
Transformers in Self-Supervised Monocular Depth Estimation with
Unknown Camera Intrinsics
Arnav Varma
∗
, Hemang Chawla
∗
, Bahram Zonooz and Elahe Arani
Advanced Research Lab, NavInfo Europe, The Netherlands
Keywords:
Transformers, Convolutional Neural Networks, Monocular Depth Estimation, Camera Self-calibration,
Self-Supervised Learning.
Abstract:
The advent of autonomous driving and advanced driver assistance systems necessitates continuous develop-
ments in computer vision for 3D scene understanding. Self-supervised monocular depth estimation, a method
for pixel-wise distance estimation of objects from a single camera without the use of ground truth labels, is
an important task in 3D scene understanding. However, existing methods for this task are limited to con-
volutional neural network (CNN) architectures. In contrast with CNNs that use localized linear operations
and lose feature resolution across the layers, vision transformers process at constant resolution with a global
receptive field at every stage. While recent works have compared transformers against their CNN counter-
parts for tasks such as image classification, no study exists that investigates the impact of using transformers
for self-supervised monocular depth estimation. Here, we first demonstrate how to adapt vision transform-
ers for self-supervised monocular depth estimation. Thereafter, we compare the transformer and CNN-based
architectures for their performance on KITTI depth prediction benchmarks, as well as their robustness to
natural corruptions and adversarial attacks, including when the camera intrinsics are unknown. Our study
demonstrates how transformer-based architecture, though lower in run-time efficiency, achieves comparable
performance while being more robust and generalizable.
1 INTRODUCTION
There have been rapid improvements in scene un-
derstanding for robotics and advanced driver assis-
tance systems (ADAS) over the past years. This suc-
cess is attributed to the use of Convolutional Neural
Networks (CNNs) within a mostly encoder-decoder
paradigm. Convolutions provide spatial locality and
translation invariance which has proved useful for im-
age analysis tasks. The encoder, often a convolutional
Residual Network (ResNet) (He et al., 2016), learns
feature representations from the input and is followed
by a decoder which aggregates these features and con-
verts them into final predictions. However, the choice
of architecture has a major impact on the performance
and generalizability of the task.
While CNNs have been the preferred architec-
ture in computer vision, transformers have also re-
cently gained traction (Dosovitskiy et al., 2021) mo-
tivated by their success in natural language process-
ing (Vaswani et al., 2017). Notably, they have
∗
Equal contribution
also outperformed CNNs for object detection (Car-
ion et al., 2020) and semantic segmentation (Zheng
et al., 2021). This is also reflected in methods for
monocular dense depth estimation, a pertinent task
for autonomous planning and navigation, where su-
pervised transformer-based methods (Li et al., 2020;
Ranftl et al., 2021) have been proposed as an al-
ternative to supervised CNN-based methods (Lee
et al., 2019; Aich et al., 2021). However, super-
vised methods require extensive RGB-D ground truth
collected from costly LiDARs or multi-camera rigs.
Instead, self-supervised methods have increasingly
utilized concepts of Structure from Motion (SfM)
with known camera intrinsics to train monocular
depth and ego-motion estimation networks simultane-
ously (Guizilini et al., 2020; Lyu et al., 2020; Chawla
et al., 2021). While transformer ingredients such as
attention have been utilized for self-supervised depth
estimation (Johnston and Carneiro, 2020), most meth-
ods are nevertheless limited to the use of CNNs that
have localized linear operations and lose feature reso-
lution during downsampling to increase their limited
receptive field (Yang et al., 2021).
758
Varma, A., Chawla, H., Zonooz, B. and Arani, E.
Transformers in Self-Supervised Monocular Depth Estimation with Unknown Camera Intrinsics.
DOI: 10.5220/0010884000003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
758-769
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
EMBED
TRANSFORMER
TRANSFORMER
TRANSFORMER
REASSEMBLE
REASSEMBLE FUSION
HEAD
T
3
T
6
T
9
T
12
T
1
T
2
REASSEMBLE
REASSEMBLE
FUSION
HEAD
FUSION
HEAD
FUSION
HEAD
TRANSFORMER
TRANSFORMER
TRANSFORMER
REASSEMBLE
T
12
T
1
T
2
CONV
ReLU
CONV
ReLU
CONV
ReLU
CONV
GLOBAL AVERAGE
POOLING
CONV CONV
SOFTPLUS
F
x
, F
y
C
x
, C
y
EMBED
Target
Source
Ego-motion & Intrinsics Network
Depth Network
View
Synthesis
Source
Target
,
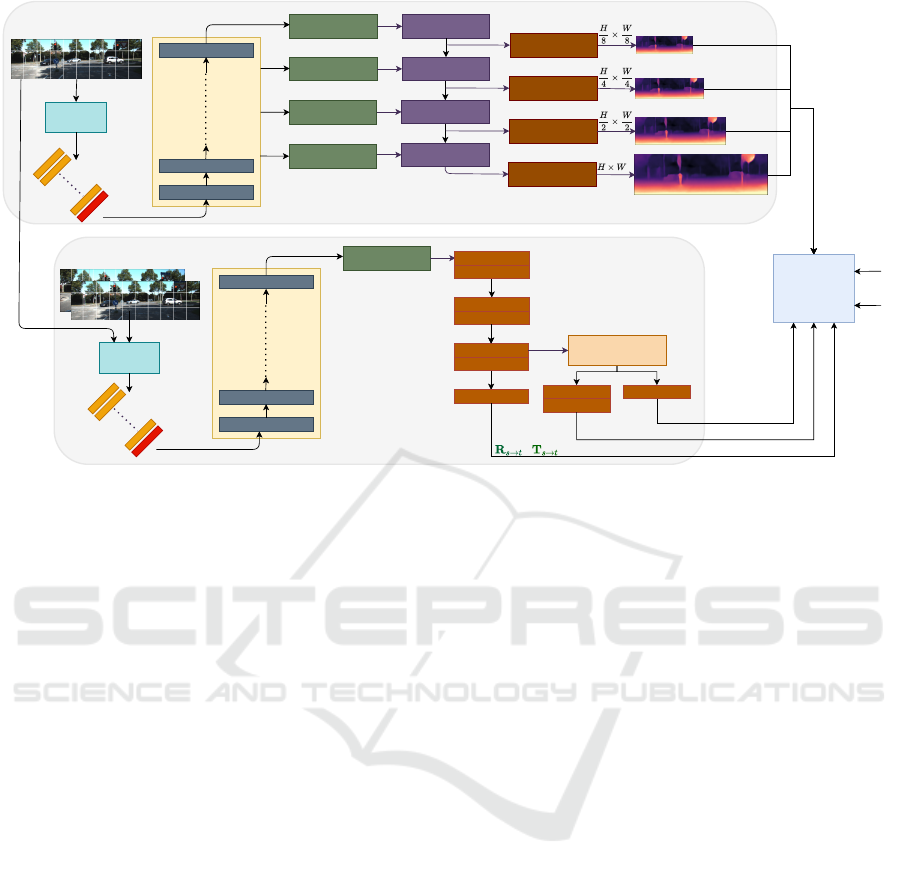
Figure 1: An overview of Monocular Transformer Structure from Motion Learner (MT-SfMLearner) with learned intrinsics.
We readapt modules from Dense Prediction Transformer (DPT) and Monodepth2 to be trained with appearance-based losses
for self-supervised monocular depth, ego-motion, and intrinsics estimation.
On the other hand, transformers with fewer in-
ductive biases allow for more globally coherent pre-
dictions with different layers attending to local and
global features simultaneously (Touvron et al., 2021).
However, transformers require more training data
and can be more computationally demanding (Caron
et al., 2021). While multiple studies have compared
transformers against CNNs for tasks such as image
classification (Raghu et al., 2021; Bhojanapalli et al.,
2021), no study exists that evaluates the impact of
transformers in self-supervised monocular depth es-
timation, including when the camera intrinsics may
be unknown.
In this work, we conduct a comparative study
between CNN- and transformer-based architectures
for self-supervised monocular depth estimation. Our
contributions are as follows:
• We demonstrate how to adapt vision transform-
ers for self-supervised monocular depth estima-
tion by implementing a method called Monocular-
Transformer SfMLearner (MT-SfMLearner).
