
Skeleton-based Online Sign Language Recognition
using Monotonic Attention
Natsuki Takayama
1 a
, Gibran Benitez-Garcia
1 b
and Hiroki Takahashi
1,2
1
Graduate School of Informatics and Engineering, the University of Electro-Communications, Japan
2
Artificial Intelligence Exploration Research Center, the University of Electro-Communications, Japan
Keywords:
Monotonic Attention, Neural Networks, Skeleton-ased Sign Language Recognition.
Abstract:
Sequence-to-sequence models have been successfully applied to improve continuous sign language word
recognition in recent years. Although various methods for continuous sign language word recognition have
been proposed, these methods assume offline recognition and lack further investigation in online and streaming
situations. In this study, skeleton-based continuous sign language word recognition for online situations was
investigated. A combination of spatial-temporal graph convolutional networks and recurrent neural networks
with soft attention was employed as the base model. Further, three types of monotonic attention techniques
were applied to extend the base model for online recognition. The monotonic attention included hard mono-
tonic attention, monotonic chunkwise attention, and monotonic infinite lookback attention. The performance
of the proposed models was evaluated in offline and online recognition settings. A conventional Japanese sign
language video dataset, including 275 types of isolated word videos and 113 types of sentence videos, was
utilized to evaluate the proposed models. The results showed that the effectiveness of monotonic attention to
online continuous sign language word recognition.
1 INTRODUCTION
Sign language is a natural language commonly rep-
resented by several visual cues, such as hand mo-
tions and shapes, and non-manual signals that in-
clude posture, facial expression, gaze, and mouthing.
From these characteristics, vision-based sign lan-
guage recognition, which can estimate words from
sign language videos, is an important subject of re-
search to conduct machine translation of sign lan-
guage to text. In recent years, continuous sign lan-
guage word recognition (Koller et al., 2017; Huang
et al., 2018; Pu et al., 2019; Cui et al., 2019; Zhou
et al., 2020; Papastratis et al., 2020; Koller et al.,
2020; Takayama et al., 2021b) and sign language
translation (Camgoz et al., 2018; Camgoz et al., 2020;
Guo et al., 2020; Zhou et al., 2021) based on deep
neural networks (DNNs) have been proposed. In
particular, sequence-to-sequence (Seq2Seq) models,
which can directly learn projections between the input
videos and sentences, have garnered attention owing
to their high recognition performance.
a
https://orcid.org/0000-0002-4455-5820
b
https://orcid.org/0000-0003-4945-8314
Although various methods have been proposed,
there is room for the improvement of sign language
recognition in practical situations. For example,
recognition systems should equip sign language de-
tection (Moryossef et al., 2020) to handle streaming
videos in an online situation. Moreover, several appli-
cations require online recognition, such as real-time
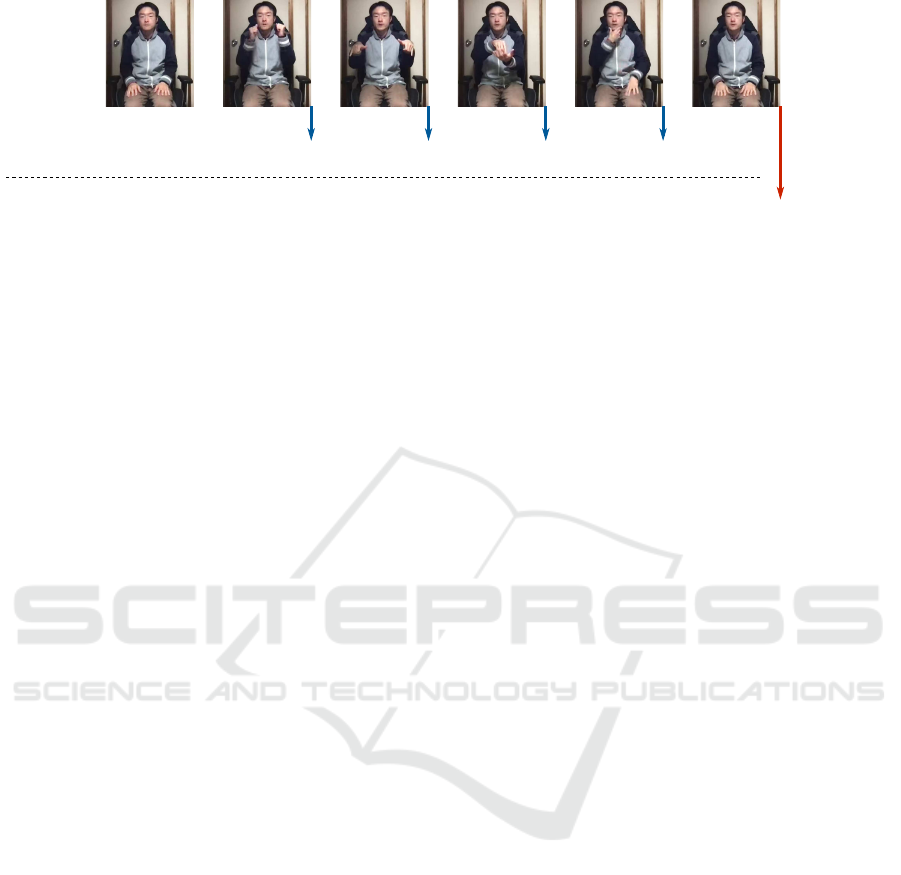
communication systems. Figure 1 illustrates the dif-
ference between online and offline recognition. On
the one hand, online recognition estimates words as
quickly as the signer utters them. On the other hand,
offline recognition waits for the entire sequence be-
fore starting the estimation. Users cannot know con-
tent until their partner’s speaking is finished if of-
fline recognition is applied in a system. This makes
a system difficult to use for real-time communication.
