
Heart Rate Estimation based on Optical Flow: Enabling Smooth Angle
Changes in Ultrasound Simulation
Henning Sch
¨
afer
1,2 a
, Hendrik Damm
1,3 b
and Christoph M. Friedrich
1,4 c
1
Department of Computer Science, University of Applied Sciences and Arts Dortmund (FHDO), Dortmund, NRW, Germany
2
Institute for Transfusion Medicine, University Hospital Essen, Essen, NRW, Germany
3
Institute of Epidemiology and Social Medicine, University of M
¨
unster, M
¨
unster, NRW, Germany
4
Institute for Medical Informatics, Biometry and Epidemiology (IMIBE), University Hospital Essen, Essen, NRW, Germany
Keywords:
Biomedical Image Processing, Ultrasound Imaging, Vascular Imaging, Image Visualization, Functional Image
Analysis, 3D Video-based Ultrasound Simulation.
Abstract:
Ultrasound simulators show previously recorded ultrasound videos from different angles to the trainee. During
acquisition, breathing, pulse, and other motion artifacts are involved, which often prevent a smooth image
transition between different angles during simulation. In this work, a global motion vector is derived using
the Lucas–Kanade method for calculating the optical flow in order to create a motion profile in addition to the
recording. This profile allows transition synchronization in ultrasound simulators. For the transition in kidney
recordings, the Pearson’s r correlation could be increased from 0.252 to 0.495 by autocorrelating motion
profiles and synchronizing them based on calculated delays. Approaches based on tracking and structural
similarity were also evaluated, yet these have shown inferior qualitative transition results. In ultrasound videos
with visibility of vessels, e.g., thyroid gland with carotid artery or echocardiogram, the heart rate can also be
estimated via the optical flow. In the abdominal region, the signal contains respiratory information. Since the
motion profile can be generated in real time directly at the transducer position, it could be useful for diagnostic
purposes.
1 INTRODUCTION
An ultrasound simulator is a medical simulation train-
ing device that enables trainees to practice diagnos-
tic, therapeutic, and surgical applications related to
ultrasound-based imaging techniques. To achieve
these training results, simulators mimic the ultra-
sound image. An ultrasound simulator, 3D video-
based, shows previously recorded ultrasound videos
from different angles. When the trainee moves the
transducer, e.g., an imitation with a gyroscope sensor,
transitions should be made between the recordings
from the different angles so that a realistic scenario
of the sounding of an organ can be reproduced. Dur-
ing angle transition, hard image jumps can occur (see
Figure 1). This is because of respiration, pulse, and
other motion artifacts that were recorded at the time of
acquisition. Here, a structures to be observed jumps
a
https://orcid.org/0000-0002-4123-0406
b
https://orcid.org/0000-0002-7464-4293
c
https://orcid.org/0000-0001-7906-0038
further (see previous position based on red line), be-
cause the asynchronous angle change causes the res-
piration to be in a different cycle. In order to pre-
vent these jumps during simulation, a synchronization
of the recordings from the different angles is needed.
The objective of this work is to apply and evaluate
different methods to investigate their suitability for
synchronizing ultrasound acquisitions from different
angles. An overview on other approaches for ultra-
sound simulators can be seen in (Ourahmoune et al.,
2012; Blum et al., 2013). Starting from an arbitrary
frame of one angle, the best matching frame from the
target angle is to be selected, so that there are mini-
mal artifacts as possible during transition. Both an-
gles need to be synchronized with respect to respi-
ration and pulse. Previous approaches to synchro-
nize the images by recording the respiration and the
pulse could not always enable a smooth change. The
abdominal region, where vascular and thoracic res-
piratory motion affect the ultrasound image, is con-
sidered to be challenging. For this work, videos of or-
gans were acquired at different angles. These are each
236
Schäfer, H., Damm, H. and Friedrich, C.
Heart Rate Estimation based on Optical Flow: Enabling Smooth Angle Changes in Ultrasound Simulation.
DOI: 10.5220/0010902000003123
In Proceedings of the 15th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2022) - Volume 4: BIOSIGNALS, pages 236-243
ISBN: 978-989-758-552-4; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

10 seconds long and have a frame count of 30 frames
per second. They are to be displayed to the trainee in
a continuous loop to simulate a real ultrasound image.
