
Leveraging Local Domains for Image-to-Image Translation
Anthony Dell’Eva
1
, Fabio Pizzati
1,2
, Massimo Bertozzi
3
and Raoul de Charette
2
1
VisLab, Parma, Italy
2
Inria, Paris, France
3
University of Parma, Parma, Italy
Keywords:
Computer Vision, Generative Networks, Few-shot Learning, Autonomous Driving, Lane Detection, Segmen-
tation.
Abstract:
Image-to-image (i2i) networks struggle to capture local changes because they do not affect the global scene
structure. For example, translating from highway scenes to offroad, i2i networks easily focus on global color
features but ignore obvious traits for humans like the absence of lane markings. In this paper, we leverage
human knowledge about spatial domain characteristics which we refer to as ’local domains’ and demonstrate
its benefit for image-to-image translation. Relying on a simple geometrical guidance, we train a patch-based
GAN on few source data and hallucinate a new unseen domain which subsequently eases transfer learning
to target. We experiment on three tasks ranging from unstructured environments to adverse weather. Our
comprehensive evaluation setting shows we are able to generate realistic translations, with minimal priors, and
training only on a few images. Furthermore, when trained on our translations images we show that all tested
proxy tasks are significantly improved, without ever seeing target domain at training.
1 INTRODUCTION
Apart from their appealing translations, image-to-
image (i2i) GAN networks also offer an alterna-
tive to the supervised-learning paradigm. Indeed,
as translations share features characteristics with the
target domain they can be used to fine-tune proxy
tasks, reducing the need for target annotations. How-
ever, i2i GANs perform well at learning global scene
changes – winter7→summer, paints, etc. (Liu et al.,
2017; Zhu et al., 2017a), – but struggle to learn
subtle local changes. Instead, we leverage human
domain knowledge to guide i2i and improve proxy
tasks on target, without seeing target images. This is
of paramount importance for real-world applications
like autonomous driving (Schutera et al., 2020; Bruls
et al., 2019; Romera et al., 2019) which must operate
safely in all hazardous conditions – some of which are
rarely observed.
We propose a method exploiting human knowl-
edge about source and target, to identify domain-
specific local characteristics which we call local do-
mains (Fig. 1, top). The latter are used as guidance
to perform patches translations on source only, thus
hallucinating a new unseen domain.
I2I GAN
patches extraction
with geometrical
prior
Few-shot
domain
Local domains
Hallucinated domain
No lane markings!
Lane markings
Lane markings
Asphalt
Markings / Asphalt
Snow / No snow In focus / Blur
Local domain identification
No fog / Fog
Figure 1: Overview. Our method is able to generate images
of unseen domains, leveraging geometrical-guidance to ex-
tract patches of local domains, i.e. spatially defined sub-
domains, on source images. Here, we generate an image
without any lane markings training only on an extremely
small amount of images with well-defined lane markings.
Dell’Eva, A., Pizzati, F., Bertozzi, M. and de Charette, R.
Leveraging Local Domains for Image-to-Image Translation.
DOI: 10.5220/0010848900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
179-189
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
179

An example in Fig. 1 bottom shows we leverage
local domains knowledge about ‘lane markings’ and
‘asphalt’ to hallucinate a new domain without lane
markings. The latter domain can then be used to in-
crease robustness on unstructured road environments
which are typically hard to capture but may cause dra-
matic failures.
Experimental evidence in this paper shows indeed
that our new domain acts as a bridge leading to a per-
formance boost on target. Notably, our method ex-
hibits few-shot capabilities, requiring only source im-
ages and minimal human knowledge about the target.
In short, the main contributions of this paper are:
• we introduce and define local domains as being
domain-specific spatial characteristics (Sec. 3.1),
• to the best of our knowledge, we propose the first
geometrical-guided patch-based i2i, leveraging
our local domains priors (Sec. 3.2) and enabling
continuous geometrical translation (Sec. 3.3),
• we experiment on three different tasks in a
few-shot setting, showing that our translations
lead to better performance on all target proxy
tasks (Sec. 4).
2 RELATED WORKS
Image-to-Image Translation (i2i). In 2017, i2i
was introduced as an application of conditional GANs
in (Isola et al., 2017), extended by (Liu et al., 2017;
Zhu et al., 2017b) for multi-modality or better perfor-
mances. In more recent approaches, the obvious limi-
tation of requiring paired images for training has been
removed (Huang et al., 2018b; Zhu et al., 2017a; Lee
et al., 2020; Yi et al., 2017). Recently, there has been
an emergence of attention-based (Mejjati et al., 2018;
Ma et al., 2018; Tang et al., 2019a; Kim et al., 2020;
Lin et al., 2021b) or memory-based (Jeong et al.,
2021) methods, which further guarantee more real-
ism or increased network capabilities. Some meth-
ods guarantee multi-domain translations (Choi et al.,
2018; Choi et al., 2020). The first approach efficiently
exploiting a patch-wise decomposition of images has
been CUT (Park et al., 2020), which exploits patches
from different domains to impose contrastive learn-
ing constraints. All these methods use different data
as source and target and are unable to identify inter-
domain transformation by default.
Image Translation with Less Supervision. A re-
cent field of study focuses on reducing the number
of images necessary for training i2i networks. For
instance, in BalaGAN (Patashnik et al., 2021) they
exploit domain clustering in order to make the train-
ing robust to classes with few examples. Other strate-
gies use self-supervision (Wang et al., 2020) or la-
tent space interpolations (Cao et al., 2021) in order
to avoid the discriminator overfitting and train on ex-
tremely small datasets. Differently, FUNIT (Liu et al.,
2019) and COCO-FUNIT (Saito et al., 2020) gener-
alize to few-shot domains at inference stage. Some
other works try to work with less supervision at the
domain level, on a mixed target domain (Pizzati et al.,
2021a) or without even source and target domain dis-
tinctions (Baek et al., 2020; Lee et al., 2021). It
is worth noticing that some methods are trained on
single images, as SinGAN (Shaham et al., 2019),
employable for image editing tasks. Finally, Zst-
GAN (Lin et al., 2021a) exploits textual inputs for
zero-shot image translation.
Prior-guided Image Translation. Several priors
can be exploited to increase image translation ef-
fectiveness, with several degrees of supervision as
bounding boxes (Shen et al., 2019; Bhattacharjee
et al., 2020), semantic maps (Li et al., 2018; Ramirez
et al., 2018; Tang et al., 2019b; Cherian and Sullivan,
2019; Zhu et al., 2020b; Zhu et al., 2020a; Lin et al.,
2020; Ma et al., 2019; Park et al., 2019) or instance
labels (Mo et al., 2019; Xu et al., 2021). Another line
of works exploits physical models as priors for trans-
lation enhancement (Halder et al., 2019; Tremblay
et al., 2020), disentanglement (Pizzati et al., 2021b),
or guidance (Pizzati et al., 2021a). Importantly, scene
geometry could be used as a prior, with learned cor-
respondences (Wu et al., 2019) or by exploiting ad-
ditional modalities (Arar et al., 2020). Some use text
for image editing purposes (Liu et al., 2020). Oth-
ers exploit full semantic maps for road randomiza-
tion (Bruls et al., 2019), to generalize across chal-
lenging lane detection scenarios. However, they are
limited to annotated road layouts and constrained by
expensive complete segmentation maps.
