
Passenger’s Comfort Recognition during Autonomous Navigation of
Personal Mobility Vehicles in Crowded Pedestrian Spaces
Yosuke Isono, Hiroshi Yoshitake and Motoki Shino
Department of Human and Engineered Environmental Studies, Graduate School of Frontier Sciences,
The University of Tokyo, 5-1-5 Kashiwanoha, Kashiwa, Chiba, Japan
Keywords:
Comfort Recognition, Situation Awareness, Autonomous Navigation, Personal Mobility Vehicle.
Abstract:
The development of autonomous navigation systems for personal mobility vehicles is underway to support
mobility in large-scale facilities such as airports and shopping malls where pedestrians coexist. One of the
required functions of autonomous navigation is comfort, such as not causing anxiety to the passengers. The
purpose of this study is to clarify the characteristics of passenger’s comfort recognition, that is, how the
passenger feels comfortable depending on the behavior of the surrounding pedestrians and the vehicle when the
personal mobility vehicle moves autonomously in a crowded environment. An experiment was conducted to
obtain subjective assessment of passenger comfort using a VR simulator. By focusing on situation awareness
as a process affecting passenger’s comfort recognition, the influence of situation awareness on passenger’s
comfort recognition was analyzed and the characteristics of passenger’s comfort recognition were discussed.
1 INTRODUCTION
The population of older adults in Japan is increas-
ing year after year, and both the number of people
with physical disabilities and the number of people
with dementia are increasing. To support the mobility
of older adults, there is a growing need not only for
outdoor mobility support using public transportation
and shared-ride services, but also for indoor mobil-
ity support after arriving at a destination due to the
increasing scale of facilities. Currently, most mobil-
ity support services at airports and other largescale
facilities rely on manual labor (e.g., a facility staff
pushing a wheelchair). However, the development
of autonomous navigation systems of personal mobil-
ity vehicles (PMVs) such as electric wheelchairs is in
progress and it is expected to reduce labor shortages
and labor costs (Leaman and La, 2017).
A PMV drives through the pedestrian space,
which is a mixed space with pedestrians and PMVs.
Autonomous navigation systems of PMVs are re-
quired to be able to carry the passenger to a des-
ignated destination, be safe and free from collisions
with static objects and pedestrians, and be comfort-
able without causing anxiety to the passenger. In our
research, we aim to realize an autonomous navigation
system of a PMV that is comfortable for passengers
and can be used in large-scale facilities (e.g., airports
and shopping malls).
Research on passenger comfort in autonomous
navigation of PMVs can be roughly divided into two
types: research focusing on ride comfort and re-
search focusing on a sense of security. As for the
former type, International Organization for Standard-
ization has established evaluation criteria of accelera-
tion applied to seated human beings (ISO, 1997), and
there are researches on methods generating smooth
paths using vehicle acceleration and jerk as indicators
(Bevilacqua et al., 2016; Yoshitake et al., 2020). In
terms of the latter type, the concept of personal space,
which is the space in which people feel uncomfortable
with the presence of others, has been studied (Hall,
1966). Personal space is perceived as an elliptical area
with a long axis in front of oneself. Pham et al. inves-
tigated the discomfort of PMV passengers by focus-
ing on the degree of invasion of others into the per-
sonal space (Pham et al., 2015). As methods for gen-
erating comfortable paths, there are researches focus-
ing on static environments where there are no pedes-
trians (Morales et al., 2013; Morales et al., 2018) and
dynamic environments when passing by pedestrians
(Morales et al., 2017). In our research, the acceler-
ation and jerk of the PMV are kept to a level that
does not impair the ride comfort of passengers, and
the sense of security is focused on as passenger com-
fort.
58
Isono, Y., Yoshitake, H. and Shino, M.
Passenger’s Comfort Recognition during Autonomous Navigation of Personal Mobility Vehicles in Crowded Pedestrian Spaces.
DOI: 10.5220/0010849700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 2: HUCAPP, pages
58-67
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The comfortable autonomous navigation methods
avoiding obstacles and passing by pedestrians pro-
posed in previous research assumes situations where
the PMV can take enough distance from obstacles
and pedestrians. However, in large-scale facilities
such as airports and shopping malls, many pedestri-
ans exist at the same time. When the environment is
crowded (i.e., with pedestrians above a certain den-
sity), pedestrians will inevitably invade the personal
space of the PMV passenger. It is known that passen-
gers feel uncomfortable when pedestrians invade their
personal space. However, characteristics of comfort
recognition in a crowded environment where the sur-
rounding situation changes from time to time and
the personal space being inevitably invaded have not
been discussed. By investigating these characteristics
of passenger’s comfort recognition, it is expected to
lead to novel autonomous navigation methods that re-
duce discomfort while allowing pedestrians to invade
the passenger’s personal space in a crowded environ-
ment. Therefore, the purpose of this study is to clarify
the characteristics of passenger’s comfort recognition,
that is, how the passenger feels comfortable depend-
ing on the behavior of the surrounding pedestrians
and the PMV when the PMV moves autonomously in
a crowded environment. To obtain fundamental data
as an exploratory study aimed at finding factors that
constitute passengers’ comfort recognition, the exper-
iment was conducted on young participants following
previous research(Gwak et al., 2021), although older
people use PMVs more than healthy people. This
study deals with a mobility scooter as a form of the
PMV.
2 PROCESS OF PASSENGER’S
COMFORT RECOGNITION
The driving behavior process of a PMV driver in a
crowded environment was focused on to consider the
passenger’s comfort recognition process during au-
tonomous navigation in a similar environment. In
a crowded environment, the driver understands the
state of pedestrians from their behavior and posture
and selects his/her action according to the state. This
method can be thought of as selecting a less uncom-
fortable action even in situations where pedestrians’
invasion into the personal space is unavoidable. This
process of recognition and judgment in the driver be-
havior matches with the situation awareness model
of Endsley (Endsley, 1995). In Endsley’s situation
awareness model, information processing consists of
situation awareness, decision, and performance of ac-
tions. Moreover, the process of situation awareness
COMFORT
RECOGNITION
Comfort
Passenger
Environment
Comprehension
of Current
Situation
Level 2
Projection
of Future
Status
Level 3
Perception
of Elements
in Current
Situation
Level 1
SITUATION AWARENESS
Pedestrian
Obstacle
Vehicle
Figure 1: Process of passenger’s comfort recognition based
on the situation awareness.
consists of the following three stages:
• Level 1: Perception of the Elements in the Current
Situation.
