
lected dataset. The multi-modality fusion network
achieved higher accuracy as compared to the rest
of methods.
In the rest of the paper, the state-of-the-art meth-
ods are discussed in Section 1.1. In section 2 we
propose our method and the necessary pre-processing
steps, followed by details of the dataset and experi-
ments conducted with results in Section 3. Finally,
we conclude the paper in Section 4
1.1 Related Work
To diagnose ASD, psychologists designed a standard
semi-structured test called Autism Diagnostic Obser-
vation Schedule (ADOS). ADOS’s objective is to es-
timate the level of social deficiency in children which
takes up to two hours (four 30 minutes sessions) and
requires expert skills to conduct (Lord et al., 2000).
The Long time of the exam and its requirement for
expert knowledge prevent its widespread application
for early-stage screenings. In recent years researchers
have developed machine learning and computer vi-
sion algorithms to automatically identify ASD be-
haviors based on video recordings in both controlled
and uncontrolled settings (Chen and Zhao, 2019; Li
et al., 2018; Li et al., 2019; Zunino et al., 2018; Li
et al., 2020). Some studies use subjects’ gaze pat-
terns (Wang et al., 2015b; Jiang and Zhao, 2017), in-
terpretation of facial expressions and facial emotions
(Liu et al., 2016; Tanaka and Sung, 2016), and ges-
tures (Anzulewicz et al., 2016) to diagnose ASD. In
(Wang et al., 2015b) the authors classify ASD pa-
tients based on their gaze patterns using a support
vector machines (SVM) classifier. As ASD patients
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
476

have difficulty in recognizing faces and facial expres-
sions, (Liu et al., 2016) investigates patterns of scan-
ning facial markers by the subjects to identify those
with potential ASD. (Anzulewicz et al., 2016) em-
ployed a touch-sensitive tablet with an embedded mo-
tion sensor to capture kinematic gestures performed
by children while playing games. They were able to
identify ASD with 93% accuracy among the partici-
pants. Most of these methods disregard the useful per-
ceptual, temporal, and motion information from body
parts used in action recognition techniques. Despite
being effective in several scenarios, they can fail in
many uncontrolled settings especially when the face
is not visible or the quality of the captured video is
not high enough to interpret the expressions.
The behavior of ASD children can be charac-
terized by their defective interpersonal communica-
tion. A child with ASD may not respond to some-
one calling his/her name in the form of eye contact
or head orientation (Liu et al., 2017). (Rehg et al.,
2013) addresses the challenges related to the commu-
nicative activities through parsing of subject’s inter-
actions into their atomic components. Therefore, it
is able to rate the level of social dyadic interactions
and evaluate the quality of a child’s engagement. A
public dataset called Multi-Modal Dyadic Behavior
(MMDB) is recorded and released within the context
of this study. (Marinoiu et al., 2018) proposes a set-
ting for robot-assisted therapy of ASD children. In
every session, the subject is accompanied by a robot
while performing physical activities. Their multi-
modal dataset (DE-ENIGMA) consists of RGB and
depth recordings which are utilized to evaluate actions
as well as emotional expressions of children.
Action recognition methods can utilize appear-
ance and motion information as well as articulated
pose structures to model human behavior more accu-
rately. Recently, various studies targeted the diagno-
sis of ASD by analyzing behavioral cues through ac-
tion detection (Tian et al., 2019; Negin et al., 2021).
They are mainly focused on detecting repetitive be-
haviors (e.g. stereotype, self-injurious, ritualistic be-
haviors) that are considered as an important indicative
of ASD (Edition et al., 2013). O-GAD is a temporal
convolutional network (Tian et al., 2019) that directly
predicts ASD from arbitrarily long videos by detect-
ing atypical repetitive behaviors. Potentially, action
recognition and detection techniques can be utilized
for ASD video content analysis. Two-stream net-
works (Simonyan and Zisserman, 2014; Wang et al.,
2015a) apply a 2D convolutional operation on indi-
vidual frames and optical flow field to learn spatial
and temporal features. To learn spatiotemporal fea-
tures directly from raw video data, the C3D network
(Tran et al., 2015) employs 3D convolution. Recur-
rent Neural Networks (RNNs) have been widely used
for temporal action detection in untrimmed videos
(Buch et al., 2017; Ma et al., 2016). However, RNNs
have difficulty detecting long-range temporal depen-
dencies. Temporal Convolutional Network (TCN)
(Lea et al., 2016) proposed as an alternative to resolve
this problem and perform temporal action segmenta-
tion. Instead, our framework uses inflated inception
modules to extract spatial and temporal features from
RGB and flow information and fuses them to perform
action recognition.