3 METHOD
We address the problem of image to image translation
accounting for source and target domains having pre-
dominant local transformations. As such, leveraging
only source data, our proposal hallucinates a new un-
seen intermediate domain which can be used to ease
transfer learning towards target. An overview of our
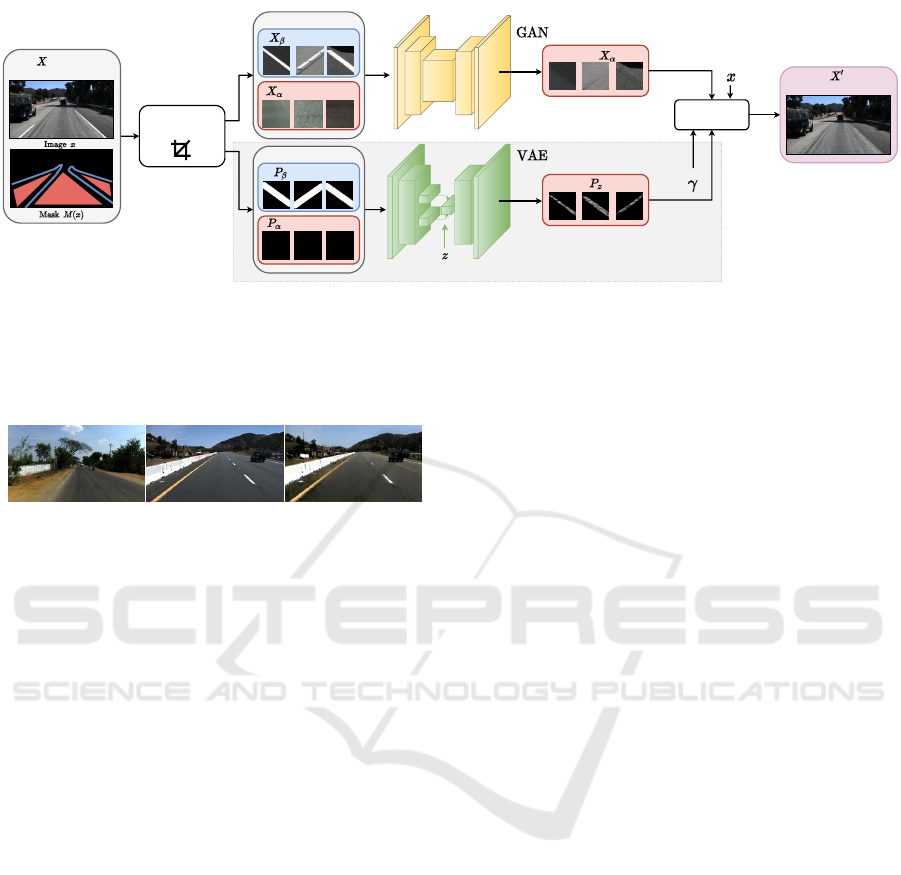
pipeline is in Fig. 2.
In the following, we introduce our definition of
local domains (Sec. 3.1) and propose a geometrical-
guided patch-based strategy to learn translation be-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
180
: Source
: with marking
: without marking
Geometrically-
guided patches
Local domains
: with marking
: without marking
Local domains
Interpolation
Patch-based
training
Composition
Optional
Fake
(Few-shot)
(Hallucinated)
Sec. 3.1
Sec. 3.2
Sec. 3.3
Figure 2: Architecture pipeline. Our method exploits knowledge about local domains (Sec. 3.1) and relies on geometrical-
prior to extract samples of local domains in source only (Sec. 3.2) that train a patch-based GAN. Here, source is having
“lane markings” and “asphalt” local domains (X
α
and X
β
, respectively) while target have only “asphalt” (X
β
), learning X
α
7→
X
β
further reduces the gap with target. An optional local domain interpolation strategy (Sec. 3.3) is added for generating
geometrically continuous translation between local domains (here, simulating lane degradation).
IDD TuSimple TuSimple7→IDD
(Varma et al., 2019) (TuSimple, 2021)
Figure 3: Translation with CycleGAN (Zhu et al., 2017a).
Sample output shows that i2i is prone to transfer global fea-
tures (here, sky color) but neglects evident local features for
humans as the street structure (note that IDD has no lane
markings).
tween the latter (Sec. 3.2). For some local domains,
we also show that a continuous geometrical transla-
tion can be learned from the interpolation of a mask
(Sec. 3.3). Finally, we describe our training strategy
showing few shot capabilities (Sec. 3.4).
3.1 Local Domains
Image-to-image (i2i) networks learn a mapping func-
tion G : X 7→ Y from a source domain X to a target do-
main Y , such that the distribution P
G(X)
approximates
P
Y
. The goal is to transfer the features of domain Y to
samples from X while preserving their content. This
works well for transformation globally affecting the
scene (eg. summer to winter) but struggles to cap-
ture the mappings of local changes due to the under-
constrained settings of the system. A simple failure
example, shown in Fig. 3, is the translation from out-
door images having lane markings, to images having
no (or degraded) lane markings. As it seeks global
changes, the i2i is likely to transfer unintended char-
acteristics while missing the subtle – but consistent –
local changes (here, the lane markings).
To overcome this, we introduce local domains
which are sub-domains spatially defined – for exam-
ple, lane markings, asphalt, etc. Formally, we define
domain X as the composition of local domains, de-
noted {X
α
, ..., X
ω
}, and the remaining sub-domains
written X
O
. Considering only two local domains of
interest, it writes:
X = {X
O
, X
α
, X
β
}. (1)
Because we consider only source and target domains
sharing at least one local domain, say
α
, we write Y
as:
Y = {Y
O
,Y
α
}, (2)
so that the Kullback-Leibler divergence KL(X
α
,Y
α
) is
close to 0. Instead of learning the direct mapping of
X 7→ Y , we propose to learn local domain mappings,
such as X
β
7→ X
α
. If such mapping is applied system-
atically on all samples from X , we get a new domain
X
0
without
β
, so:
X
0
= {X
O
, X
α
}, (3)
where domain X
0
is unseen and thus halluci-
nated. Considering that X
0
and Y share the
same local domains, they are subsequently closer:
KL(Y, X
0
) < KL(Y, X).