• Level 2: Comprehension of the Current Situation.
• Level 3: Projection of the Future Status.
This indicates that in recognizing the environment, it
is necessary not only to perceive the shapes and posi-
tions of objects (Level 1), but also to understand what
their positional relationships and movements mean to
oneself (Level 2), and to predict what the future sta-
tus may be from the current situation (Level 3). In
addition, recognition is affected by task- and system-
side factors such as the characteristics of the vehicle
or system being used, as well as personal factors such
as memory, goals, and expectations that depend on the
personal ability and experience.
When focusing on autonomous navigation, the
stage of performance of actions that existed dur-
ing manual driving is no longer present. However,
the passenger can be considered to perceive the sur-
rounding environment and recognize comfort (i.e.,
feel comfortable or uncomfortable) as a result of the
situation awareness stage in place of the decision
stage. Therefore, the passenger’s comfort recogni-
tion process in this study is expressed with the situ-
ation awareness stage, as shown in Figure 1. In other
words, the passenger recognizes comfort based on the
results of situation awareness using elements of the
surrounding environment such as pedestrians, obsta-
cles, and the autonomous PMV as input information.
To understand the characteristics of comfort
recognition, the relationships between situation
awareness and passenger comfort are examined in
this study. First, an experiment is conducted to
obtain passenger’s subjective assessment of comfort
when the PMV moves autonomously in the target
crowded environment. The effect of the Current Sit-
uation and the Future Status in situation awareness
on comfort recognition is analyzed using the obtained
data. Finally, the characteristics of passenger’s com-
fort recognition are discussed considering the analysis
results.
Passenger’s Comfort Recognition during Autonomous Navigation of Personal Mobility Vehicles in Crowded Pedestrian Spaces
59

3 PASSENGER COMFORT
EVALUATION EXPERIMENT
The purpose of this experiment is to evaluate how pas-
sengers recognize comfort during autonomous navi-
gation of PMVs in the target crowded environment.
The requirement of the experiment is to be able to
evaluate the passenger’s comfort quantitatively to en-
able an analysis of the relationship between passenger
comfort and situation awareness.
The experiment was done with a virtual reality
(VR) simulator. Scenes with different autonomous
movement of a PMV and pedestrians’ behavior in the
target crowded environment are simulated in a VR en-
vironment and presented to the participants using a
head-mounted display (HMD). In addition, the pas-
senger’s degree of discomfort is obtained along the
time axis. A VR simulator was adopted in this exper-
iment for two reasons. First, the simulator can control
the behavior of the PMV and pedestrians easily and
repeatedly, where this is difficult in the real world.
Second, the simulator is free from actual collisions
where there is a possibility of collisions between the
autonomous PMV and pedestrians in the real world.
3.1 Scene Conditions
To present scenes with different behavior of the au-
tonomous PMV and pedestrians to participants in
a VR environment, the behavior of both the au-
tonomous PMV and pedestrians in a crowded envi-
ronment was simulated numerically. The environ-
ment is a 6-meter-wide aisle in a shopping mall.
There are 30 pedestrians approaching the PMV and
the pedestrian density of the environment is approxi-
mately 0.125 /m
2
. The pedestrians follow the Social
Force Model (Zanlungo et al., 2011), and the initial
position, target speed, and destination are set indi-
vidually. The autonomous navigation method of the
PMV in the simulation is based on the Dynamic Win-
dow Approach (Fox et al., 1997), which is a widely
used method in the field of robotics. The method
also takes into account the movement of surround-
ing pedestrians to perform avoidance actions (Guan
et al., 2018). The numerical simulation was con-
ducted assuming that pedestrians within the measure-
ment range could be recognized accurately and that
there was no skidding of the PMV. Under these con-
ditions, 16 scenes with different behaviors of pedes-
trians and the autonomous PMV were simulated.
Figure 2: Image inside head-mounted display.
Lever
Figure 3: Experiment setup.
3.2 Equipment and Methods
The created scenes were simulated in a VR environ-
ment using Unity and presented to the participants
using VIVE Pro Eye (HTC Corporation). A sample
view of the VR environment created based on the sim-
ulation is shown in Figure 2. As for the experimen-
tal environment, the participants sat in a real mobility
scooter and wore an HMD, as shown in Figure 3. The
mobility scooter’s motor was rotated according to the
speed of the PMV inside the VR environment with-
out moving the actual PMV to increase the sense of
realism. As a method of obtaining passenger com-
fort quantitatively and continuosly, the degree of dis-
comfort was obtained in real time as an analog scale
instead of a Likert scale. The lever on the handle in-
dicated by the red circle in Figure 3 was used. The
participants were asked to input their degree of dis-
comfort with the lever on an analog scale from 0 to 1,
where 1 is the most uncomfortable moment.
The participants first experienced all 16 scenes
without evaluating their discomfort. This process was
set to enable the participants to become familiar with
the equipment and the behavior of pedestrians and
the autonomous PMV. In addition, this process let the
participants to define their own standard of discom-
fort during autonomous navigation. The discomfort
was then obtained using the method described above.
Each of the 16 scenes was played in a random order
to remove the order effects.
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
60
3.3 Participants
The experiment was conducted on healthy young par-
ticipants to ensure fundamental data as an exploratory
study. Ten males in their 20s (23.0 ± 0.77 years
old) participated in this experiment. The experimen-
tal procedures and details of the experiment were ex-
plained to the participants before the experiment, and
informed consent was obtained. The experiment was
conducted under the approval of the Ethics Commit-
tee of the University of Tokyo.
4 EFFECTS OF CURRENT
SITUATION ON COMFORT
RECOGNITION
In this chapter, the effect of the Current Situation,
which corresponds to Level 1 and 2 of situation
awareness in Endsley’s model, on the passenger’s
comfort recognition is analyzed. Here, it is said in
the previous study (Hall, 1966) that people feel un-
comfortable when others invade their personal space.
This phenomenon corresponds to the Current Situa-
tion. Therefore, the invasion of surrounding pedes-
trians into the personal space of the PMV passenger
is used as a cue for the analysis. First, the relation-
ship between the sections where the passenger feels
uncomfortable and the sections where the personal
space is invaded is investigated. Second, the relation-
ship between the degree of discomfort and the degree
of invasion is investigated.