Conventional sign language recognition implicitly as-
sumes an offline situation, and the investigation of
online recognition techniques has not been well re-
searched.
Owing to the aforementioned considerations, the
skeleton-based online sign language recognition was
investigated in this study. Skeleton-based sign lan-
guage recognition has received growing interest (Ku-
mar et al., 2019; De Coster et al., 2020; Li et al., 2020;
Takayama, N., Benitez-Garcia, G. and Takahashi, H.
Skeleton-based Online Sign Language Recognition using Monotonic Attention.
DOI: 10.5220/0010899400003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
601-608
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
601
Input
sequence
... ... ... ... ... ... ...
Online
recognition
Offline
recognition
[Word1] [Word2] [Word3] [Word4]
[Word1],[Word2],...
... wait entire sequence ...
Figure 1: Difference between online and offline recognition. The arrows show yielding words by recognition models.
Jiang et al., 2021; Takayama et al., 2021b) in recent
years because of its practical advantages. For exam-
ple, the tracking points of the human skeleton are ro-
bust against scene variation, and the lightweight data
reduces the learning and estimation time. Moreover,
several state-of-the-art skeleton tracking methods can
be applied to edge devices to achieve edge comput-
ing. These characteristics are essential for a produc-
tion system using online recognition.
A combination of spatial-temporal graph convo-
lutional network (STGCN) (Yan et al., 2018) and re-
current neural network with attention (RNNA) (Bah-
danau et al., 2015) was employed as a base model.
Subsequently, the base model was extended for online
recognition by applying monotonic attention tech-
niques. In this study, three types of monotonic
attention: hard monotonic attention (HMA) (Raf-
fel et al., 2017), monotonic chunkwise attention
(MoChA) (Chiu and Raffel, 2018), and monotonic in-
finite lookback attention (MILK) (Arivazhagan et al.,
2019), were examined.
The proposed models were evaluated using a con-
ventional Japanese sign language (JSL) video dataset
(Takayama et al., 2021b) that included 275 types of
isolated sign language word videos and 113 types of
continuous sign language word videos. Ultimately,
the effectiveness of the proposed models for online
sign language recognition was reported.
In the following sections, the term “individ-
ual word” and “continuous word” indicate “isolated
sign language word” and “continuous sign language
word”, respectively, to avoid redundant representa-
tions.
2 RELATED WORK
Standard sign language recognition is a combination
of framewise feature extraction and temporal recog-
nition. Previous methods have employed a combi-
nation of handcrafted features and statistical tempo-
ral recognition, such as the hidden Markov model
(HMM) (Cooper et al., 2011; Forster et al., 2013).
Currently, DNN has replaced the technical elements
to improve recognition performance.
Koller et al. (Koller et al., 2017) proposed a
continuous word recognition using a hybrid model
based on the convolutional neural network (CNN),
long short term memory (LSTM), and HMM. The su-
periority of data-driven feature extraction performed
by the CNN-LSTM was demonstrated. This method
has since been extended to multi-stream HMM based
on hand shapes, mouthing, and entire bodies (Koller
et al., 2020).
As end-to-end DNN approaches, CNN-LSTM
(Cui et al., 2019), three-dimensional-CNN-LSTM
with hierarchical attention (Huang et al., 2018), and
three-dimensional-ResNet-LSTM (Pu et al., 2019)
have been proposed for continuous word recognition.
These methods incorporate state-of-the-art techniques
derived from action recognition and natural language
processing. Moreover, these methods employ step-
wise training and multitask learning to improve the
model generalization.
In addition to the continuous word recognition, a
few research groups have attempted end-to-end sign
language translation (Camgoz et al., 2018; Camgoz
et al., 2020; Guo et al., 2020; Zhou et al., 2021) in
recent years.
All the aforementioned methods implicitly
premise offline situations in their recognition and
translation, and their performance in online situations
has not been evaluated.
3 CONTINUOUS SIGN
LANGUAGE WORD
RECOGNITION
Continuous word recognition can be mod-
eled as a Seq2Seq learning problem. Let
X
X
X = {x
x
x
1
, . . . , x
x
x
t
, . . . , x
x
x
T
}, x
x
x
t
∈ R
100
and
Y
Y
Y = {y
1
, . . . , y
s
, . . . , y
S
}, y
s
∈ {< start >, < end >, <
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
602

pad >, L
L
L} be an input feature sequence and a word
sequence, respectively. T and S indicate the lengths
of an input feature sequence and a word sequence,
respectively. x
x
x
t
is a set of tracking coordinates in the
human skeleton extracted from the t
th
video frame.
