
CAM-SegNet: A Context-Aware Dense Material Segmentation Network
for Sparsely Labelled Datasets
Yuwen Heng
a
, Yihong Wu
b
, Srinandan Dasmahapatra and Hansung Kim
c
Vision, Learning and Control Research Group (VLC), School of Electronics and Computer Science (ECS),
University of Southampton, U.K.
Keywords:
Dense Material Segmentation, Material Recognition, Deep Learning, Scene Understanding, Image Segmen-
tation.
Abstract:
Contextual information reduces the uncertainty in the dense material segmentation task to improve segmenta-
tion quality. Typical contextual information includes object, place labels or extracted feature maps by a neural
network. Existing methods typically adopt a pre-trained network to generate contextual feature maps without
fine-tuning since dedicated material datasets do not contain contextual labels. As a consequence, these contex-
tual features may not improve the material segmentation performance. In consideration of this problem, this
paper proposes a hybrid network architecture, the CAM-SegNet, to learn from contextual and material fea-
tures during training jointly without extra contextual labels. The utility of our CAM-SegNet is demonstrated
by guiding the network to learn boundary-related contextual features with the help of a self-training approach.
Experiments show that CAM-SegNet can recognise materials that have similar appearances, achieving an
improvement of 3-20% on accuracy and 6-28% on Mean IoU.
1 INTRODUCTION
The dense material segmentation task aims to recog-
nise the physical material categories (e.g. metal, plas-
tic, stone, etc.) for each pixel in the input image. The
material cues can provide critical information to many
applications. One example is to teach a robot to per-
form actions such as ”cut” with a tool. This action
indicates that the robot should grasp a knife at the
wooden grip and cut with the metal blade (Shrivatsav
et al., 2019). We can also estimate the acoustic prop-
erties (how sound interacts with surroundings (Delany
and Bazley, 1970)) from physical material categories
to synthesise immersive sound with spatial audio re-
flections and reverberation (McDonagh et al., 2018;
Kim et al., 2019; Tang et al., 2020).
One of the main challenges in the dense material
segmentation task is that materials could have a vari-
ety of appearances in different contexts, such as ob-
jects and places (Schwartz and Nishino, 2020). For
example, a metal knife is glossy under bright lighting
condition, but a rusted metal mirror can be dull. In or-
a
https://orcid.org/0000-0003-3793-4811
b
https://orcid.org/0000-0003-3340-2535
c
https://orcid.org/0000-0003-4907-0491
der to achieve high accuracy, an ideal network should
know all possible combinations; thus a large dataset
is necessary. However, the similarity between the ap-
pearances of different materials can make annotation
work challenging. Consequently, material datasets
are often sparsely labelled in terms of the number of
images and the integrity of labelled material regions.
For example, some training set segments in the Lo-
cal Material Database (LMD) (Schwartz and Nishino,
2016; Schwartz and Nishino, 2020) cover only a small
region of the material, as shown in the ground truth
images (in the second column) in Figure 3 and Fig-
ure 4.
As suggested in (Schwartz and Nishino, 2020;
Schwartz and Nishino, 2016), a possible solution is
to train a network with small image patches cropped
from material regions, without contextual cues, to
force the network to learn from the visual properties
of materials. It was also found that extra contextual
information (e.g.object, place labels or feature maps)
can reduce the uncertainty in identifying materials
and increase the segmentation accuracy (Schwartz
and Nishino, 2016; Hu et al., 2011; Sharan et al.,
2013). To efficiently combine contextual and material
features, we propose our Context-Aware Dense Ma-
terial Segmentation Network (CAM-SegNet), which
190
Heng, Y., Wu, Y., Dasmahapatra, S. and Kim, H.
CAM-SegNet: A Context-Aware Dense Material Segmentation Network for Sparsely Labelled Datasets.
DOI: 10.5220/0010853200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
190-201
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

consists of global, local and composite branches. The
global branch is responsible for extracting contextual
features from the full image, while the local branch
is designed to learn the material features from image
patches. Finally, the composite branch produces the
final predictions from merged features. This paper
demonstrates the efficiency of CAM-SegNet by ad-
justing the global branch to extract boundary-related
contextual features with the loss function that mea-
sures the quality of boundaries of generated segments.
Since existing datasets are sparsely labelled, we adopt
a self-training approach to augment the training set
with predicted pseudo labels. The networks are eval-
uated on the sparse LMD test set as well as our dense
LMD (DLMD) test set, which contains eight densely
labelled indoor scene images. Our main contributions
are the following:
• A CAM-SegNet to combine extracted boundary
features from the full image with material features
learnt from the image patches.
• A self-training approach to augment sparsely la-
belled datasets to provide boundary features for
the CAM-SegNet.
The proposed CAM-SegNet achieves an improve-
ment of 3-20% on accuracy and 6-28% on Mean IoU
against the state-of-the-art network architectures and
single-branch approaches in the control group.
2 BACKGROUND
Dense Material Segmentation. There have been a
few attempts (Farhadi et al., 2009; Zheng et al., 2014)
to annotate the materials in existing datasets (Evering-
ham et al., 2015; Silberman et al., 2012), but the num-
ber of categories covered is not enough to segment
common scenes. Bell et al. (Bell et al., 2015) created
the first dedicated material dataset which contains 3
million samples from 23 material categories. Since its
training set contains only labelled isolated pixels, this
dataset is hard to be used for robust dense segmen-
tation networks (Xie et al., 2017; Chen et al., 2017;
Long et al., 2015; Xie et al., 2020), which requires
the training set to provide labelled segments. Re-
cently, Schwartz and Nishino (Schwartz and Nishino,
2020) released the LMD, which contains 16 material
categories and 5,845 images with segments that each
covers a single material category. This dataset can be
used to train segmentation networks in an end-to-end
manner, but still has several problems. First, the num-
ber of samples is insufficient since the LMD is very
diverse in terms of material categories and scenes.
