
Detecting Object States vs Detecting Objects: A New Dataset and a
Quantitative Experimental Study
Filippos Gouidis
1,2 a
, Theodore Patkos
1
, Antonis Argyros
1,2 b
and Dimitris Plexousakis
1,2 c
1
Institute of Computer Science, Foundation for Research and Technology, Hellas, Greece
2
Computer Science Department, University of Crete, Hellas, Greece
Keywords:
State Estimation, Object Detection, Object Dataset.
Abstract:
The detection of object states in images (State Detection - SD) is a problem of both theoretical and practical
importance and it is tightly interwoven with other important computer vision problems, such as action recog-
nition and affordance detection. It is also highly relevant to any entity that needs to reason and act in dynamic
domains, such as robotic systems and intelligent agents. Despite its importance, up to now, the research on this
problem has been limited. In this paper, we attempt a systematic study of the SD problem. First, we introduce
the Object State Detection Dataset (OSDD), a new publicly available dataset consisting of more than 19,000
annotations for 18 object categories and 9 state classes. Second, using a standard deep learning framework
used for Object Detection (OD), we conduct a number of appropriately designed experiments, towards an in-
depth study of the behavior of the SD problem. This study enables the setup of a baseline on the performance
of SD, as well as its relative performance in comparison to OD, in a variety of scenarios. Overall, the exper-
imental outcomes confirm that SD is harder than OD and that tailored SD methods need to be developed for
addressing effectively this significant problem.
1 INTRODUCTION
The detection of object states in images is a problem
of both theoretical and practical importance. By ob-
ject state we refer to a condition of that object at a
particular moment in time. Some object states are mu-
tually exclusive (e.g., open/closed), while others may
hold simultaneously (e.g., open, filled, lifted). The
transition from one state to another is, typically, the
result of an action being performed upon the object.
The state(s) in which an object can be found deter-
mine(s) to a large degree its behavior in the context of
its interaction with other objects and entities.
Apart from being a challenging task bearing some
unique characteristics, object state detection (SD) is a
key visual competence, as the successful interaction
of an agent with its environment depends critically on
its ability to solve this problem. SD is also closely re-
lated to other important computer vision and AI prob-
lems, such as action recognition and planning. Sur-
prisingly, the amount of research on this subject re-
a
https://orcid.org/0000-0002-9539-8749
b
https://orcid.org/0000-0001-8230-3192
c
https://orcid.org/0000-0002-0863-8266
Figure 1: Each row contains objects of the same state and
each column contains objects of the same class. The vari-
ance of visual appearance is significantly greater for objects
of the same state than for objects of the same category.
mains low, especially when juxtaposed with the vast
research effort that has been invested over the last
years in related computer vision problems, such as
object detection and image classification.
There are several arguments that attest the signif-
icance of a solution to the SD problem. First, the de-
tection of states is critical for decision making. In
dynamic worlds, the conditions for stopping an action
590
Gouidis, F., Patkos, T., Argyros, A. and Plexousakis, D.
Detecting Object States vs Detecting Objects: A New Dataset and a Quantitative Experimental Study.
DOI: 10.5220/0010898400003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
590-600
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
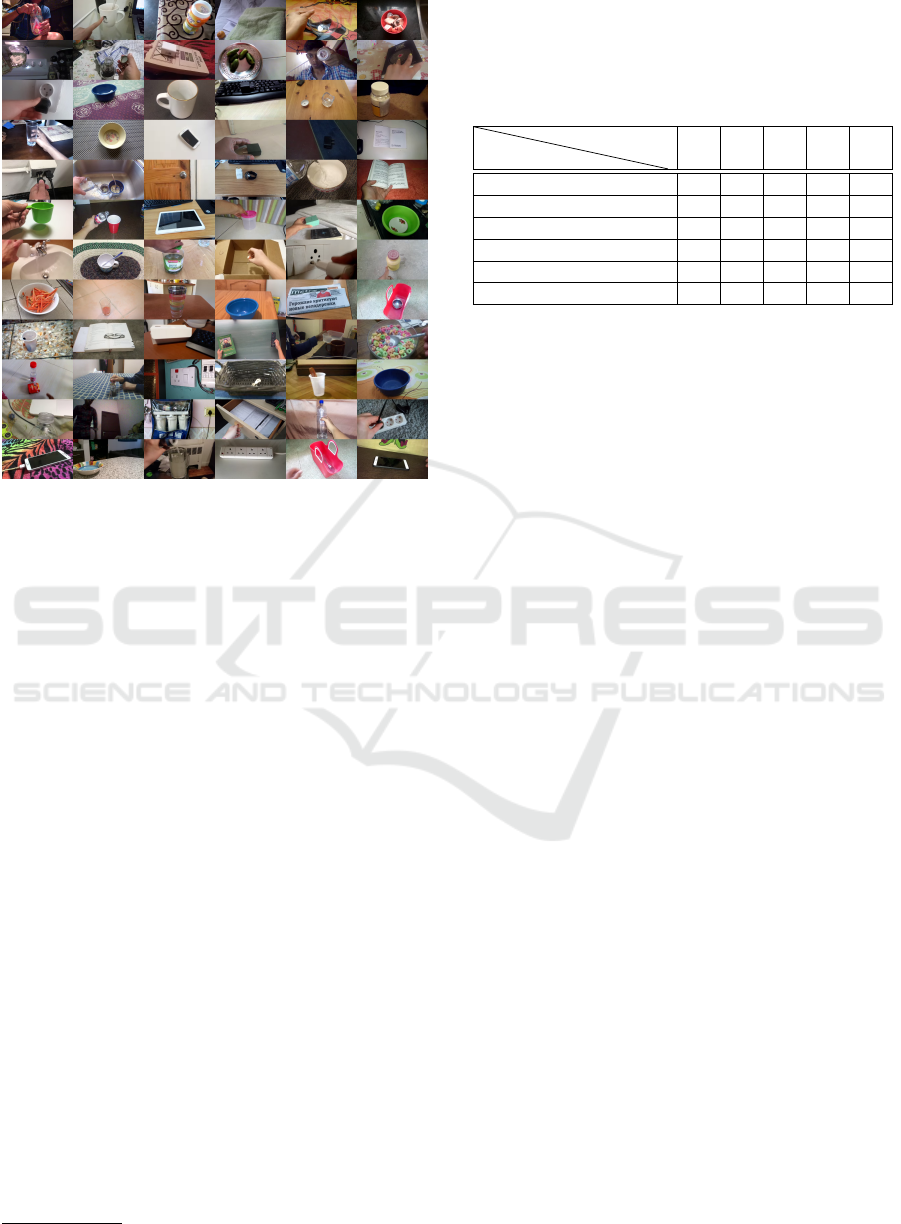
Figure 2: A small sample of the proposed OSDD dataset.
is state-dependent. For example, in order for a glass
to be filled without an overflow its filled state must
be recognized or even predicted on time. Actually, in
many cases, miss-classifying the object state could be
equally or even more detrimental as miss-classifying
its category (e.g., recognizing a bottle as a jar vs. rec-
ognizing a filled bottle as an empty bottle). Second,
inferring correctly the states of objects could facilitate
significantly the recognition of actions. Conversely,
the recognition of an action can provide cues about
the states of objects which were affected by the ac-
tion. SD is also relevant to another active and impor-
tant research area, that of object affordances recog-
nition. The inference of object affordances depends
critically on their current state. For example, many
different kinds of objects
1
could be used for carrying
liquids, provided that they are empty. In this case,
inferring the state of the candidate container is more
important that recognizing its class.