4.1 Analysis of Uncomfortable Sections
4.1.1 Method
When identifying an uncomfortable section, it can be
considered that the discomfort of a certain section is
higher when more participants input discomfort at the
section. Therefore, the number of participants who
input discomfort was counted along the time axis for
each scene. The section where there is discomfort in-
put of two or more participants is defined as the ”un-
comfortable section.”
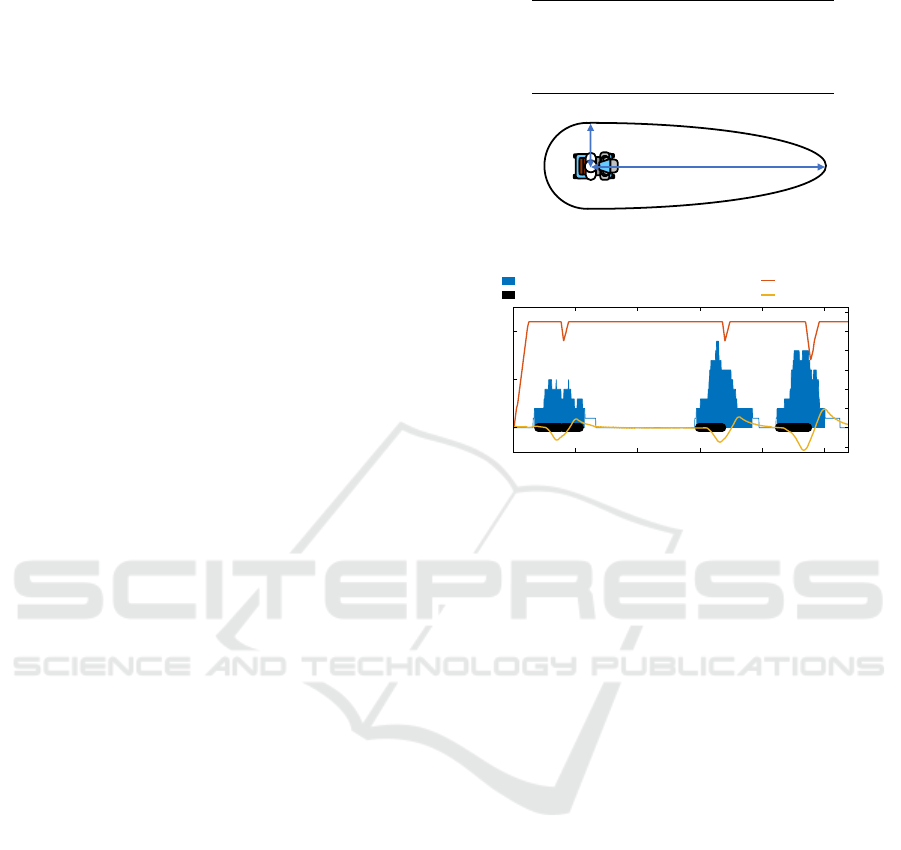
The size of the vehicle and the personal space is
shown in Table 1. The size of the personal space was
calculated by considering the difference in the size of
the vehicle dealt with in the previous study (Pham
et al., 2015). The personal space has an oval shape,
as shown in Figure 4, with the passenger’s head at the
center, an ellipse with the major axis l
f
in the front
and the minor axis l
s
in the side, and a circle with the
Table 1: Size of vehicle and personal space.
Vehicle length 1.19 m
Vehicle width 0.65 m
Front personal space (l
f
) 5.62 m
Side personal space (l
s
) 0.80 m
𝑙
!
𝑙
"
Figure 4: Size of personal space.
0 5 10 15 20 25
Time [s]
0
5
10
Number of participants feeling
uncomfortable [-]
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Vehicle speed [m/s]
Steering angle [rad]
Number of participants feeling uncomfortable
Section where pedestrians invade personal space
Vehicle speed
Steering angle
Figure 5: Changes in the number of participants feeling un-
comfortable (Scene No. 3).
radius l
s
in the rear.
4.1.2 Result
Figure 5 shows the number of participants inputting
discomfort in a certain scene, along with the vehicle
speed and steering angle at that time. In Figure 5, the
section where pedestrians invade the personal space is
filled in black. From Figure 5, it can be seen that the
timing of the discomfort input of the participants is
greatly influenced by the presence of pedestrians in-
vading the personal space of PMV passengers. The
uncomfortable section is the area filled in blue in Fig-
ure 5. Among the 16 scenes, there were 46 uncom-
fortable sections, and 41 of these overlapped with sec-
tions where pedestrians were invading the personal
space. As for the remaining five sections, there were
no pedestrians invading the personal space. However,
there were pedestrians near the personal space. From
the results, it was found that the presence of pedestri-
ans invading the personal space has a significant im-
pact on the passenger’s discomfort. This is in line
with the results of previous studies.
Passenger’s Comfort Recognition during Autonomous Navigation of Personal Mobility Vehicles in Crowded Pedestrian Spaces
61

4.2 Analysis of Degree of Discomfort
4.2.1 Method
The results of the previous section indicated that the
presence of pedestrians invading the personal space
has a significant impact on the passenger’s discom-
fort. In this section, the quantitative relationship be-
tween the invasion of pedestrians into the personal
space and the passenger’s discomfort is analyzed.