A transducer mockup with a gyroscope is used to esti-
mate its angle for selection of the respective imaging
output from recordings. In the case of a change of an-
gle, transitions occur, which are to be synchronized by
means of different approaches, which are presented in
this work.
In the remainder of this paper, Section 2 provides
a short overview of related work and state of the art
approaches. Section 3 describes the methods used in
this paper. In Section 4 the obtained results are evalu-
ated and finally concluded afterwards in Section 5.
(a) Kidney 90 degrees (b) Kidney 95 degrees
Figure 1: Transition through a kidney examination, (a)
shows imaging output at 90°, (b) shows imaging output at
95° with a motion artifact due to respiration (marked in red).
2 RELATED WORK
This section describes related work used for synchro-
nization approaches.
2.1 Optical Flow
Optical flow is a commonly used method for mo-
tion estimation in a scene with a wide range of ap-
plications. Many gradient-based methods such as the
Horn-Schunck method (Horn and Schunck, 1981) and
the Lucas-Kanade method (Lucas and Kanade, 1981)
have been developed to estimate optical flow based on
the calculation of brightness gradients.
In the gradient-based methods, partial derivatives
with respect to temporal coordinates are calculated
as brightness gradients (Kearney et al., 1987). As
soon as objects in a scene move with high velocities,
the gradient-based methods are less suitable (Lawton,
1983). Gradient-based optical flow methods, unlike
correlation-based flow methods (Bergen et al., 1990;
Lawton, 1983) can be computed more quickly and
are suitable for real-time estimation of optical flow.
The Lucas-Kanade method is a widely used differ-
ential method for estimating optical flow proposed
by Bruce D. Lucas and Takeo Kanade (Lucas and
Kanade, 1981). It assumes that the optical flow in the
neighborhood of the pixel is a constant, and then uses
the least squares method to solve the basic equation
of optical flow for all pixels in the neighborhood.
2.2 Structural Similarity
From a study on tracking in ultrasound images of the
tongue (Xu et al., 2016), the Complex Wavelet Struc-
tural Similarity Index (CW-SSIM) behaves uniformly
and predictably for slight rotations in ultrasound im-
ages. To this end, different metrics for calculating
similarity were compared for rotations ranging from
-10°to 10°+ in an ultrasound image.
The Structural Similarity Index (SSIM) is a
method for measuring the similarity between two im-
ages (Wang et al., 2004). The index is often under-
stood as a quality measure against the image to be
compared, e.g. altered by noise.
The metric is based on the assumption that the hu-
man visual system (HVS) model is more responsive to
structural changes. Therefore, a measure that quanti-
fies structural similarity should be a good approxima-
tion of the actual changes perceived by the HVS.
The CW-SSIM index (Sampat et al., 2009) is an
extension of the SSIM to the complex wavelet do-
main, which is more robust to certain image changes
(e.g., translation and rotation).
2.3 Tracking
During the tracking approach, various frames of an
angle should be downstreamed at random intervals to
verify that tracking of the structure continues. The
assumption is that if the tracking of a structure can be
continued successfully, there is a smooth change of
angle.
The Discriminative Correlation Filter with Chan-
nel and Spatial Reliability (DCF-CSR) is a tracking
method for short-term tracking of structures (Bolme
et al., 2010; Luke
ˇ
zi
ˇ
c et al., 2018). Here, tracking
using Correlation Filter has been extended to DCF
tracking by the concepts of channel and spatial reli-
ability. Spatial reliability adjusts filter support to the
region of the object selected for tracking. This allows
both an increase in search area and better tracking of
non-rectangular objects (Luke
ˇ
zi
ˇ
c et al., 2018).
With only two features, histogram of oriented gra-
dients (HoGs) and colornames, the CSR-DCF method
achieves state-of-the-art results on several tracking
challenges (VOT 2016, VOT 2015, and OTB100)
(Matej et al., 2016; Roffo et al., 2016; Wu et al.,
2015). The CSR-DCF runs in real-time on a CPU.
Heart Rate Estimation based on Optical Flow: Enabling Smooth Angle Changes in Ultrasound Simulation
237

2.4 Heart Rate Estimation
One way of enriching the ultrasound images with fur-
ther information is to indicate the heart rate. If this
was not recorded at the time of acquisition, it can
be reconstructed by visual image processing. Theo-
retically, this possibility exists whenever image areas
of the ultrasound are directly or indirectly exposed
to changes caused by the expansion of blood vessels.