Second, the ground truth segments do not cover all
pixels belonging to the same category, as shown in
Figure 3, 4.
Global and Local Training. Global and local train-
ing is an approach to combine features extracted
from original images by the global branch and im-
age patches by the local branch. Chen et al. (Chen
et al., 2019) adopted this approach to preserve lo-
cal details when processing down-sampled images.
Due to the memory bottleneck when processing high-
resolution patches, they split these patches into mul-
tiple batches and gather the full feature maps with
several forward steps. This method makes the fea-
ture combining process complicated and costs more
training time. To reduce the training time, Zhang
et al. (Zhang et al., 2020) reduced the number of
trainable parameters by sharing the weights between
local and global branches. Wu et al. (Wu et al.,
2020) alleviated the training burden by proposing
only critical patches to refine the global segmenta-
tion. Likewise, Iodice and Mikolajczyk (Iodice and
Mikolajczyk, 2020) proposed to crop the extracted
global feature maps into equal blocks as the local
features. For the dense material segmentation task,
our CAM-SegNet compensates for the lost features
when training with a single branch alone. Accord-
ing to Schwartz (Schwartz, 2018), the network trained
with original images tends to ignore material prop-
erties, while the network trained with patches drops
contextual cues. Moreover, the LMD contains no
high-resolution images so that our CAM-SegNet can
jointly train the global and local branches in an end-
to-end manner without a severe training burden.
Boundary Refinement. For dense material segmen-
tation task, the neural network based methods may
not predict the pixels near the boundary accurately,
due to the lack of labelled pixels near the boundary
to train the network (Schwartz, 2018, p. 75). There-
fore, the dense Conditional Random Field (dense-
CRF) (Kr
¨
ahenb
¨
uhl and Koltun, 2013) is often used
to refine the boundary quality (Bell et al., 2015;
Schwartz and Nishino, 2016), which assumes that
similar pixels should be classified as the same cat-
egory. However, the downside is that the output of
the dense-CRF is sensitive to the parameters tuned by
grid search. To optimise the CRF parameters together
with the network, Zhao et al. (Zhao et al., 2017a;
Zhao et al., 2020) chose to refine the material seg-
mentation with the CRFasRNN proposed by Zheng et
al. (Zheng et al., 2015). In this paper, we compare two
GPU trainable CRF variants, Conv-CRF (Teichmann
and Cipolla, 2019) and PAC-CRF (Su et al., 2019), to
speed up the training process.
CAM-SegNet: A Context-Aware Dense Material Segmentation Network for Sparsely Labelled Datasets
191

Another method to refine the boundary quality
is to use a loss function that measures the quality
of the segmentation boundary. A possible choice
is the boundary metric in (Csurka et al., 2013),
which measures the overlap between the ground truth
boundaries and the predicted segmentation bound-
aries. Bokhovkin and Burnaev (Bokhovkin and Bur-
naev, 2019) utilised the max pooling operation to de-
tect the boundaries and make the boundary metric a
differentiable loss function. Although experiments
in (Kang et al., 2021; Bokhovkin and Burnaev, 2019)
have shown that this loss function can help the net-
work to optimise the predictions near the boundaries,
the loss value may not decrease when used in isola-
tion since it does not contribute to the segmentation
accuracy directly. Therefore, the local branch fea-
tures, which are designed to achieve high accuracy,
are passed to the global branch to make sure that our
CAM-SegNet can extract boundary features steadily.
Self-training. Semi-supervised learning is one pos-
sible way to improve the segmentation results with
sparsely labelled datasets. It utilises both labelled and
unlabeled pixels during training. Among all semi-
supervised learning approaches (Zhu, 2005), self-
training is the most simple yet efficient one to fill in
unlabelled pixels with generated pseudo labels. Re-
cent experiments show that this approach can achieve
state-of-the-art segmentation performance with lim-
ited labelled samples (Le et al., 2015; Cheng et al.,
2020; Zoph et al., 2020). Although the self-training
method may introduce more misclassified labels as
noise to the dataset compared with more robust meth-
ods based on a discriminator to control pseudo label
quality (Souly et al., 2017), the noise can also pre-
vent the network from overfitting (Goodfellow et al.,
2016, p. 241) since the LMD is a small dataset. There-
fore, we choose this self-training method to generate
pseudo labels and provide the boundary information
for our CAM-SegNet. In our experiments, we show
that for the material segmentation task, self-training
approach is not the factor that improves the perfor-
mance. Instead, the combined boundary and material
features are the reason why our CAM-SegNet can per-
form well.
3 METHODOLOGY
In this section, we present our CAM-SegNet for the
dense material segmentation task. Figure 1 illustrates
the overall network structure. The global branch takes
the original image as input while the cropped patches
are fed into the local branch. The encoders extract
features from both branches independently and down-
sample the feature maps. The decoders recover the
feature map size jointly (with the feature sharing con-
nection) and generate the outputs for each branch.
The composite branch crops and concatenates the
global branch output O
G
to the local branch output
O
L
. Then the network merges the upsampled fea-
ture maps, and generates the composite output O
C
.
The last convolutional layer is applied to patch fea-
ture maps O
C
0
, to ensure that the overall network still
focuses on material information. Finally, the optional
CRF layer can be used to refine the composite out-
put O
C
. While training, the contextual features ex-
tracted from the global branch is controlled by the
loss function applied to the global branch output O
G
.
During evaluation time, only the composite output O
C
is kept to generate the final segmentation. The algo-
rithm used to crop the input images is described in
Appendix section.