2 METHODOLOGY
In this section we discuss the developed deep learn-
ing based methods for the evaluation of action recog-
nition tasks on our collected dataset. These meth-
ods leverage different modalities to produce baseline
results for further research in the future. Based on
the modality, these methods are generally defined as
RGB-based, or Flow-based methods. We are more fo-
cused on deep-neural-network-based methods to nar-
row down our approach. The overall architecture of
the framework is given in Fig 1. As we will discuss
in Section 3.1, in the studied dataset, usually two or
more people are performing the actions. Therefore, it
is crucial to detect and track the target children in the
videos. The proposed methods comprise three crucial
steps (person detection, tracking and action recogni-
tion). Prior to the action recognition task, we extract
the region of interests (ROIs) from the video frames
(in our case the child). This is done by a person detec-
tion framework followed by a tracking algorithm. All
these steps are done at the preprocessing level which
we explain next.
2.1 Pre-processing
Person Detection: the videos are based on human-
human or human-object interactions. Hence, the aim
is not only to detect but to track the subjects (’child’
and ’subject’ are used interchangeably) as well. For
the first part, three different person detection algo-
rithms are fine-tuned and utilized. HOG (Zhou, 2014)
descriptor, a gradient-based object detector is applied
to detect people at each frame. the gradients are
extracted by dividing the image into 8 by 8 cells,
where the feature histograms are calculated accord-
ingly. Prior to detection the histogram gradients are
normalized. YOLOv3 (Redmon and Farhadi, 2018),
a strong end-to-end real-time object detection net-
work, is used for person detection. This network con-
Video-based Behavior Understanding of Children for Objective Diagnosis of Autism
477
Input Video Detected by
YoloV5
Tracked by DeepSORT
Cropped child
Pre-processing step
+
3D ConvNet (I3D)
FC features
RGB Input
Flow Input
Action Recognition Framework
Clapping
Arm flapping
To taste
Action classification
Training
Testing
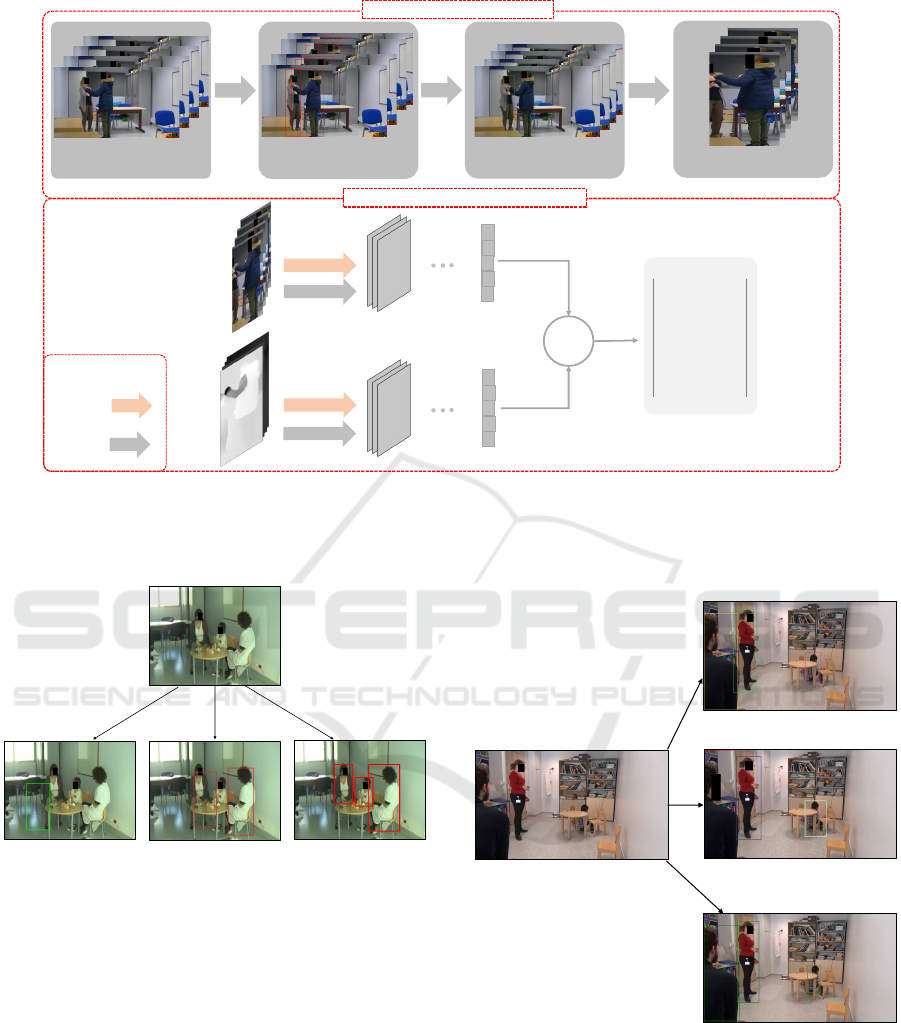
Figure 1: Action recognition pipeline based on I3D framework. The top box the necessary pre-processing required to extract
the desired subject from the whole video. The box below is framework, in which a feature vector of 4096 in a Fully Connected
(FC) layer achieved from a pre-trained I3D using RGB and flow inputs, individually. The features are concatenated at the last
layer to predict desired action.