• We compare MT-SfMLearner and CNNs for
their performance on the KITTI monocular depth
Eigen Zhou split (Eigen et al., 2014) and the on-
line depth prediction benchmark (Geiger et al.,
2013).
• We investigate the impact of architecture choices
for the individual depth and ego-motion networks
on performance as well as robustness to natural
corruptions and adversarial attacks.
• We also introduce a modular method that simulta-
neously predicts camera focal lengths and princi-
pal point from the images themselves and can eas-
ily be utilized within both CNN- and transformer-
based architectures.
• We study the accuracy of intrinsics estimation as
well as its impact on the performance and robust-
ness of depth estimation.
• Finally, we also compare the run-time computa-
tional and energy efficiency of the architectures
for depth and intrinsics estimation.
MT-SfMLearner provides real-time depth esti-
mates and illustrates how transformer-based architec-
ture, though lower in run-time efficiency, can achieve
comparable performance as the CNN-based architec-
tures while being more robust under natural corrup-
tions and adversarial attacks, even when the cam-
era intrinsics are unknown. Thus, our work presents
a way to analyze the trade-off between the perfor-
mance, robustness, and efficiency of transformer- and
CNN-based architectures for depth estimation.
2 RELATED WORKS
Recently, transformer architectures such as Vision
Transformer (ViT) (Ranftl et al., 2021) and Data-
efficient image Transformer (DeiT) (Touvron et al.,
Transformers in Self-Supervised Monocular Depth Estimation with Unknown Camera Intrinsics
759

2021) have outperformed CNN architectures in im-
age classification. Studies comparing ViT and CNN
architectures like ResNet have further demonstrated
that transformers are more robust to natural corrup-
tions and adversarial examples in classification (Bho-
janapalli et al., 2021; Paul and Chen, 2021). Mo-
tivated by their success, researchers have replaced
CNN encoders with transformers in scene under-
standing tasks such as object detection (Carion et al.,
2020; Liu et al., 2021), semantic segmentation (Zheng
et al., 2021; Strudel et al., 2021), and supervised
monocular depth estimation (Ranftl et al., 2020; Yang
et al., 2021).
For supervised monocular depth estimation,
Dense Prediction Transformer (DPT) (Ranftl et al.,
2020) uses ViT as the encoder with a convolutional
decoder and shows more coherent predictions than
CNNs due to the global receptive field of transform-
ers. TransDepth (Yang et al., 2021) additionally uses
a ResNet projection layer and attention gates in the
decoder to induce the spatial locality of CNNs for
supervised monocular depth and surface-normal es-
timation. Lately, some works have inculcated ele-
ments of transformers such as self-attention (Vaswani
et al., 2017) in self-supervised monocular depth esti-
mation (Johnston and Carneiro, 2020; Xiang et al.,
2021). However, there has been no investigation
of transformers to replace the traditional CNN-based
methods (Godard et al., 2019; Lyu et al., 2020) for
self-supervised monocular depth estimation.
Moreover, self-supervised monocular depth esti-
mation still requires prior knowledge of the cam-
era intrinsics (focal length and principal point) dur-
ing training, which may be different for each data
source, may change over time, or be unknown a pri-
ori (Chawla et al., 2020). While multiple approaches
to supervised camera intrinsics estimation have been
proposed (Lopez et al., 2019; Zhuang et al., 2019),
not many self-supervised approaches exist (Gordon
et al., 2019).
Therefore, we investigate the impacts of trans-
former architectures on self-supervised monocular
depth estimation for their performance, robustness,
and run-time efficiency, even when intrinsics are un-
known.
3 METHOD
Our objective is to study the effect of utilizing vision
transformers for self-supervised monocular depth es-
timation in contrast with the contemporary methods
that utilize Convolutional Neural Networks.
Given a set of n images from a video sequence,
we simultaneously train depth and ego-motion pre-
diction networks. The inputs to the networks are a se-
quence of temporally consecutive RGB image triplets
{I
−
1
,I
0
,I
1
} ∈ R
H×W×3
. The depth network learns the
model f
D
: R
H×W×3
→ R
H×W
to output dense depth
(or disparity) for each pixel coordinate p of a sin-
gle image. Simultaneously, the ego-motion network
learns the model f
E
: R
2×H×W×3
→ R
6
to output rela-
tive translation (t
x
,t
y
,t
z
) and rotation (r
x
,r
y
,r
z
) form-
ing the affine transformation
ˆ
R
ˆ
T
0 1
∈ SE(3) between
a pair of overlapping images. The predicted depth
ˆ
D
and ego-motion
ˆ
T are linked together via the perspec-
tive projection model,
p
s
∼ K
ˆ
R
s←t
ˆ
D
t
(p
t
)K
−1
p
t
+ K
ˆ
T
s←t
, (1)
that warps the source images I
s
∈ {I
−
1
,I
1
} to the tar-
get image I
t
∈ {I
0
}, with the camera intrinsics de-
scribed by K. This process is called view synthesis,
as shown in Figure 1. We train the networks us-
ing the appearance-based photometric loss between
the real and synthesized target images, as well as
a smoothness loss on the depth predictions (Godard
et al., 2019).
3.1 Architecture
Here we describe Monocular Transformer Struc-
ture from Motion Learner (MT-SfMLearner), our
transformer-based method for self-supervised monoc-
ular depth estimation (Figure 1).
3.1.1 Depth Network
For the depth network, we readapt the Dense Pre-
diction Transformer (DPT) (Ranftl et al., 2020) for
self-supervised learning, with a DeiT-Base (Touvron
et al., 2021) in the encoder. There are five components
of the depth network:
• An Embed module, which is a part of the en-
coder, takes an image I ∈ R
H×W×3
, and converts
non-overlapping image patches of size p × p into
N
p
= H · W /p
2
tokens t
i
∈ R
d
∀i ∈ [1, 2, ...N
p
],
where d = 768 for DeiT-Base. This is imple-
mented as a large p × p convolution with stride
s = p where p = 16. The output from this module
is concatenated with a readout token of the same
size as the remaining tokens.
• The Transformer block, that is also a part of
the encoder, consists of 12 transformer layers
which process these tokens with multi-head self-
attention (MHSA) (Vaswani et al., 2017) modules.
MHSA processes inputs at constant resolution and
can simultaneously attend to global and local fea-
tures.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
760

Table 1: Architecture details of the Reassemble modules. DN and EN refer to depth and ego-motion networks, respectively.
The subscripts of DN refer to the transformer layer from which the respective Reassemble module takes its input (see Figure
1). Input image size is H ×W , p refers to the patch size, N
p
= H ·W /p
2
refers to the number of patches from the image, and
d refers to the feature dimension of the transformer features.
Operation Input size Output size Function
Parameters
(DN
3
, DN
6
, DN
9
, DN
12
, EN)
Read (N
p
+ 1)× d N
p
× d Drop readout token −
Concatenate N
p
× d d × H/p ×W /p Transpose and Unflatten −
Pointwise Convolution d ×H/p ×W /p N
c
× H/p ×W /p N
c
channels N
c
= [96,768,1536, 3072,2048]
Strided Convolution N
c
× H/p ×W /p N
c
× H/2p ×W /2p k × k convolution, Stride= 2, N
c
channels, padding= 1 k = [−,−,−,3, −]
Transpose Convolution N
c
× H/p ×W /p N
c
× H/s ×W /s p/s × p/s deconvolution, stride= p/s, N
c
channels s = [4, 8,−,−,−]
• Four Reassemble modules in the decoder, which
are responsible for extracting image-like features
from the 3
rd
, 6
th
, 9
th
, and 12
th
(final) transformer
layers by dropping the readout token and concate-
nating the remaining tokens in 2D. This is fol-
lowed by pointwise convolutions to change the
number of channels, and transpose convolution
in the first two reassemble modules to upsample
the representations (corresponding to T
3
and T
6
in
Figure 1). To make the transformer network com-
parable to its convolutional counterparts, we in-
crease the number of channels in the pointwise
convolutions of the last three Reassemble mod-
ules by a factor of 4 with respect to DPT. The ex-
act architecture of the Reassemble modules can be
found in Table 1.