3.1 Feature Sharing Connection
The decoders in Figure 1 gradually upsample the fea-
ture maps with three convolutional blocks. To train
the two branches collaboratively, at the input of each
block, the feature maps are shared between the global
and local branches through the feature sharing con-
nection showed in detail in Figure 2. We define the
feature maps as X
G
∈ R
c×h
G
×w
G
for the global branch,
and X
L
∈ R
b×c×h
L
×w
L
for the local branch. Here c
represents the channel number, h,w are the height
and width, and b is the number of patches. First,
the global branch feature maps X
G
are cropped into
patches, X
0
G
∈ R
b×c×h
L
×w
L
, and these patches are con-
catenated with the local branch feature maps. Then
the network merges the patch feature maps X
L
from
the local branch to produce X
0
L
∈ R
c×h
G
×w
G
. Finally,
the merged feature maps are concatenated with the
global branch feature maps. The number of channels
in the concatenated feature maps, X
CG
and X
CL
, are
doubled to 2c. To ensure that the global and local fea-
ture maps can match each other spatially, the same
patch cropping method is used as the one used to crop
the input images.
3.2 Context-Aware Dense Material
Segmentation
The three outputs (O
G
,O
L
,O
C
) generated from our
CAM-SegNet make it convenient to control the fea-
tures extracted from each branch, by optimising the
branches to achieve different tasks with different loss
functions. To optimise the CAM-SegNet, the total
loss function L
total
can be represented as
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
192

Figure 1: CAM-SegNet architecture. The feature maps in the decoders are shared between the global and local branches.
After the encoder-decoder component, the feature maps at the same spatial location are concatenated together and passed into
the composite branch, which upsamples the feature maps to the same size as the original input image. The composite output
can be refined by an optional CRF layer.
Figure 2: The feature sharing connection between the de-
coders. X
CG
is the concatenated global branch feature maps,
while X
CL
is the concatenated local branch feature maps.
L
total
= L
global
(O
G
,Y
1/4
) + L
local
(O
L
,Y
1/4
) + L
composite
(O
C
,Y )
(1)
where Y is the ground truth segment, and Y
1/4
is the
downsampled ground truth segment. The downsam-
pled ground truth is used to reduce the memory ca-
pacity needed during training. This paper aims to
combine contextual and material features to generate
dense material segmentation. According to Schwartz
and Nishino (Schwartz and Nishino, 2016; Schwartz
and Nishino, 2020; Schwartz, 2018), material patches
without contextual cues can force the network to ex-
tract material features. Since the local branch is re-
sponsible to learn from image patches, it is optimised
to provide material features with the focal loss (Lin
et al., 2017b), i.e., L
f ocal
=
1
N
∑
i
−(1 − p
i
)
3
log(p
i
).
Here N is the number of pixels in O
L
, and p
i
is
the estimated probability of pixel i for the true cat-
egory. Similarly, the global branch is optimised to
provide contextual features since the original images
contain contextual information. However, context la-
bels (e.g.objects or places) are needed to extract cor-
responding contextual features. Although these fea-
tures can reduce the material segmentation uncer-
tainty (Schwartz and Nishino, 2016), the cost of extra
labels is not desired.
Instead of exploring contextual features that need
extra labels, our CAM-SegNet investigates the con-
textual information that is missing in the image
patches — the boundary between different mate-
rials. For pixels along the boundaries of mate-
rial c, let R
c
,P
c
be the recall and precision score.
To provide boundary related features, the boundary
loss (Bokhovkin and Burnaev, 2019), L
boundary
=
∑
c
1 −
2R
c
P
c
R
c
+P
c
, is applied to the global branch output
O
G
, which aligns the predicted material boundaries
with the ground-truth segments. Ideally, the com-
posite branch should be able to generate predictions
accurately with good boundary quality, if the com-
posite branch can learn from the outputs from both
branches properly. Therefore, we set the composite
branch loss function L
composite
to L
boundary
(O
C
,Y ) +
L
f ocal
(O
C
,Y ), to ensure that it is optimised to achieve
these two goals at the same time.
CAM-SegNet: A Context-Aware Dense Material Segmentation Network for Sparsely Labelled Datasets
193

3.3 Self-training Approach
Since not all training segments in LMD cover the
whole material region, the detected ground truth
boundaries may provide misleading information to
the boundary loss (Bokhovkin and Burnaev, 2019).
Therefore, we choose to complete the labels first.
A network is trained with the focal loss (Lin et al.,
2017b) and sparsely labelled LMD as the initial
teacher model to generate pseudo labels. We assume
that the LMD augmented with pseudo labels can pro-
vide necessary boundary information for our CAM-
SegNet. The teacher-student-teacher self-training ap-
proach (Zoph et al., 2020) contains four stages:
1. The initial teacher model is trained by setting all
the loss terms in Equation 1 to L
f ocal
.
2. The teacher model generates the feature maps for
the training set, and replaces the known pixels
with ground truth labels.
3. The feature maps are refined by the CRF layer, to
produce the final pseudo labels with better mate-
rial boundary.
4. A CAM-SegNet is trained as a student model with
the augmented LMD.
To improve the pseudo label quality and achieve
the best performance, typical self-training cases such
as (Zoph et al., 2020; Le et al., 2015; Cheng et al.,
2020) repeat this training approach many times, to
produce a series of student models. In detail, the stu-
dent model at round t is considered as the new teacher
model, to produce a new augmented dataset with the
second and third stages. Then this dataset is used to
produce a new student model, S
t+1
with the fourth
stage. It is worth noting that, self-training may not
work well if the initial teacher model cannot predict
most of the labels correctly. According to Bank et
al. (Bank et al., 2018), an initial accuracy of 70%
is not enough. Since the reported material segmen-
tation accuracy is about 70% in (Bell et al., 2015;
Schwartz and Nishino, 2016; Schwartz and Nishino,
2020), we don’t expect to achieve a much higher ac-
curacy with the self-training approach. Instead, our
objective is to show that the additional boundary in-
formation can help the network to generate segments
with good boundary quality, and the self-training ap-
proach is one way to provide such information. The
results in Table 3 illustrate how our network performs
with and without the boundary information under the
same self-training approach.