HOG
YoloV3
YoloV5
Figure 2: Examples of person detection algorithms applied:
using HOG (Left), Yolov3 (Center), and Yolov5 (Right) de-
tectors.
sists of 3 x 3 and 1 x 1 convolutional and residual lay-
ers. It divides the image into a grid of S x S with each
grid predicting anchor boxes B (for further details in
(Redmon and Farhadi, 2018)). A model pre-trained
on COCO (Liu et al., 2017) having 80 classes is used
for our experiments.
YOLOv3 struggled at occlusion points in our
dataset making it harder for the tracking algorithm
to work properly. Therefore, experiments were car-
ried out with YOLOv5, an improved successor of
YOLOv3 with better accuracy for occluded objects,
achieving desired results as illustrated in Fig 2.
Tracking: in order to track the desired target subject
in the videos, the SORT which is an effective real-
SORT
FairMOT
DeepSORT
Figure 3: Tracking results using SORT (Top), FairMOT
(middle), and DeepSORT (bottom) algorithms.
time tracking algorithm based on Kalman filter and
Hungarian algorithm, is utilized. However, the SORT
algorithm struggles with ID switching issue. Conse-
quently, the tracking also performed with two other
strong tracking algorithms (Zhang et al., 2020; Wojke
et al., 2017). FairMOT (Zhang et al., 2020), is an an-
chor free state-of-the-art tracking and detection algo-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
478

rithm based on an encoder-decoder network to extract
high resolution features from an image.
We utilize a pre-trained model based on MOT17
(Milan et al., 2016) and CrowdHuman (Shao et al.,
2018) in our evaluations. The end results of the model
is shown in the Fig 3. The obtained results were not
good enough to be used for our action recognition
task. The reason could be evaluating the dataset on the
pre-trained model without training. We did not train
the object detector and RE-ID module of this method
specifically for our dataset due to lack of annotated
data. To avoid training process the DeepSORT (Wo-
jke et al., 2017) algorithm is employed. Deepsort
works similarly to that of SORT algorithm including
the Kalman filter for tracking the missing tracks and
the Hungarian algorithm with a deep appearance de-
scriptor to handle occlusion and view-point changes.
The DeepSORT accuracy highly rely on object detec-
tor module performance. DeepSORT while combined
with YOLOv5 pre-trained on MOT17 and COCO
datasets, separately achieved the desired results when
applied on our datasets (Fig 3).
Extraction of Region of Interest (ROI): the
recorded videos in our dataset are based on human-
human interaction, where the ASD actions only ap-
pear in the child’s actions. Therefore, after detection
and tracking, the targeted subject is cropped at each
frame using the assigned tracking ID and detected
bounding boxes. As the subjects are from different
age ranges, their body ratios varies. The cropped
bounding boxes are resized to a fixed size by keeping
height to width ratios unchanged to keep the evalua-
tions independent from the body ratios.
Optical Flow Extraction: the optical flow is ex-
tracted by utilizing the RAFT (Recurrent All Pairs
Field Transformers for Optical Flow) network (Teed
and Deng, 2020). The RAFT architecture extracts
per pixel feature using an encoder, then it generates
4D correlation volumes for all pairs of pixels from all
frames. A recurrent unit looks up the correlation vol-
umes to update the flow field, iteratively.
A pre-trained model is used to extract the optical
flow. The normalized grayscale horizontal and verti-
cal optical flow images are combined at channel di-
mension before feeding to the 3D convNets.
2.2 Two-stream Fusion Network
In this section, we discuss the deep-learning-based ar-
chitecture for ASD actions in children. We study the
effect of the RGB and flow modalities and later on,
we perform a fusion of both at different levels of the
network.
Inception-VI is used as the backbone network by
inflating all the 2D filters and pooling kernels to 3D.
Thus, a 2D square filter of N x N becomes cubic N x
N x N to include the temporal dimension.
The Inception-VI base architecture consists of a
first convolutional layer with a stride 2, then four
max-pooling layers having a stride of 2, and a 7 x 7
average-pooling layer leading to the last linear classi-
fication layer, in addition to the max-pooling layers in
the parallel Inception branches. There was no tempo-
ral pooling applied in the first two max-pooling layers
utilizing 1 x 3 x 3 kernels and stride 1 in time. While
symmetrical kernels and strides were employed in all
other max-pooling layers. The model is trained with
64-frames snippets but a whole video was used during
testing by averaging the predictions temporally.
Fusion: in our dataset, the ASD actions include
abrupt motions of the body parts. These motion cues
are more difficult to capture by RGB but plays a sig-
nificant role in analyzing such actions. Using motion
information from optical flow can help to achieve bet-
ter representations and recognition of these type of ac-
tions. Therefore, both RGB and optical flow streams
were trained and tested separately prior to fusion to
identify their contribution towards recognizing the ac-
tion successfully. Later on, we perform a fusion of
both modalities at different levels.