Our intuition is that when training target data is
hard to get, our hallucinated domain X
0
can ease trans-
fer learning. Notably here, our method only requires
a priori knowledge of the shared local domains in
source and target.
3.2 Geometrically-guided Patches
Learning the mapping between local domains re-
quires extracting local domain samples. To do so
we leverage patches corresponding to either local do-
mains in the source dataset only. We rely here on
Leveraging Local Domains for Image-to-Image Translation
181

a simple geometrical guidance from a mask M(.) to
extract random patches centered around a given lo-
cal domain.
Considering x an image in source domain X,
we extract X
α
the unordered set of patches of fixed
dimension, so that:
X
α
= {{x
p
0
, x
p
1
, . . . , x
p
m
| p ∈ M
α
(x)}|∀x ∈ X} , (4)
having m the number of patches per image, and
M
α
(x) = JM(x) = αK with J.K the Iverson brackets.
Literally, M(x) is our geometrical prior – a 2D mask
of the same size as x – encoding the position of lo-
cal domains. Subsequently, M
α
(x) is filled with ones
where local domain X
α
is and zeros elsewhere. Simi-
larly to Eq. 4, we extract the set X
β
from M
β
(x) and X .
In practice, the geometrical prior M(x) is often
simply derivable from the image labels. For exam-
ple, the position of lane marking and asphalt can both
be extracted from image labels. In some cases, the
position of local domains is constant dataset-wise and
we use a fixed geometrical prior, so M(x) = M. This
is for example the case for portraits datasets, where
faces are likely to be centered and background located
along the image edges.
Having collected the two sets of patches X
α
and
X
β
, a straightforward patch-based GAN can learn
X
α
7→ X
β
. In some cases, X
α
and X
β
being of similar
nature we demonstrate spatial interpolation is benefi-
cial.
3.3 Local Domains Interpolation
Continuous i2i are extensively studied (Gong et al.,
2019; Wang et al., 2019; Lample et al., 2017), but
existing methods are not suitable for translation af-
fecting only local regions as in our problem set-
ting (see Sec. 4). Instead, we learn a non-linear ge-
ometrical interpolation of patch masks, leveraging a
variational autoencoder (VAE).
Previously we described each patch as encom-
passing a single local domain but, in reality, patches
often mix multiple local domains. This is the case of
lane markings patches, shown in Fig. 2, that contain
asphalt too. Hence, along with the set of local do-
mains patches we extract the sets P
α
and P
β
directly
from our geometrical guidance M(.), and seek to con-
tinuously interpolate P
α
7→ P
β
.
In practice, our VAE having encoder E(.) and de-
coder D(.) is trained in the standard fashion, but at
inference it yields the latent representation h
Z
cor-
responding to the linear combination of E(p
α
) and
E(p
β
), having p
α
∈ P
α
and p
β
∈ P
β
, respectively
1
.
1
Our formalism includes VAE reparametrization in E(.)
Formally:
h
Z
= E(p
α
)z + E(p
β
)(1 − z),
p
z
= D(h
Z
),
(5)
where z ∈ [0, 1] encodes the progress along P
α
7→ P
β
.
The final interpolated patch x
z
is the composite be-
tween x
α
and x
β
patches, following the VAE output.
It writes:
x
z
= x
α
m + x
β
(1 − m),
with m = γ p
z
,
(6)
γ ∈ [0, 1] being an arbitrary controlled blending pa-
rameter adding a degree of freedom to our model.
Furthermore, notice that the stochastic VAE be-
havior further increases variability, beneficial for
proxy tasks.
3.4 Training
We train our pipeline, the patch-based GAN and
the optional VAE, leveraging only images from the
source domain and geometrical priors about local do-
mains. The patch-based GAN is trained on X
α
7→ X
β
(Sec. 3.2) minimizing the LSGAN (Mao et al., 2017)
adversarial loss:
y
f
= G(x),
L
G
(y
f
) = E
x∼P
X
(x)
(D(y
f
) − 1)
2
,
L
D
(y
f
, y) = E
x∼P
X
(x)
(D(y
f
))
2
+
+ E
y∼P
Y
(y)
(D(y) − 1)
2
,
(7)
along with task-specific losses. If used, the VAE in-
terpolation (Sec. 3.3) is trained with standard ELBO
strategy (Blei et al., 2017), minimizing reconstruction
loss along with a regularizer:
L
VAE
= −E
q
φ
(z|x)
log p
θ
(x|z)+
+ D
KL
(q
φ
(z|x)||p(z)).
(8)
At inference time, the full image is fed to the GAN
backbone to produce the translated image, while the
corresponding full interpolation mask is obtained pro-
cessing mask patches independently and then stitch-
ing them together with a simple algorithm. Of note,
our method has important few-shot capabilities. As
we train only on source patches, a reduced number
of image samples is sufficient to get reasonable data
diversity, which we further demonstrated in the fol-
lowing section.
4 EXPERIMENTS
We evaluate our method on 3 different tasks, namely
lane markings degradation, snow addition and deblur-
ring, leveraging 5 recent datasets (TuSimple, 2021;
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
182

Task with interpolation
Original Ours
Lane degradation
0.35
0.95
Task without interpolation
Snow addition
Original
Ours
Deblurring
Original
Ours
z
Figure 4: Qualitative results. For each task we show the original input image and our output with the X
β
7→ X
α
local domains
translation. Lane degradation: sample translations on TuSimple (TuSimple, 2021) test set with increasing degradation
z ∈ [0.35, 0.95] from left to right, blending variable γ = 0.75. Snow addition: augmentation of ACDC (Sakaridis et al., 2021)
validation set, only road is involved in the transformation. Deblurring: Original flower images (Nilsback and Zisserman,
2008) and our deblurred version. Bottom left insets show the in-focus map (Golestaneh and Karam, 2017) which are whiter
on average (ie. less blurred) for ours.
Varma et al., 2019; Sakaridis et al., 2021; Cordts
et al., 2016; Nilsback and Zisserman, 2008), and eval-
uating our translation both against i2i baselines and
on proxy tasks. In Sec. 4.1 we provide details on our
tasks, while Secs. 4.2, 4.3 report extensive qualitative
and quantitative evaluation.
4.1 Tasks Definitions
We describe our three task below, detailing the
learned local domains translation X
β
7→ X
α
.
Lane Degradation. Here, we leverage the highway
TuSimple (TuSimple, 2021) dataset having clear lane
markings. For local domains, we chose lane mark-
ing (X
β
) and asphalt (X
α
) exploiting geometrical
priors from the provided lane labels and assuming
near by asphalt. We use our interpolation strat-
egy (Sec. 3.3) accounting for both degradation and
blending. Importantly, we train only on 15 im-
ages (1280x720) to demonstrate few-shot capabilities,
with 30 patches per image of size 128x128, 200x200
and 256x256. Backbones are DeepFillv2 (Yu et al.,
2019) as GAN and IntroVAE (Huang et al., 2018a)
for interpolation. The latter is trained with a bina-
rized difference mask from lane inpainting and orig-
inal image. We evaluate our translations on the stan-
dard 358/2782 val/test sets of TuSimple. In addition
to demonstrating generalization, we evaluate several
lane detectors on 110 images from the India Driving
Dataset (IDD) (Varma et al., 2019) – never seen dur-
ing training – having degraded lane markings which
we manually annotated.