4 EXPERIMENTS
Dataset. We evaluate our proposed method on the lo-
cal material database (LMD) (Schwartz and Nishino,
2016; Schwartz and Nishino, 2020), and follow their
suggestion to crop the images into 48 × 48 patches.
We randomly split all the samples into training (70%),
validation (15%) and test (15%) sets. Since our con-
tribution mainly focuses on indoor material segmen-
tation, we qualitatively evaluate the segmentation re-
sults only with images taken in indoor scenes such as
kitchens and living rooms.
Evaluation Metrics. We report the per-pixel aver-
age accuracy (Pixel Acc) and the mean intersection
over union value (Mean IoU). It is worth pointing out
that the sparsely labelled segments in LMD cannot re-
flect segmentation quality, especially for pixels near
the material boundaries. Therefore, in addition to the
LMD test set, we exhaustively labelled eight indoor
images in the LMD test set to evaluate the perfor-
mance of our model. We refer to these eight images
as DLMD in our experiments.
Baseline Models. Our main contribution is to com-
bine both global contextual features and local mate-
rial features to achieve dense material segmentation.
To show the advantage of our model among state-
of-the-art networks for image segmentation task, we
use DeepLabV3+ (Chen et al., 2018), BiSeNetV2 (Yu
et al., 2020), and PSPNet (Zhao et al., 2017b) as our
baselines. In our experiments, we fine-tune the pre-
trained models implemented by (Yakubovskiy, 2020).
Since these networks have not been evaluated on the
LMD previously, we adopt the training procedures
from their original papers and use the same backbone
described below as our CAM-SegNet. The results are
refined by the same CRF layer for a fair comparison.
Implementation Details. The ResNet50 (He et al.,
2016) pre-trained on ImageNet (Deng et al., 2009) is
used as the encoder and the Feature Pyramid Network
(FPN) (Lin et al., 2017a) is used as the decoder. The
skip connections are added between the encoder and
decoder as in (Chen et al., 2019). The patch size 48
is not divisible by the default encoder downsampling
factor 32, which may cause a spatial mismatch be-
tween the local and global feature maps. Therefore,
the downsampling factor is changed to 16, by setting
the stride of the final block convolutional layer to 1.
Since Schwartz and Nishino (Schwartz and Nishino,
2016; Schwartz and Nishino, 2020) did not release
the segmentation task training configuration, we fol-
low the work in (Bell et al., 2015) to normalise the im-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
194

ages by subtracting the mean (124, 117, 104) for the
RGB channels respectively. To refine the segmenta-
tion outputs, the trainable Conv-CRF (Teichmann and
Cipolla, 2019) is adopted. First, the Adam optimiser
with learning rate 0.00002 is used to train the network
without a CRF layer. Then the network parameters
are frozen to train the CRF layer with learning rate
0.001. Finally the network is refined together with the
CRF layer with learning rate 0.0000001. Each stage
is trained for 40 epochs. Since the images have dif-
ferent sizes, the gradients are accumulated to achieve
an equivalent batch size of 32. According to Chen et
al. (Chen et al., 2019), a mean squared error regular-
isation term between the global and local outputs can
help the network to learn from both branches. This
regularisation term is removed when the CRF layer is
appended to the network, to encourage the branches
to learn more diverse features. The self-training ap-
proach is repeated three times.
Quantitative Evaluation. In Table 1, we compare the
performance of our CAM-SegNet against the base-
line models. In order to illustrate the model perfor-
mance for individual material, seven common ma-
terials that exist in indoor scenes from DLMD are
chosen to report the Pixel Acc values. Our CAM-
SegNet achieves 3.25% improvement in terms of
Pixel Acc and 27.90% improvement on Mean IoU,
compared with the second highest score achieved by
DeepLabV3+. DeepLabV3+, BiSeNetV2 and PSP-
Net got low scores on materials of small objects, such
as foliage (plants for decoration) and paper. An-
other observation from Table 1 is that these three
networks can still achieve comparable performance
when recognising materials that usually cover a large
area of the image, such as plaster (material of the wall
and ceiling) and wood (usually wooden furniture).
One reason for the low scores may be that the
networks failed to learn from local material features
such as texture. PSPNet relies on the pooling layers
to learn from multi-scale features, DeepLabV3+ uses
dilated convolutional layers. Although BiSeNetV2
adopts two branches to learn from local and global
features, they all take the full-size images as input,
and the intermediate layers do not communicate dur-
ing training. The local features can fade out especially
when the image resolution is low. As a consequence,
these networks tend to depend on global features and
may not recognise small material regions well.
In contrast, our CAM-SegNet adopts both full-
size images and cropped patches, to learn from the
global and local features, which are combined and co-
trained. This enables our CAM-SegNet to recognise
materials that are hard to identify (foliage and paper)
for the baseline models.
Qualitative Evaluation. In Figure 3, we compared
the segmentation quality of our CAM-SegNet with
DeepLabV3+. As indicated by the Mean IoU score,
CAM-SegNet is better at recognising pixels around
material boundaries. In the kitchen image, we can
see the clear boundary between the ceramic floor and
the wooden cupboard. In the toilet image, the ce-
ramic close-stool is successfully separated from the
wall covered with plaster.
Ablation Study. In Table 2 and Table 3, we evaluate
the effectiveness of each component of our method.
The components include the network architecture, the
loss function, and the CRF layer. For fairness, all
models are trained with the same training procedure
as our CAM-SegNet. In detail, to show the advan-
tages of our two-branch architecture, we train two sin-
gle branch models with full-size images and image
patches separately, and refer to them as the Global
and Local models respectively.