The early fusion variant does not fuse the raw data
but instead the RGB and optical flow modalities are
feed to the first convolution of the I3D network to ex-
tract initial features. These features from both modal-
ities are then concatenated. The rest of the network
remained unchanged obtaining a single stream archi-
tecture for both modalities.
Fusion at test time is a situation where both
modalities are trained separately. The fusion occurs
only during test time by averaging the results from
both modalities.
A late fusion scenario was adopted by extract-
ing features from the last layers of two-streams of
I3D having RGB and optical flow inputs and con-
catenating them at the last layer. An input of the size
b × 64 × c × w × h, with b being the batch size, c the
input channel, w and h are the width and height of the
each image, is provided to the model. The c should
be 3 for RGB and 2 for optical flow modality. Feature
vectors of size 4096 are extracted from the last Fully
Connected (FC) layer of both RGB and optical flow
streams, separately. These features were fused at this
point by a concatenation operation. An output equal
to the number of classes resulted for classification.
Video-based Behavior Understanding of Children for Objective Diagnosis of Autism
479

3 EXPERIMENTS
In this section, we first explain the collected dataset in
addition to the augmentation techniques we utilized to
increase size of the dataset. Next, we describe the ex-
perimental details used for model training and finally,
we report the results and ablation studies.
Figure 4: Instance frames of the vidoes in the collected
dataset. From top row to down: ”clapping”, ”arm flapping”,
”to taste”, ”jump-up”, and ”others”.
3.1 Activis Dataset
The Activis dataset consists of 60 children recorded
during child assessment sessions with presence of
clinicians at the hospital. Their age ranges from
3 - 6 years. A trained clinician assessed the child
based on communication skills, social interaction,
and their imaginative use of materials according to
the Autism Diagnostic Observation Schedule-Second
Edition (ADOS-2) tool. Each session lasts for 50
minutes, the videos were recorded in a natural en-
vironment. Each child was diagnosed with a possi-
ble Autism disorder during different ADOS activities
like anniversary, playing with bubbles, construction,
joint game etc. The untrimmed videos were labeled
by a psychologist for a possible 1) ADOS activity,
and 2) repetitive action that was a potential indica-
tion of ASD disorder. The ADOS activity-based ac-
tion is out of this paper’s scope and will be discussed
in future work. The actions in the dataset were di-
vided to five categories (388 videos): arm-flapping,
clapping, to-taste, jump-up and others (Fig 4). Each
untrimmed video was clipped to 2 - 20 seconds clips
based on the action. Blurred, distorted, and out-of-
frame videos were discarded achieving a total of 388
trimmed videos. An HD camera was used for record-
ing having 30 fps. With this conversion, there are a
total of 12.5K frames in the dataset. Some of the sub-
jects did not perform the same action, therefore, the
data is not subject-oriented and highly imbalanced.
More detailed information about the dataset is de-
scribed in Table 1.
Table 1: Detailed information about the number of videos
and frames of each action in the Activis dataset.
Action # of videosMin/max/avg framesTotal no. of frames
Clap 33 65/95/208 2447
Arm-flapping 59 58/112/198 6082
To-taste 132 73/157/388 18824
Jump-up 29 45/110/260 2270
Others 134 76/264/650 95695
3.2 SSBD Dataset
Self-Stimulatory Behaviour Dataset (SSBD) is a pub-
licly available dataset proposed in (Rajagopalan et al.,
2013). The data has been collected from different on-
line portals, such as Youtube, Vimeo, and Dailymo-
tion etc. The data consists of three distant autistic ac-
tions including Armflapping, Headbanging, and Spin-
ning. The total actual data reported in original paper
was 75 videos, in which only 66 are downloadable
due to privacy concerns of Youtube. We validate our
methods on this dataset along with our own dataset.
3.3 Data Augmentation
To increase the dataset and help the model converge
effectively, three different augmentations are intro-
duced: Horizontal flipping, up-sampling, and down-
sampling. First, the videos were flipped horizon-
tally covering the mirror effect and thus increasing the
data. Next, temporal augmentations were also consid-
ered. Each video is up-sampled with a factor of 1.5 to
increase the number of frames within a video. Finally,
we down-sample the videos with a factor of 0.5, thus
throwing away some information from the video clip.
These augmentations helped in generalizing the net-
work. We compare the results before and after the
augmentation and noted in the Table 2.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
480
3.4 Experimental Details
A two-stream I3D model pre-trained on the Kinetics
dataset for both RGB and optical flow modalities was
used. Initially, we train both streams separately with-
out freezing any layers, at this point the model did not
converge on either of the modality. A possible rea-
son was that the dataset was small as compared to the
network depth. Therefore, we used another approach,
this time we froze the model and only trained the last
layer. This fine-tuning technique helped the model in
converging. We did the same for both streams of RGB
and optical flow and noted the results separately. Sec-
ondly, we joined the two modalities during testing via
a softmax function. But the results did not improve as
expected. Lastly, for the fusion scenario, we extracted
features from the pre-trained network, all layers being
frozen, and concatenate them at the last layer. This
concatenation helped in increasing the accuracy.