• Four Fusion modules in the decoder, based on
RefineNet (Lin et al., 2017). They progressively
fuse information from the Reassemble modules
with information passing through the decoder, and
upsample the features by 2 at each stage. Un-
like DPT, we enable batch normalization in the
decoder as it was found to be helpful for self-
supervised depth prediction. We also reduce the
number of channels in the Fusion block to 96 from
256 in DPT.
• Four Head modules at the end of each Fusion
module to predict depth at 4 scales following
previous self-supervised methods (Godard et al.,
2019). Unlike DPT, the Head modules use 2 con-
volutions instead of 3 as we found no difference
in performance. For further details of the Head
modules, refer to Table 2.
Table 2: Architecture details of Head modules in Figure 1.
Layers
32 3 × 3 Convolutions, stride=1, padding= 1
ReLU
Bilinear Interpolation to upsample by 2
32 Pointwise Convolutions
Sigmoid
3.1.2 Ego-motion Network
For the ego-motion network, we adapt DeiT-Base
(Touvron et al., 2021) in the encoder. Since the input
to the transformer for the ego-motion network con-
sists of two images concatenated along the channel di-
mension, we repeat the embedding layer accordingly.
We use a Reassemble module to pass transformer to-
kens to the decoder. For details on the structure of
this Reassemble module, refer to Table 1. We adopt
the decoder for the ego-motion network from Mon-
odepth2 (Godard et al., 2019).
When both depth and ego-motion networks use
transformers as described above, we refer to the re-
sulting architecture as Monocular Transformer Struc-
ture from Motion Learner (MT-SfMLearner).
3.2 Appearance-based Losses
Following contemporary self-supervised monocular
depth estimation methods, we adopt the appearance-
based losses and an auto-masking procedure from the
CNN-based Monodepth2 (Godard et al., 2019) for
the above described transformer-based architecture
as well. We employ a photometric reprojection loss
composed of the pixel-wise `
1
distance and the Struc-
tural Similarity (SSIM) between the real and synthe-
sized target images, along with a multi-scale edge-
aware smoothness loss on the depth predictions. We
also use auto-masking to disregard the temporally sta-
tionary pixels in the image triplets. Furthermore, we
reduce texture-copy artifacts by calculating the total
loss after upscaling the depths, predicted at 4 scales,
from intermediate decoder layers to the input resolu-
tion.
3.3 Intrinsics
Accurate camera intrinsics given by
K =
f
x
0 c
x
0 f
y
c
y
0 0 1
, (2)
Transformers in Self-Supervised Monocular Depth Estimation with Unknown Camera Intrinsics
761

are essential to self-supervised depth estimation as
can be seem from Equation 1. However, the intrin-
sics may vary within a dataset with videos collected
from different camera setups, or over a long period
of time. These parameters can also be unknown for
crowdsourced datasets.
We address this by introducing an intrinsics esti-
mation module. We modify the ego-motion network,
which takes a pair of consecutive images as input, and
learns to estimate the focal length and principal point
along with the translation and rotation. Specifically,
we add a convolutional path in the ego-motion de-
coder to learn the intrinsics. The decoder features be-
fore activation from the penultimate layer are passed
through a global average pooling layer, followed by
two branches of pointwise convolutions to reduce the
number of channels from 256 to 2. One branch uses
a softplus activation to estimate focal lengths along
x and y axes as the focal length is always positive.
The other branch doesn’t use any activation to esti-
mate the principal point as it has no such constraint.
Note that the ego-motion decoder is the same for both
the convolutional as well as transformer architectures.
Consequently, the intrinsics estimation method can be
modularly utilized with both architectures. Figure 1
demonstrates MT-SfMLearner with learned intrinsics.
4 RESULTS
In this section, we perform a comparative anal-
ysis between our transformer-based method, MT-
SfMLearner, and the existing CNN-based methods
for self-supervised monocular depth estimation. We
also perform a contrastive study on the architectures
for the depth and ego-motion networks to evaluate
their impact on the prediction accuracy, robustness to
natural corruptions and adversarial attacks, and the
run-time computational and energy efficiency. Fi-
nally, we analyze the correctness and run-time effi-
ciency of intrinsics predictions, and also study its im-
pact on the accuracy and robustness of depth estima-
tion.
4.1 Implementation Details
4.1.1 Dataset
We report all results on the Eigen Split (Eigen et al.,
2014) of KITTI (Geiger et al., 2013) dataset after re-
moving the static frames as per (Zhou et al., 2017),
unless stated otherwise. This split contains 39, 810
training, 4424 validation, and 697 test images, respec-
tively. All results are reported on the per-image scaled
dense depth prediction without post-processing (Go-
dard et al., 2019), unless stated otherwise.
4.1.2 Training Settings
The networks are implemented in PyTorch (Paszke
et al., 2019) and trained on a TeslaV100 GPU for
20 epochs at a resolution of 640 × 192 with batch-
size 12. MT-SfMLearner is further trained at 2 more
resolutions - 416 × 128 and 1024 × 320, with batch-
sizes of 12 and 2, respectively for experiments in Sec-
tion 4.2. The depth and ego-motion encoders are ini-
tialized with ImageNet (Deng et al., 2009) pre-trained
weights. We use the Adam (Kingma and Ba, 2014)
optimizer for CNN-based networks (in Sections 4.3
and 4.4) and AdamW (Loshchilov and Hutter, 2017)
optimizer for transformer-based networks with initial
learning rates of 1e
−4
and 1e
−5
, respectively. The
learning rate is decayed after 15 epochs by a factor
of 10. Both optimizers use β
1
= 0.9 and β
2
= 0.999.
4.2 Depth Estimation Performance
First we compare MT-SfMLearner, where both depth
and ego-motion networks are transformer-based, with
the existing fully convolutional neural networks for
their accuracy on self-supervised monocular depth es-
timation. Their performance is evaluated using met-
rics from (Eigen et al., 2014) up to a fixed range of
80 m as shown in Table 3. We compare the meth-
ods at different input image sizes clustered into cat-
egories of Low-Resolution (LR), Medium-Resolution
(MR), and High-Resolution (HR). We do not compare
against methods that use ground-truth semantic labels
during training. All methods assume known ground-
truth camera intrinsics.
We observe that MT-SfMLearner is able to
achieve comparable performance at all resolutions un-
der error as well as accuracy metrics. This includes
methods that also utilize a heavy encoder such as
ResNet-101 (Johnston and Carneiro, 2020) and Pack-
Net (Guizilini et al., 2020).
Online Benchmark. We also measure the perfor-
mance of MT-SfMLearner on the KITTI Online
Benchmark for depth prediction
1
using the metrics
from (Uhrig et al., 2017). We train on an image size
of 1024 × 320, and add the G2S loss (Chawla et al.,
2021) for obtaining predictions at metric scale. Re-
sults ordered by their rank are shown in Table 4. The
performance of MT-SfMLearner is on par with state-
of-the-art self-supervised methods, and outperforms
1
http://www.cvlibs.net/datasets/kitti/eval depth.php?