Since the LMD is sparsely labelled, it is not
straightforward to train our CAM-SegNet without
the self-training approach. In order to control for
the influence of the self-training approach, we re-
train our CAM-SegNet with the focal loss (Lin et al.,
2017b) applied to all three outputs in Equation 1, and
name this model as the Self-Adaptive CAM-SegNet
(SACAM-SegNet). To avoid confusion, we refer to
our CAM-SegNet trained with the boundary loss as
the Boundary CAM-SegNet or BCAM-SegNet. We
see from Table 2 that our SACAM-SegNet achieves
an improvement of 12-20% on Pixel Acc and 6-19%
on Mean IoU, compared with single branch models
without the self-training approach. Although PAC-
CRF refined models tend to get higher Pixel Acc,
Conv-CRF refined models can achieve higher Mean
IoU.
Figure 4 shows that our SACAM-SegNet can pro-
duce correct labels for pixels that are hard to recog-
nise for the Global or Local models. For example, our
SACAM-SegNet can label the window in the kitchen
as glass correctly. Moreover, our model can ignore
object boundaries and cover all adjacent pixels be-
longing to the same material category. A good ex-
ample is the ceiling and the wall in the living room
picture. Surprisingly, our SACAM-SegNet can even
tell the difference between the scene outside the win-
dow and the scene drawing in the painting in the liv-
ing room, and successfully classify them as glass and
paper respectively. However, we also notice that the
PAC-CRF refined SACAM-SegNet tends to predict
wrong labels if the material region has rich textural
CAM-SegNet: A Context-Aware Dense Material Segmentation Network for Sparsely Labelled Datasets
195

Table 1: Quantitative evaluation results for our CAM-SegNet and baseline models. The values are reported as percentage.
The highest value for each evaluation metrics is in bold font. Seven common indoor materials are selected to report the
performance Pixel Acc. The Pixel Acc is evaluated on both LMD (the first column) and DLMD (the second column). Since
LMD test set provides sparsely labelled images, it is not meaningful to report Mean IoU on LMD. Therefore, Mean IoU is
reported on DLMD only.
Models ceramic fabric foliage glass paper plaster wood Pixel Acc Mean IoU
DeepLabV3+ 97.68 27.56 0.00 48.91 0.00 88.94 73.69 71.37 67.09 32.04
BiSeNetV2 18.86 3.07 0.00 23.00 0.34 58.68 70.77 45.66 37.66 15.08
PSPNet 55.59 0.12 0.00 66.73 1.47 79.25 73.76 50.12 52.11 23.39
CAM-SegNet (ours) 92.65 32.72 88.81 21.99 30.67 87.77 93.82 71.65 69.27 40.98
Figure 3: Qualitative comparison. The sparsely labelled images are taken from LMD test set, and densely labelled with all
known material categories manually.
Table 2: Quantitative results for our SACAM-SegNet and
single branch models. Our network outperforms single
branch models.
Metric CRF Layer Local Global SACAM-SegNet
Pixel Acc
PAC-CRF 61.95 60.58 69.25
Conv-CRF 58.07 55.67 66.83
Mean IoU
PAC-CRF 27.07 30.52 32.25
Conv-CRF 31.77 32.25 34.16
clues. For example, the striped curtain covers the win-
dow in the kitchen. The PAC-CRF forces the network
to label pixels between the stripes to different cate-
gories. This behaviour is not desired since it can give
wrong boundary information. That is the reason why
we choose to use a Conv-CRF refined model to gen-
erate the pseudo labels. More results can be found in
the Appendix section.
Table 3 compares the performance between
SACAM-SegNet and BCAM-SegNet with the self-
training approach. Without boundary loss, the
SACAM-SegNet performs worse compared with the
BCAM-SegNet. This shows that self-training alone
does not result in the good performance of our
BCAM-SegNet. The boundary information can sta-
bilise our CAM-SegNet to learn from noisy pseudo la-
bels and gradually correct the pseudo labels to achieve
higher accuracy. The qualitative comparison is shown
in the Appendix section.
Table 3: Quantitative performance of our CAM-SegNet
trained on augmented LMD with the self-training approach.