OpenPose (Cao et al., 2021) was used as a human
skeleton tracker in this study. The horizontal and
vertical coordinates of the 50 points, including the
nose, neck, arms, and hands, were employed in this
study. Note that each coordinate was normalized
using the average coordinates of the nose and the
average length between the both shoulders. L
L
L is the
set of words to be recognized. <start>and <end>are
keywords that represent the start and end of the word
sequence, respectively. <pad>is a padding keyword
to ensure that the lengths of the word sequences
are the same. The Seq2Seq models learn optimized
projection X
X
X → Y
Y
Y through training.
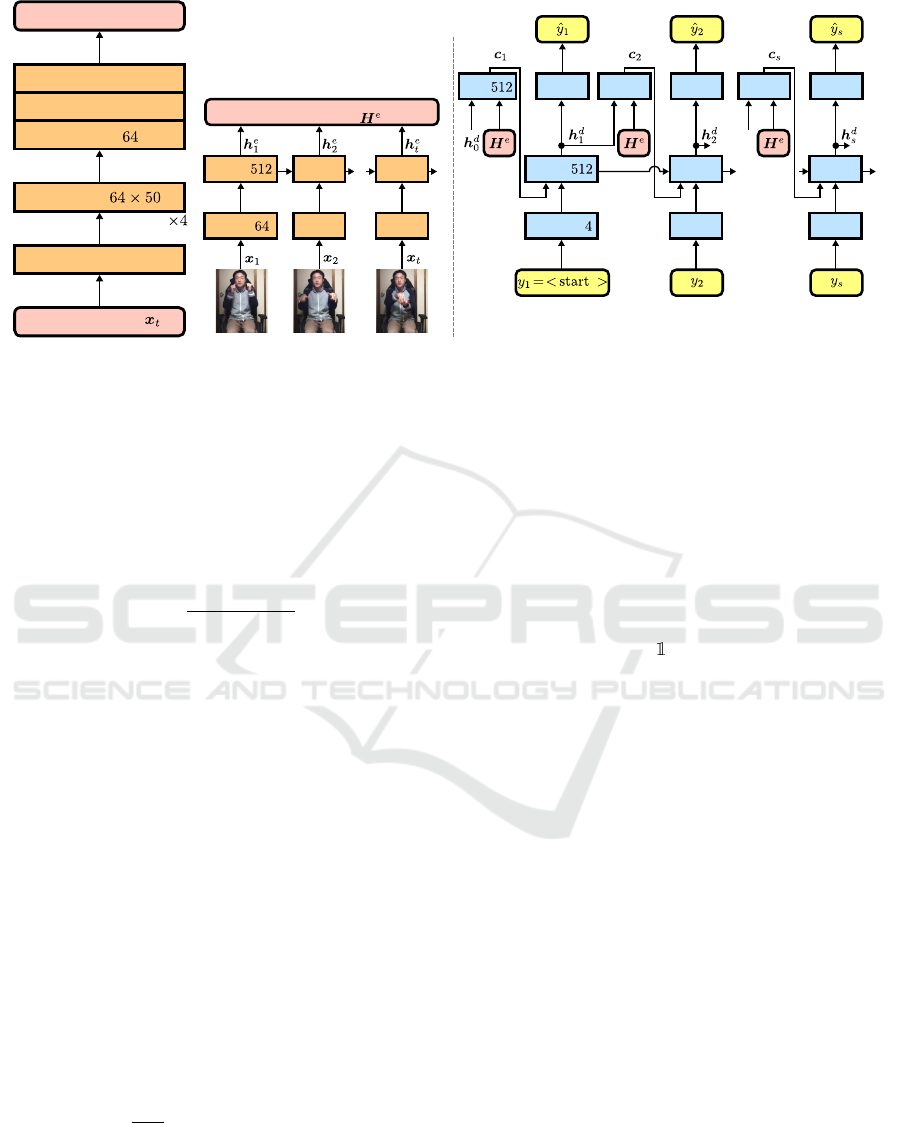
3.1 Architecture Overview
The overview of the proposed model is shown in
Figure 2. Figure 2 (a) and (b) show the framewise
feature extraction module and overall model architec-
ture, respectively. The proposed model comprises an
encoder and a decoder. The encoder converts the in-
put feature sequence into an abstracted hidden vector
sequence. While the encoder converts the entire se-
quence of the input feature X
X
X
1:T
into the hidden vec-
tor sequence H
H
H
e
1:T
in an offline situation, it converts
a chunk of the input feature sequence X
X
X
t:t+u−1
into a
chunk of the hidden vector sequence H
H
H
e
t:t+u−1
in an
online situation, where u is the size of the chunk. The
decoder utilizes the encoder’s hidden vector and input
word sequence to predict the output word autoregres-
sively.
The encoder converts the input feature x
x
x
t
into a
hidden vector h
h
h
e
t
as
h
h
h
e
t
= Encoder(x
x
x
t
, h
h
h
e
t−1
), (1)
where the initial hidden vector h
h
h
e
0
= 0
0
0. In the feature-
extraction module, the input feature x
x
x
t
is first nor-
malized by one-dimensional masked batch normal-
ization (MBN) (Takayama et al., 2021a). Next, the
four cascaded STGCN layers apply graph convolu-
tion to the intermediate feature. STGCN layer ap-
plies spatial and temporal graph convolution accord-
ing to a spatiotemporal graph. The proposed model
employs the same graph definition as the conventional
method (Takayama et al., 2021b). While the STGCN
layer yields a feature map R
C×T ×J
, the subsequent
RNN layer requires a feature vector sequence R
C×T
,
where C and J are the dimensions of channels and
joints. Hence, a linear transformation layer is applied
to transform the feature map into a feature vector se-
quence. Note that TanhExp (Liu and Di, 2020) is em-
ployed as an activation function instead of the ReLU
function in the proposed model. This modification
slightly improved the recognition performance in this
study. Finally, the feature vector sequence is con-
verted into a hidden vector sequence using the RNN
layer. In this study, the gated recurrent unit (GRU)
(Cho et al., 2014) is used for the RNN layer.