The model was trained for 100 epochs with a batch
size of 16. An SGD optimizer was used with momen-
tum set to 0.9 in all cases. A multi-GPU scenario was
adapted by utilizing 4 GPUs for training the model.
We started with a learning rate of 0.01 and fine-tuned
its hyperparameters on the validation set of the pro-
posed dataset. The complete architecture was imple-
mented in Pytorch on a Linux operating system.
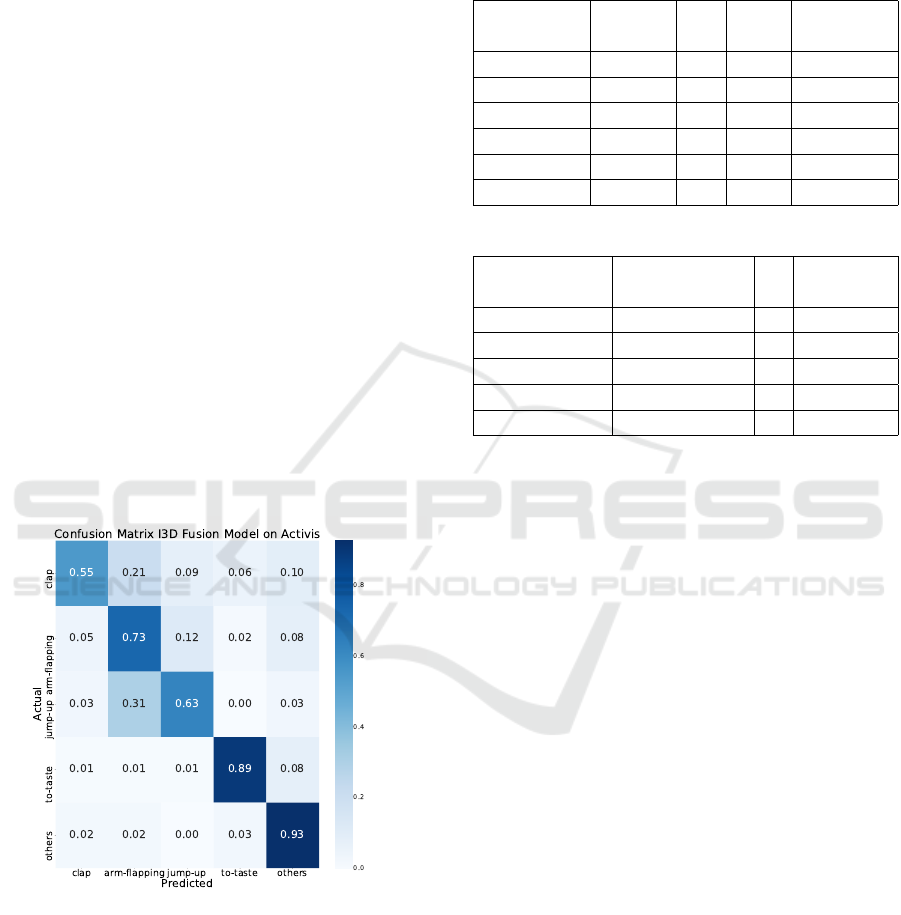
Figure 5: Confusion matrix of proposed method on Activis
dataset.
3.5 Results and Discussion
Cross-validation is a re-sampling technique used
to evaluate architectures on limited data. Since
our dataset is small and highly imbalance, we
adopt StratifiedK-fold approach of Sklearn library.
StratifiedK-folds is the most usable cross-validation
method, where the data is divided into k folds keeping
Table 2: Results of different methods on the collected
dataset. Results are stated on augmented data for all net-
works. A late fusion of two-stream I3D (RGB and optical
flow) resulted in higher accuracy (in bold). All the methods
use a 5-fold-cross-validation technique.
Method
Pre-trained
(Kinetics)
Acc.
no Aug
Acc.
with Aug.
F1 Score
Macro/weighted
HOG + SVM No 23.5 22.7 15/18
CSN rgb Yes (IG-65m) 80.31 81 63/71
X3D rgb Yes 85.3 85.76 68/77
I3D Flow Yes 78.81 80.30 61/70
I3D rgb Yes 84.97 85.01 71/79
Fusion (rgb+flow) Yes 85.6 86.04 72/81
Table 3: Results of different methods on SSBD dataset.
Method Pre-trained (Kinetics) Acc.