As a quantitative index for pedestrian’s invasion
into the personal space of a PMV passenger, the inva-
sion ratio, which has been used in the previous study
(Pham et al., 2015), is adopted. The invasion ratio is a
physical index that expresses the extent to which the
personal space of a pedestrian is invaded, as shown in
Figure 6. The invasion ratio I is expressed as
I =
l
b
l
a
. (1)
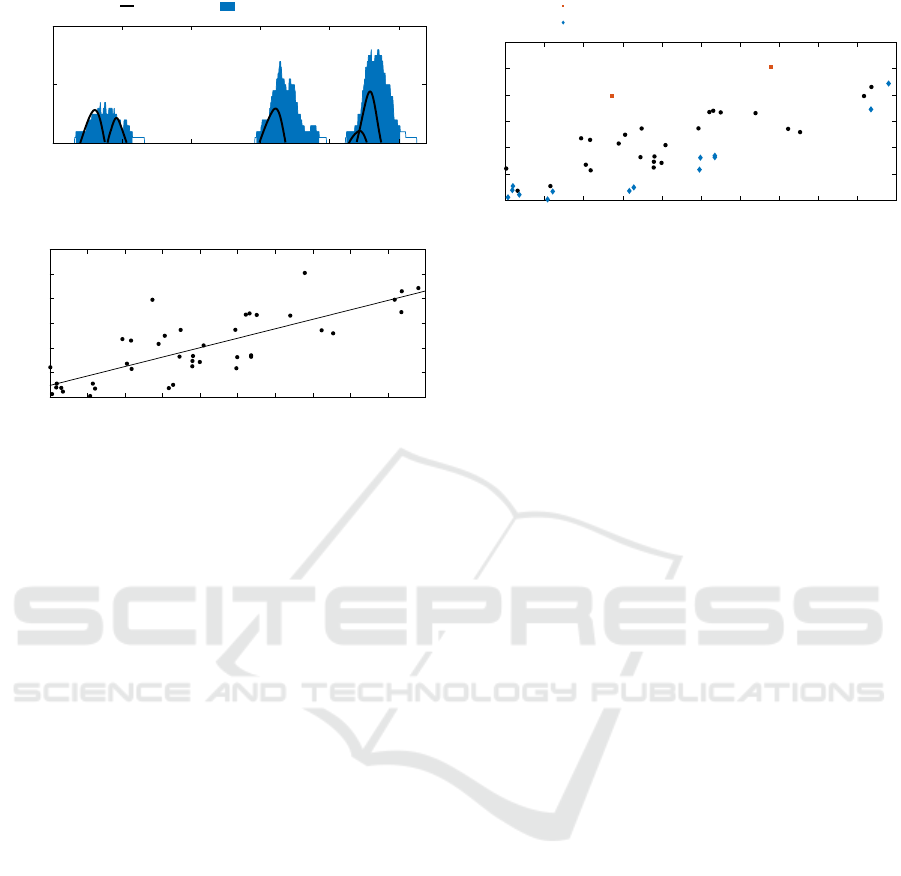
Next, the discomfort of the passengers is quanti-
fied. As mentioned in the previous section, it is con-
sidered that the discomfort is higher when more par-
ticipants input discomfort at the same time. In addi-
tion, the larger the input value of discomfort is, the
more the participants feel uncomfortable. Figure 7
shows the frequency distribution of discomfort input
values on an analog scale among all 16 scenes for two
different participants. As it can be seen from the fig-
ures, there was a large individual difference in the in-
put characteristics of discomfort among the partici-
pants. Thus, it is inappropriate to use the input val-
ues of discomfort on the analog scale as a quantifica-
tion index of discomfort directly. Therefore, the input
value of discomfort was corrected as follows accord-
ing to the input characteristics of each individual:
q
0
=
0 (q = 0),
0.5 (0 < q ≤ q
median
),
1 (q
median
< q ≤ 1),
(2)
where q is the input discomfort value, q
0
is the cor-
rected discomfort value, and q
median
is the median of
the frequency distribution of all input values for each
individual. The value
¯
q
0
, which is the average value of
all the participants, is used as a quantitative index of
passenger discomfort along the time axis. The quan-
titative time trends of pedestrian invasion ratio and
passenger discomfort are shown in Figure 8 using the
above indices.
In analyzing the relationship of passenger discom-
fort in response to pedestrian invasion ratio, this rela-
tionship was investigated by focusing on the uncom-
fortable sections. As a measure of pedestrian invasion
into the personal space during a certain section, the
𝑙
!
𝑙
"
Figure 6: Definition of invasion ratio.
𝑞
!"#$%&
(a) Participant ID 1.
𝑞
!"#$%&
(b) Participant ID 2.
Figure 7: Examples of input characteristics of degree of dis-
comfort.
time integration of the invasion ratio for all the pedes-
trians who invaded the personal space was adopted.
I
invasion ratio
represents the invasion of pedestrians into
the personal space for a certain section which is ex-
pressed as
I
invasion ratio
=
∑
j∈S
Z
I
j
(t)>0
I
j
(t)dt, (3)
where S is the set of pedestrians who invaded the
personal space in the section of interest, and I
j
(t) is
the instantaneous value of the invasion ratio of pedes-
trian j. As an index of passenger’s discomfort during
a certain section, the time integration of the passen-
ger’s discomfort
¯
q
0
was adopted. The time integration
was adopted because this discomfort is considered to
be stronger when the input value is larger and the in-
put time is longer. I
passenger
discom f ort
represents the
passenger’s discomfort for a certain section which is
expressed as
I
passenger discom f ort
=
Z
t
2
t
1
¯
q
0
(t)dt, (4)
where t
1
and t
2
are the start and end times of the un-
comfortable section.
4.2.2 Result
Figure 9 shows the relationship between the pedes-
trian invasion into the personal space and the passen-
ger’s discomfort for the 41 uncomfortable sections.
The coefficient of determination for the linear approx-
imation was near 0.6. This indicates that the inva-
sion ratio of pedestrians into the personal space is an
important factor in evaluating passenger’s discomfort
quantitatively.
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
62
0 5 10 15 20 25
Time [s]
0
0.5
1
Invasion ratio [-]
Passenger discomfort [-]
Invasion ratio Passenger discomfort
Figure 8: Trends in invasion ratio and passenger discomfort
(Scene No. 3).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Invasion ratio for a section [-]
0
0.5
1
1.5
2
2.5
3
Passenger discomfort
for a section [-]
Figure 9: Correlation between invasion ratio and passenger
discomfort for each section.
4.2.3 Discussion
The results in the previous section showed that there
was a strong relationship between the invasion ra-
tio of pedestrians and passenger’s discomfort. How-
ever, there were sections that showed a rather weak
relationship, such as the sections apart from the lin-
ear approximation line. These sections were further
analyzed and two factors affecting passenger’s dis-
comfort were identified. The first factor was that the
vehicle was approaching the wall. There were two
sections where the PMV was approaching the wall,
and these sections were relatively uncomfortable, as
shown in Figure 10. This result was inconsistent with
the previous study (Morales et al., 2013), where peo-
ple felt uncomfortable when the distance from the
wall was close. The second factor was that the pedes-
trian invades the personal space within 5.0 s after the
scene starts. Fourteen sections, which were around
the start of the scene, were relatively comfortable sit-
uations, as shown in Figure 10. Immediately after the
scene starts, both the vehicle and the pedestrian begin
to accelerate from a stopping state. It is assumed that
the sensitivity of the passenger’s discomfort against
pedestrian invasion was low before reaching a steady-
state, and this led to the evaluation of a relatively com-
fortable section.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Invasion ratio for a section [-]
0
0.5
1
1.5
2
2.5
3
Passenger discomfort for a section [-]
Situation approaching the wall
Situation immediately after the start of the scene
Figure 10: Sections that showed a rather weak relationship.