The decoder estimates the word sequence autore-
gressively as
ˆy
s
= Decoder(y
s
, h
h
h
d
s−1
, c
c
c
s
), (2)
where h
h
h
d
s
, h
h
h
d
0
= 0
0
0 and c
c
c
s
are a hidden vector of the de-
coder’s RNN layer and a context vector output by the
attention layer, respectively. In the decoder, a one-hot
vector representation of the word index is first con-
verted into a four-dimensional feature vector through
the word-embedding layer. In the training phase, the
correct word y
s
is entered into the word-embedding
layer. In the test phase, the past estimated word ˆy
s−1
is entered into the layer. Simultaneously, the attention
layer yields the context vector c
c
c
s
using the encoder’s
hidden vector sequence H
H
H
e
and the decoder’s past hid-
den vector h
h
h
d
s−1
. The concatenated vector, including
the context vector and output of the word-embedding
layer, is entered into the RNN layer of the decoder.
Finally, the hidden vector is transformed into the re-
sponses of each word using a linear transformation
layer.
3.2 Monotonic Attention
This section briefly introduces the computation of at-
tention layers investigated in this study. The inference
processes of these layers are focused on in this paper.
For the computation in the training phase, please re-
fer to the original papers (Bahdanau et al., 2015; Raf-
fel et al., 2017; Chiu and Raffel, 2018; Arivazhagan
et al., 2019).
3.2.1 Standard Soft Attention
The standard soft attention layer (Bahdanau et al.,
2015) computes the context vector as follows: First,
an energy value e
s,t
is calculated for each frame t at
each output time step s as follows:
e
s,t
= Energy(h
h
h
d
s−1
, h
h
h
e
t
),
= v
v
v
T
σ(W
W
W
d
h
h
h
d
s−1
+W
W
W
e
h
h
h
e
t
+ b
b
b). (3)
σ(·) denotes an activation function. The hyperbolic
tangent was applied to compute the soft attention
in this study. W
W
W
d
∈ R
d×dim(h
h
h
d
)
, W
W
W
e
∈ R
d×dim(h
h
h
e
)
,
Skeleton-based Online Sign Language Recognition using Monotonic Attention
603
1D-MBN
Linear:
1D-MBN
TanhExp
Input feature:
Intermediate feature
STGCN:
(a) Feature extraction.
Hidden states:
FExt
GRU
FExt
GRU
Att
WEmb
GRU
...
Linear Linear
Att
WEmb
GRU
Linear
...
...
...
... ...
...
Encoder Decoder
...
GRU:
Att:
WEmb:
GRU:
FExt:
(b) Overall architecture.
Figure 2: Process overview. “FExt”, “WEmb”, and “Att” indicate feature-extraction, word-embedding, and attention layers,
respectively. The number of layers indicates the dimensions of the output from the layer. The vocabulary determines the
dimension of the decoder’s linear transformation layer.
b
b
b ∈ R
d
, and v
v
v ∈ R
d
are the learnable parameters of
linear layers. d and dim(·) denote the dimensions of
the intermediate feature and hidden vectors, respec-
tively. Furthermore, the energy value e
s,t
is normal-
ized using the softmax function.
α
s,t
=
exp(e
s,t
)
∑
T
i=1
exp(e
s,i
)
(4)
Finally, the context vector c
c
c
s
is computed as a
weighted average of an attention weight α
s,t
and a
hidden vector h
h
h
e
t
.
c
c
c
s
=
T
∑
t=1
α
s,t
h
h
h
e
t
(5)
As described in Equation (5), the computation of
the context vector c
c
c
s
requires the encoder’s hidden
vector sequence of the entire frame H
H
H
e
. This hinders
the application of the model to online recognition.
3.2.2 Hard Monotonic Attention
To address the aforementioned issue of the soft atten-
tion, Raffel et al. proposed the HMA (Raffel et al.,
2017). Similar to the soft attention, the energy value
e
s,t
is first calculated as
e
s,t
= MonotonicEnergy(h
h
h
d
s−1
, h
h
h
e
t
),
= g
v
v
v
T
||v
v
v||
σ(W
W
W
d
h
h
h
d
s−1
+W
W
W
e
h
h
h
e
t
+ b
b
b) + γ, (6)
where g and γ are the learnable parameters that stabi-
lize the computation of the energy value e
s,t
. In this
study, the ReLU function was used as the activation
function for the HMA computation. Next, the energy
value e
s,t
is transformed to a probability p
s,t
using the
sigmoid function.
p
s,t
= Sigmoid(e
s,t
). (7)
Finally, the probability p
s,t
is transformed into a bi-
nary hard attention weight z
s,t
by thresholding. 0.04
was employed as the threshold in this study.
z
s,t
=
p>0.04
(p
s,t
). (8)
At this time, the hidden vector of the frame where
z
s,t
= 1 is assigned as the context vector.
c
c
c
s
= h
h
h
e
t
s
,
t
s
= min{t;t
s−1
≤ t ≤ T, z
s,t
= 1.} (9)
The inference process of the HMA does not require
the entire frame of the encoder’s hidden vector se-
quence. This characteristic is familiar with online
recognition.