Snow Addition. Here, we rely on snowy images
from the recent Adverse Driving Conditions Dataset
(ACDC) (Sakaridis et al., 2021), which typically have
snow only on the sidewalk and not on the road. The
task is to add snow on the road. Logically, local do-
mains are road (X
β
) and snowy sidewalk (X
α
), ex-
ploiting semantic labels as priors. Again, we train
only with 15 images with 30 patches (128x128) per
image , using CycleGAN (Zhu et al., 2017a) with de-
fault hyperparameters. No interpolation is used.
We evaluate on the original val/test set of ACDC
having 100/500 images. To increase generalization
for the segmentation task in snowy weather, we also
augment Cityscapes (Cordts et al., 2016) with the
same trained network.
Leveraging Local Domains for Image-to-Image Translation
183
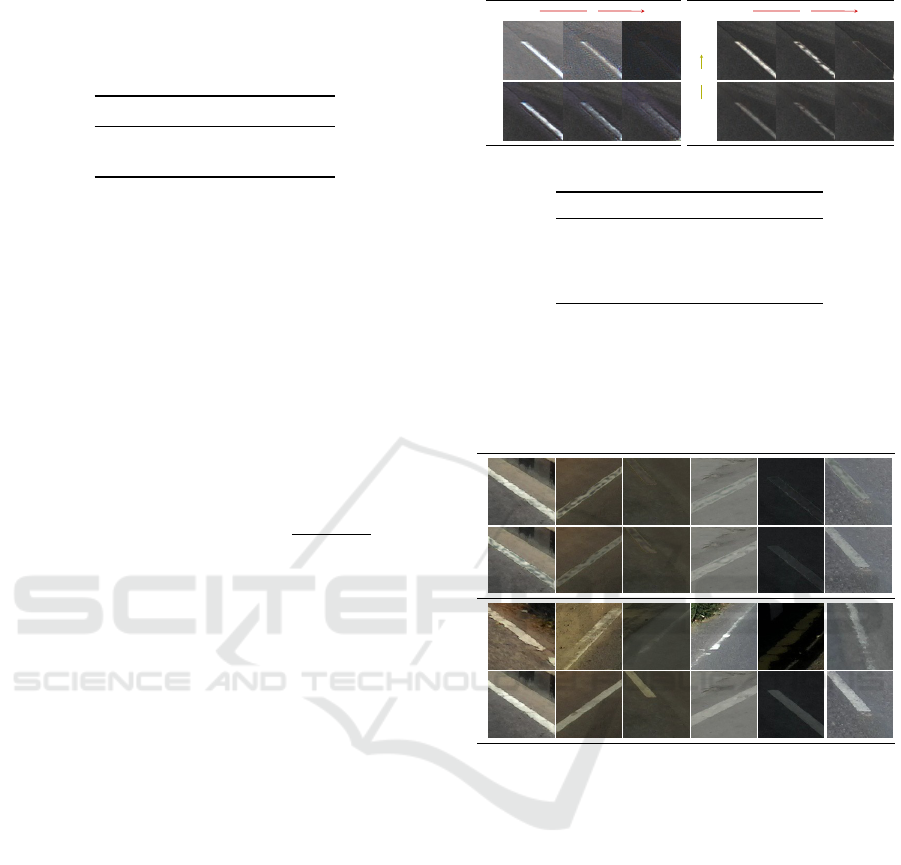
Table 1: Deblurring performance. Average of the in-
focus maps (Golestaneh and Karam, 2017) on the Oxford
Flowers (Nilsback and Zisserman, 2008) test set shows our
method efficiently deblur the input images despite a trivial
dataset-wise geometrical prior.
Images In-focus avg↑
Original 1.28
Ours (deblurred) 1.53
Deblurring. We leverage the Oxford 102 Flower
dataset (Nilsback and Zisserman, 2008) to learn turn-
ing shallow Depth of Field (DoF) photos to deep DoF,
therefore seeking to deblur the image. As blur is not
labeled, we rely on a simple dataset-wise geometri-
cal prior, i.e. that the image center is always in-focus
and image corners are always out-of-focus. Local do-
mains are out-of-focus (X
β
) and in-focus (X
α
). Since
we use only 8 patches per image (4 in-focus, 4 out-of-
focus, 128x128), we train our CycleGAN (Zhu et al.,
2017a) with 400 images, adding a task-specific ob-
jective function defined as the composition of a color
consistency loss and an in-focus loss:
L
deblur
= D
KL
(H[x]||H[G(x)]) +
1
σ
2
LoG(G(x))
, (9)
with H[.] the image histogram and σ
2
LoG(.)
the Lapla-
cian of Gaussian variance. A color jitter augmentation
is applied to ensure discriminator invariance to color.
We do not use interpolation. At inference, we exclude
foreground since it impacts translation quality due to
the identity loss in CycleGAN (Zhu et al., 2017a).
4.2 Evaluation
4.2.1 Translation Quality
Qualitative results are visible in Fig. 4 and show our
method outputs realistic translations for all tasks. In
detail, we are able to modify lanes (first three rows) on
TuSimple with different degrees of degradation (from
left to right). On snow addition, images show plausi-
ble snow on ACDC roads (middle two rows), preserv-
ing shadows. Finally, on our deblurring task (bottom
two rows) the flowers background appears in-focus,
exhibiting sharper edges. To better size the benefit on
this last task, flower images have as inset the in-focus
map computed with (Golestaneh and Karam, 2017).
In extenso, white means in-focus.
Of note, evaluating GAN metrics on target images
would be biased since we use only source images –
unlike existing i2i –. They are reported in Appendix
for the sake of completeness. To provide a quantita-
tive quality evaluation, Tab. 1 reports the in-focus av-
Baselines
0
1
DLOW
(Gong et al., 2019)
DLOW+
z
Ours
0
1
1
0.35
z
γ
(a) Qualitative
Network FID↓ LPIPS↓
DLOW (Gong et al., 2019) 211.7 0.4942
DLOW+ 155.6 0.4206
Ours w/o blending 154.7 0.3434
Ours 135.4 0.3254
(b) GAN metrics
Figure 5: Lane translations. (a) Qualitative comparison
of lane degradation on patches with baselines. Our method
is the only one to output a realistic degradation. (b) GAN
metrics on the lane degradation task prove the benefit of our
method.