Models
SACAM-SegNet BCAM-SegNet
Pixel Acc Mean IoU Pixel Acc Mean IoU
Student 1 66.42% 37.93 67.38% 39.26
Student 2 67.26% 38.97 68.18% 39.81
Student 3 64.85% 32.19 69.27% 40.98
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
196
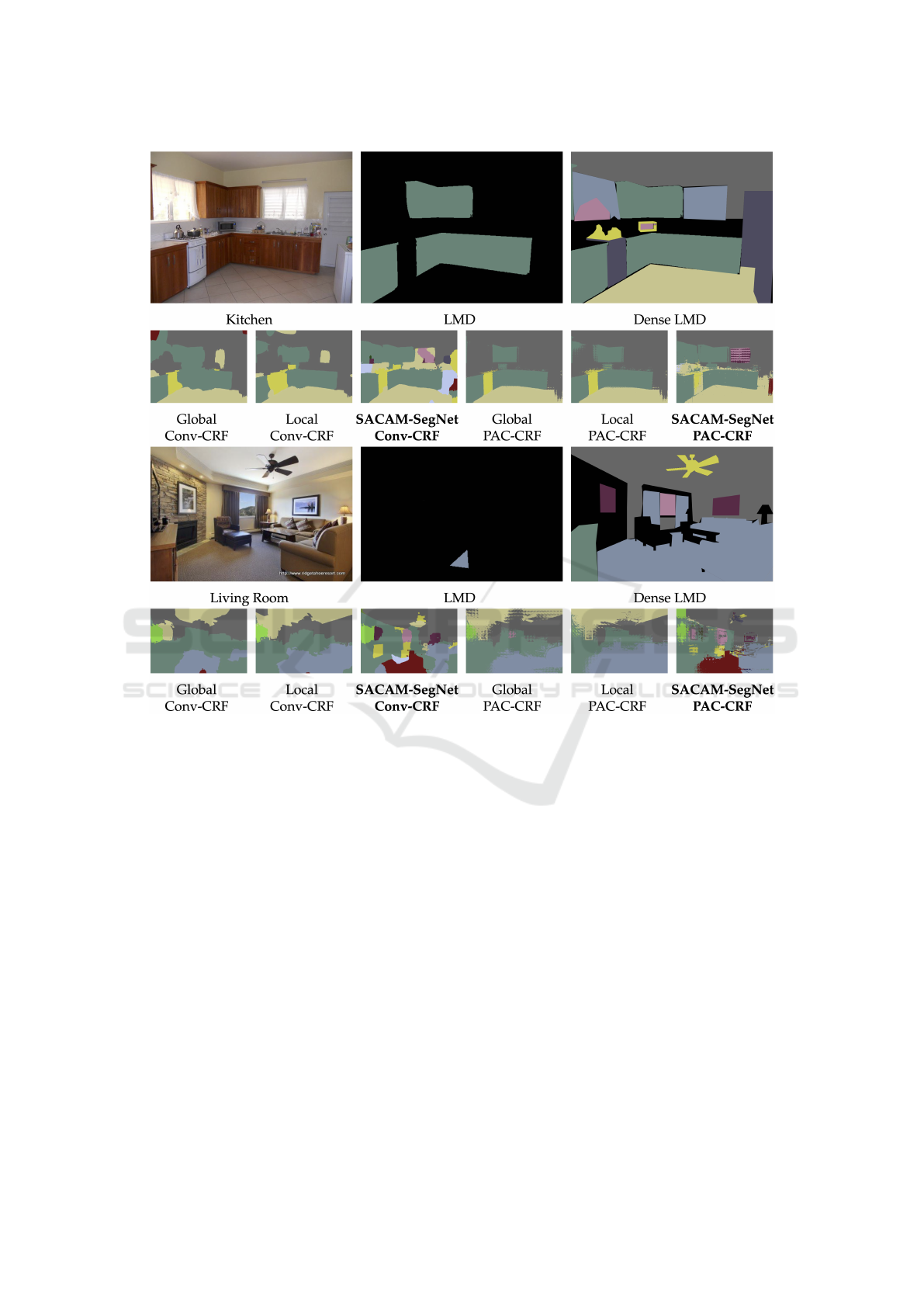
Figure 4: Dense material segmentation results for Kitchen and Living Room images.
5 CONCLUSIONS
This paper proposed a hybrid network architecture
and training procedure to combine contextual features
and material features. The effectiveness of the CAM-
SegNet is validated with boundary contextual fea-
tures. We show that the combined features can help
the network to recognise materials at different scales
and assign the pixels around the boundaries to the cor-
rect categories. In addition to boundary features, it is
possible to enhance the network performance one step
further with generated object and scene pseudo la-
bels. We will investigate the possibility of combining
multiple kinds of pseudo labels with semi-supervised
training approach in future studies.
ACKNOWLEDGMENT
This work was supported by the EPSRC Programme
Grant Immersive Audio-Visual 3D Scene Reproduc-
tion Using a Single 360 Camera (EP/V03538X/1).
REFERENCES
Bank, D., Greenfeld, D., and Hyams, G. (2018). Improved
training for self training by confidence assessments. In
Science and Information Conference, pages 163–173.
Springer.
Bell, S., Upchurch, P., Snavely, N., and Bala, K. (2015).
Material recognition in the wild with the materials in
context database. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3479–3487.
Bokhovkin, A. and Burnaev, E. (2019). Boundary loss for
remote sensing imagery semantic segmentation. In
CAM-SegNet: A Context-Aware Dense Material Segmentation Network for Sparsely Labelled Datasets
197

International Symposium on Neural Networks, pages
388–401. Springer.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2017). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE transactions on
pattern analysis and machine intelligence, 40(4):834–
848.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sepa-
rable convolution for semantic image segmentation. In
Proceedings of the European conference on computer
vision (ECCV), pages 801–818.
Chen, W., Jiang, Z., Wang, Z., Cui, K., and Qian,
X. (2019). Collaborative global-local networks for
memory-efficient segmentation of ultra-high resolu-
tion images. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 8924–8933.
Cheng, H., Gu, C., and Wu, K. (2020). Weakly-supervised
semantic segmentation via self-training. In Journal
of Physics: Conference Series, volume 1487, page
012001. IOP Publishing.
Csurka, G., Larlus, D., Perronnin, F., and Meylan, F. (2013).
What is a good evaluation measure for semantic seg-
mentation?. In BMVC, volume 27, pages 10–5244.
Delany, M. and Bazley, E. (1970). Acoustical properties
of fibrous absorbent materials. Applied Acoustics,
3(2):105–116.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Everingham, M., Eslami, S. A., Van Gool, L., Williams,
C. K., Winn, J., and Zisserman, A. (2015). The pascal
visual object classes challenge: A retrospective. Inter-
national journal of computer vision, 111(1):98–136.
Farhadi, A., Endres, I., Hoiem, D., and Forsyth, D. (2009).
Describing objects by their attributes. In 2009 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1778–1785. IEEE.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
learning. MIT press.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hu, D., Bo, L., and Ren, X. (2011). Toward robust material
recognition for everyday objects. In BMVC, volume 2,
page 6. Citeseer.
Iodice, S. and Mikolajczyk, K. (2020). Text attribute ag-
gregation and visual feature decomposition for person
search. In BMVC.