3.2.3 Soft Attention over Chunks
Although the HMA is available in online situations,
its context vector relies on a single hidden vector
of the encoder. Therefore, the recognition perfor-
mance tends to be degraded from the soft attention.
MoChA (Chiu and Raffel, 2018) and MILK (Ari-
vazhagan et al., 2019) can remedy this issue by apply-
ing the soft attention over a limited range of frames.
In the inference process, MoChA and MILK cal-
culate the softmax attention from the past frames of
the frame t
s
sampled using the HMA. The inference
processes of MoChA and MILK are as follows: After
the HMA samples the frame t
s
, MoChA and MILK
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
604

compute the energy value as
e
s,i
= ChunkEnergy(h
h
h
d
s−1
, h
h
h
e
i
);i ∈ {t
s
− w + 1, . . . , t
s
}.
(10)
ChunkEnergy(·) is the same as Energy(·), except that
the computation is performed in a limited range of
frames. The ReLU function was employed as the ac-
tivation function in the computation of MoChA and
MILK in this study. w is the window size. MoChA
applies a fixed window size, and w = 4 was employed
in this study. MILK uses a variable-sized window
w = t
s
. The context vector is computed in the same
manner as the standard soft attention, except that the
computation is performed over frames in the window.
c
c
c
s
=
t
s
∑
i=t
s
−w+1
β
s,i
h
h
h
e
i
,
β
s,i
=
exp(e
s,i
)
∑
t
s
j=t
s
−w+1
exp(e
s, j
)
. (11)
β
s,i
indicates an attention weight in the window.
4 EVALUATION
4.1 Dataset
A conventional JSL video dataset (Takayama et al.,
2021b) was used to evaluate the proposed method.
This dataset included 275 types of isolated word
videos and 113 types of continuous word videos per-
formed by 37 signers. All signers were adults who
have experience in JSL. The vocabulary was related
to the conversation at the city office. The videos were
recorded with a smartphone camera. All the video
frames were recorded at 30 frames per second with
640 × 360 pixels.
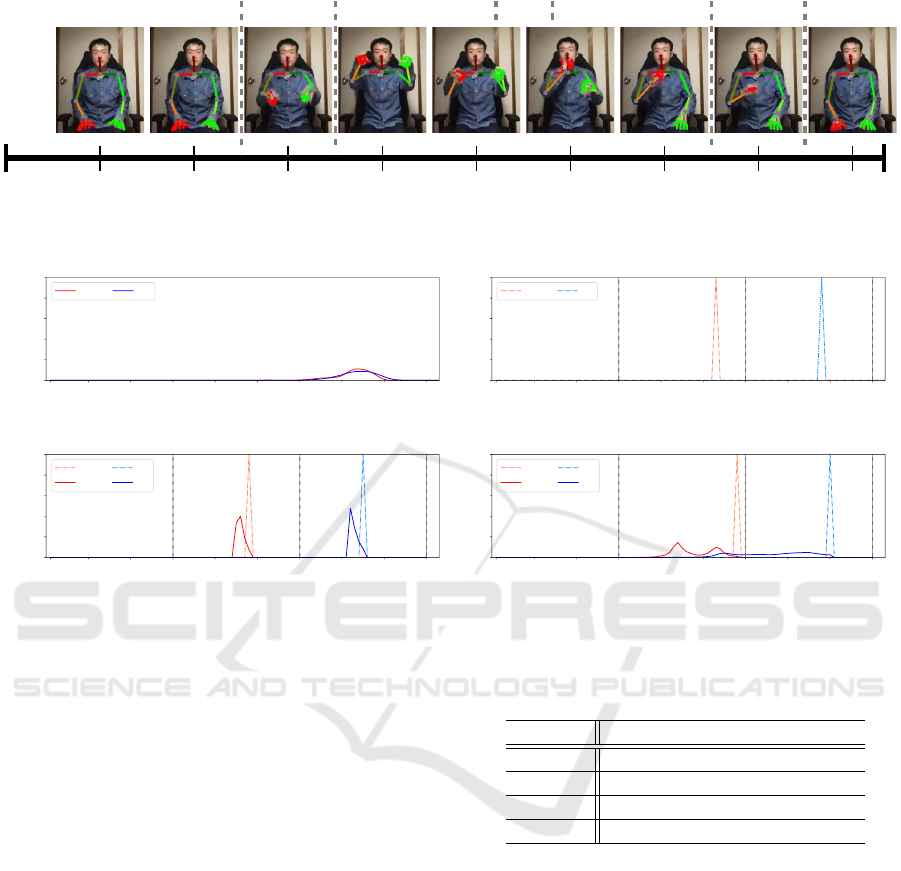
Figure 3 shows an example of a continuous word
video. As shown in Figure 3, the single signer sat
on a chair and performed each word and sentence in
front of the camera. The signers were posed in the
static posture at the beginning and end of the sign.