At a first glance, SD appears to be just a special
case of object detection (OD). As an example, one
could specialize a “box” detector to come up with an
“open box” detector. This idea could explain the low
levels of research activity devoted to SD, per se. How-
ever, such an approach lacks scalability as the space
of all object categories times the number of their pos-
sible states is huge. Moreover, there exist some im-
portant differences between the SD and OD problems.
First, the intra-class variation for object states is vastly
1
Bottles, pots, plates, cups, vases amongst others.
Table 1: Objects and states in OSDD. Rows corre-
spond clusters of object categories that may appear in
the same set of states. Columns correspond to five pairs
(P1-P5) of mutually exclusive states. P1: Open/Close,
P2: Empty/Containing Liquid (CL), P3: Empty/Containing
Solid (CS), P4: Plugged/Unplugged, P5: Folded/Unfolded.
Object
Pair
P1 P2 P3 P4 P5
Bottle, Jar, Tub 3 3 3 7 7
Book, Drawer, Door 3 7 7 7 7
Basket, Box 3 7 3 7 7
Cup, Mug, Glass, Bowl 7 3 3 7 7
Phone, Charger, Socket 7 7 7 3 7
Towel, Shirt, Newspaper 7 7 7 7 3
greater than the one for objects classes. For example,
objects that are visually very dissimilar such as books,
bottles, boxes and drawers, may belong to the same
state class (open). Figure 1 presents analogous exam-
ples. Moreover, the inter-class boundaries for the SD
problem may hinge on minute details. For example,
a slightly lifted cap is the only difference between an
open and a closed bottle. Another special aspect of
SD has to do with the fact that an object may possess,
simultaneously, several non mutually exclusive states
(e.g., an open, filled glass). Furthermore, considering
the problem of SD under a broader perspective which
also includes videos as input, we can attest the dy-
namic nature of object states. For example, a “filled”
cup may become “empty” in seconds in contrast to its
object category which remains fixed.
Motivated by the previous observations and argu-
ments which point towards the significance and the
special characteristics of SD, as well as the limited
study upon the subject, we investigate the SD prob-
lem in more detail. First, we provide a new dataset,
the Object States Detection Dataset (OSDD), consist-
ing of everyday household objects appearing in a va-
riety of different states. Given the small number of re-
lated datasets, we believe that OSDD could be useful
to anyone interested in the problem of SD. Second, we
conduct a number of carefully devised experiments in
order to examine the performance of OD and SD on
OSDD. The experimental evaluation exposes the per-
formance of solutions to the OD and SD problems,
confirming that SD is harder than OD and attesting
the need for robust and performant solutions to the
SD problem.
2 RELATED WORK
We review existing approaches to the OD and SD
problems. For OD the literature is vast and its de-
tailed review is beyond the scope of this paper. There-
Detecting Object States vs Detecting Objects: A New Dataset and a Quantitative Experimental Study
591
Table 2: Number of annotations for the different object-state combinations.
Open Closed Empty CL CS Plugged Unplugged Folded Unfolded Total
basket 122 336 458
book 316 679 995
bottle 891 923 420 803 238 3275
bowl 809 146 790 1745
box 518 291 184 337 1330
charger 235 376 611
cup 432 139 220 791
door 271 481 752
drawer 468 484 952
glass 523 363 215 1101
jar 356 295 176 111 369 1307
mug 541 160 269 970
newspaper 322 135 457
phone 205 743 948
shirt 139 187 326
socket 486 1016 1502
towel 320 197 517
tub 276 153 136 416 981
Total 3096 3306 3343 1722 3190 926 2135 781 519 19018
Table 3: OSDD and existing object states datasets, in numbers.
Dataset Images/Videos Annotations States Objects Task View
OSDD (ours, proposed) 13,744 images 19,018 9 18 SD 3rd person
(Isola et al., 2015) 63,440 images 63,440 18 NA SC Egocentric
(Liu et al., 2017) 809 videos 330,000 21 25 SD & AR Egocentric
(Fire and Zhu, 2017) 490 Videos 180,374 17 13 SD & AR 3rd person
(Alayrac et al., 2017) 630 Videos 19,949 7 5 SD & AR 3rd person
fore, we restrict ourselves to an overview of the main
classes of approaches that follow the more recent,
state-of-art deep-learning paradigm. We also provide
pointers to existing object states datasets and we iden-
tify the contributions of this work.
Object Detection: Deep learning-based object detec-
tion frameworks can be categorized into two groups:
(i) one-stage detectors, such as YOLO (Redmon
and Farhadi, 2017) and SSD (Liu et al., 2016)
and (ii) two-stage detectors, such as Region-based
CNN (R-CNN) (Girshick, 2015) and Pyramid Net-
works (Lin et al., 2017a). Two-stage detectors use a
proposal generator to create a sparse set of propos-
als in order to extract features from each proposal
which are followed by region classifiers that make
predictions about the category of the proposed region,
whereas one-stage detectors generate categorical pre-
dictions of objects on each location of the feature
maps omitting the cascaded region classification pro-
cedure. Two-stage detectors are typically more per-
formant and achieve state-of-the-art results on the ma-
jority of the public benchmarks, while one-stage de-
tectors are characterized by computational efficiency
and are used more widely for real-time OD. Some
other highly influential works in the field are (He
et al., 2016), (Huang et al., 2017), (He et al., 2017)
and (Lin et al., 2017b).
State Detection: The research that has been con-
ducted in SD has treated the problem using either
videos or images as input. In the first case, the
problem of SD usually serves as a stepping stone to
achieve action recognition.
In (Alayrac et al., 2017), SD is studied in the con-
text of videos containing manipulation actions per-
formed upon 7 classes of objects. The authors for-
mulate SD as a discriminative clustering problem and
attempt to address it by optimization methods. (Liu
et al., 2017) represent state-altering actions as con-
current and sequential object fluents (states) and uti-
lize a beam search algorithm for fluent detection and
action recognition. In a similar vein, (Aboubakr et al.,
2019) explores state detection in tandem with action
recognition. The method is based on the learning of
appearance models of objects and their states from
video frames which are used in conjunction with a
state transition matrix which maps action labels into
a pre-state and a post-state. In (Isola et al., 2015), the
states and transformations of objects/scenes on im-
age collections are studied, and the learned state rep-
resentations are extended to different object classes.