2nd best
0.3 1.0 0.5 1.0 0.5 0.2 0.5 0.8 0.4 0.2 0.6 0.4
Best matching
0.6 1.0 0.4 0.6 0.6 0.4 0.4 1.0 0.3 0.4 0.3 0.6
Degraded ref.
Clear
Figure 6: Evaluation of lane degradation on patches
taken from IDD dataset (Varma et al., 2019). We as-
sociate clear patches (bottom row) to degraded ones (third
row) by minimizing LPIPS. Applying our method to clean
images variating the z and γ parameters (shown in the im-
ages), we subsequently lower the LPIPS. We display the
best and second-best translation in terms of LPIPS. The
similarities of our results with the degraded patches prove
the efficacy of our LPIPS-based evaluation.
erage proving our translations are significantly more
in-focus (+0.24) than original images.
4.2.2 Interpolation Quality
For the lane degradation task, we compare our in-
terpolations against the continuous i2i DLOW (Gong
et al., 2019) baseline, trained on the same data. As
it suffers from evident color artifacts, we introduce
DLOW+: a custom version using lane mask as addi-
tional channel input, masked reconstruction loss, and
masked input-output blending. For DLOW/DLOW+,
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
184
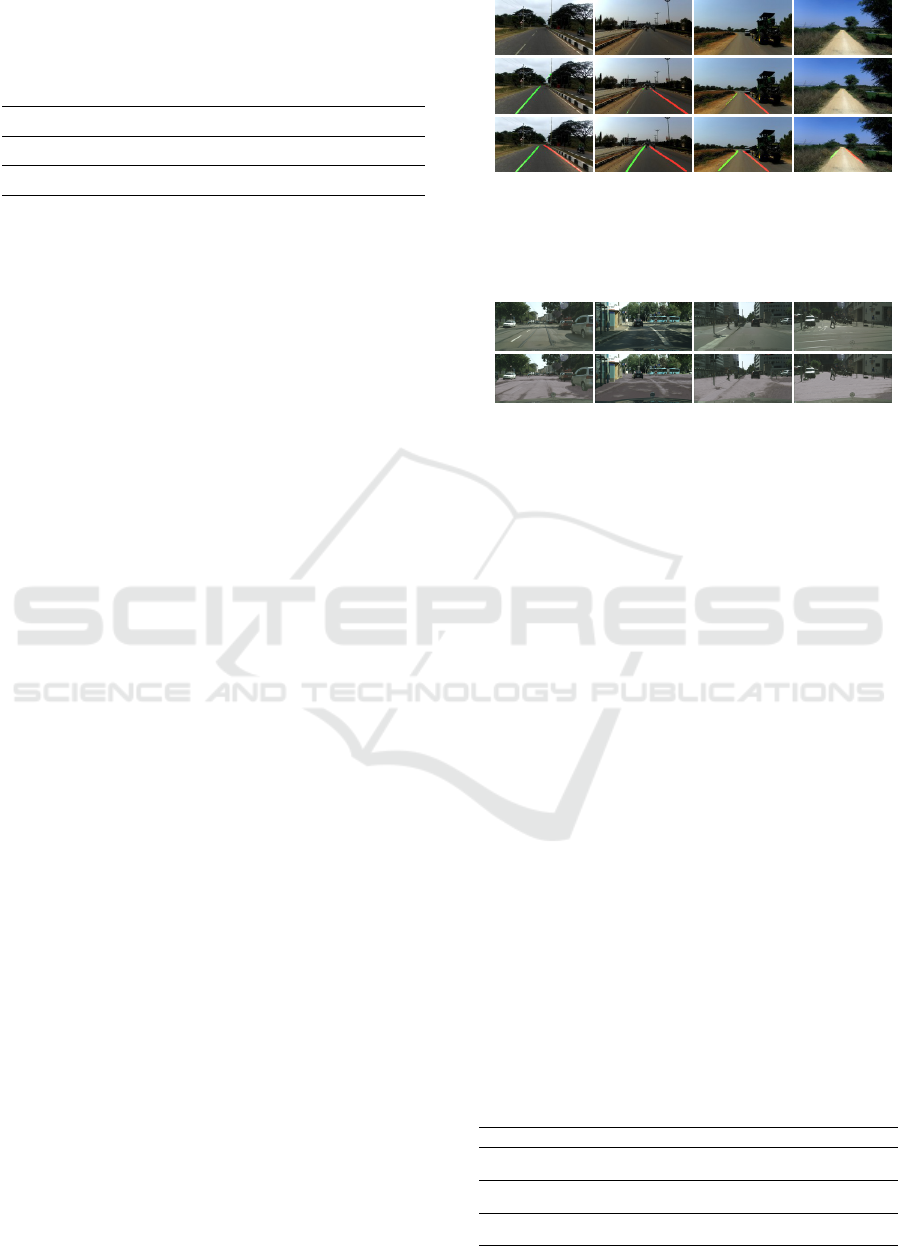
Table 2: Lane detection on TuSimple and IDD. Perfor-
mance of lane detectors when trained on TuSimple source
(none) or our degraded translations (ours). The latter sig-
nificantly outperforms baseline, while retaining equivalent
performances on TuSimple images.
Detector Translation
TuSimple (TuSimple, 2021) IDD (Varma et al., 2019)
Acc. ↑ FP ↓ FN ↓ Acc. ↑ FP ↓ FN ↓
SCNN (Pan et al., 2017)
none (source) 0.946 0.052 0.069 0.617 0.538 0.741
Ours 0.945 0.058 0.072 0.730 0.453 0.577
RESA (Zheng et al., 2021)
none (source) 0.952 0.056 0.065 0.639 0.720 0.800
Ours 0.951 0.059 0.068 0.671 0.686 0.761
we regulate the walk on the discovered manifold of
each network with a domainness variable z – which
amounts to our lane degradation.
With respect to baselines, it is visible in Fig. 5a
that our degraded lane translations are more realis-
tic for all z since DLOW and DLOW+ discover sim-
pler transformations, just regulating color homoge-
neously.
For quantification, we compare translations
against real degraded lane markings from IDD and
report FID and LPIPS in Fig. 5b. In detail, we select
35/62 clear/degraded lane patches from IDD test set,
and couple those with minimum LPIPS (Zhang et al.,
2018) distance. Intuitively, we pair similar clear and
degraded lane markings together. Pairs are shown in
the two bottom rows of Fig. 6. We then degrade each
clear image with ours / DLOW / DLOW+, generating
several degraded versions, and use the best degrad-
ing version in terms of LPIPS w.r.t. its clear match
to compute GAN metrics. Fig. 5b shows we outper-
form baseline on both metrics significantly (roughly,
-20 FID, and -0.1 LPIPS), demonstrating the realism
of our lane degradation. Since baselines are not using
any explicit blending as us (see γ in Eq. 6), we also
evaluate “ours w/o blending” using m = p
z
in Eq. 6,
which still outperforms baselines.