The frames between these static postures were de-
fined as an action instance. The continuous word con-
sists of “NYUUSEKI” and “KIBOU”, which mean
“registration of marriage” and “hope” in JSL. The
combination of these words represents “I’d like to
register our marriage.” “short pause (SP),” “arm up
(AU),” “transition (TR),” and “arm down (AD)” are
marginal motions that do not have lexical meanings.
The marginal motions were not included in the recog-
nition targets in this study. The tracking points ex-
tracted by OpenPose were used as the inputs, and the
raw video frames were discarded because this study
focuses on skeleton-based sign language recognition.
Table 1: Summy of the dataset.
Subset types Training Test
# of signers 35 2
# of isolated words 22640 (275) 3862 (210)
# of sentences 7466 (113) 1372 (107)
The statistics of the dataset are summarized in
Table 1. The number within the parentheses indi-
cates the number of action types. Horizontally flipped
tracking sequences were included to avoid the effect
of the dominant hand.
4.2 Recognition Performance
The word error rate (WER) was used as the perfor-
mance metric in this study.
W ER =
dist(L
re f
, L
pred
)
|L
re f
|
∗ 100. (12)
dist(·, ·) is Levenshtein distance. L
re f
and L
pred
are
the ground truth and estimated word sequence, re-
spectively. |L| denotes the number of words in a se-
quence.
The training settings are described as follows: The
input feature sequences and word sequences were
padded to have the maximum lengths of T = 578 and
S = 13 during the training, respectively. The batch
size was 32 throughout the training of the recogni-
tion model. The learning rate was set to 0.0003, and
the adaptive moment estimation method (Kingma and
Ba, 2015) was used to update the parameters. The cat-
egorical cross-entropy was applied as a loss function.
150 training epochs were used for all the training pro-
cedures.
The situations where the input feature sequences
are streamed in chunk units were considered for this
study. The recognition performance was evaluated
under the following three conditions.
• Offline: Chunk = {X
X
X
1:T
},
• Online 1: Chunk = {X
X
X
1:u
, . . ., X
X
X
iu+1:(i+1)u
, . . .,
X
X
X
nu+1:T
},
• Online 2: Chunk = {X
X
X
1:u
, . . ., X
X
X
1:(i+1)u
, . . .,
X
X
X
1:T
}.
A chunk size of u = 30 was employed for the online
recognition. The model uses the input chunks un-
changed in “Online 1”. In contrast, the model buffers
the past chunks and utilizes concatenated chunks for
recognition in “Online 2.”
The best word error rate during the training loop
is described in Table 2. As shown in Table 2, the soft
attention achieved the best WER 9.51 in the offline
situation. However, the performance of the soft at-
tention was significantly degraded in the online sit-
Skeleton-based Online Sign Language Recognition using Monotonic Attention
605
Frame index
1 10 20 30 40 50 60 70 80 90
SP AU
[NYUUSEKI] [HOPE]
AD
SPTR
Figure 3: Example of a JSL video. The vertical dashed lines indicate the borders of motion units.
1 10 20 30 40 50 60 70 80 90
Frame index
0.0
0.2
0.4
0.6
0.8
1.0
Attention weight
α
0
α
1
(a) Soft attention.
1 10 20 30 40 50 60 70 80 90
Frame index
0.0
0.2
0.4
0.6
0.8
1.0
Attention weight
z
0
z
1
(b) HMA.
1 10 20 30 40 50 60 70 80 90
Frame index
0.0
0.2
0.4
0.6
0.8
1.0
Attention weight
z
0
β
0
z
1
β
1
(c) MoChA.
1 10 20 30 40 50 60 70 80 90
Frame index
0.0
0.2
0.4
0.6
0.8
1.0
Attention weight
z
0
β
0
z
1
β
1
(d) MILK.
Figure 4: Comparison of the attention weight’s behaviors. The vertical dashed lines in (b)-(d) indicate the borders of the input
chunks. The solid and dashed lines indicate soft attention and hard attention weights, respectively.
uations because these situations violate the soft at-
tention’s prerequisites that entire frames are avail-
able. The monotonic attention methods retained sim-
ilar performance in all situations. As shown in the
results of the online situations, HMA and MILK had
the best WERs 19.47 and 11.08 for “Online 1” and
“Online 2”, respectively. The performance of MILK
was degraded in “Online 1” because this situation vi-
olates MILK’s prerequisites that all past frames are
available. MoChA had the balanced performances in
all cases, and it achieved the second-best WERs 20.03
and 12.88 for “Online 1” and “Online 2”, respectively.
Finally, the behaviors of attention weights of each
attention layer are shown in Figure 4. Figure 4 (a),
(b), (c), and (d) show the behaviors of attention
weights generated by the standard soft attention,
HMA, MoChA, and MILK, respectively. “Offline,”
“Online1,” and “Online2” were applied to the stan-
dard soft attention, HMA and MoChA, and MILK,
respectively, to generate the attention weights in
Figure 4.
As shown in α
0
and α
1
in Figure 4 (a), the stan-
dard soft attention gave weights to the entire input
sequence. The standard soft attention preferred the
Table 2: Recognition performance [%].
Model Offline Online 1 Online 2
Soft 9
9
9.
.
.5
5
51
1
1 75.27 72.22
HMA 12.16 1
1
19
9
9.