(Fire and Zhu, 2015; Fire and Zhu, 2017) examines
the causal relations between human actions and ob-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
592
Table 4: The experimental details of the different scenarios.
Columns show the scenario name, number of involved ob-
jects, number of involved states (ME: mutually exclusive),
number of trained networks, number of performed experi-
ments, target problem.
Scenario
Obj.
States
Nets
Exp.
Tasks
OOOS 1 2 ME 28 28 SD
MOOS 3-6 2 ME 5 5 SD
OOMS 1 3-5 8 8 SD
MOMS 18 9 1 1 SD
ODS 18 9 1 1 OD
TOOS 2 2 ME 28 7 SD, OD
SDG 3-9 2 ME 0 5 SD
ject fluent changes. (Fathi and Rehg, 2013) developed
a weakly supervised method to recognize actions and
states of manipulated objects before and after the ac-
tion proposing a weakly supervised method for learn-
ing the object and material states that are necessary
for recognizing daily actions. (Wang et al., 2016)
designed a Siamese network to model precondition
states, effect states and their associate actions. (Berta-
sius and Torresani, 2020) leveraged the semantic and
compositional structure of language by training a vi-
sual detector to predict a contextualized word em-
bedding of the object and its associated narration en-
abling object representation learning where concepts
relate to a semantic language metric.
Overall, previous works dealt with the SD prob-
lem mostly by employing egocentric videos. These
are less challenging than 3rd person-view input due
to the higher resolution in which objects are imaged
and the lack of considerable clutter/occlusions. Addi-
tionally, in the majority of the cases, SD is considered
a means for achieving AR and not as a goal on its
own right, thus the studies of the SD problem are of a
limited scope.
Object States Datasets: Currently, there are only
a few object states datasets available to the research
community. The MIT-States dataset (Isola et al.,
2015) is composed of 63,440 images involving 115
attribute classes and 245 object categories and is suit-
able for state classification (SC). However, the dataset
contains segmented images of objects in white back-
ground so they are far from being natural. Addition-
ally, most of the 115 reported attributes constitute ob-
ject properties that are not necessarily object states.
(Liu et al., 2017) presents a dataset consisting of 809
videos covering 21 state classes and 25 object cate-
gories. The scope of the dataset is SD and action
recognition (AR). The dataset presented in (Alayrac
et al., 2017) contains 630 videos concerning 7 state
classes and 5 object categories, also suited for SD and
AR. Finally, (Fire and Zhu, 2017) proposes a RGBD
Table 5: Aggregate results for scenarios OOOS, MOOS,
OOMS and MOMS. Row 1: weighted AP, row 2: percent-
age of experiments in which this scenario achieved best AP,
row 3: percentage of experiments in which this scenario
achieved worst AP, row 4: Average mAP , row 5: Aver-
age AP@50:5:95. Blue/red font indicates best/worst per-
formance in a line.
Metric OOOS MOOS OOMS MOMS
Weighted AP 68.4 63.2 54.3 46.6
Best perf. (%) 58.0 38.0 2.0 2.0
Worst perf. (%) 6.0 6.0 14.0 74.0
Avg mAP 62.3 56.5.0 46.8 38.4
Avg AP@50:5:95 40.5 39.7 29.1 23.7
video dataset for causal reasoning spanning 13 object
and 17 state categories.
In general, the existing SD datasets lack the diver-
sity that characterizes the OD datasets, which can be
attributed to the fact that they have been created with-
out having the task of SD as a primary goal.
Our Contribution: We introduce OSDD, a new
states dataset of 13,744 images and 19,018 states an-
notations. The dataset involves 18 object categories
that may appear in 9 different state classes. The
images of the dataset are characterised by a great
variety regarding viewing angles, background and
foreground scene settings, object sizes and object-
state combinations. These characteristics render the
dataset more challenging than most of the existing
datasets which contain a much more limited diversity
with respect to the aforementioned characteristics.
Moreover, OSDD could be proven useful for those
who want to assess the performance of approaches
addressing the tasks of zero-shot and few-shot recog-
nition.
In addition, we provide an extensive quantitative,
experimental evaluation of several aspects of the SD
problem. We conduct 55 different experiments in-
cluding 71 differently trained networks in the context
of 7 scenarios of varied settings which allows us to
draw valuable insights about the nature of SD and its
relation to OD. OSDD and the associated experiments
set useful baselines for assessing progress on the topic
of SD. To the best of our knowledge, our work is the
first in which such a thorough investigation of the SD
task is performed.
3 THE OBJECT STATES
DETECTION DATASET (OSDD)
The proposed Objects States Detection Dataset
(OSDD)
2
consists of images depicting everyday
2
https://socola.ics.forth.gr/tools/
Detecting Object States vs Detecting Objects: A New Dataset and a Quantitative Experimental Study
593

Table 6: Experimental results for the AP metric averaged
at the level of states for the OOOS, MOOS, OOMS and
MOMS scenarios. Each row corresponds to a different
state. Blue/red font indicates best/worst performance for
the given state.
State OOOS MOOS OOMS MOMS
Open 68.7 67.4 52.4 49.9
Closed 69.2 62.2 62.4 48.2
Empty(vs CL) 70.0 67.6 58.3 56.4
Filled 49.9 40.4 38.4 25.0
Empty(vs CS) 73.0 69.8 58.3 56.4
Occupied 64.8 56.0 53.6 37.2
Folded 57.3 62.0 NA 39.5
Unfolded 37.0 39.9 NA 22.7
Connected 60.3 49.2 NA 24.8
Unconnected 84.9 78.5 NA 66.1
household objects in a number of different states.
The ground-truth annotations involve the labels and
bounding boxes spanning 18 object categories and 9
state classes. The object categories are: bottle, jar,
tub, book, drawer, door, cup, mug, glass, bowl, basket,
box, phone, charger, socket, towel, shirt and newspa-
per. The 9 state classes are: open, close, empty, con-
taining something liquid (CL), containing something
solid (CS), plugged, unplugged, folded and unfolded.
The states are grouped in 5 pairs of mutually ex-
clusive states. Table 1 shows which cluster of objects
is relevant to which pair of mutually exclusive (ME)
states. Table 2 provides an overview of the dataset
contents. For all object categories (rows) and states
(columns), we report the number of annotations.
The images were obtained by selecting
video frames from the something-something V2
Dataset (Mahdisoltani et al., 2018). Specifically,
images containing visually salient objects and states
of the aforementioned categories were captured and
annotated with bounding-boxes and ground truth
labels referring to the corresponding object categories
and state classes. Overall, the dataset contains 13,744
images and 19,018 annotations obtained by selecting
the first, last and middle frames of 9,015 videos,
after checking that each of them contains salient
information. There are more annotations than images
because (a) in a certain image there may be more than
one objects or/and (b) a certain object is annotated
for all the non-exclusive states it appears in.