F1 Score
macro/weighted
CSN RGB Yes (IG-65m) 71.11 40/59
X3D RGB Yes 64.98 45/61
I3D Flow Yes 30.97 36/48
I3D RGB Yes 76.92 55/60
Fusion (RGB + Flow) Yes 75.62 62.5/69
a balanced ratio of each class. In our experiments, we
keep the value of k 5, generating 5-folds to train the
model and average their results. The data is divided
into 5-folds and tested for low bias and variance. We
proposed the baseline results on Activis and the SSBD
datasets using different modalities and their fusion.
We also perform experiments with other methods in-
cluding X3D (Feichtenhofer, 2020), CSN (Tran et al.,
2019) and a non deep neural network method: HOG +
SVM (Cristianini and Ricci, 2008) classifier. A com-
parison is shown Table 2, and 3.
Furthermore, we provide a confusion matrix of
different methods on Activis dataset in Figure 5 to
better understand the efficiency of our approach. The
confusion matrix results are averaged of the 5-folds.
We also detailed the confusion matrix results on
SSBD dataset in Figure 6.
3.6 Ablation Study
In table 4 we summarize the ablation study in our
experiments. We study the effect of each stream by
training the RGB and optical flow branches sepa-
rately. We also analyze the fusion of the two modal-
ities at different levels (early and late fusion). It is
interesting to see that the fusion at last layer during
training is more effective compared to the fusion at
the test time.
Video-based Behavior Understanding of Children for Objective Diagnosis of Autism
481
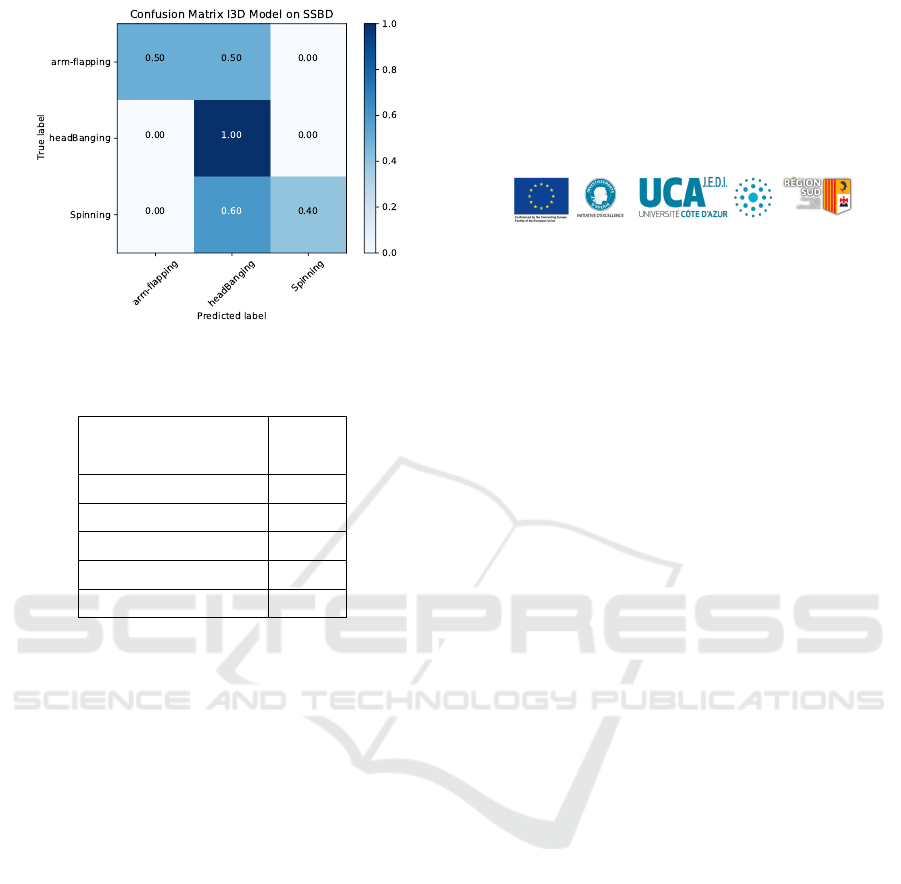
Figure 6: Confusion matrix of proposed method on SSBD
dataset.
Table 4: Ablation study of I3D and its variants.
Method
Acc.
(%)
RGB only 78.8
Flow only 84.97
Fusing during test 82.1
Early fusion 83.3
Late fusion 85.6
4 CONCLUSION
In this paper, we attempt to apply computer vi-
sion techniques for the diagnosis of ASD behav-
iors. For this purpose, we collected and anno-
tated a rich dataset of children’s stereotypic behav-
ior videos recorded in an uncontrolled environment
during their actual diagnosis of ASD. We developed
several action-recognition-based frameworks to rec-
ognize these characteristic behaviors. Several experi-
ments with different modalities and networks are per-
formed to propose a baseline for action recognition of
children having ASD. The baseline results show that a
late fusion of the I3D network having two modalities
outperforms the other methods.