5 EFFECTS OF FUTURE STATUS
ON COMFORT RECOGNITION
In this chapter, the effect of the Future Status, which
corresponds to Level 3 of situation awareness in End-
sley’s model, on the passenger’s comfort recogni-
tion is analyzed. The results of the previous chap-
ter showed that the invasion into the personal space
has a great impact on comfort recognition as a fac-
tor of the Current Situation. In this chapter, the sta-
tus before the pedestrian’s invasion into the personal
space (pre-invasion status) is focused on as the Fu-
ture Status, and the effect on the passenger’s comfort
recognition is analyzed. First, pre-invasion statuses
that affect comfort recognition are extracted by com-
paring the pre-invasion statuses among the relatively
comfortable and uncomfortable sections. Second, the
effect of the extracted pre-invasion status is examined
quantitively.
5.1 Comparison of Pre-invasion
Statuses
5.1.1 Method
To extract the pre-invasion status that affects passen-
ger’s comfort recognition, the relationship between
the invasion ratio and the passenger discomfort, as
discussed in the previous chapter, was analyzed by
focusing on the scenes that became relatively un-
comfortable and relatively comfortable in response to
the invasion ratio. As a method of classifying rela-
tively uncomfortable and relatively comfortable sec-
tions, the 25 uncomfortable sections, which were not
influenced by the wall or the start of the scene, are lin-
early approximated and the sections that fall outside
of the 50% prediction intervals were defined as rel-
atively uncomfortable or relatively comfortable sec-
tions. The characteristics of the pre-invasion status of
these sections are analyzed qualitatively.
Passenger’s Comfort Recognition during Autonomous Navigation of Personal Mobility Vehicles in Crowded Pedestrian Spaces
63
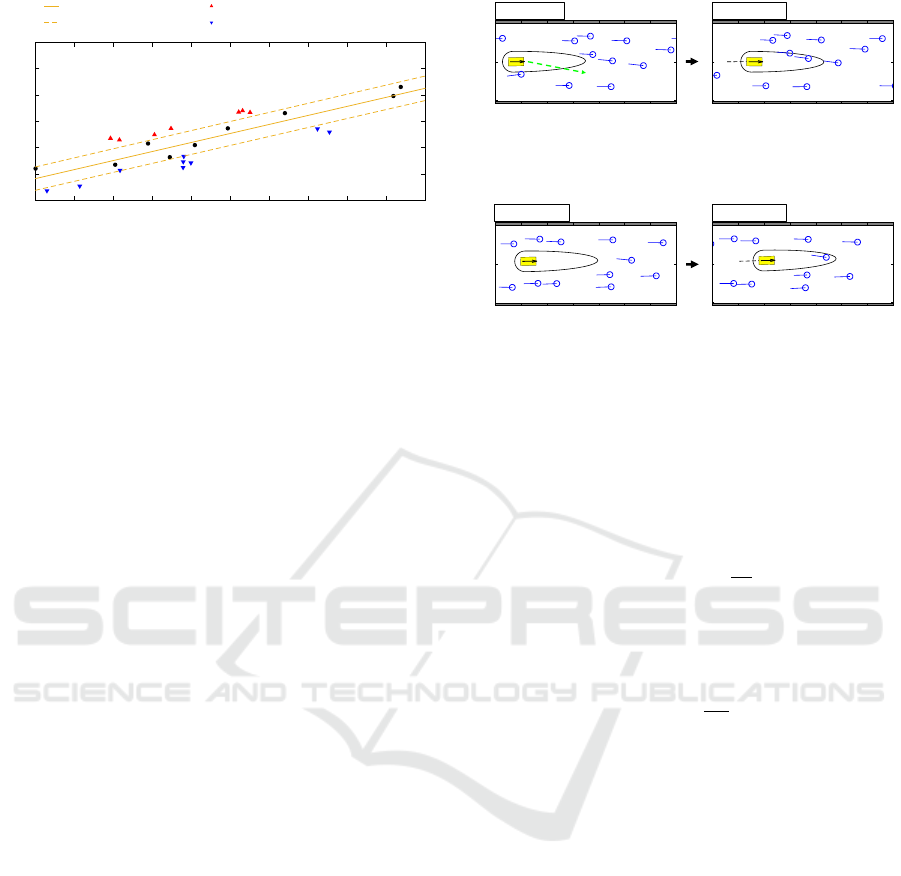
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Invasion ratio for a section [-]
0
0.5
1
1.5
2
2.5
3
Passenger discomfort for a section [-]
Fitted line
50% prediction intervals
Relatively uncomfortable situation
Relatively comfortable situation
Figure 11: Classification into relatively uncomfortable and
relatively comfortable situations.
5.1.2 Result
Figure 11 shows the relationship between the inva-
sion ratio and the passenger discomfort for the 25 sec-
tions, excluding the 16 sections where factors other
than pedestrians were involved, and shows the linear
approximation line and the 50% prediction intervals.
Comparison of two classified section groups showed
that for the sections classified as relatively uncomfort-
able, the autonomous PMVs did not avoid the pedes-
trians even though there was enough space to avoid
them. Figure 12-(a) shows an example of the situation
where the vehicle could have avoided the pedestrian
but did not do so. In contrast, Figure 12-(b) shows
an example of a situation where the vehicle could not
avoid the pedestrian in the first place. From this, the
pre-invasion status that a vehicle did not avoid pedes-
trians although it could was extracted as a status that
leads to passenger discomfort. The difference be-
tween the current status of the vehicle, which is not
taking any avoidance action, and the passenger’s ex-
pectation, which is that the vehicle would take an
avoidance action, is considered to have an effect on
comfort recognition.
5.2 Examination of Effects of
Pre-invasion Status on Comfort
Recognition
In this section, the effect of the pre-invasion status ex-
tracted in the previous section on passenger discom-
fort is examined quantitatively.
5.2.1 Method
To examine the effect of the pre-invasion status, two
factors are quantified: whether the vehicle is taking
an avoidance action and whether the vehicle can avoid
the pedestrians.
Time = 9.0 [s] Time = 10.5 [s]
(a) Situation where the vehicle could have avoided the
pedestrian but did not take any avoidance action (Scene
No. 1).
Time = 13.5 [s] Time = 15.0 [s]
(b) Situation where the vehicle could not avoid the pedes-
trian in the first place (Scene No. 10).