The dataset annotation was performed based on
the Computer Vision Annotation Tool (CVAT)
3
. In or-
der to handle properly ambiguous situations and safe-
guard from erroneous annotations, each image was
examined at least five times. Overall, the annotation
process required approximately 350 person hours.
3
https://github.com/openvinotoolkit/cvat
Table 7: Experimental Results for the AP metric averaged
at the level of states for the OOOS, MOOS, OOMS and
MOMS scenarios. Each row corresponds to a different ob-
ject. Blue/red font indicates best/worst performance for the
given object.
Object OOOS MOOS OOMS MOMS
bottle 61.9 50.0 40.2 32.4
tub 74.8 48.1 47.0 18.9
cup 70.8 73.2 66.5 64.7
mug 78.0 80.3 82.6 71.4
jar 50.8 59.3 36.0 30.6
glass 64.2 62.6 55.9 50.0
bowl 75.5 77.3 71.5 68.0
box 73.4 71.2 59.6 62.9
basket 58.6 65.6 NA 55.2
book 74.7 63.9 NA 62.0
door 45.9 45.4 NA 30.7
shirt 40.4 33.3 NA 22.8
newspaper 40.5 45.8 NA 14.5
towel 54.7 62.4 NA 44.1
drawer 73.8 66.5 NA 58.5
phone 79.2 79.2 NA 70.0
charger 69.5 38.7 NA 35.2
socket 80.3 75.8 NA 51.9
3.1 OSDD vs Existing Object States
Datasets
Table 3 summarizes information regarding the exist-
ing SD datasets. The dataset that is most similar to
OSDD is the one presented in (Isola et al., 2015).
However, the two datasets differ in a number of ways.
First, the images in our dataset are snapshots of video
tracklets that show objects manipulations, whereas
the images in (Isola et al., 2015) stem from scrap-
ping. Moreover, the majority of images in (Isola et al.,
2015) are cropped containing a single object, whereas
OSDD images contain objects in context (e.g., other
objects, background, etc).
Another important remark regarding the existing
datasets, is that in the case of (Liu et al., 2017), (Fire
and Zhu, 2017) and (Alayrac et al., 2017), annotations
were provided for adjacent video frames, whereas in
our case they involve the first, middle and last frames
of 9,015 videos. Thus, although they appear to pro-
vide many more annotations, they are much less di-
verse than OSDD due to the similarity between many
of the annotated frames.
In summary, the aspects that distinguish OSDD
from the existing datasets are its greater diversity
regarding objects and states appearance, the greater
background/foreground variation and the greater di-
versity of viewpoints which results in a vast variety
of object sizes and viewing angles. These character-
istics make it unique for studying SD in challenging,
realistic scenarios.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
594
Table 8: Experimental results for the OOOS, MOOS, OOMS and MOMS scenarios. First number in each cell corresponds
to the mAP metric and second number corresponds to the AP@50:5:95 metric respectively. The metrics are calculated at the
level of each object pairs for the OOOS and MOOS scenarios, at the level of each object for the OOMS scenario and at the
level of all objects for the MOMS scenario respectively. Blue/red font indicates best/worst performance between the OOOS
and MOOS scenarios.
Object Pair OOOS MOOS OOMS MOMS
bottle
P1 71.5 / 48.0 67.7 / 46.8
40.4 / 25.3
38.4 / 23.7
P2 38.0 / 26.3 24.4 / 15.1
P3 68.6 / 43.8 43.8 / 30.1
jar
P1 50.0 / 25.8 67.2 / 49.8
33.9 / 22.3P2 35.8 / 25.0 52.2 / 33.7
P3 51.8 / 33.4 52.6 / 38.9
tub
P1 83.0 / 59.1 57.5 / 42.4
41.9 / 23.2P2 44.5 / 25.3 66.6 / 37.5
P3 64.2 / 39.7 29.4 / 20.6
box
P1 73.0 / 53.4 61.1 / 46.2
56.7 / 20.7
P3 67.2 / 43.8 60.4 / 45.0
glass
P2 60.1 / 41.5 52.4 / 34.9
46.8 / 32.9
P3 57.9 / 41.0 63.7 / 47.7
cup
P2 59.9 / 41.6 54.5 / 36.6
53.5 / 36.5
P3 62.2 / 47.8 75.0 / 60.0
mug
P2 56.1 / 36.6 56.4 / 36.9
64.8 / 50.1
P3 64.6 / 45.8 73.7 / 56.3
bowl
P2 57.0 / 40.6 78.7 / 64.5
54.9 / 35.5P3 74.9 / 52.4 59.8 / 41.8
basket P3 55.6 / 29.1 53.6 / 41.6 NA
phone P4 61.7 / 40.6 64.2 / 40.6 NA
charger P4 68.6 / 42.2 38.1 / 21.4 NA
socket P4 76.2 / 39.3 71.0 / 36.1 NA
book P1 64.2 / 44.3 57.0 / 42.7 NA
door P1 42.1 / 23.9 39.1 / 23.8 NA
drawer P1 75.6 / 43.9 68.9 / 45.8 NA
newspaper P5 35.7 / 23.5 43.7 / 29.8 NA
towel P5 53.9 / 35.5 61.5 / 41.6 NA
shirt P5 41.8 / 22.5 36.5 / 25.6 NA
Weighted Average 62.3 / 40.5 56.5 / 39.7 46.8 / 29.1 38.4 / 23.7
Table 9: Experimental results for the MOMS and ODS sce-
narios. See text for details.
Metric MOMS ODS
AP@50:5:95 23.7 30.9
mAP 38.4 48.8
4 EXPERIMENTAL EVALUATION
OD has been studied extensively and it is one of the
most prominent cases where the standard deep learn-
ing approach, i.e. the training of special architectures
of Deep Neural Networks with appropriately anno-
tated datasets, has been proven exceptionally advanta-
geous in comparison to traditional techniques involv-
ing hand-crafted image features. We choose to follow
the same approach for solving SD, since it allows to
assess our intuition regarding the nature of OD and
SD, both directly and indirectly. Specifically, we can
observe how the performance of SD variants changes
as the complexity of the problem at hand varies, and
check whether this behavior is congruent to the one
that is expected for OD variants when undergo a sim-
ilar complexity shift. Equally importantly, by test-
ing SD under the same experimental conditions (i.e.,
identical training samples and network architectures)
that were used for an OD problem, we can compare
directly the performances obtained for the two tasks.
Training Configuration: The network we
are using in our experimental evaluation is
Yolov4 (Bochkovskiy et al., 2020), one of the
most popular CNNs for OD. We opted for using this
network because it it can be easily fine-tuned, it has
been utilized with much success in a wide variety
of settings and exhibits SoA performance in OD.
Consequently, we follow the typical procedure for
the deployment of a network tailored for OD, i.e.,
we split the set of the annotated image samples into
training, validation and testing parts.