benchmark=depth prediction. See under MT-SfMLearner.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
762
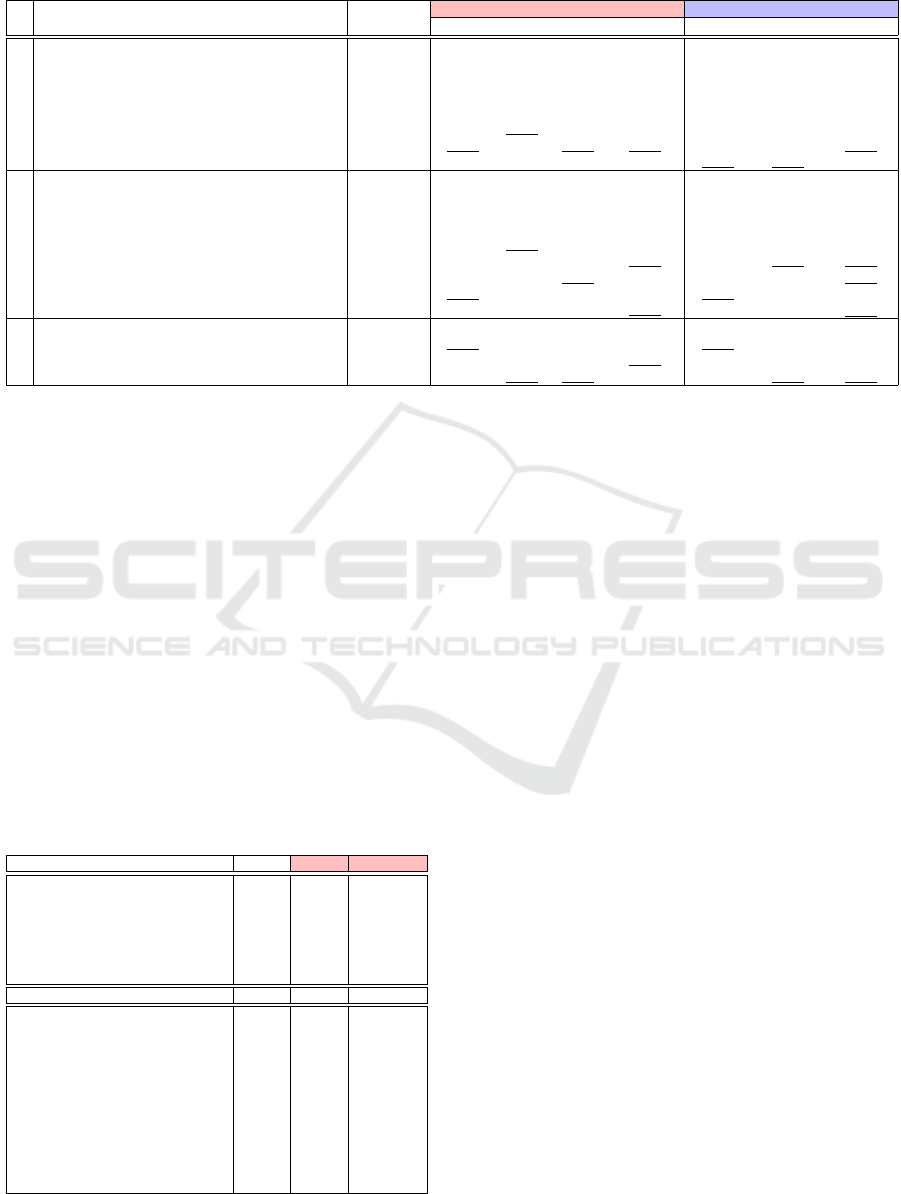
Table 3: Quantitative results comparing MT-SfMLearner with existing methods on KITTI Eigen split. For each category of
image sizes, the best results are displayed in bold, and the second best results are underlined.
Methods Resolution
Error↓ Accuracy↑
Abs Rel Sq Rel RMSE RMSE log δ < 1.25 δ < 1.25
2
δ < 1.25
3
LR
SfMLearner(Zhou et al., 2017) 416×128 0.208 1.768 6.856 0.283 0.678 0.885 0.957
GeoNet (Yin and Shi, 2018) 416×128 0.155 1.296 5.857 0.233 0.793 0.931 0.973
Vid2Depth (Mahjourian et al., 2018) 416×128 0.163 1.240 6.220 0.250 0.762 0.916 0.968
Struct2Depth (Casser et al., 2019) 416×128 0.141 1.026 5.291 0.215 0.816 0.945 0.979
Roussel et al. (Roussel et al., 2019) 416×128 0.179 1.545 6.765 0.268 0754 0916 0.966
VITW (Gordon et al., 2019) 416×128 0.129 0.982 5.230 0.213 0.840 0.945 0.976
Monodepth2 (Godard et al., 2019) 416×128 0.128 1.087 5.171 0.204 0.855 0.953 0.978
MT-SfMLearner (Ours) 416×128 0.125 0.905 5.096 0.203 0.851 0.952 0.980
MR
CC (Ranjan et al., 2019) 832×256 0.140 1.070 5.326 0.217 0.826 0.941 0.975
SC-SfMLearner (Bian et al., 2019) 832×256 0.137 1.089 5.439 0.217 0.830 0.942 0.975
Monodepth2 (Godard et al., 2019) 640×192 0.115 0.903 4.863 0.193 0.877 0.959 0.981
SG Depth (Klingner et al., 2020) 640×192 0.117 0.907 4.844 0.194 0.875 0.958 0.980
PackNet-SfM (Guizilini et al., 2020) 640×192 0.111 0.829 4.788 0.199 0.864 0.954 0.980
Poggi et. al (Poggi et al., 2020) 640×192 0.111 0.863 4.756 0.188 0.881 0.961 0.982
Johnston & Carneiro (Johnston and Carneiro, 2020) 640×192 0.106 0.861 4.699 0.185 0.889 0.962 0.982
HR-Depth (Lyu et al., 2020) 640×192 0.109 0.792 4.632 0.185 0.884 0.962 0.983
MT-SfMLearner (Ours) 640×192 0.112 0.838 4.771 0.188 0.879 0.960 0.982
HR
Packnet-SfM (Guizilini et al., 2020) 1280×384 0.107 0.803 4.566 0.197 0.876 0.957 0.979
HR-Depth (Lyu et al., 2020) 1024×320 0.106 0.755 4.472 0.181 0.892 0.966 0.984
G2S (Chawla et al., 2021) 1024×384 0.109 0.844 4.774 0.194 0.869 0.958 0.981
MT-SfMLearner (Ours) 1024×320 0.104 0.799 4.547 0.181 0.893 0.963 0.982
several supervised methods. This further confirms
that the transformer-based method can achieve com-
parable performance to the convolutional neural net-
works for self-supervised depth estimation.
4.3 Contrastive Study
We saw in the previous section that MT-SfMLearner
performs competently on independent and identically
distributed (i.i.d.) test set with respect to the state-
of-the-art. However, networks that perform well
on an i.i.d. test set may still learn shortcut fea-
Table 4: Quantitative comparison of unscaled dense depth
prediction on the KITTI Depth Prediction Benchmark (on-
line server). Supervised training with ground truth depths is
denoted by D. Use of monocular sequences or stereo pairs is
represented by M and S, respectively. Seg represents addi-
tional supervised semantic segmentation training. The use
of GPS for multi-modal self-supervision is denoted by G.
Method Train SILog↓ SqErrRel↓
DORN (Fu et al., 2018) D 11.77 2.23
SORD (Diaz and Marathe, 2019) D 12.39 2.49
VNL (Yin et al., 2019) D 12.65 2.46
DS-SIDENet (Ren et al., 2019) D 12.86 2x.87
PAP (Zhang et al., 2019) D 13.08 2.72
Guo et al. (Guo et al., 2018) D+S 13.41 2.86
G2S (Chawla et al., 2021) M+G 14.16 3.65
Ours M+G 14.25 3.72
Monodepth2 (Godard et al., 2019) M+S 14.41 3.67
DABC (Li et al., 2018b) D 14.49 4.08
SDNet (Ochs et al., 2019) D+Seg 14.68 3.90
APMoE (Kong and Fowlkes, 2019) D 14.74 3.88
CSWS (Li et al., 2018a) D 14.85 348
HBC (Jiang and Huang, 2019) D 15.18 3.79
SGDepth (Klingner et al., 2020) M+Seg 15.30 5.00
DHGRL (Zhang et al., 2018) D 15.47 4.04
PackNet-SfM (Guizilini et al., 2020) M+V 15.80 4.73
MultiDepth (Liebel and K
¨
orner, 2019) D 16.05 3.89
LSIM (Goldman et al., 2019) S 17.92 6.88
Monodepth (Godard et al., 2017) S 22.02 20.58
tures that are non-robust and generalize poorly to
out-of-distribution (o.o.d.) datasets (Geirhos et al.,
2020). Since self-supervised monocular depth es-
timation networks concurrently train an ego-motion
network (see Equation 1), we investigate the impact
of each network’s architecture on depth estimation.