Kang, J., Fernandez-Beltran, R., Sun, X., Ni, J., and Plaza,
A. (2021). Deep learning-based building footprint ex-
traction with missing annotations. IEEE Geoscience
and Remote Sensing Letters.
Kim, H., Remaggi, L., Jackson, P. J., and Hilton, A. (2019).
Immersive spatial audio reproduction for vr/ar using
room acoustic modelling from 360 images. In 2019
IEEE Conference on Virtual Reality and 3D User In-
terfaces (VR), pages 120–126. IEEE.
Kr
¨
ahenb
¨
uhl, P. and Koltun, V. (2013). Parameter learn-
ing and convergent inference for dense random fields.
In International Conference on Machine Learning,
pages 513–521. PMLR.
Le, T. H. N., Luu, K., and Savvides, M. (2015). Fast and ro-
bust self-training beard/moustache detection and seg-
mentation. In 2015 international conference on bio-
metrics (ICB), pages 507–512. IEEE.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017a). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017b). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
McDonagh, A., Lemley, J., Cassidy, R., and Corcoran, P.
(2018). Synthesizing game audio using deep neural
networks. In 2018 IEEE Games, Entertainment, Me-
dia Conference (GEM), pages 1–9. IEEE.
Schwartz, G. (2018). Visual Material Recognition. Drexel
University.
Schwartz, G. and Nishino, K. (2016). Material recognition
from local appearance in global context. In Biol. and
Artificial Vision (Workshop held in conjunction with
ECCV 2016).
Schwartz, G. and Nishino, K. (2020). Recognizing material
properties from images. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 42(8):1981–1995.
Sharan, L., Liu, C., Rosenholtz, R., and Adelson, E. H.
(2013). Recognizing materials using perceptually in-
spired features. International journal of computer vi-
sion, 103(3):348–371.
Shrivatsav, N., Nair, L., and Chernova, S. (2019). Tool sub-
stitution with shape and material reasoning using dual
neural networks. arXiv preprint arXiv:1911.04521.
Silberman, N., Hoiem, D., Kohli, P., and Fergus, R. (2012).
Indoor segmentation and support inference from rgbd
images. In European conference on computer vision,
pages 746–760. Springer.
Souly, N., Spampinato, C., and Shah, M. (2017). Semi su-
pervised semantic segmentation using generative ad-
versarial network. In Proceedings of the IEEE inter-
national conference on computer vision, pages 5688–
5696.
Su, H., Jampani, V., Sun, D., Gallo, O., Learned-Miller,
E., and Kautz, J. (2019). Pixel-adaptive convolutional
neural networks. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition, pages 11166–11175.
Tang, Z., Bryan, N. J., Li, D., Langlois, T. R., and Manocha,
D. (2020). Scene-aware audio rendering via deep
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
198

acoustic analysis. IEEE transactions on visualization
and computer graphics, 26(5):1991–2001.
Teichmann, M. and Cipolla, R. (2019). Convolutional crfs
for semantic segmentation. In BMVC.
Wu, T., Lei, Z., Lin, B., Li, C., Qu, Y., and Xie, Y. (2020).
Patch proposal network for fast semantic segmenta-
tion of high-resolution images. In Proceedings of
the AAAI Conference on Artificial Intelligence, vol-
ume 34, pages 12402–12409.
Xie, Q., Luong, M.-T., Hovy, E., and Le, Q. V. (2020). Self-
training with noisy student improves imagenet classi-
fication. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
10687–10698.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1492–
1500.
Yakubovskiy, P. (2020). Segmentation models pytorch.
https://github.com/qubvel/segmentation models.
pytorch.
Yu, C., Gao, C., Wang, J., Yu, G., Shen, C., and Sang, N.
(2020). Bisenet v2: Bilateral network with guided ag-
gregation for real-time semantic segmentation. arXiv
preprint arXiv:2004.02147.
Zhang, H., Liao, Y., Yang, H., Yang, G., and Zhang, L.
(2020). A local-global dual-stream network for build-
ing extraction from very-high-resolution remote sens-
ing images. IEEE Transactions on Neural Networks
and Learning Systems.
Zhao, C., Sun, L., and Stolkin, R. (2017a). A fully end-to-
end deep learning approach for real-time simultaneous
3d reconstruction and material recognition. In 2017
18th International Conference on Advanced Robotics
(ICAR), pages 75–82. IEEE.
Zhao, C., Sun, L., and Stolkin, R. (2020). Simultaneous ma-
terial segmentation and 3d reconstruction in industrial
scenarios. Frontiers in Robotics and AI, 7.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017b).
Pyramid scene parsing network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2881–2890.
Zheng, S., Cheng, M.-M., Warrell, J., Sturgess, P., Vineet,
V., Rother, C., and Torr, P. H. (2014). Dense seman-
tic image segmentation with objects and attributes. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3214–3221.
Zheng, S., Jayasumana, S., Romera-Paredes, B., Vineet, V.,
Su, Z., Du, D., Huang, C., and Torr, P. H. (2015). Con-
ditional random fields as recurrent neural networks. In
Proceedings of the IEEE international conference on
computer vision, pages 1529–1537.
Zhu, X. J. (2005). Semi-supervised learning literature sur-
vey.
Zoph, B., Ghiasi, G., Lin, T.-Y., Cui, Y., Liu, H., Cubuk,
E. D., and Le, Q. V. (2020). Rethinking pre-training
and self-training. arXiv preprint arXiv:2006.06882.
APPENDIX
Crop the Images or Feature Maps. Algorithm 1 is
designed to calculate the parameters when cropping
the input images or feature maps. The same parame-
ters are used to merge the patches to ensure the fea-
ture value at the corresponding position describes the
same image region in the global and the local branch.
Algorithm 1: Calculate Patch Cropping Parameters.