Figure 12: Comparison of the ability to avoid pedestrians.
First, whether the vehicle is taking avoidance ac-
tions or not is quantified. A vehicle is considered to
be taking an avoidance action if it is decelerating or
turning. Thus, the criteria for deceleration action are
set as follows:
v ≤ 0.9v
max
∧
∆v
∆t
≤ 0, (5)
where v is the vehicle speed and v
max
is the maximum
vehicle speed. The criteria for turning action are set
as follows:
|α| ≥ 2 ∨
∆α
∆t
≥ 2.5, (6)
where α [degree] is the steering angle. A vehicle is
considered to be taking avoidance action when it sat-
isfies (5) or (6).
Next, whether the vehicle can avoid the pedes-
trians or not is quantified. A vehicle is considered
to be able to avoid pedestrians if it can travel for a
longer time without approaching pedestrians or walls
by steering the vehicle. Therefore, the focus is on
the time duration the vehicle can continue traveling
without approaching pedestrians or walls, both when
the vehicle continues traveling at the current steering
angle and when the steering angle is changed from
that angle. Whether or not the vehicle can continue
to travel for several seconds is a future phenomenon,
and thus requires a prediction process. The follow-
ing describes the method of quantification based on
the prediction process. As a prediction process in this
study, the vehicle motion is assumed to follow the ve-
hicle model and the pedestrian position is assumed to
have a probabilistic distribution. The probability dis-
tribution of the pedestrian is a bivariate normal dis-
tribution centered on the position of constant velocity
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
64
8 10 12 14 16 18 20 22 24
Longitudinal position [m]
-3
0
3
Lateral position [m]
Path (max length) Path (by current steering angle)
Figure 13: Difference in the length of the path that can be
drawn by different steering angles (Scene No. 1).
linear motion, and the variance is calculated from the
actual position error in the scenes. First, the probabil-
ity p
n
of any pedestrian invading the personal space
of the vehicle after n steps is determined using the
method of previous research (Lambert et al., 2008).
Here, pedestrians are limited to a range of 15 m from
the vehicle, and the time per step is ∆t = 0.5 s. In this
case, the probability q
n
that the vehicle can continue
traveling in n steps without approaching pedestrians
is expressed as
q
n
=
n
∏
i=1
(1 − p
i
)
!
p
n+1
. (7)
At this time, the expected value T of the time that
the vehicle can continue driving without approaching
pedestrians is expressed as
T = ∆t
∑
i
iq
i
. (8)
The above process is applied to the case where the ve-
hicle continues to travel at the current steering angle
and to the cases where the steering angle is changed
from the current angle. The steering angle is varied
in increments of 0.5
◦
over a range of ±3
◦
. Figure 13
shows an example of the difference in the length of the
path that the vehicle can continue to travel without ap-
proaching pedestrians or walls. If the vehicle contin-
ues to move at the current steering angle, a pedestrian
will invade the personal space a few seconds ahead.
However, if the steering angle is turned to the right,
a longer path can be drawn without the pedestrian in-
vading the personal space.
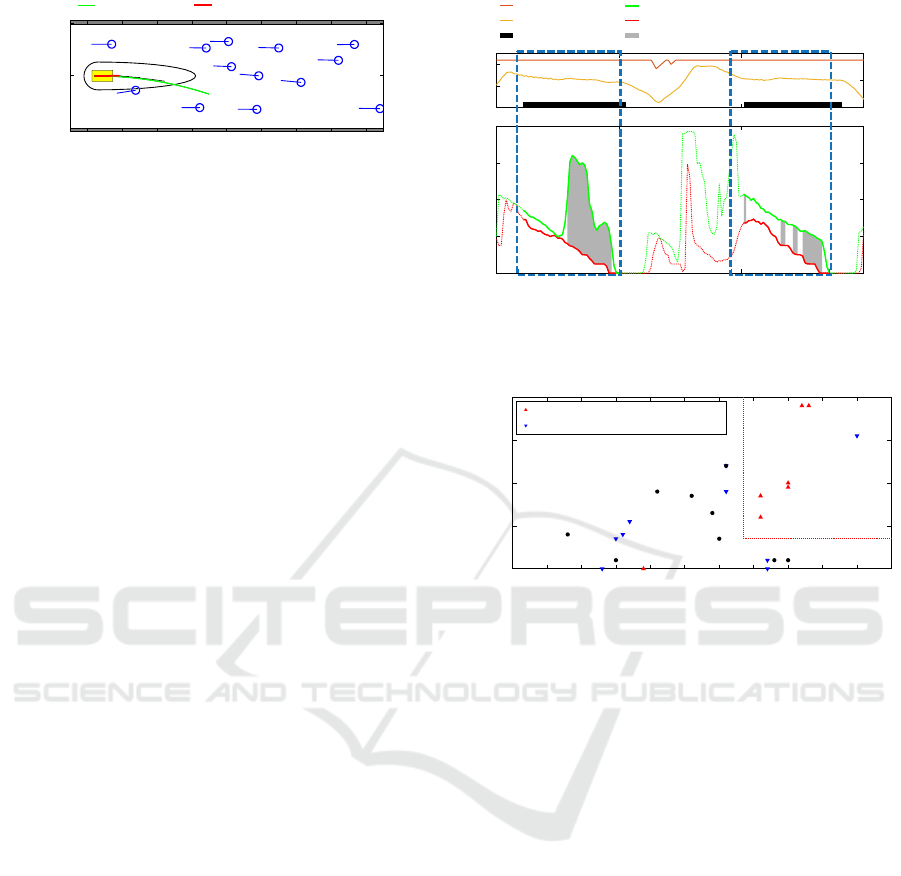
Using the above indices, Figure 14 shows the sec-
tions where the vehicle is not taking any avoidance
action and the sections where the vehicle is not taking
any avoidance action despite being able to avoid the
pedestrian, respectively. Here, the criterion for being
able to avoid pedestrians is defined as the case where
changing the steering angle from the current value in-
creases the travel time T by 1.3 s or more. In Fig-
ure 14, the section surrounded by the blue dotted line
indicates the section until the pedestrian invades the
personal space for the uncomfortable section.
0
1
Vehicle speed [m/s]
-10
0
10
Steering angle [degree]
Vehicle speed
Steering angle
Section not avoiding
Travelable time (max length)
Travelable time (by current steering angle)
Section able to avoid but not avoiding
5 10 15 20
Time [s]
0
2
4
6
8
Travelable time [s]
Figure 14: Sections where the vehicle is not avoiding and
the sections where the vehicle is able to avoid but not avoid-
ing (Scene No. 1).