We consider both Convolutional (C) and Trans-
former (T) networks for depth and ego-motion esti-
mation. The resulting four combinations of (Depth
Network, Ego-Motion Network) architectures are (C,
C), (C, T), (T, C), and (T, T), ordered on the ba-
sis of their increasing influence of transformers on
depth estimation. To compare our transformer-based
method fairly with convolutional networks, we uti-
lize Monodepth2 (Godard et al., 2019) with a ResNet-
101 (He et al., 2016) encoder. All four combinations
are trained thrice using the settings described in Sec-
tion 4.1 for an image size of 640 × 192. All combina-
tions assume known ground-truth camera intrinsics.
4.3.1 Performance
For the four combinations, we report the best perfor-
mance on i.i.d. in Table 5, and visualize the depth
predictions for the same in Figure 2. The i.i.d. test set
used for comparison is same as in Section 4.2.
We observe from Table 5 that the combination of
transformer-based depth and ego-motion networks i.e
MT-SfMLearner performs best under two of the error
metrics as well as two of the accuracy metrics. The
remaining combinations perform comparably on all
the metrics.
From Figure 2, we observe more uniform esti-
mates for larger objects like vehicles, vegetation, and
buildings when depth is learned using transformers.
Transformers in Self-Supervised Monocular Depth Estimation with Unknown Camera Intrinsics
763
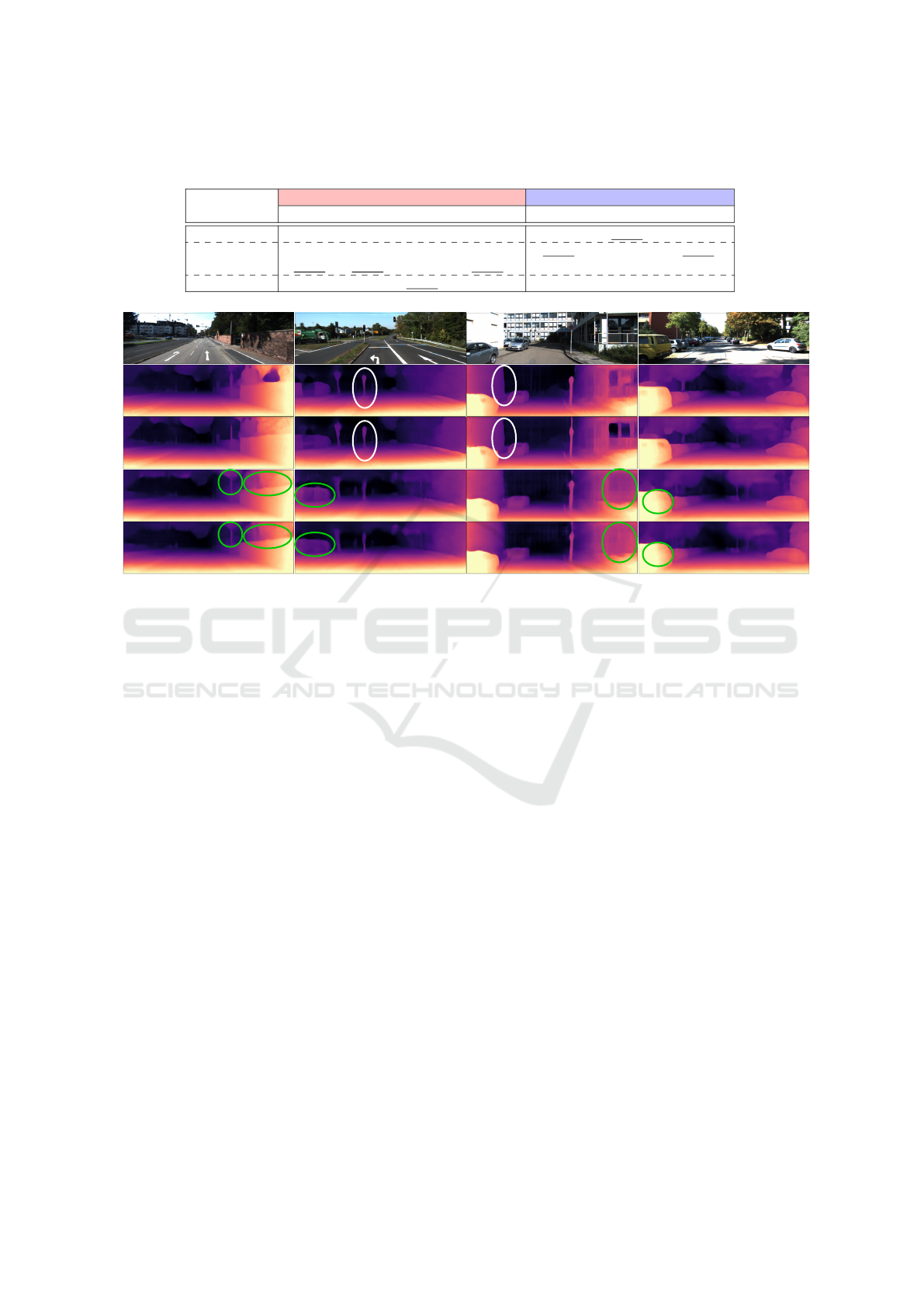
Table 5: Quantitative results on KITTI Eigen split for all four architecture combinations of depth and ego-motion networks.
The best results are displayed in bold, the second best are underlined.
Architecture
Error↓ Accuracy↑
Abs Rel Sq Rel RMSE RMSE log δ < 1.25 δ < 1.25
2
δ < 1.25
3
C, C 0.111 0.897 4.865 0.193 0.881 0.959 0.980
C, T 0.113 0.874 4.813 0.192 0.880 0.960 0.981
T, C 0.112 0.843 4.766 0.189 0.879 0.960 0.982
T, T 0.112 0.838 4.771 0.188 0.879 0.960 0.982
InputC, CC, TT, CT, T
Figure 2: Disparity maps on KITTI for qualitative comparison of all four architecture combinations of depth and ego-motion
networks. Example areas where the global receptive field of transformer is advantageous are highlighted in green. Example
areas where local receptive field of CNNs is advantageous are highlighted in white.
Transformers are also less affected by reflection from
windows of vehicles and buildings. This is likely be-
cause of the larger receptive fields of the self-attention
layers, which lead to more globally coherent predic-
tions. On the other hand, convolutional networks pro-
duce sharper boundaries, and perform better on thin-
ner objects such as traffic signs and poles. This is
likely because of the inherent inductive bias for spa-
tial locality present in convolutional layers.
4.3.2 Robustness
While the different combinations perform compara-
bly on the i.i.d. dataset, they may differ in robustness
and generalizability. Therefore, we study the impact
of natural corruptions and adversarial attacks on the
depth performance using the following:
• Natural Corruptions. Following (Hendrycks
and Dietterich, 2019) and (Michaelis et al.,
2019), we generate 15 corrupted versions of the
KITTI i.i.d. test set at the highest severity(= 5).
These natural corruptions fall under 4 categories
- noise (Gaussian, shot, impulse), blur (defocus,
glass, motion, zoom), weather (snow, frost, fog,
brightness), and digital (contrast, elastic, pixelate,
JPEG).
• Projected Gradient Descent (PGD) Ad-
versarial Examples. Adversarial attacks
make imperceptible (to humans) changes to
input images to create adversarial examples
that fool networks. We generate adversar-
ial examples from the i.i.d. test set using
PGD (Madry et al., 2018) at attack strength
ε ∈ {0.25,0.5,1.0,2.0,4.0,8.0,16.0,32.0}.
The gradients are calculated with respect to
the training loss. Following (Kurakin et al.,
2016), the perturbation is accumulated over
min(ε + 4, d1.25 · εe) iterations with a step-size of
1. When the test image is from the beginning or
end of a KITTI sequence, the appearance-based
loss is only calculated for the feasible pair of
images.
• Symmetrically Flipped Adversarial Examples.