In order to accelerate the training phase and boost
the performance, we follow the common practice of
Detecting Object States vs Detecting Objects: A New Dataset and a Quantitative Experimental Study
595
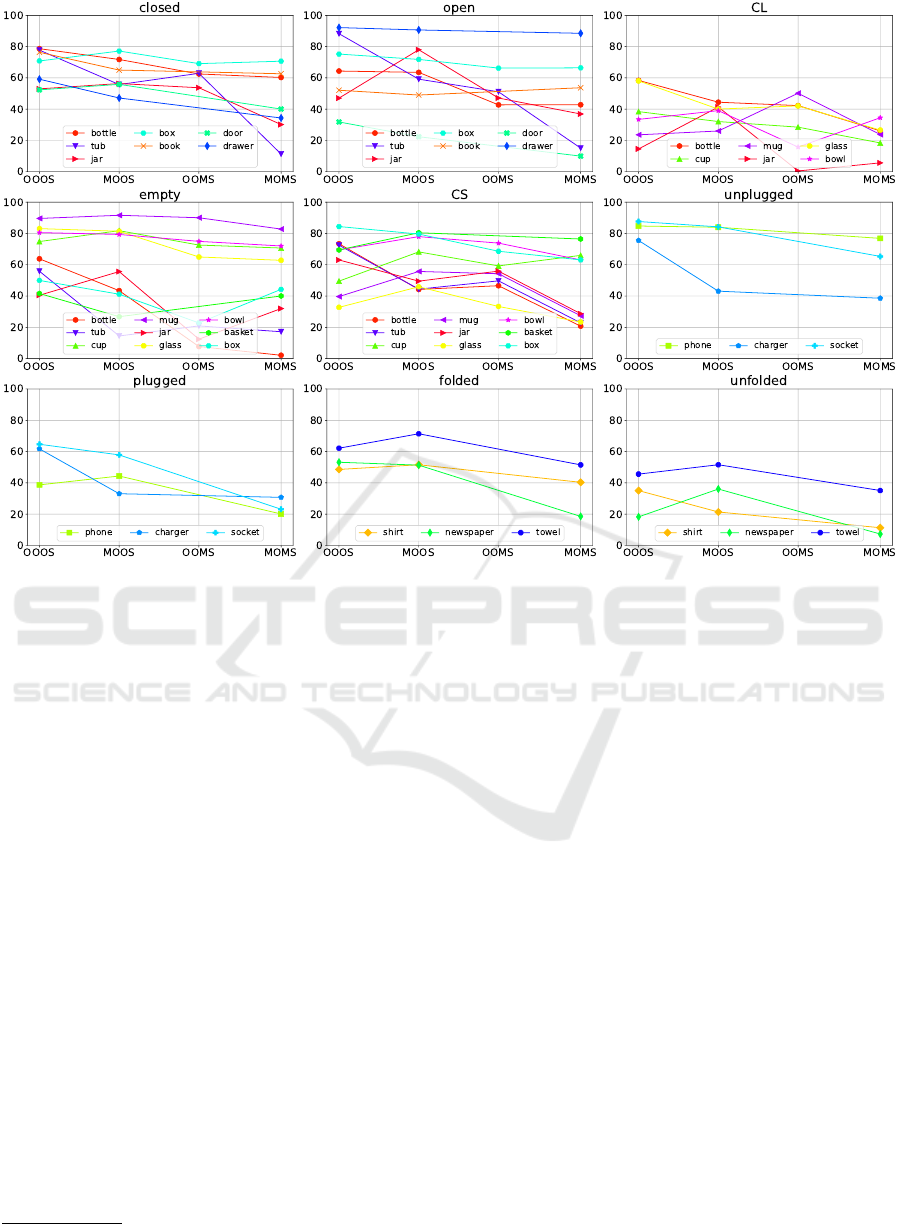
Figure 3: AP for the OOOS, MOOS, OOMS and MOMS scenarios, for each object state in OSDD.
using pre-trained weights at the start of the training
phase of every network. Specifically, the weights
used are obtained after training with MS-COCO
dataset (Lin et al., 2014).
We also employ data augmentation by horizon-
tally flipping all frames in a batch with a probability
of 0.5. The number of training epochs is set equal to
the product of 2,000 to the number of the categories
of the corresponding sub-task
4
. We used the Adam
optimizer with an initial learning rate of 0.001 and an
early stopping policy of 50 epochs.
Evaluation Metrics: Given an image as an input,
the solution of the SD problem produces the bound-
ing box of each detected object and the set of state
classes, in which that object belongs. For a detec-
tion to be considered correct, the set of states must
be identical to the ground truth and the overlap be-
tween the ground truth and the detected bounding
boxes must be greater than a certain threshold, which,
following common practices, we set to 50%. More-
over, predictions having confidence lower than 50%
are rejected. Our analyses are based on three standard
performance metrics used for assessing OD tasks:
AP, AP@50:5:95 and mAP. AP is calculated for each
object-state combination in each experiment instance,
whereas AP@50:5:95 and mAP are calculated per ex-
4
https://github.com/AlexeyAB/darknet
periment instance as in (Padilla et al., 2020).
Experimental Scenarios: For the purposes of the
evaluation, we devise 7 different scenarios, each one
involving different assumptions regarding the object
categories and states which are to be detected. The
details of the scenarios are presented in Table 4. In
the rest of this section, we describe each scenario, we
explain the rationale behind it along with the hypothe-
ses that we want to test, and present the experimental
results we obtained and the conclusions that we draw.
4.1 The OOOS, MOOS, OOMS and
MOMS Scenarios
Aiming to explore how the approach fares as the com-
plexity of the problem scales, we devise 4 different
SD experimental scenarios. The adjustable settings
for the scenarios concern the number of different ob-
ject categories involved and the number of possible
states for each object category. Specifically, the tested
SD scenarios are defined as follows:
• OOOS (One Object One State Pair): Involves
the detection of an object’s state, assuming the
object class is known, i.e. the corresponding net-
work has been trained exclusively on objects be-
longing to this class, and the possible states for the
object are two and mutually exclusive (M.E.).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
596
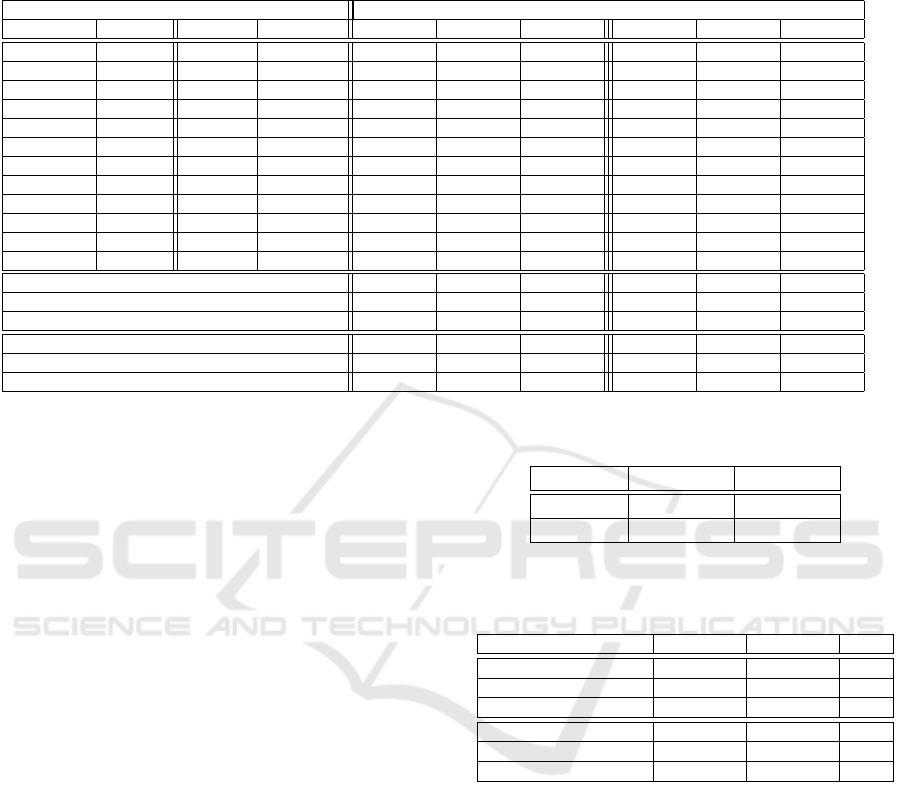
Table 10: Experimental results for the TOOS Scenario. Each row corresponds to a different objects/states combinations. First
number in each cell corresponds to the mAP metric and second number corresponds to the AP@50:5:95 metric respectively.