.
.4
4
47
7
7 13.65
MoChA 11.12 20.03 12.88
MILK 10.89 31.19 1
1
11
1
1.
.
.0
0
08
8
8
latter part of the input sequence in this examination.
It is expected that the features of this part were suffi-
cient to infer words because there was only one type
of two-word sentence in the dataset. The standard soft
attention does not always attend to the part of the se-
quence that matches the word, and it requires the en-
tire sequence for inference. Therefore, the standard
soft attention is difficult to use in online situations.
In contrast, as shown in z
0
and z
1
in Figure 4 (b),
(c), and (d), the monotonic attention has succeeded
in inferring the first and second words for the second
and third chunks, respectively, in the online situations.
Moreover, as shown in β
0
and β
1
in Figure 4 (c) and
(d), MoChA and MILK gave appropriate weights to
the sequence parts representing each word.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
606

5 CONCLUSION
In this study, skeleton-based online sign language
recognition using monotonic attention was investi-
gated. A total of three monotonic attention techniques
were applied to continuous sign language word recog-
nition based on the STGCN-RNNA model. The ef-
fectiveness of the monotonic attention for online con-
tinuous sign language word recognition was demon-
strated through the results of the evaluation using the
JSL video dataset.
Seq2Seq-based online recognition has been well
researched within the speech recognition and nat-
ural language processing domains. Recently,
Transformer-based online recognition methods have
also been proposed (Tsunoo et al., 2019; Inaguma
et al., 2020; Miao et al., 2020; Li et al., 2021) in the
field. Future studies will include investigations on the
applicability of these methods to online sign language
recognition.
Furthermore, the authors have considered online
sign language translation as an interesting research
topic for future studies. The techniques for simulta-
neous translation in natural language processing (Gu
et al., 2017; Dalvi et al., 2018; Ma et al., 2019) can be
expected to contribute in this direction.
ACKNOWLEDGEMENTS
This research is supported by SoftBank Corp.
REFERENCES
Arivazhagan, N., Cherry, C., Macherey, W., Chiu, C.-C.,
Yavuz, S., Pang, R., Li, W., and Raffel, C. (2019).
Monotonic infinite lookback attention for simultane-
ous machine translation. In Proceedings of the 57th
Annual Meeting of the Association for Computational
Linguistics, pages 1313–1323.
Bahdanau, D., Cho, K., and Bengio, Y. (2015). Neural ma-
chine translation by jointly learning to align and trans-
late. In Proceedings of the Third International Con-
ference on Learning Representations, pages 1–15.
Camgoz, N. C., Hadfield, S., Koller, O., Ney, H., and Bow-
den, R. (2018). Neural sign language translation. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 7784–7793.
Camgoz, N. C., Koller, O., Hadfield, S., and Bowden, R.
(2020). Sign language transformers: Joint end-to-end
sign language recognition and translation. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 10023–10033.
Cao, Z., Hidalgo, G., Simon, T., Wei, S.-E., and Sheikh,
Y. (2021). Openpose: Realtime multi-person 2d pose
estimation using part affinity fields. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
43(1):172–186.
Chiu, C.-C. and Raffel, C. (2018). Monotonic chunkwise
attention. In Proceedings of the Sixth International
Conference on Learning Representations, pages 1–16.
Cho, K., van Merri
¨
enboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014).
Learning phrase representations using RNN encoder–
decoder for statistical machine translation. In Pro-
ceedings of the Conference on Empirical Methods in
Natural Language Processing, pages 1724–1734.
Cooper, H., Pugeault, N., and Bowden, R. (2011). Reading
the signs: A video based sign dictionary. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision Workshops, pages 914–919.
Cui, R., Liu, H., and Zhang, C. (2019). A deep neural
framework for continuous sign language recognition
by iterative training. IEEE Transactions on Multime-
dia, 21(7):1880–1891.
Dalvi, F., Durrani, N., Sajjad, H., and Vogel, S. (2018). In-
cremental decoding and training methods for simul-
taneous translation in neural machine translation. In
Proceedings of the Annual Conference of the North
American Chapter of the Association for Computa-
tional Linguistics: Human Language Technologies,
pages 493–499.
De Coster, M., Van Herreweghe, M., and Dambre, J. (2020).
Sign language recognition with transformer networks.
In Proceedings of the Twelveth Language Resources
and Evaluation Conference, pages 6018–6024.
Forster, J., Koller, O., Oberd
¨
orfer, C., Gweth, Y., and
Ney, H. (2013). Improving continuous sign language
recognition: Speech recognition techniques and sys-
tem design. In Proceedings of the Fourth Workshop on
Speech and Language Processing for Assistive Tech-
nologies, pages 41–46.
Gu, J., Neubig, G., Cho, K., and Li, V. O. (2017). Learning
to translate in real-time with neural machine transla-
tion. In Proceedings of the 15th Conference of the Eu-
ropean Chapter of the Association for Computational
Linguistics, pages 1053–1062.
Guo, D., Zhou, W., Li, A., Li, H., and Wang, M. (2020).
Hierarchical recurrent deep fusion using adaptive clip
summarization for sign language translation. IEEE
Transactions on Image Processing, 29:1575–1590.
Huang, J., Zhou, W., Zhang, Q., Li, H., and Li, W. (2018).