4.2.3 Proxy Tasks
Here, we study the applicability of our pipeline to in-
crease the robustness of existing lane detection and
semantic segmentation networks.
Lane Detection. We aim here to make lane detec-
tors robust to unseen degraded lane markings. To do
so, we train two state-of-the-art detectors, SCNN (Pan
et al., 2017) and RESA (Zheng et al., 2021), on
both TuSimple original images and our translated ver-
sion (mixing with 5% probability and randomizing z
and γ). The models are tested on both the TuSimple
test set and our 110 labeled IDD images, the latter
having severely degraded lane markings.
From the quantitative results in Tab. 2, we observe
that with our source degraded translations both de-
tectors severely outperform the baselines using clear
Input
none
Ours
Figure 7: SCNN (Pan et al., 2017) lane detection on
IDD (Varma et al., 2019). Training on generated images
with degraded lanes makes existing lane detectors – such as
SCNN (Pan et al., 2017) – resistant to scenes with damaged
(first three columns) or no (last column) lane markings.
Original
Ours
Figure 8: Cityscapes images with snow added. We add
snow on roads and sidewalks of the Cityscapes training set
to train semantic segmentation networks robust to snow.
Cityscapes exhibits a domain shift with respect to ACDC,
but our method is still able to generate acceptable snow.
source on the challenging IDD, while maintaining on-
par performances on TuSimple with clear markings.
In particular, for SCNN we improve by +11.3% the
accuracy, −8.5% the false positives and −16.4% the
false negatives. Sample qualitative results are in Fig. 7
and showcase the robustness of our method on de-
graded or even absent street lines. We conjecture that
our degraded translations forced the network to rely
on stronger contextual information.
Semantic Segmentation. Here, we seek to im-
prove segmentation in snowy driving conditions.
We train three state-of-the-art semantic segmentation
models, namely DeepLabv3+ (Chen et al., 2018),
PSANet (Zhao et al., 2018) and OCRNet (Yuan et al.,
2020), with either clear Cityscapes images and snowy
Cityscapes images translated with our method. Trans-
lation examples are available in Fig. 8, where we add
snow on sidewalks and roads by using Cityscapes se-
Table 3: Semantic segmentation on ACDC (Sakaridis
et al., 2021) snow. We train multiple segmentation net-
works on Cityscapes (Cord and Aubert, 2011) with added
snow with our method and test on ACDC (Sakaridis et al.,
2021) snow validation, consistently improving generaliza-
tion capabilities.
Model Translations road IoU ↑ sidewalk IoU ↑ mIoU ↑
DeepLabv3+ (Chen et al., 2018)
none (source) 74.95 39.52 45.31
Ours 80.56 49.52 47.64
PSANet (Zhao et al., 2018)
none (source) 74.29 30.71 42.97
Ours 74.01 36.28 43.85
OCRNet (Yuan et al., 2020)
none (source) 82.30 45.60 54.54
Ours 82.78 54.69 55.48
Leveraging Local Domains for Image-to-Image Translation
185

Input
GT
none
Ours
Figure 9: DeepLabv3+ (Chen et al., 2018) on
ACDC (Sakaridis et al., 2021) snow. Training with our
generated images brings improvements in segmentation of
snowy scenes in ACDC (Sakaridis et al., 2021), especially
in the road and sidewalk classes.
Table 4: Data ablation on TuSimple. The use of data
on the lane degradation task (TuSimple 7→ IDD) is ablated
by varying the number of images and patches per image in
the training set, and evaluating GAN similarity metrics (see
Sec. 4.2.2) on IDD.
TuSimple samples (%) Patches/img LPIPS↓ FID↓
15 (0.4%) 1 0.3296 148.22
15 (0.4%) 5 0.3295 135.53
15 (0.4%) 30 0.3254 131.73
15 (0.4%) 60 0.3246 127.94
15 (0.4%) 150 0.3222 126.94
50 (1.4%) 30 0.3236 129.42
150 (4.1%) 30 0.3221 124.79
500 (14%) 30 0.3234 128.56
3626 (100%) 30 0.3218 125.56
mantic maps. Visual results remain acceptable and
snow is added uniformly on both semantic classes,
even if inference on Cityscapes brings a consistent do-
main shift with respect to training patches on ACDC.
In detail, for the latter we augment images with
10% (DeepLabv3+, PSANet) or 5% (OCRNet) prob-
ability. The models are evaluated on the ACDC snow
validation set.
Tab. 3 shows the benefit of our augmented im-
ages (Ours) to consistently improve the performance
on road or sidewalk (our two local domains) and
mean IoU for all networks. From Fig. 9 it is visible
that the model trained with our augmentation strategy
is able to better detect roads and footpaths in diffi-
cult weather conditions with respect to the baseline,
which is not capable of properly discriminating be-
tween them if they are covered with snow.
4.3 Ablation Study
Training Images and Patches. As mentioned our
method requires very few images to train. Here, we
study the effect of number of images and patches
Table 5: Augmentation percentage ablation on
Cityscapes. The effectiveness of our snow addition trans-
lation is ablated by varying the probability of Cityscapes
augmented images shown to DeepLabv3+ (Chen et al.,
2018) during training. Segmentation evaluation is reported
on ACDC (Sakaridis et al., 2021) validation set.
Augmented images (%) road IoU↑ sidewalk IoU↑ mIoU↑
100 36.43 35.26 39.83
66 60.43 43.81 46.84
50 68.78 45.79 50.31
20 75.85 44.60 47.36
10 80.56 49.52 47.64
0 (none) 74.95 39.52 45.31
per image on the lane degradation task. To measure
its impact, we use LPIPS (Zhang et al., 2018) and
FID (Heusel et al., 2017) following Sec. 4.2.2.
Results in Tab. 4 show, as expected, better trans-
lation with the increase of both the number of images
and the number of patches extracted per each image.
However, we also denote the few-shot capability of
our method and the minimal benefit of using a large
number of images.
Augmentation Percentage. We study also how
the percentage of augmented images shown to
DeepLabv3+ network at training impacts perfor-
mances on semantic segmentation in snowy condi-
tions.
As indicated in Tab. 5, even if we achieve the
best performances with an augmentation probability
of 50% (+5% mIoU w.r.t. no augmentation), we still
use for evaluation in Sec. 4.2 the model obtained with
10% for its higher accuracy on road and sidewalk –
crucial for autonomous navigation tasks.