Inspired by (Wong et al., 2020), we generate
these adversarial examples to fool the networks
into predicting flipped estimates. For this, we use
the gradients of the RMSE loss, where the targets
are symmetrical horizontal and vertical flips of the
i.i.d. predictions. This evaluation is conducted at
attack strength ε ∈ {1.0, 2.0, 4.0}, similar to the
PGD attack described above.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
764
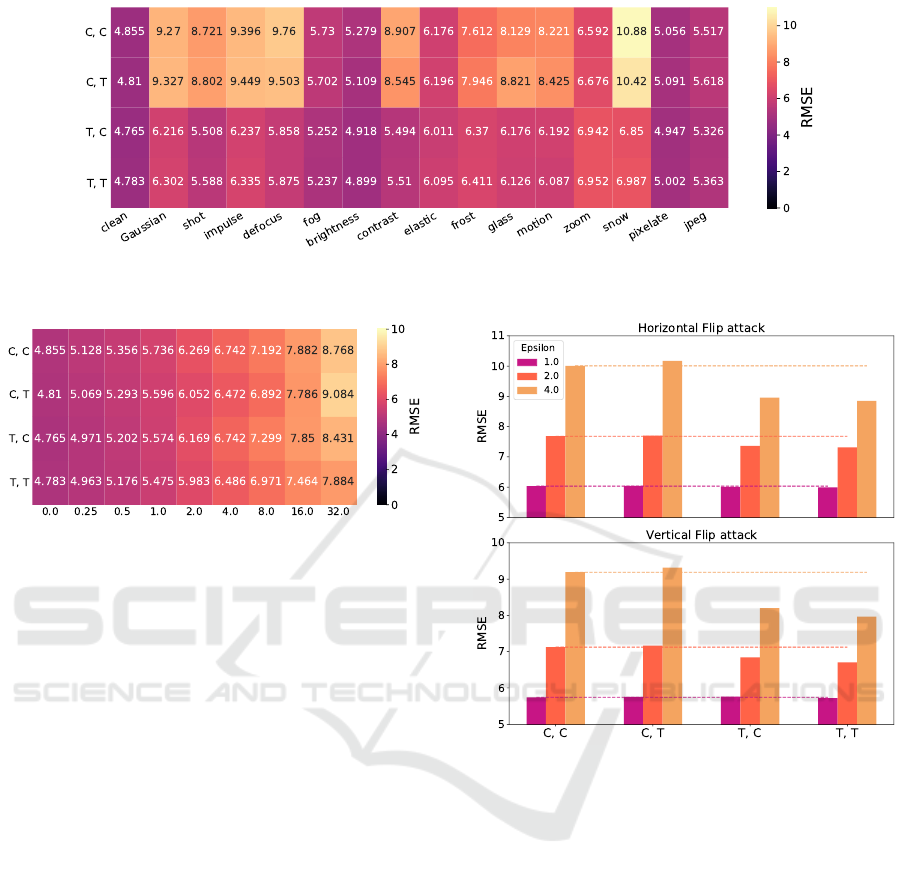
Figure 3: RMSE for natural corruptions of KITTI for all four combinations of depth and ego-motion networks. The i.i.d.
evaluation is denoted by clean.
Figure 4: RMSE for adversarial corruptions of KITTI gen-
erated using PGD at all attack strengths (0.0 to 32.0) for all
four combinations of depth and ego-motion networks. At-
tack strength 0.0 refers to i.i.d. evaluation.
We report the mean RMSE across three training
runs on natural corruptions, PGD adversarial exam-
ples, and symmetrically flipped adversarial examples
in Figures 3, 4, and 5, respectively.
Figure 3 demonstrates a significant improvement
in the robustness to all the natural corruptions when
learning depth with transformers instead of convo-
lutional networks. Figure 4 further shows a general
improvement in adversarial robustness when learn-
ing either depth or ego-motion with transformers in-
stead of convolutional networks. Finally, Figure 5
shows an improvement in robustness to symmetri-
cally flipped adversarial attacks when depth is learned
using transformers instead of convolutional networks.
Furthermore, depth estimation is most robust when
both depth and ego-motion are learned using trans-
formers.
Therefore, MT-SfMLearner, where both depth and
ego-motion and learned with transformers, provides
the highest robustness and generalizability, in line
with the studies on image classification (Paul and
Chen, 2021; Bhojanapalli et al., 2021). This can be
attributed to their global receptive field, which allows
for better adjustment to the localized deviations by ac-
counting for the global context of the scene.
Figure 5: RMSE for adversarial corruptions of KITTI gen-
erated using horizontal and vertical flip attacks for all four
combinations of depth and ego-motion networks.
4.4 Intrinsics
Here, we evaluate the accuracy of our proposed
method for self-supervised learning of camera intrin-
sics and its impact on the depth estimation perfor-
mance. As shown in Table 6, the percentage error for
intrinsics estimation is low for both convolutional and
transformer-based methods trained on an image size
of 640 × 192. Moreover, the depth error as well accu-
racy metrics are both similar to when the ground truth
intrinsics are known a priori. This is also observed in
Figure 6 where the learning of intrinsics causes no ar-
tifacts in depth estimation.
We also evaluate the models trained with learned
intrinsics on all 15 natural corruptions as well as on
PGD and symmetrically flipped adversarial examples.
We report the mean RMSE (µRMSE) across all cor-
ruptions in Table 7. The RMSE for depth estimation
Transformers in Self-Supervised Monocular Depth Estimation with Unknown Camera Intrinsics
765
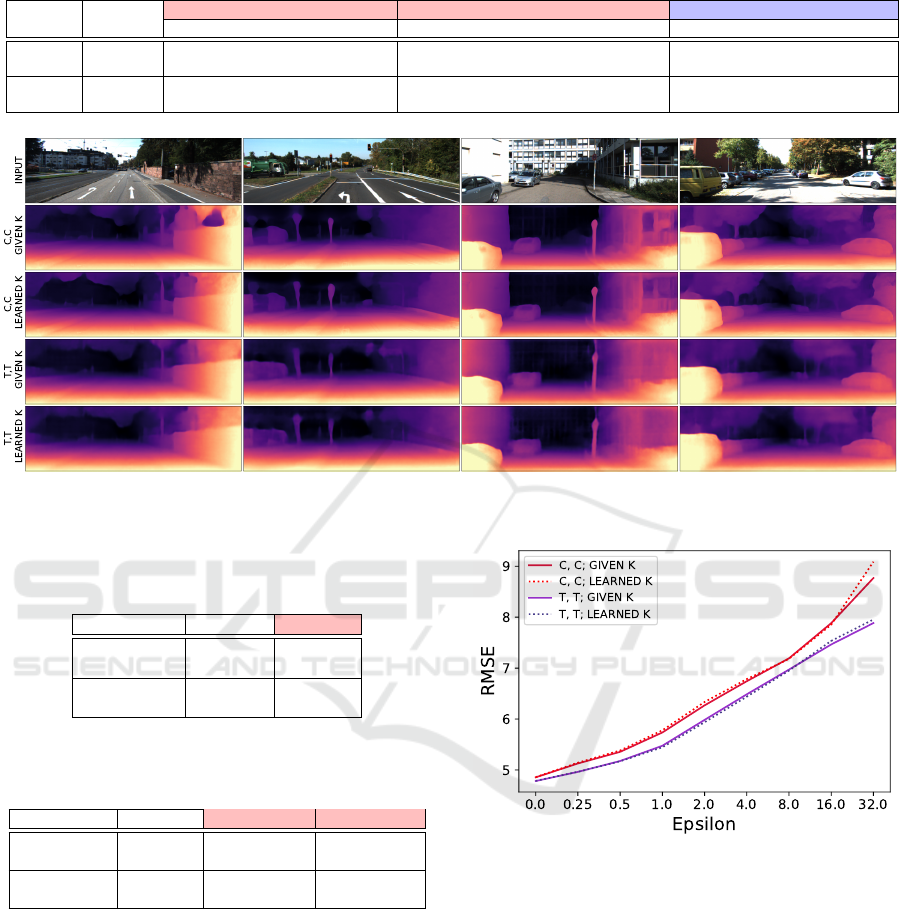
Table 6: Percentage error for intrinsics prediction and impact on depth estimation for KITTI Eigen split.