Video-based sign language recognition without tem-
poral segmentation. In Proceedings of the 32nd AAAI
Conference on Artificial Intelligence, pages 2257–
2264.
Inaguma, H., Mimura, M., and Kawahara, T. (2020). En-
hancing monotonic multihead attention for streaming
asr. In Proceedings of the 21st INTERSPEECH, pages
2137–2141.
Jiang, S., Wang, L., Bai, Y., Li, K., and Fu, Y. (2021). Skele-
ton aware multi-modal sign language recognition. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition Workshops.
Skeleton-based Online Sign Language Recognition using Monotonic Attention
607

Kingma, D. P. and Ba, J. (2015). Adam: A method for
stochastic optimization. In Proceedings of the third In-
ternational Conference on Learning Representations.
Koller, O., Camgoz, N. C., Ney, H., and Bowden, R. (2020).
Weakly supervised learning with multi-stream cnn-
lstm-hmms to discover sequential parallelism in sign
language videos. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 42(9):2306–2320.
Koller, O., Zargaran, S., and Ney, H. (2017). Re-sign: Re-
aligned end-to-end sequence modelling with deep re-
current cnn-hmms. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 3416–3424.
Kumar, D. A., Sastry, A. S. C., Kishore, P. V. V., Kumar,
E. K., and Kumar, M. T. K. (2019). S3drgf: Spatial 3-
d relational geometric features for 3-d sign language
representation and recognition. IEEE Signal Process-
ing Letters, 26(1):169–173.
Li, D., Rodriguez, C., Yu, X., and Li, H. (2020). Word-
level deep sign language recognition from video: A
new large-scale dataset and methods comparison. In
Proceedings of the IEEE/CVF Winter Conference on
Applications of Computer Vision, pages 1459–1469.
Li, M., Zoril
˘
a, C., and Doddipatla, R. (2021). Transformer-
based online speech recognition with decoder-end
adaptive computation steps. In Proceedings of the
IEEE Spoken Language Technology Workshop, pages
1–7.
Liu, X. and Di, X. (2020). Tanhexp: A smooth activation
function with high convergence speed for lightweight
neural networks. arXiv preprint arXiv:2003.09855.
Ma, M., Huang, L., Xiong, H., Zheng, R., Liu, K., Zheng,
B., Zhang, C., He, Z., Liu, H., Li, X., Wu, H., and
Wang, H. (2019). Stacl: Simultaneous translation
with implicit anticipation and controllable latency us-
ing prefix-to-prefix framework. In Proceedings of the
57th Annual Meeting of the Association for Computa-
tional Linguistics, pages 3025–3036.
Miao, H., Cheng, G., Gao, C., Zhang, P., and Yan, Y.
(2020). Transformer-based online ctc/attention end-
to-end speech recognition architecture. In Proceed-
ings of the IEEE International Conference on Acous-
tics, Speech and Signal Processing, pages 6084–6088.
Moryossef, A., Tsochantaridis, I., Aharoni, R., Ebling, S.,
and Narayanan, S. (2020). Real-time sign language
detection using human pose estimation. In Proceed-
ings of the European Conference on Computer Vision
Workshops, LNCS 12536, pages 237–248.
Papastratis, I., Dimitropoulos, K., Konstantinidis, D., and
Daras, P. (2020). Continuous sign language recog-
nition through cross-modal alignment of video and
text embeddings in a joint-latent space. IEEE Access,
8:91170–91180.
Pu, J., Zhou, W., and Li, H. (2019). Iterative alignment
network for continuous sign language recognition. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 4160–
4169.
Raffel, C., Luong, M.-T., Liu, P. J., Weiss, R. J., and Eck,
D. (2017). Online and linear-time attention by enforc-
ing monotonic alignments. In Proceedings of the 34th
International Conference on Machine Learning, vol-
ume 70, pages 2837–2846.
Takayama, N., Benitez-Garcia, G., and Takahashi, H.
(2021a). Masked batch normalization to improve
tracking-based sign language recognition using graph
convolutional networks. In Proceedings of the IEEE
International Conference on Automatic Face and Ges-
ture Recognition.
Takayama, N., Benitez-Garcia, G., and Takahashi, H.
(2021b). Sign language recognition based on
spatial-temporal graph convolution-transformer. Jour-
nal of Japan Society for Precision Engineering,
87(12):1028–1035.
Tsunoo, E., Kashiwagi, Y., Kumakura, T., and Watan-
abe, S. (2019). Towards online end-to-end trans-
former automatic speech recognition. arXiv preprint
arXiv:1910.11871.
Yan, S., Xiong, Y., and Lin, D. (2018). Spatial temporal
graph convolutional networks for skeleton-based ac-
tion recognition. In Proceedings of the 32nd AAAI
Conference on Artificial Intelligence, pages 7444–
7452.
Zhou, H., Zhou, W., Qi, W., Pu, J., and Li, H. (2021).
Improving sign language translation with monolin-
gual data by sign back-translation. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 1316–1325.
Zhou, M., Ng, M., Cai, Z., and Ka, C. C. (2020). Self-
attention-based fully-inception networks for continu-
ous sign language recognition. In Proceedings of the
24th European Conference on Artificial Intelligence,
volume 325 of Frontiers in Artificial Intelligence and
Applications, pages 2832–2839.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
608