Puybareau et al. (Puybareau et al., 2015) use fish em-
bryos to show that the optical flow of blood vessels in
the heart can be used to reconstruct the pulse. Further-
more, a distinction between artery and vein could be
derived from clustering of the speed vectors. Bouk-
erroui et al. (Boukerroui et al., 2003) show that the
movement of the endocardium (innermost layer of the
heart wall) in the left ventricle can be tracked based
on ultrasound images using velocity estimation. The
movements of the left ventricle were recorded over
time similar to the tracking of fish embryo vessels
(Puybareau et al., 2015).
3 METHODS
The approaches described in Section 2, namely op-
tical flow (see Section 3.1), CW-SSIM (see Section
3.3), and tracking with DCF-CSR (see Section 3.2),
will be applied to different ultrasound recordings. For
this purpose, videos of the kidney, thyroid and differ-
ent views of the heart (echocardiography)
1
, as well
as the abdomen (gallbladder) will be used. Except
for the cardiac ultrasound, all recordings for this work
were acquired in 30 FPS and are always 10 seconds
long
2
. For each image, there is a corresponding angle
spectrum from approximately -30° to +30° in 5° de-
gree steps (see Figure 2).
(a) Kidney (b) Gallbladder
Figure 2: (a) Image of the kidney with structures partially
moving due to pulse and respiration, (b) Image of the gall-
bladder with movement of the abdomen due to respiration.
1
Echocardiography views were taken from
https://youtu.be/2XR6etAY -w, last accessed: 07.11.2021
2
Acquired from ZONARE ZS3, C6-2, convex trans-
ducer, 2-6 MHz.
3.1 Optical Flow Calculation via
Lucas–Kanade
The Lucas-Kanade method is used to approximate the
optical flow. For this purpose, the original image is
divided into smaller sections. The basic calculation
of the algorithm (Lucas and Kanade, 1981; Ishii et al.,
2011) is shown in equation (1).
I
t
+ υ
x
I
x
+ υ
y
I
y
= 0 (1)
I(x, y,t) describes the brightness of a pixel at po-
sition (x,y) at time t. If I(x,y,t) does not change ex-
cessively between frames, the optical flow can be cal-
culated using equation (1), where I
x
, I
y
and I
t
are the
partial derivatives of I(x,y,t) resolved to x, y and t. υ
x
and υ
y
describe the velocity, i.e., the momentum of
motion associated with the optical flow of I(x,y,t). It
is now assumed that υ
x
and υ
y
remain constant over
a smaller range, from which equation (2) is derived
(Ishii et al., 2011).
S
xx
υ
x
+ S
xy
υ
y
+ S
xt
= 0
S
xy
υ
x
+ S
yy
υ
y
+ S
yt
= 0
(2)
Where S
xx
, S
xy
, S
yy
, S
xt
and S
yt
are the product
sums of the partial derivatives of I
x
, I
y
and I
t
in the
costant small range Γ (shown in equation (3)) (Ishii
et al., 2011).
S
xx
=
∑
Γ
I
x
I
x
,S
xy
=
∑
Γ
I
x
I
y
,S
y
y =
∑
Γ
I
y
I
y
S
xt
=
∑
Γ
I
x
I
t
,S
yt
=
∑
Γ
I
y
I
t
(3)
The velocity in x and y direction can be calculated
by solving equation (2) over equation (4) (Ishii et al.,
2011).
υ
x
υ
y
=
S
yy
S
xt
−S
xy
S
yt
S
xx
S
yy
−S
2
xy
−S
xy
S
xt
+S
xx
S
yt
S
xx
S
yy
−S
2
xy
(4)
By using the velocity vectors υ
x
, υ
y
the move-
ment of pixels with constant brightness of a region
is obtained. Since in ultrasound images the inten-
sity of structures does not change much and there-
fore strong jumps are not to be expected, the Lucas-
Kanade method is considered to be suitable for esti-
mating optical flow.
3.1.1 Global Motion Profile Generation via
Lucas–Kanade
In order to smoothly change the angle between the
recordings of an organ at any frame, a global motion
profile is to be generated. For this purpose, the veloc-
ity of a zone is calculated for each frame in compari-
son to the previous frame.