Network Intrinsics
Intrinsics Error(%) ↓ Depth Error↓ Depth Accuracy↑
f
x
c
x
f
y
c
y
Abs Rel Sq Rel RMSE RMSE log δ < 1.25 δ < 1.25
2
δ < 1.25
3
C,C
Given - - - - 0.111 0.897 4.865 0.193 0.881 0.959 0.980
Learned -1.889 -2.332 2.400 -9.372 0.113 0.881 4.829 0.193 0.879 0.960 0.981
T,T
Given - - - - 0.112 0.838 4.771 0.188 0.879 0.960 0.982
Learned -1.943 -0.444 3.613 -16.204 0.112 0.809 4.734 0.188 0.878 0.960 0.982
Figure 6: Disparity maps for qualitative comparison on KITTI, when trained with and without intrinsics (K). The second and
fourth rows are same as the second and the fifth rows in Figure 2.
Table 7: Mean RMSE (µRMSE) for natural corruptions of
KITTI, when trained with and without ground-truth intrin-
sics.
Architecture Intrinsics µRMSE↓
C, C
Given 7.683
Learned 7.714
T, T
Given 5.918
Learned 5.939
Table 8: Mean RMSE (µRMSE) for horizontal (H) and ver-
tical (V) adversarial flips of KITTI, when trained with and
without ground-truth intrinsics.
Architecture Intrinsics µRMSE↓ (H) µRMSE↓ (V)
C, C
Given 7.909 7.354
Learned 7.641 7.196
T, T
Given 7.386 6.795
Learned 7.491 6.929
on adversarial examples generated by PGD method
for all strengths is shown in Figure 7. The mean
RMSE (µRMSE) across all attack strengths for hor-
izontally flipped and vertically flipped adversarial ex-
amples is shown in Table 8.
We observe that the robustness to natural corrup-
tions and adversarial attacks is maintained by both
architectures when the intrinsics are learned simul-
taneously. Furthermore, similar to the scenario with
known ground truth intrinsics, MT-SfMLearner with
learned intrinsics has higher robustness than its con-
volutional counterpart.
Figure 7: Mean RMSE for adversarial corruptions of
KITTI generated using PGD, when trained with and without
ground-truth intrinsics (K).
4.5 Efficiency
We further compare the networks on their computa-
tional and energy efficiency to examine their suitabil-
ity for real-time applications.
In Table 9, we report the mean inference speed in
frames per second (fps) and the mean inference en-
ergy consumption in Joules per frame for depth and
intrinsics estimation for both architectures. These
metrics are computed over 10,000 forward passes at
a resolution of 640 × 192 on an NVidia GeForce RTX
2080 Ti.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
766

Table 9: Inference Speed (frames per second) and Energy
Consumption (Joules per frame) for depth and intrinsics es-
timation using CNN- and transformer-based architectures.
Architecture Estimate Speed↑ Energy↓
C,C
Depth 84.132 3.206
Intrinsics 97.498 2.908
T,T
Depth 40.215 5.999
Intrinsics 60.190 4.021
Both architectures run depth and intrinsics esti-
mation in real-time with an inference speed > 30
fps. However, the transformer-based method con-
sumes higher energy and is computationally more de-
manding than its convolutional counterpart.
5 CONCLUSION
This work is the first to investigate the im-
pact of transformer architecture on the SfM in-
spired self-supervised monocular depth estimation.
Our transformer-based method MT-SfMLearner per-
forms comparably against contemporary convolu-
tional methods on the KITTI depth prediction bench-
mark. Our contrastive study additionally demon-
strates that while CNNs provide local spatial bias,
especially for thinner objects and around boundaries,
transformers predict uniform and coherent depths, es-
pecially for larger objects due to their global recep-
tive field. We observe that transformers in the depth
network result in higher robustness to natural corrup-
tions, and transformers in both depth, as well as the
ego-motion network, result in higher robustness to
adversarial attacks. With our proposed approach to
self-supervised camera intrinsics estimation, we also
demonstrate how the above conclusions hold even
when the focal length and principal point are learned
along with depth and ego-motion. However, trans-
formers are computationally more demanding and
have lower energy efficiency than their convolutional
counterparts. Thus, we contend that this work assists
in evaluating the trade-off between performance, ro-
bustness, and efficiency of self-supervised monocu-
lar depth estimation for selecting the suitable archi-
tecture.
REFERENCES
Aich, S., Vianney, J. M. U., Islam, M. A., Kaur, M., and
Liu, B. (2021). Bidirectional attention network for
monocular depth estimation. In IEEE International
Conference on Robotics and Automation (ICRA).
Bhojanapalli, S., Chakrabarti, A., Glasner, D., Li, D., Un-
terthiner, T., and Veit, A. (2021). Understanding
robustness of transformers for image classification.
arXiv preprint arXiv:2103.14586.
Bian, J., Li, Z., Wang, N., Zhan, H., Shen, C.,
Cheng, M.-M., and Reid, I. (2019). Unsupervised
scale-consistent depth and ego-motion learning from
monocular video. In Advances in Neural Information
Processing Systems, pages 35–45.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In European Conference on
Computer Vision, pages 213–229. Springer.
Caron, M., Touvron, H., Misra, I., J
´
egou, H., Mairal, J., Bo-
janowski, P., and Joulin, A. (2021). Emerging prop-
erties in self-supervised vision transformers. In Pro-
ceedings of the International Conference on Computer
Vision (ICCV).
Casser, V., Pirk, S., Mahjourian, R., and Angelova,
A. (2019). Depth prediction without the sensors:
Leveraging structure for unsupervised learning from
monocular videos. In Proceedings of the AAAI Con-
ference on Artificial Intelligence, volume 33, pages
8001–8008.
Chawla, H., Jukola, M., Brouns, T., Arani, E., and Zonooz,
B. (2020). Crowdsourced 3d mapping: A combined
multi-view geometry and self-supervised learning ap-
proach. In 2020 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
4750–4757. IEEE.
Chawla, H., Varma, A., Arani, E., and Zonooz, B.
(2021). Multimodal scale consistency and awareness
for monocular self-supervised depth estimation. In
2021 IEEE International Conference on Robotics and
Automation (ICRA). IEEE.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Diaz, R. and Marathe, A. (2019). Soft labels for ordinal
regression. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
4738–4747.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. ICLR.
Eigen, D., Puhrsch, C., and Fergus, R. (2014). Depth map
prediction from a single image using a multi-scale
deep network. In Advances in neural information pro-
cessing systems, pages 2366–2374.
Fu, H., Gong, M., Wang, C., Batmanghelich, K., and
Tao, D. (2018). Deep ordinal regression network for
monocular depth estimation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition, pages 2002–2011.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Transformers in Self-Supervised Monocular Depth Estimation with Unknown Camera Intrinsics
767

Geirhos, R., Jacobsen, J.-H., Michaelis, C., Zemel, R.,
Brendel, W., Bethge, M., and Wichmann, F. A. (2020).
Shortcut learning in deep neural networks. Nature
Machine Intelligence, 2(11):665–673.
Godard, C., Mac Aodha, O., and Brostow, G. J. (2017). Un-
supervised monocular depth estimation with left-right
consistency. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
270–279.
Godard, C., Mac Aodha, O., Firman, M., and Brostow, G. J.
(2019). Digging into self-supervised monocular depth
estimation. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 3828–
3838.
Goldman, M., Hassner, T., and Avidan, S. (2019). Learn
stereo, infer mono: Siamese networks for self-
supervised, monocular, depth estimation. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition Workshops, pages 0–0.
Gordon, A., Li, H., Jonschkowski, R., and Angelova, A.
(2019). Depth from videos in the wild: Unsupervised
monocular depth learning from unknown cameras.
Guizilini, V., Ambrus, R., Pillai, S., Raventos, A., and
Gaidon, A. (2020). 3d packing for self-supervised
monocular depth estimation. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 2485–2494.
Guo, X., Li, H., Yi, S., Ren, J., and Wang, X. (2018). Learn-
ing monocular depth by distilling cross-domain stereo
networks. In Proceedings of the European Conference
on Computer Vision (ECCV), pages 484–500.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hendrycks, D. and Dietterich, T. (2019). Benchmarking
neural network robustness to common corruptions and
perturbations. Proceedings of the International Con-
ference on Learning Representations.
Jiang, H. and Huang, R. (2019). Hierarchical binary classi-
fication for monocular depth estimation. In 2019 IEEE
International Conference on Robotics and Biomimet-
ics (ROBIO), pages 1975–1980. IEEE.