Blue/red font indicates best/worst performance achieved for the given objects/states combination.
Scenario Details Results
Object 1 Object 2 State 1 State 1 CS1 CS 2 ST CO1 CO2 OB
bottle jar open closed 19.5 /13.3 9.0 /5.4 27.2 /17.6 26.7 /18.1 69.7 /45.5 67.3 /45.5
bottle jar empty CL 7.7 /5.0 1.5 /0.7 35.2 /20.7 52.1 /28.0 38.2 /20.9 58.8 /33.4
cup glass empty CL 2.4 /1.6 2.6 /1.8 55.0 /39.4 59.2 /43.2 49.8 /26.9 79.8 /44.6
cup glass empty CS 4.4 /3.0 10.6 /7.4 59.7 /43.3 37.3 /24.1 56.1 /28.1 75.4 /54.6
charger phone plugged unplugged 5.7 /3.3 4.7 /3.0 49.4 /28.3 49.9 /30.8 67.0 /33.8 81.7 /45.9
shirt towel unfolded folded 19.7 /14.4 13.0 /7.2 32.5 /19.2 45.4 /28.3 51.4 /27.3 60.3 /37.4
newspaper towel unfolded folded 0.3 /0.2 3.6 /2.4 77.1 /58.6 72.4 /51.0 41.0 /21.6 84.4 /54.4
bowl mug empty CL 5.2 /3.5 18.6 /11.5 50.1 /32.3 34.1 /25.2 61.5 /37.9 83.9 /67.2
bowl mug empty CS 6.8 /4.8 21.5 /14.0 46.0 /35.0 14.3 /9.2 67.6 /39.6 77.7 /48.6
door drawer open closed 1.5 /1.0 1.5 /0.6 19.8 /10.5 16.7 /7.6 61.3 /39.5 67.3 /39.9
glass mug empty CL 1.1 /0.7 0.8 /0.6 74.8 /52.6 72.1 /56.1 54.1 /38.4 85.3 /56.5
glass mug empty CS 3.3 /2.4 2.9 /2.2 55.4 /42.1 43.7 /31.6 61.8 /43.7 78.4 /53.8
Weighted Average mAP 8.5 6.4 53.3 49.0 48.0 72.5
Best perf (%) 0.0 0.0 0.0 0.0 14.3 85.7
Worst perf. (%) 42.9 57.1 0.0 0.0 0.0 0.0
Weighted Average AP@50:5:95 5.8 4.0 29.2 32.5 31.9 45.1
Best perf. (%) 0.0 0.0 14.3 0.0 14.3 71.4
Worst perf. (%) 42.9 57.1 0.0 0.0 0.0 0.0
• MOOS (Many Objects One State Pair): in-
volves the detection of an object’s state when its
class is not known, i.e. the number of object
classes upon which the corresponding network
has been trained is more than one, and the pos-
sible states for the objects are two and M.E.
• OOMS (One Object Many States): involves the
detection of an object’s state(s) assuming the ob-
ject class is known and the possible states for the
object are more than two and not necessarily M.E.
• MOMS (Many Objects Many States): Detec-
tion of an object’s state when its class is not
known beforehand and the possible states for each
class of object could be more than two and not
necessarily M.E.
The obtained results are summarized in Tables 5-8
and Figure 3. It can be verified that the best perfor-
mance is obtained in the OOOS scenario, while the
worst in the MOMS scenario. This is expected, as
from a single object and state pair (OOOS) we move
into the far more complex scenario of multiple objects
and multiple state pairs (MOMS). However, we also
observe that performances in MOOS are considerably
better that performances in OOMS. Thus, when de-
parting from the baseline OOOS scenario and increas-
ing the complexity of the problem either in the direc-
tion of adding more objects (MOOS) or in the direc-
tion of adding more states (OOMS), we observe that
the addition of more states makes the problem consid-
erably harder.
Table 11: Object/state combinations in the TOOS scenario.
See text for details.
State 1 State 2
Object 1 (A) O
1
, S
1
(B) O
1
, S
2
Object 2 (C) O
2
, S
1
(D) O
2
, S
2
Table 12: Dataset splits in each setting of the TOOS sce-
nario. A, B, C and D are defined in Table 11. See text for
details.
Setting Training Testing Task
Cross States 1 (CS1) A, D B, C SD
Cross States 2 (CS2) B, C A, D SD
States (ST) A, B, C, D A, B, C, D SD
Cross Objects 1 (CO1) A, D B, C OD
Cross Objects 2 (CO2) B, C A, D OD
Objects (OB) A, B, C, D A, B, C, D OD
4.2 Object Detection Scenario (ODS) vs
MOMS
The Object Detection Scenario (ODS) deals with the
detection of object categories, using the same settings
used for the MOMS scenario. Essentially, it is about
the same data, processed with the same network ar-
chitectures, with the exception that in ODS we seek
for the object categories, while in MOMS we seek for
the object states.
The performances of the detectors for the two sce-
narios are presented in Table 9. We observe that the
performance in OD is better than that achieved in SD.
The better ODS performance is obtained despite the
fact that ODS has to deal with double the number
of categories (18) compared to MOMS (9). Further-
Detecting Object States vs Detecting Objects: A New Dataset and a Quantitative Experimental Study
597

more, the existence of visually similar pairs of ob-
jects (bottle-jar, cup-glass, towel-shirt) increase the
difficulty of the OD task. Overall, the comparison
between the performances of the two scenarios sup-
ports strongly the notion that SD is a harder problem
to solve than OD.