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5
Length of time not avoiding [s]
0
1
2
3
4
Length of time able to avoid
but not avoiding [s]
Relatively uncomfortable situation
Relatively comfortable situation
Figure 15: Classification based on the length of time that
the vehicle is not avoiding and the length of time that the
vehicle is able to avoid but not avoiding.
5.2.2 Result
Based on the above process, Figure 15 shows the
length of time that the vehicle is not avoiding on the
horizontal axis and the length of time that the vehicle
is able to avoid but not avoiding on the vertical axis
for the 25 uncomfortable sections. In Figure 15, if the
horizontal axis is greater than 3.35 s and the vertical
axis is greater than 0.7 s, six sections can be classified
correctly (recall = 0.85) among the relatively uncom-
fortable sections. Conversely, one section is misclas-
sified (precision = 0.85). Therefore, by focusing on
whether the vehicle is taking avoidance actions and
whether the vehicle can avoid the pedestrians before
invading the personal space, it is possible to explain
the scenes that became relatively uncomfortable for
the invasion ratio. On the other hand, in response
to the pre-invasion status that a vehicle did not avoid
pedestrians although it could and it leads to passenger
discomfort, it was found that there is a condition that
the status continues for a certain amount of time.
Passenger’s Comfort Recognition during Autonomous Navigation of Personal Mobility Vehicles in Crowded Pedestrian Spaces
65

5.2.3 Discussion
The first condition on the horizontal axis (the length
of time that the vehicle is not avoiding is more than
3.35 s) suggests that when there is a pedestrian who
may invade the personal space in the future, if the
vehicle does not take avoidance action for a cer-
tain time period and the status continues, the passen-
ger’s awareness toward the pedestrian will become
stronger. As a result, the sensitivity of discomfort
to invasion into the personal space is expected to in-
crease. The second condition on the vertical axis (the
length of time that the vehicle is able to avoid but not
avoiding is more than 0.7 s) suggests that when there
is a threat of invading the personal space for a long
time, if the vehicle does not take appropriate avoid-
ance action when avoidance is possible, it will lead
to stronger discomfort. On the other hand, when it is
known that avoidance is not possible, the discomfort
can be suppressed to a reasonable level.
6 CHARACTERISTICS OF
PASSENGER’S COMFORT
RECOGNITION
The characteristics of passenger’s comfort recogni-
tion are summarized based on the previous discus-
sions. As described in Chapter 2, situation awareness
was focused on as a process that affects passenger’s
comfort recognition in this study. As a result of ana-
lyzing the effect of the Current Situation in situation
awareness on comfort recognition, the invasion ratio
of pedestrians into the personal space had a significant
impact on the passenger’s discomfort, similar to pre-
vious research results. This suggests that recognition
of the current state of the surrounding environment
is included, and that one of the outputs of the cur-
rent state recognition, the invasion ratio into the per-
sonal space, is an input for the comfort recognition.
Next, as a result of analyzing the effect of the Fu-
ture Status in situation awareness on comfort recog-
nition, the discomfort becomes stronger when a PMV
does not take any actions even though it can avoid
approaching pedestrians that may invade the personal
space in the near future, and when this status contin-
ues for a certain time period. This suggests that pas-
sengers have some expectations of the PMV’s behav-
ior, and that when these expectations differ from the
actual behavior, it leads to stronger discomfort. More-
over, the difference between actual and expected be-
havior does not immediately strengthen discomfort,
but it does after a certain time. The expected behav-
ior of an autonomous PMV in a crowded environment
is to take appropriate action after determining where
it can travel to avoid approaching pedestrians. From
this process, it is considered that the prediction of
pedestrian behavior and the judgment of avoidability
based on the prediction are included as elements of
the model. The difference between the expectations
generated by this process and the actual behavior ap-
pears as an increase in the weighting factor of dis-
comfort based on the invasion ratio into the personal
space described earlier. Furthermore, this weighting
factor is assumed to be updated over time. Based
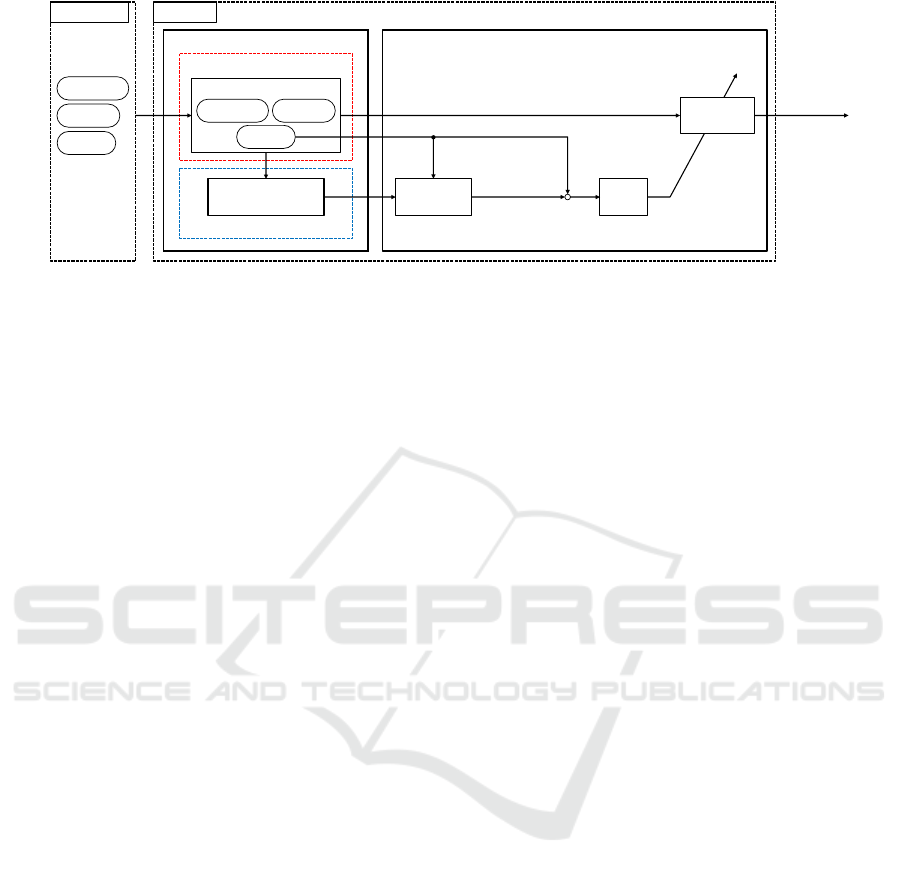
on the above discussions, the characteristics of pas-
senger’s comfort recognition are summarized in Fig-
ure 16. Figure 16 is a model of comfort recognition
based on situation awareness, which represents the ef-
fect of the Current Situation and the Future Status in
situation awareness on passenger’s comfort recogni-
tion.