Johnston, A. and Carneiro, G. (2020). Self-supervised
monocular trained depth estimation using self-
attention and discrete disparity volume. In Proceed-
ings of the ieee/cvf conference on computer vision and
pattern recognition, pages 4756–4765.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Klingner, M., Term
¨
ohlen, J.-A., Mikolajczyk, J., and
Fingscheidt, T. (2020). Self-Supervised Monocular
Depth Estimation: Solving the Dynamic Object Prob-
lem by Semantic Guidance. In ECCV.
Kong, S. and Fowlkes, C. (2019). Pixel-wise attentional
gating for scene parsing. In 2019 IEEE Winter Con-
ference on Applications of Computer Vision (WACV),
pages 1024–1033. IEEE.
Kurakin, A., Goodfellow, I., Bengio, S., et al. (2016). Ad-
versarial examples in the physical world.
Lee, J. H., Han, M.-K., Ko, D. W., and Suh, I. H. (2019).
From big to small: Multi-scale local planar guid-
ance for monocular depth estimation. arXiv preprint
arXiv:1907.10326.
Li, B., Dai, Y., and He, M. (2018a). Monocular depth es-
timation with hierarchical fusion of dilated cnns and
soft-weighted-sum inference. Pattern Recognition,
83:328–339.
Li, R., Xian, K., Shen, C., Cao, Z., Lu, H., and Hang, L.
(2018b). Deep attention-based classification network
for robust depth prediction. In Asian Conference on
Computer Vision (ACCV).
Li, Z., Liu, X., Drenkow, N., Ding, A., Creighton,
F. X., Taylor, R. H., and Unberath, M. (2020). Re-
visiting stereo depth estimation from a sequence-
to-sequence perspective with transformers. arXiv
preprint arXiv:2011.02910.
Liebel, L. and K
¨
orner, M. (2019). Multidepth: Single-
image depth estimation via multi-task regression and
classification. In 2019 IEEE Intelligent Transporta-
tion Systems Conference (ITSC), pages 1440–1447.
IEEE.
Lin, G., Milan, A., Shen, C., and Reid, I. (2017). Refinenet:
Multi-path refinement networks for high-resolution
semantic segmentation. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1925–1934.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. arXiv
preprint arXiv:2103.14030.
Lopez, M., Mari, R., Gargallo, P., Kuang, Y., Gonzalez-
Jimenez, J., and Haro, G. (2019). Deep single image
camera calibration with radial distortion. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 11817–11825.
Loshchilov, I. and Hutter, F. (2017). Decoupled weight de-
cay regularization. arXiv preprint arXiv:1711.05101.
Lyu, X., Liu, L., Wang, M., Kong, X., Liu, L., Liu, Y., Chen,
X., and Yuan, Y. (2020). Hr-depth: high resolution
self-supervised monocular depth estimation. CoRR
abs/2012.07356.
Madry, A., Makelov, A., Schmidt, L., Tsipras, D., and
Vladu, A. (2018). Towards deep learning models
resistant to adversarial attacks. In 6th International
Conference on Learning Representations, ICLR 2018,
Vancouver, BC, Canada, April 30 - May 3, 2018, Con-
ference Track Proceedings. OpenReview.net.
Mahjourian, R., Wicke, M., and Angelova, A. (2018). Un-
supervised learning of depth and ego-motion from
monocular video using 3d geometric constraints. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 5667–5675.
Michaelis, C., Mitzkus, B., Geirhos, R., Rusak, E., Bring-
mann, O., Ecker, A. S., Bethge, M., and Brendel, W.
(2019). Benchmarking robustness in object detection:
Autonomous driving when winter is coming. arXiv
preprint arXiv:1907.07484.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
768

Ochs, M., Kretz, A., and Mester, R. (2019). Sdnet: Seman-
tically guided depth estimation network. In German
Conference on Pattern Recognition, pages 288–302.
Springer.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances
in neural information processing systems, 32:8026–
8037.
Paul, S. and Chen, P.-Y. (2021). Vision transformers are
robust learners. arXiv preprint arXiv:2105.07581.
Poggi, M., Aleotti, F., Tosi, F., and Mattoccia, S. (2020). On
the uncertainty of self-supervised monocular depth es-
timation. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
3227–3237.
Raghu, M., Unterthiner, T., Kornblith, S., Zhang, C., and
Dosovitskiy, A. (2021). Do vision transformers see
like convolutional neural networks? arXiv preprint
arXiv:2108.08810.
Ranftl, R., Bochkovskiy, A., and Koltun, V. (2021). Vision
transformers for dense prediction. ArXiv preprint.
Ranftl, R., Lasinger, K., Hafner, D., Schindler, K., and
Koltun, V. (2020). Towards robust monocular depth
estimation: Mixing datasets for zero-shot cross-
dataset transfer. IEEE Transactions on Pattern Analy-
sis and Machine Intelligence (TPAMI).
Ranjan, A., Jampani, V., Balles, L., Kim, K., Sun, D., Wulff,
J., and Black, M. J. (2019). Competitive collaboration:
Joint unsupervised learning of depth, camera motion,
optical flow and motion segmentation. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 12240–12249.
Ren, H., El-Khamy, M., and Lee, J. (2019). Deep robust
single image depth estimation neural network using
scene understanding. In CVPR Workshops, pages 37–
45.
Roussel, T., Van Eycken, L., and Tuytelaars, T. (2019).
Monocular depth estimation in new environments
with absolute scale. In 2019 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 1735–1741. IEEE.
Strudel, R., Garcia, R., Laptev, I., and Schmid, C. (2021).
Segmenter: Transformer for semantic segmentation.
arXiv preprint arXiv:2105.05633.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and J
´
egou, H. (2021). Training data-efficient
image transformers & distillation through attention.
In International Conference on Machine Learning,
pages 10347–10357. PMLR.
Uhrig, J., Schneider, N., Schneider, L., Franke, U., Brox,
T., and Geiger, A. (2017). Sparsity invariant cnns.
In 2017 international conference on 3D Vision (3DV),
pages 11–20. IEEE.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
neural information processing systems, pages 5998–
6008.
Wong, A., Cicek, S., and Soatto, S. (2020). Targeted adver-
sarial perturbations for monocular depth prediction. In
Advances in neural information processing systems.
Xiang, X., Kong, X., Qiu, Y., Zhang, K., and Lv, N. (2021).
Self-supervised monocular trained depth estimation
using triplet attention and funnel activation. Neural
Processing Letters, pages 1–18.
Yang, G., Tang, H., Ding, M., Sebe, N., and Ricci, E.
(2021). Transformer-based attention networks for
continuous pixel-wise prediction. In ICCV.
Yin, W., Liu, Y., Shen, C., and Yan, Y. (2019). Enforc-
ing geometric constraints of virtual normal for depth
prediction. In Proceedings of the IEEE International
Conference on Computer Vision, pages 5684–5693.
Yin, Z. and Shi, J. (2018). Geonet: Unsupervised learning
of dense depth, optical flow and camera pose. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 1983–1992.
Zhang, Z., Cui, Z., Xu, C., Yan, Y., Sebe, N., and Yang,
J. (2019). Pattern-affinitive propagation across depth,
surface normal and semantic segmentation. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 4106–4115.
Zhang, Z., Xu, C., Yang, J., Tai, Y., and Chen, L. (2018).
Deep hierarchical guidance and regularization learn-
ing for end-to-end depth estimation. Pattern Recogni-
tion, 83:430–442.
Zheng, S., Lu, J., Zhao, H., Zhu, X., Luo, Z., Wang, Y., Fu,
Y., Feng, J., Xiang, T., Torr, P. H., et al. (2021). Re-
thinking semantic segmentation from a sequence-to-
sequence perspective with transformers. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 6881–6890.
Zhou, T., Brown, M., Snavely, N., and Lowe, D. G. (2017).
Unsupervised learning of depth and ego-motion from
video.
Zhuang, B., Tran, Q.-H., Lee, G. H., Cheong, L. F.,
and Chandraker, M. (2019). Degeneracy in self-
calibration revisited and a deep learning solution for
uncalibrated slam. In 2019 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 3766–3773. IEEE.
Transformers in Self-Supervised Monocular Depth Estimation with Unknown Camera Intrinsics
769