4.3 The Two Objects One State Pair
(TOOS) Scenario
In the context of the Two Objects One State Pair
(TOOS) scenario, we train and test for images in
which there are two different types of objects appear-
ing in either one of two mutually exclusively states.
Specifically, let O
1
and O
2
be the two objects and S
1
and S
2
the two states. The situation is illustrated in
Table 12. We define six different cases, depending on
which subset of data is used for training, which for
testing and what task is solved. All these splits have
been employed in 12 different object/states combina-
tions. The rationale behind these experiments is to
compare directly the learning capacity of the detectors
for object classes and object categories, when trained
and tested on exactly the same base of data.
Table 10 summarizes the obtained results. The
performance in CS1 and CS2 (aiming for states) is
significantly inferior to the one observed in cases CO1
and CO2 (aiming for objects). The poor performance
in this case can be explained by the fact that the
detectors learn principally the visual features of the
object category and not the ones of the state class.
In other words, the category of an object is visually
much more salient than its state. Additionally, the
performance in ST is lower than the performance on
OB. This evidence supports the hypothesis that SD is
harder than OD.
4.4 State Detection Generalization
(SDG) Scenario
In the State Detection Generalization Scenario
(SDG), we examine the generalization capacity of the
state detectors. Specifically, in the context of this sce-
nario, state detectors which have been trained for in-
stances of one particular object category and a pair of
two mutually exclusive states are tested on instances
of other categories of objects that appear on either one
of the same two mutually exclusively states. As an
example, we check whether an SD method trained on
bottles to detect whether they are filled or empty, is
used to check whether a glass is filled or empty. In
this case, we expect that the detectors will be able to
generalize better for objects that are visually similar
to the object class for the states of which they have
been trained.
The results for this scenario for the state pairs P1-
P5 are shown in Tables 13-16. The obtained results
corroborate the intuition that the performance of a
state detector increases along with the visual similar-
ity between the objects classes of the trained and the
tested samples. In more detail, the performances are
high for specific cases of great visual similarity and
mediocre or poor for the rest of the cases. The fact
that the state detectors can only generalize for certain
cases makes probable that the state detectors will ex-
hibit poor performance when encountering new types
of objects.
5 SUMMARY AND FUTURE
WORK
In this paper, we have introduced a new dataset of ob-
ject states and conducted an extensive series of ex-
periments over it in order to compare the SD and OD
tasks. Overall, the experimental results indicate the
significant differences of the SD and OD tasks. SD is
more challenging than OD. Moreover, the results ob-
tained for more than a single pair of state classes can
be considered mediocre to poor. In this case, better
performance could be obtained if a number of OOOS
or MOOS detectors are employed simultaneously but
the scalability issues of this approach limit its practi-
cal use.
Regarding future work, there are a number of steps
worth exploring. First, a more fine-grained catego-
rization of the states would be more convenient es-
pecially for SDs used in the context of AR. More-
over, an experimental evaluation using a two-stage
SoA object detector, such as Faster-RCNN (Ren et al.,
2015), could provide additional insights with respect
to the similarities and differences between SD and
OD. The utilization of semantic embeddings, which
have been used with great success in challenging
problems such as Zero-Shot recognition, is another
avenue that seems promising. Another interesting av-
enue of research would be to examine how the group-
ing of objects according to common sense criteria
affects the performance of the state detectors. Ob-
viously, the main goal is to come up with a novel
method for SD which will cope with this important
and difficult problem in realistic conditions.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
598
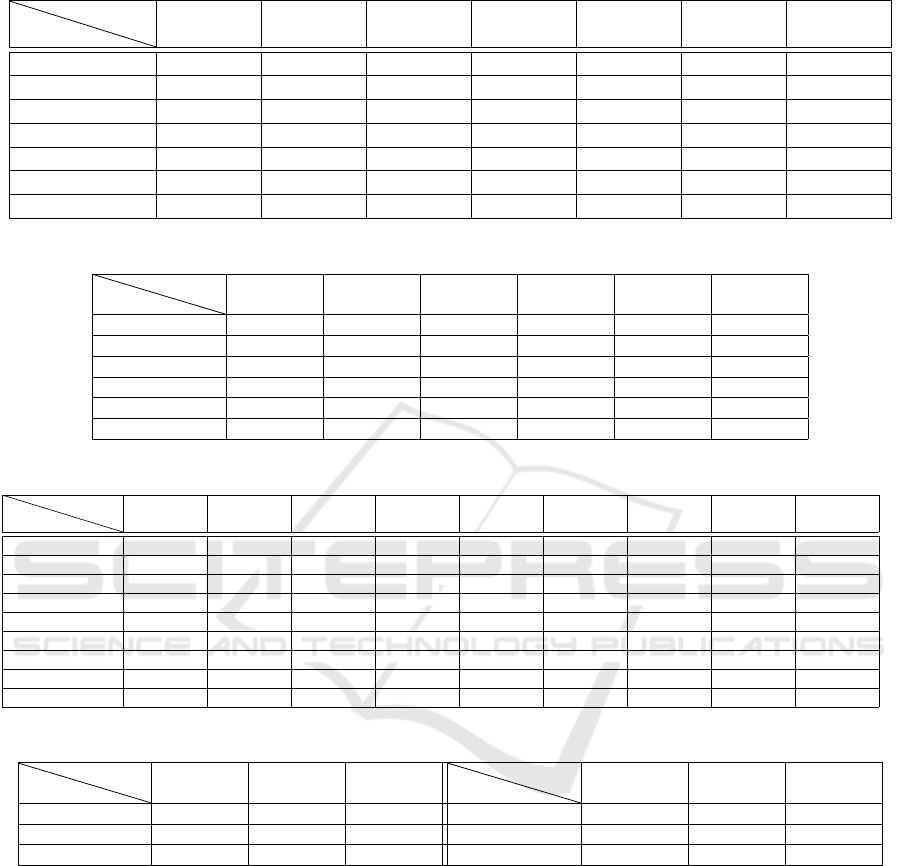
Table 13: Experimental results for the SDG scenario, for the mutually exclusive states pair P1. The first number in each cell
corresponds to the mAP metric and the second to the AP@50:5:95 metric respectively.
Trained
Tested
Book Bottle Box Door Drawer Jar Tub
book 64.2 /44.3 1.2 /0.6 22.3 /16.7 3.4 /2.0 1.1 /0.5 2.3 /1.4 9.9 /5.4
bottle 11.7 /6.9 71.5 /48.0 5.6 /3.8 0.0 /0.0 0.9 /0.8 46.3 /30.4 14.1 /9.3
box 35.1 /22.8 4.1 /2.7 73.0 /53.4 5.1 /1.7 28.9 /13.6 11.0 /6.7 59.5 /42.7
door 2.6 /1.6 0.1 /0.0 4.0 /1.6 42.1 /23.9 5.1 /1.5 0.0 /0.0 0.7 /0.5
drawer 17.4 /7.4 0.1 /0.0 9.8 /4.6 8.2 /5.0 75.6 /43.9 0.0 /0.0 0.0 /0.0
jar 1.7 /1.0 14.0 /7.1 1.9 /1.1 0.0 /0.0 0.4 /0.1 50.0 /25.8 21.2 /11.0
tub 4.8 /2.4 2.1 /1.3 15.9 /10.6 0.2 /0.1 4.6 /2.0 26.7 /19.0 83.0 /59.1
Table 14: Experimental results for the SDG scenario, for the mutually exclusive states pair P2.