5 CONCLUSION
In this work, we proposed a patch-based image-to-
image translation model which relies on a GAN back-
bone trained on patches and an optional VAE to in-
terpolate non-linearly between domains. Along with
the definition of local domains, we introduced a
dataset-based geometrical guidance strategy to ease
the patches extraction process. Our few-shot method
outperformed the literature on all tested metrics on
several tasks (lane degradation, snow addition, de-
blurring), and its usability has been demonstrated on
proxy tasks. In particular, our translation pipeline led
to higher performances on lane detection in scenes
with degraded or absent markings and on semantic
segmentation in snowy conditions.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
186

REFERENCES
Arar, M., Ginger, Y., Danon, D., Bermano, A. H., and
Cohen-Or, D. (2020). Unsupervised multi-modal im-
age registration via geometry preserving image-to-
image translation. In CVPR.
Baek et al., K. (2020). Rethinking the truly unsupervised
image-to-image translation. arXiv.
Bhattacharjee, D., Kim, S., Vizier, G., and Salzmann, M.
(2020). Dunit: Detection-based unsupervised image-
to-image translation. In CVPR.
Blei, D. M., Kucukelbir, A., and McAuliffe, J. D. (2017).
Variational inference: A review for statisticians. Jour-
nal of the American statistical Association.
Bruls, T., Porav, H., Kunze, L., and Newman, P. (2019).
Generating all the roads to rome: Road layout ran-
domization for improved road marking segmentation.
In ITSC.
Cao, J., Hou, L., Yang, M.-H., He, R., and Sun, Z. (2021).
Remix: Towards image-to-image translation with lim-
ited data. In CVPR.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In ECCV.
Cherian, A. and Sullivan, A. (2019). Sem-gan:
Semantically-consistent image-to-image translation.
In WACV.
Choi, Y., Choi, M., Kim, M., Ha, J.-W., Kim, S., and Choo,
J. (2018). Stargan: Unified generative adversarial net-
works for multi-domain image-to-image translation.
In CVPR.
Choi, Y., Uh, Y., Yoo, J., and Ha, J.-W. (2020). Stargan
v2: Diverse image synthesis for multiple domains. In
CVPR.
Cord, A. and Aubert, D. (2011). Towards rain detection
through use of in-vehicle multipurpose cameras. In
IV.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In CVPR.
Golestaneh, S. A. and Karam, L. J. (2017). Spatially-
varying blur detection based on multiscale fused and
sorted transform coefficients of gradient magnitudes.
In CVPR.
Gong, R., Li, W., Chen, Y., and Gool, L. V. (2019). Dlow:
Domain flow for adaptation and generalization. In
CVPR.
Halder, S. S., Lalonde, J.-F., and de Charette, R. (2019).
Physics-based rendering for improving robustness to
rain. In ICCV.
Heusel, M., Ramsauer, H., Unterthiner, T., Nessler, B., and
Hochreiter, S. (2017). Gans trained by a two time-
scale update rule converge to a local nash equilibrium.
In NeurIPS.
Huang, H., Li, Z., He, R., Sun, Z., and Tan, T. (2018a). In-
trovae: Introspective variational autoencoders for pho-
tographic image synthesis. In NeurIPS.
Huang, X., Liu, M.-Y., Belongie, S., and Kautz, J. (2018b).
Multimodal unsupervised image-to-image translation.
In ECCV.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In CVPR.
Jeong, S., Kim, Y., Lee, E., and Sohn, K. (2021). Memory-
guided unsupervised image-to-image translation. In
CVPR.
Kim, J., Kim, M., Kang, H., and Lee, K. (2020). U-
gat-it: unsupervised generative attentional networks
with adaptive layer-instance normalization for image-
to-image translation. In ICLR.
Lample, G., Zeghidour, N., Usunier, N., Bordes, A., De-
noyer, L., and Ranzato, M. (2017). Fader net-
works: Manipulating images by sliding attributes. In
NeurIPS.
Lee, H., Seol, J., and Lee, S.-g. (2021). Contrastive learning
for unsupervised image-to-image translation. arXiv.
Lee, H.-Y., Tseng, H.-Y., Mao, Q., Huang, J.-B., Lu, Y.-D.,
Singh, M., and Yang, M.-H. (2020). Drit++: Diverse
image-to-image translation via disentangled represen-
tations. IJCV.
Li, P., Liang, X., Jia, D., and Xing, E. P. (2018). Semantic-
aware grad-gan for virtual-to-real urban scene adap-
tion. BMVC.
Lin, C.-T., Wu, Y.-Y., Hsu, P.-H., and Lai, S.-H.
(2020). Multimodal structure-consistent image-to-
image translation. In AAAI.
Lin, J., Xia, Y., Liu, S., Zhao, S., and Chen, Z. (2021a). Zst-
gan: An adversarial approach for unsupervised zero-
shot image-to-image translation. Neurocomputing.
Lin, Y., Wang, Y., Li, Y., Gao, Y., Wang, Z., and Khan, L.
(2021b). Attention-based spatial guidance for image-
to-image translation. In WACV.
Liu, M.-Y., Breuel, T., and Kautz, J. (2017). Unsupervised
image-to-image translation networks. In NeurIPS.
Liu, M.-Y., Huang, X., Mallya, A., Karras, T., Aila, T.,
Lehtinen, J., and Kautz, J. (2019). Few-shot unsu-
pervised image-to-image translation. In ICCV.
Liu, Y., De Nadai, M., Cai, D., Li, H., Alameda-Pineda,
X., Sebe, N., and Lepri, B. (2020). Describe what to
change: A text-guided unsupervised image-to-image
translation approach. In ACM MM.
Ma, L., Jia, X., Georgoulis, S., Tuytelaars, T., and
Van Gool, L. (2019). Exemplar guided unsupervised
image-to-image translation with semantic consistency.
In ICLR.
Ma, S., Fu, J., Wen Chen, C., and Mei, T. (2018). Da-
gan: Instance-level image translation by deep atten-
tion generative adversarial networks. In CVPR.
Mao, X., Li, Q., Xie, H., Lau, R. Y. K., Wang, Z., and Smol-
ley, S. P. (2017). Least squares generative adversarial
networks. In ICCV.
Mejjati, Y. A., Richardt, C., Tompkin, J., Cosker, D., and
Kim, K. I. (2018). Unsupervised attention-guided
image-to-image translation. In NeurIPS.
Mo, S., Cho, M., and Shin, J. (2019). Instagan: Instance-
aware image-to-image translation. ICLR.
Leveraging Local Domains for Image-to-Image Translation
187

Nilsback, M.-E. and Zisserman, A. (2008). Automated
flower classification over a large number of classes.
In Indian Conference on Computer Vision, Graphics
and Image Processing.
Pan, X., Shi, J., Luo, P., Wang, X., and Tang, X. (2017).
Spatial as deep: Spatial cnn for traffic scene under-
standing. In AAAI.
Park, T., Efros, A. A., Zhang, R., and Zhu, J.-Y. (2020).
Contrastive learning for unpaired image-to-image
translation. In ECCV.