1: procedure GETPATCHINFO(PatchSize, S) . S is
the height or width of the original
image
2: Initialize
3: num patch ← 0 . Number of patches
cropped along one dimension
4: stride ← 0 . Number of pixels to next
patch
5: pad ← 0 . Number of zeros to pad at a
particular dimension
6: if S mod patch size equal 0 then . When
the patches accurately cover the
image
7: num patch ← S divide patch size
8: stride ← patch size
9: else. Allow padding and overlapping for one
more patch
10: num patch ← (S divide patch size)
plus 1
11: stride ← (S divide num patch) plus 1
12: pad ← (stride multiply
(num patch minus 1)) plus
patch size minus S
13: return num patch, stride, pad
SACAM-SegNet Segmentation Images. More seg-
mentation images generated by the SACAM-SegNet
refigned by the Conv-CRF (Teichmann and Cipolla,
2019) layer are shown in Figure 5. The second col-
umn images are the ground truth segments in the
LMD (Schwartz and Nishino, 2016; Schwartz and
Nishino, 2020), and the third column images are man-
ually labelled dense segments.
BCAM-SegNet Segmentation Images. More seg-
mentation images generated by the three BCAM-
SegNet student models trained with the self-training
approach are shown in Figure 6. Our BCAM-SegNet
managed to refine the material boundaries for some
images, such as the window in the first image, and the
ceramic close-stool in the sixth image.
CAM-SegNet: A Context-Aware Dense Material Segmentation Network for Sparsely Labelled Datasets
199

Figure 5: Dense material segmentation results for the SACAM-SegNet, refined by the Conv-CRF layer.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
200
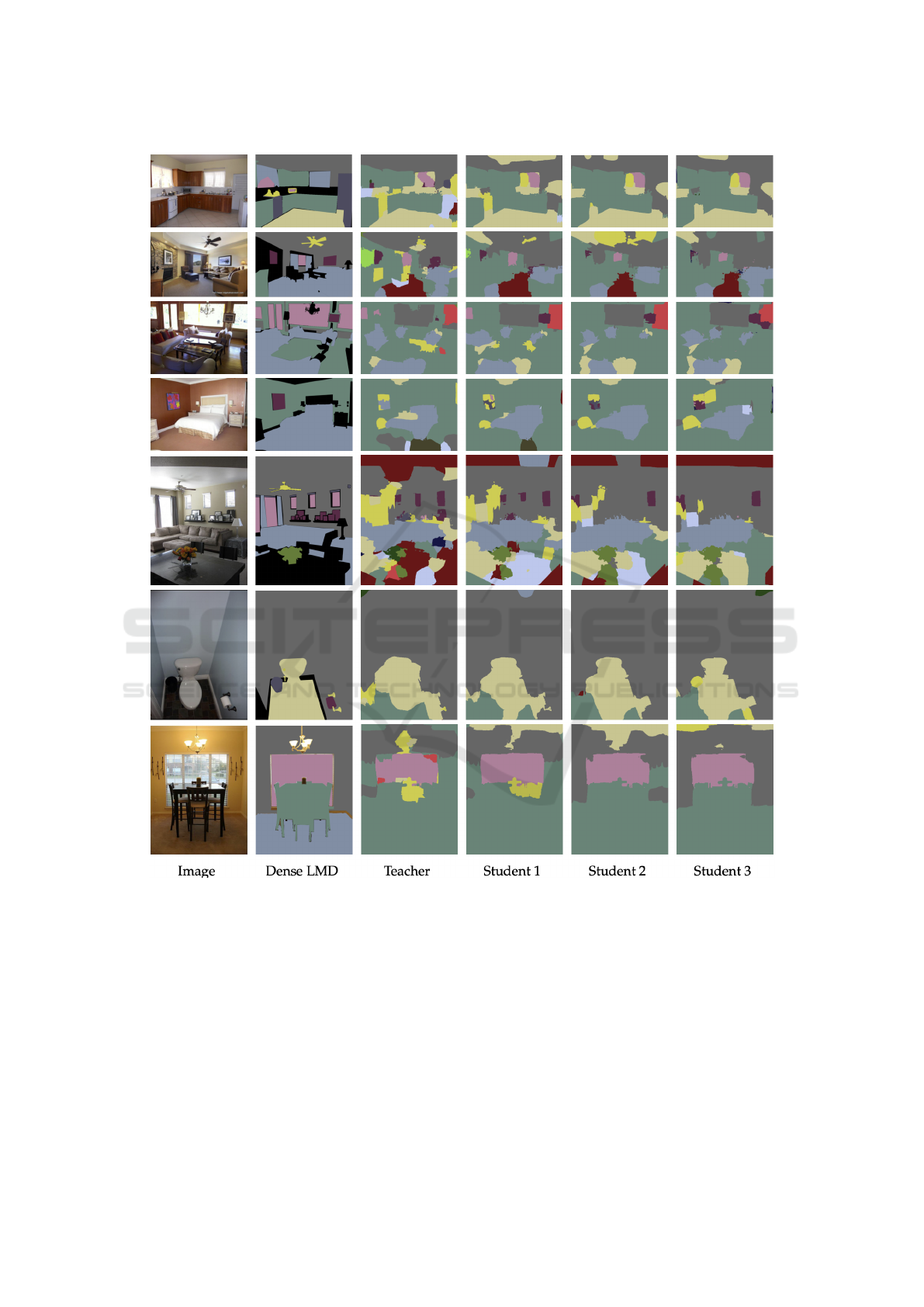
Figure 6: Dense material segmentation results generated by BCAM-SegNet, refined with the Conv-CRF layer. The self-
training approach is repeated three times to train Student 1, 2, and 3.
CAM-SegNet: A Context-Aware Dense Material Segmentation Network for Sparsely Labelled Datasets
201