Trained
Tested
bottle bowl cup glass jar mug
bottle 38.0 /26.3 1.6 /0.9 7.0 /4.2 5.7 /3.3 19.1 /11.3 2.0 /1.4
bowl 0.5 /0.4 57.0 /40.6 35.4 /25.5 13.1 /9.2 9.6 /6.9 29.9 /17.2
cup 1.1 /0.8 46.8 /33.1 59.9 /41.6 34.9 /25.5 25.3 /17.7 63.3 /47.5
glass 1.3 /0.8 20.6 /15.9 33.5 /25.3 60.1 /41.5 19.7 /14.9 14.4 /7.7
jar 10.7 /5.1 2.4 /1.2 4.0 /2.1 26.3 /13.6 35.8 /25.0 5.6 /2.6
mug 0.4 /0.2 46.3 /32.8 52.1 /35.7 31.3 /20.2 15.4 /10.0 56.1 /36.6
Table 15: Experimental results for the SDG scenario, for the mutually exclusive states pair P3.
Trained
Tested
basket bottle bowl box cup glass jar mug tub
basket 55.6 /29.1 17.4 /10.0 22.4 /15.7 29.9 /20.5 17.4 /12.6 10.2 /5.8 10.3 /7.4 16.2 /10.4 23.6 /13.2
bottle 5.5 /3.4 68.6 /43.8 15.3 /8.9 4.0 /2.6 32.9 /22.3 31.0 /20.1 41.4 /27.6 11.9 /6.4 17.9 /10.1
bowl 46.1 /34.8 8.7 /4.8 74.9 /52.4 5.7 /2.3 49.7 /37.7 16.6 /10.4 13.9 /8.9 32.1 /17.9 30.1 /20.1
box 42.2 /21.3 17.5 /9.1 42.8 /18.9 67.2 /43.8 47.2 /22.0 18.9 /9.5 20.5 /10.4 17.2 /9.0 39.4 /18.5
cup 37.1 /23.5 7.4 /5.1 47.7 /31.2 8.2 /4.2 62.2 /47.8 43.0 /29.1 21.4 /15.1 65.0 /41.5 19.8 /13.1
glass 17.4 /10.4 10.4 /4.6 25.7 /15.2 3.1 /1.5 41.4 /25.0 57.9 /41.0 17.9 /10.1 24.5 /12.7 11.9 /7.1
jar 9.2 /5.5 24.0 /16.4 21.1 /15.3 15.0 /9.4 22.5 /14.7 22.0 /14.8 51.8 /33.4 14.1 /9.7 20.5 /11.7
mug 16.2 /11.3 11.6 /7.3 55.1 /37.9 0.7 /0.6 61.0 /42.9 28.9 /19.3 12.3 /8.2 64.6 /45.8 15.6 /10.1
tub 31.8 /18.5 27.2 /15.8 64.9 /38.2 19.5 /10.1 44.6 /30.8 21.8 /12.6 31.1 /18.4 27.2 /14.5 64.2 /39.7
Table 16: Experimental results for the SDG scenario, for the mutually exclusive states pair P4 (left table) and P5 (right table).
Trained
Tested
charger phone socket
Trained
Tested
newspaper shirt towel
charger 68.6 /42.2 12.6 /7.8 3.1 /0.7 newspaper 35.7 /23.5 6.9 /4.3 12.2 /8.0
phone 22.4 /9.5 61.7 /40.6 0.0 /0.0 shirt 11.0 /5.1 41.8 /22.5 25.5 /18.5
socket 4.0 /0.9 0.0 /0.0 76.2 /39.3 towel 19.7 /12.7 34.0 /23.5 53.9 /35.5
ACKNOWLEDGEMENTS
This project has received funding from the Hellenic
Foundation for Research and Innovation (HFRI) and
the General Secretariat for Research and Technology
(GSRT), under grant agreement No 188.
REFERENCES
Aboubakr, N., Crowley, J. L., and Ronfard, R.
(2019). Recognizing Manipulation Actions from
State-Transformations.
Alayrac, J.-B., Sivic, J., Laptev, I., and Lacoste-Julien, S.
(2017). Joint Discovery of Object States and Manipu-
lation Actions. In International Conference on Com-
puter Vision (ICCV).
Bertasius, G. and Torresani, L. (2020). COBE: Contextual-
ized Object Embeddings from Narrated Instructional
Video. pages 1–14.
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion. arXiv preprint arXiv:2004.10934.
Fathi, A. and Rehg, J. M. (2013). Modeling actions through
state changes. Proceedings of the IEEE Computer
Detecting Object States vs Detecting Objects: A New Dataset and a Quantitative Experimental Study
599

Society Conference on Computer Vision and Pattern
Recognition, pages 2579–2586.
Fire, A. and Zhu, S. C. (2015). Learning perceptual causal-
ity from video. ACM Transactions on Intelligent Sys-
tems and Technology, 7(2).
Fire, A. and Zhu, S.-C. (2017). Inferring hidden statuses
and actions in video by causal reasoning. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition Workshops, pages 48–56.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely connected convolutional net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4700–
4708.
Isola, P., Lim, J. J., and Adelson, E. H. (2015). Discovering
states and transformations in image collections. Pro-
ceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 07-12-
June:1383–1391.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017a). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017b). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Liu, Y., Wei, P., and Zhu, S. C. (2017). Jointly Recogniz-
ing Object Fluents and Tasks in Egocentric Videos.
Proceedings of the IEEE International Conference on
Computer Vision, 2017-Octob:2943–2951.
Mahdisoltani, F., Berger, G., Gharbieh, W., Fleet, D.,
and Memisevic, R. (2018). On the effectiveness of
task granularity for transfer learning. arXiv preprint
arXiv:1804.09235.
Padilla, R., Netto, S. L., and da Silva, E. A. (2020). A sur-
vey on performance metrics for object-detection algo-
rithms. In 2020 International Conference on Systems,
Signals and Image Processing (IWSSIP), pages 237–
242. IEEE.
Redmon, J. and Farhadi, A. (2017). Yolo9000: better, faster,
stronger. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7263–
7271.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28:91–99.
Wang, X., Farhadi, A., and Gupta, A. (2016). Actions˜
transformations. In Proceedings of the IEEE con-
ference on Computer Vision and Pattern Recognition,
pages 2658–2667.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
600