This study has the following limitations. Since the
experiment in this study was conducted in a VR en-
vironment using a head-mounted display, the differ-
ence in the perceived distance from the surrounding
pedestrians and the narrow field of view may have af-
fected the comfort recognition. Moreover, the biased
participants, limited number of participants, and lim-
ited scenes are other limitations of this study. Further
studies on the participants with a balance of gender
and age including the older people, expanded samples
and scenes, and real vehicles should be conducted as
future works to overcome these limitations.
7 CONCLUSIONS
The purpose of this study is to clarify the charac-
teristics of passenger’s comfort recognition, that is,
how the passenger feels comfortable depending on
the behavior of the surrounding pedestrians and the
vehicle when the personal mobility vehicle moves au-
tonomously in a crowded environment. An experi-
ment was conducted to obtain subjective assessment
of passenger comfort using a VR simulator. By fo-
cusing on situation awareness as a process affecting
passenger’s comfort recognition, the influence of sit-
uation awareness on passenger’s comfort recognition
was analyzed and the characteristics of passenger’s
comfort recognition were discussed. The followings
are the findings obtained in this study:
• The invasion ratio of pedestrians into the personal
space has a significant impact on the passenger’s
discomfort.
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
66
Future Status
Current Situation
Discomfort
PassengerEnvironment
Weight
Update
Pedestrian Behavior
Prediction
Judgment of
Avoidability
Expected
Vehicle State
Current
Vehicle State
+
—
Current State Recognition
Invasion Ratio
into Personal Space
SITUATION AWARENESS
COMFORT RECOGNITION
Discomfort
Recognition
Weighting
Factor
Pedestrian
Obstacle
Vehicle
Pedestrian Obstacle
Vehicle
Figure 16: Characteristics of passenger’s comfort recognition.
• Discomfort becomes stronger when a PMV does
not take any actions to avoid approaching pedes-
trians, which will invade the personal space in the
near future, even though it can, and when this sta-
tus continues for a certain time period.
• Passenger’s comfort recognition can be expressed
using the Current Situation and the Future Status
of the situation awareness as inputs.
The experiment conditions and the number of par-
ticipants were limited in this study. Thus, examining
the characteristics of comfort recognition in exper-
iments with more diverse environmental conditions
and larger sample size is our future work. Further-
more, we will propose and develop a comfortable au-
tonomous navigation method based on the character-
istics of passenger’s comfort recognition.
ACKNOWLEDGEMENTS
This paper is based on results obtained from a project
(JPNP18010) commissioned by the New Energy and
Industrial Technology Development Organization.
REFERENCES
Bevilacqua, P., Frego, M., Bertolazzi, E., Fontanelli, D.,
Palopoli, L., and Biral, F. (2016). Path planning max-
imising human comfort for assistive robots. In 2016
IEEE Conference on Control Applications (CCA),
pages 1421–1427. IEEE.
Endsley, M. R. (1995). Toward a theory of situation aware-
ness in dynamic systems. Human factors, 37(1):32–
64.
Fox, D., Burgard, W., and Thrun, S. (1997). The dy-
namic window approach to collision avoidance. IEEE
Robotics & Automation Magazine, 4(1):23–33.
Guan, M., Wen, C., Wei, Z., Ng, C.-L., and Zou, Y. (2018).
A dynamic window approach with collision suppres-
sion cone for avoidance of moving obstacles. In 2018
IEEE 16th International Conference on Industrial In-
formatics (INDIN), pages 337–342. IEEE.
Gwak, J., Yoshitake, H., and Shino, M. (2021). Effects
of visual factors during automated driving of mobil-
ity scooters on user comfort: an exploratory simulator
study. Transportation research part F: traffic psychol-
ogy and behaviour, 81:608–621.
Hall, E. T. (1966). The hidden dimension, volume 609. Gar-
den City, NY: Doubleday.
ISO (1997). Mechanical vibration and shock–evaluation
of human exposure to whole-body vibration–part 1:
General requirements (ISO Standard No. 2631-1).
Lambert, A., Gruyer, D., Pierre, G. S., and Ndjeng, A. N.
(2008). Collision probability assessment for speed
control. In 2008 11th International IEEE Conference
on Intelligent Transportation Systems, pages 1043–
1048.
Leaman, J. and La, H. M. (2017). A comprehensive re-
view of smart wheelchairs: past, present, and fu-
ture. IEEE Transactions on Human-Machine Systems,
47(4):486–499.
Morales, Y., Kallakuri, N., Shinozawa, K., Miyashita, T.,
and Hagita, N. (2013). Human-comfortable navi-
gation for an autonomous robotic wheelchair. In
2013 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 2737–2743. IEEE.
Morales, Y., Miyashita, T., and Hagita, N. (2017). Social
robotic wheelchair centered on passenger and pedes-
trian comfort. Robotics and Autonomous Systems,
87:355–362.
Morales, Y., Watanabe, A., Ferreri, F., Even, J., Shinozawa,
K., and Hagita, N. (2018). Passenger discomfort map
for autonomous navigation in a robotic wheelchair.
Robotics and Autonomous Systems, 103:13–26.
Pham, T. Q., Nakagawa, C., Shintani, A., and Ito, T. (2015).
Evaluation of the effects of a personal mobility ve-
hicle on multiple pedestrians using personal space.
IEEE Transactions on Intelligent Transportation Sys-
tems, 16(4):2028–2037.
Yoshitake, H., Nishi, K., and Shino, M. (2020). Au-
tonomous motion planning in pedestrian space con-
sidering passenger comfort. Journal of Robotics and
Mechatronics, 32(3):580–587.
Zanlungo, F., Ikeda, T., and Kanda, T. (2011). Social force
model with explicit collision prediction. EPL (Euro-
physics Letters), 93(6):68005.
Passenger’s Comfort Recognition during Autonomous Navigation of Personal Mobility Vehicles in Crowded Pedestrian Spaces
67