In the future, we plan to increase our dataset by
annotating more videos with more action classes. In
addition, we want to build a subject-oriented dataset
for long-term action tasks, for the development of
technology that will be useful to parents/ caregivers
and clinicians for early diagnosis.
ACKNOWLEDGMENTS
The COFUND BoostUrCAreer program has received
funding from the European Union’s Horizon 2020 re-
search and innovation program under the Marie Curie
grant agreement No 847581, from the R
´
egion SUD
Provence-Alpes-C
ˆ
ote d’Azur and IDEX UCAjedi.
REFERENCES
(2021). World Health Organization (WHO):
Autism spectrum disorders Key Facts.
https://www.who.int/news-room/fact-sheets/detail/
autism-spectrum-disorders.
Anzulewicz, A., Sobota, K., and Delafield-Butt, J. T.
(2016). Toward the autism motor signature: Gesture
patterns during smart tablet gameplay identify chil-
dren with autism. Scientific reports, 6(1):1–13.
Buch, S., Escorcia, V., Shen, C., Ghanem, B., and Car-
los Niebles, J. (2017). Sst: Single-stream temporal
action proposals. In Proceedings of the IEEE con-
ference on Computer Vision and Pattern Recognition,
pages 2911–2920.
Chen, S. and Zhao, Q. (2019). Attention-based autism spec-
trum disorder screening with privileged modality. In
Proceedings of the IEEE/CVF International Confer-
ence on Computer Vision, pages 1181–1190.
Cristianini, N. and Ricci, E. (2008). Support Vector Ma-
chines, pages 928–932. Springer US, Boston, MA.
de Belen, R. A. J., Bednarz, T., Sowmya, A., and
Del Favero, D. (2020). Computer vision in autism
spectrum disorder research: a systematic review of
published studies from 2009 to 2019. Translational
psychiatry, 10(1):1–20.
Edition, F. et al. (2013). Diagnostic and statistical manual
of mental disorders. Am Psychiatric Assoc, 21.
Feichtenhofer, C. (2020). X3d: Expanding architectures
for efficient video recognition. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 203–213.
Hashemi, J., Spina, T. V., Tepper, M., Esler, A., Morel-
las, V., Papanikolopoulos, N., and Sapiro, G. (2012).
A computer vision approach for the assessment of
autism-related behavioral markers. In 2012 IEEE In-
ternational Conference on Development and Learning
and Epigenetic Robotics (ICDL), pages 1–7. IEEE.
Huerta, M. and Lord, C. (2012). Diagnostic evaluation of
autism spectrum disorders. Pediatric Clinics of North
America, 59(1):103.
Jiang, M. and Zhao, Q. (2017). Learning visual attention
to identify people with autism spectrum disorder. In
Proceedings of the ieee international conference on
computer vision, pages 3267–3276.
Kanner, L. et al. (1943). Autistic disturbances of affective
contact. Nervous child, 2(3):217–250.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
482

Knopf, A. (2020). Autism prevalence increases from 1 in
60 to 1 in 54: Cdc. The Brown University Child and
Adolescent Behavior Letter, 36(6):4–4.
Lea, C., Vidal, R., Reiter, A., and Hager, G. D. (2016).
Temporal convolutional networks: A unified approach
to action segmentation. In European Conference on
Computer Vision, pages 47–54. Springer.
Lewis, M. H. and Bodfish, J. W. (1998). Repetitive behavior
disorders in autism. Mental retardation and develop-
mental disabilities research reviews, 4(2):80–89.
Li, B., Mehta, S., Aneja, D., Foster, C., Ventola, P., Shic, F.,
and Shapiro, L. (2019). A facial affect analysis system
for autism spectrum disorder. In 2019 IEEE Interna-
tional Conference on Image Processing (ICIP), pages
4549–4553. IEEE.
Li, J., Zhong, Y., Han, J., Ouyang, G., Li, X., and Liu, H.
(2020). Classifying asd children with lstm based on
raw videos. Neurocomputing, 390:226–238.
Li, J., Zhong, Y., and Ouyang, G. (2018). Identification of
asd children based on video data. In 2018 24th In-
ternational conference on pattern recognition (ICPR),
pages 367–372. IEEE.
Liu, W., Li, M., and Yi, L. (2016). Identifying children
with autism spectrum disorder based on their face pro-
cessing abnormality: A machine learning framework.
Autism Research, 9(8):888–898.
Liu, W., Zhou, T., Zhang, C., Zou, X., and Li, M. (2017).
Response to name: A dataset and a multimodal ma-
chine learning framework towards autism study. In
2017 Seventh International Conference on Affective
Computing and Intelligent Interaction (ACII), pages
178–183. IEEE.
Lord, C., Risi, S., Lambrecht, L., Cook, E. H., Leven-
thal, B. L., DiLavore, P. C., Pickles, A., and Rutter,
M. (2000). The autism diagnostic observation sched-
ule—generic: A standard measure of social and com-
munication deficits associated with the spectrum of
autism. Journal of autism and developmental disor-
ders, 30(3):205–223.