Park, T., Liu, M.-Y., Wang, T.-C., and Zhu, J.-Y. (2019).
Semantic image synthesis with spatially-adaptive nor-
malization. In CVPR.
Patashnik, O., Danon, D., Zhang, H., and Cohen-Or, D.
(2021). Balagan: Cross-modal image translation be-
tween imbalanced domains. In CVPR Workshops.
Pizzati, F., Cerri, P., and de Charette, R. (2021a). Comogan:
continuous model-guided image-to-image translation.
In CVPR.
Pizzati, F., Cerri, P., and de Charette, R. (2021b). Guided
disentanglement in generative networks. arXiv.
Ramirez, P. Z., Tonioni, A., and Di Stefano, L. (2018). Ex-
ploiting semantics in adversarial training for image-
level domain adaptation. In IPAS.
Romera, E., Bergasa, L. M., Yang, K., Alvarez, J. M., and
Barea, R. (2019). Bridging the day and night domain
gap for semantic segmentation. In IV.
Saito, K., Saenko, K., and Liu, M.-Y. (2020). Coco-funit:
Few-shot unsupervised image translation with a con-
tent conditioned style encoder. In ECCV.
Sakaridis, C., Dai, D., and Gool, L. V. (2021). Acdc: The
adverse conditions dataset with correspondences for
semantic driving scene understanding. In ICCV.
Schutera, M., Hussein, M., Abhau, J., Mikut, R., and Reis-
chl, M. (2020). Night-to-day: Online image-to-image
translation for object detection within autonomous
driving by night. IEEE T-IV.
Shaham, T. R., Dekel, T., and Michaeli, T. (2019). Singan:
Learning a generative model from a single natural im-
age. In ICCV.
Shen, Z., Huang, M., Shi, J., Xue, X., and Huang, T. S.
(2019). Towards instance-level image-to-image trans-
lation. In CVPR.
Tang, H., Xu, D., Sebe, N., and Yan, Y. (2019a). Attention-
guided generative adversarial networks for unsuper-
vised image-to-image translation. In IJCNN.
Tang, H., Xu, D., Yan, Y., Corso, J. J., Torr, P. H., and Sebe,
N. (2019b). Multi-channel attention selection gans for
guided image-to-image translation. In CVPR.
Tremblay, M., Halder, S. S., de Charette, R., and Lalonde,
J.-F. (2020). Rain rendering for evaluating and im-
proving robustness to bad weather. IJCV.
TuSimple (2021). Tusimple benchmark. In
https://github.com/TuSimple/tusimple-benchmark.
Varma, G., Subramanian, A., Namboodiri, A., Chandraker,
M., and Jawahar, C. V. (2019). Idd: A dataset for
exploring problems of autonomous navigation in un-
constrained environments. In WACV.
Wang, X., Yu, K., Dong, C., Tang, X., and Loy, C. C.
(2019). Deep network interpolation for continuous
imagery effect transition. In CVPR.
Wang, Y., Khan, S., Gonzalez-Garcia, A., Weijer, J. v. d.,
and Khan, F. S. (2020). Semi-supervised learning for
few-shot image-to-image translation. In CVPR.
Wu, W., Cao, K., Li, C., Qian, C., and Loy, C. C. (2019).
Transgaga: Geometry-aware unsupervised image-to-
image translation. In CVPR.
Xu, M., Lee, J., Fuentes, A., Park, D. S., Yang, J., and Yoon,
S. (2021). Instance-level image translation with a lo-
cal discriminator. IEEE Access.
Yi, Z., Zhang, H., Tan, P., and Gong, M. (2017). Dualgan:
Unsupervised dual learning for image-to-image trans-
lation. In ICCV.
Yu, J., Lin, Z., Yang, J., Shen, X., Lu, X., and Huang, T.
(2019). Free-form image inpainting with gated con-
volution. In ICCV.
Yuan, Y., Chen, X., and Wang, J. (2020). Object-contextual
representations for semantic segmentation. In ECCV.
Zhang, R., Isola, P., Efros, A. A., Shechtman, E., and Wang,
O. (2018). The unreasonable effectiveness of deep
features as a perceptual metric. In CVPR.
Zhao, H., Zhang, Y., Liu, S., Shi, J., Loy, C. C., Lin, D.,
and Jia, J. (2018). Psanet: Point-wise spatial attention
network for scene parsing. In ECCV.
Zheng, T., Fang, H., Zhang, Y., Tang, W., Yang, Z., Liu,
H., and Cai, D. (2021). Resa: Recurrent feature-shift
aggregator for lane detection. In AAAI.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017a).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. In CVPR.
Zhu, J.-Y., Zhang, R., Pathak, D., Darrell, T., Efros, A. A.,
Wang, O., and Shechtman, E. (2017b). Toward multi-
modal image-to-image translation. In NeurIPS.
Zhu, P., Abdal, R., Qin, Y., and Wonka, P. (2020a). Sean:
Image synthesis with semantic region-adaptive nor-
malization. In CVPR.
Zhu, Z., Xu, Z., You, A., and Bai, X. (2020b). Semantically
multi-modal image synthesis. In CVPR.
APPENDIX
In the experimental evaluation, we intentionally omit
GAN metrics as they have important biases for two
reasons we explain now. First, our method leverages
only local domains translation while standard i2i ap-
plies a global transformation. Second, while we lever-
age high-level domain priors about local domains, we
do not use any target images unlike standard i2i.
For completeness we still report GAN met-
rics against CycleGAN (Zhu et al., 2017a)
and CycleGAN-15, which are trained on
ACDC
clear
7→ ACDC
snow
using respectively 400/400
or 400/15 source/target images. Comparatively,
we only use the same 15 cherry picked ACDC
snow
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
188

Table 6: Snow translation similarity on ACDC
snow
. GAN
metrics on the snow addition task confirm the validity of our
model. Without using any target images, our model yields
acceptable results on FID, attaining even almost on-par per-
formances with baselines on LPIPS.
Network Training samples FID↓ LPIPS↓
clear snow
CycleGAN 400 400 110.30 0.6225
CycleGAN-15 400 15 111.29 0.6271
Ours 0 15 123.14 0.6283
images. The quantitative evaluation is obtained
by performing roads and sidewalks translation of
100 ACDC
clear
images relying on segmentation
masks from OCRNet (Yuan et al., 2020) pretrained
on Cityscapes (Cordts et al., 2016). Since ACDC
provides images (weakly) paired, we compute the
pair-wise average LPIPS metric between each fake
translation and its paired real snow image. We
also evaluate FID between the fake and real snow
datasets. It is important to note that we do not
seek to outperform the baselines since they have
access to ACDC
clear
images while our method does
not. Results in Tab. 6 however show we perform
reasonably good given the additional domain gap,
even on par with baselines on LPIPS metric.
Leveraging Local Domains for Image-to-Image Translation
189