Ma, S., Sigal, L., and Sclaroff, S. (2016). Learning activity
progression in lstms for activity detection and early
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1942–
1950.
Marinoiu, E., Zanfir, M., Olaru, V., and Sminchisescu,
C. (2018). 3d human sensing, action and emotion
recognition in robot assisted therapy of children with
autism. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 2158–
2167.
Milan, A., Leal-Taix
´
e, L., Reid, I., Roth, S., and Schindler,
K. (2016). Mot16: A benchmark for multi-object
tracking. arXiv preprint arXiv:1603.00831.
Negin, F., Ozyer, B., Agahian, S., Kacdioglu, S., and Ozyer,
G. T. (2021). Vision-assisted recognition of stereotype
behaviors for early diagnosis of autism spectrum dis-
orders. Neurocomputing, 446:145–155.
O’Roak, B. J. and State, M. W. (2008). Autism genetics:
strategies, challenges, and opportunities. Autism Re-
search, 1(1):4–17.
Pandey, P., Prathosh, A., Kohli, M., and Pritchard, J. (2020).
Guided weak supervision for action recognition with
scarce data to assess skills of children with autism.
In Proceedings of the AAAI Conference on Artificial
Intelligence, volume 34, pages 463–470.
Rajagopalan, S., Dhall, A., and Goecke, R. (2013). Self-
stimulatory behaviours in the wild for autism diagno-
sis. In Proceedings of the IEEE International Confer-
ence on Computer Vision Workshops, pages 755–761.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Rehg, J., Abowd, G., Rozga, A., Romero, M., Clements,
M., Sclaroff, S., Essa, I., Ousley, O., Li, Y., Kim, C.,
et al. (2013). Decoding children’s social behavior. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3414–3421.
Shao, S., Zhao, Z., Li, B., Xiao, T., Yu, G., Zhang,
X., and Sun, J. (2018). Crowdhuman: A bench-
mark for detecting human in a crowd. arXiv preprint
arXiv:1805.00123.
Simonyan, K. and Zisserman, A. (2014). Two-stream con-
volutional networks for action recognition in videos.
arXiv preprint arXiv:1406.2199.
Tanaka, J. W. and Sung, A. (2016). The “eye avoidance” hy-
pothesis of autism face processing. Journal of autism
and developmental disorders, 46(5):1538–1552.
Teed, Z. and Deng, J. (2020). Raft: Recurrent all-pairs field
transforms for optical flow. In European conference
on computer vision, pages 402–419. Springer.
Tian, Y., Min, X., Zhai, G., and Gao, Z. (2019). Video-
based early asd detection via temporal pyramid net-
works. In 2019 IEEE International Conference on
Multimedia and Expo (ICME), pages 272–277. IEEE.
Tran, D., Bourdev, L., Fergus, R., Torresani, L., and Paluri,
M. (2015). Learning spatiotemporal features with 3d
convolutional networks. In Proceedings of the IEEE
international conference on computer vision, pages
4489–4497.
Tran, D., Wang, H., Torresani, L., and Feiszli, M. (2019).
Video classification with channel-separated convolu-
tional networks. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
5552–5561.
Wang, L., Xiong, Y., Wang, Z., and Qiao, Y. (2015a). To-
wards good practices for very deep two-stream con-
vnets. arXiv preprint arXiv:1507.02159.
Wang, S., Jiang, M., Duchesne, X. M., Laugeson, E. A.,
Kennedy, D. P., Adolphs, R., and Zhao, Q. (2015b).
Atypical visual saliency in autism spectrum disorder
quantified through model-based eye tracking. Neuron,
88(3):604–616.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE international conference on image
processing (ICIP), pages 3645–3649. IEEE.
Zhang, Y., Tian, Y., Wu, P., and Chen, D. (2021). Applica-
tion of skeleton data and long short-term memory in
action recognition of children with autism spectrum
disorder. Sensors, 21(2):411.
Video-based Behavior Understanding of Children for Objective Diagnosis of Autism
483

Zhang, Y., Wang, C., Wang, X., Zeng, W., and Liu, W.
(2020). Fairmot: On the fairness of detection and
re-identification in multiple object tracking. arXiv
preprint arXiv:2004.01888.
Zhou, D. (2014). Real-time animal detection system
for intelligent vehicles. PhD thesis, Universit
´
e
d’Ottawa/University of Ottawa.
Zunino, A., Morerio, P., Cavallo, A., Ansuini, C., Podda, J.,
Battaglia, F., Veneselli, E., Becchio, C., and Murino,
V. (2018). Video gesture analysis for autism spectrum
disorder detection. In 2018 24th International Con-
ference on Pattern Recognition (ICPR), pages 3421–
3426. IEEE.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
484