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
238

To optimize the calculation, the image is divided
into 8 × 8 zones. The size of the zone depends on
the resolution of the ultrasound recording. Since the
motion profile can be preprocessed for the transitions,
small zones at high resolution are also possible. Here,
the distribution of apparent velocities in direction u
and v yields an average movement of brightness pat-
tern D (Du
xy
and Dv
xy
) of a 8 × 8 pixel zone at time
t
1
.
The idea for motion profiling is now based on the
fact that the average of all movements within a frame
gives a global motion tendency DG of the optical flow
(DG
u
and DG
v
) (see equation (5)), where k stands for
the number of all 8× 8 regions in an ultrasound frame.
DG
u
DG
v
=
∑
k
Du
xy
k
∑
k
Dv
xy
k
(5)
The global movement of brightness DG
u
and DG
v
measured over the duration of the recording gives the
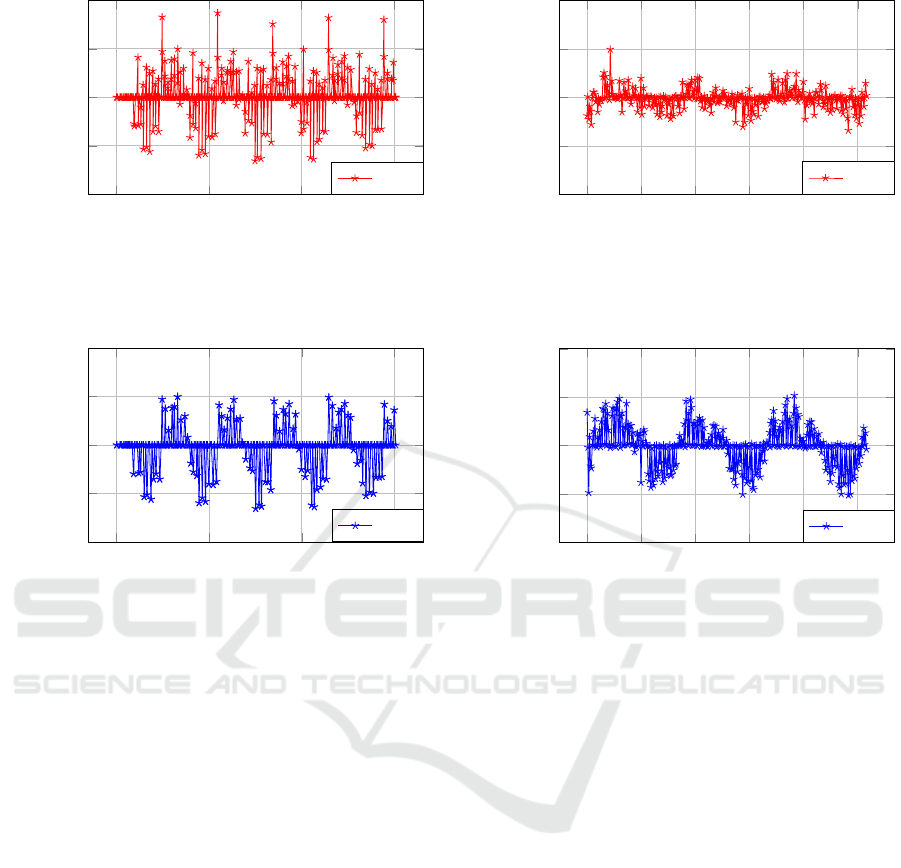
motion profile of an ultrasound video. Figure 3 shows
such a motion profile to an echocardiogram recorded
over 3 seconds of DG in the direction u, the movement
on the horizontal axis. Figure 4 shows DG in the v
direction, the movement on the vertical axis.
3.1.2 Heart Rate Estimation via Global Motion
Profiles
To estimate the heart rate from a raw optical flow sig-
nal, the Pan-Tompkins method (Pan and Tompkins,
1985) is used. The Pan-Tompkins method applies a
series of filters to emphasize the frequency content of
the cardiac depolarization.
The values determined by optical flow are the ve-
locity values in m/s from equation (5). Due to the
adaptive threshold, the algorithm should still be able
to reliably detect an edge from the raw signal, pro-
vided that a vessel is recorded.
3.2 Discriminative Correlation Filter
with Channel and Spatial Reliability
Tracking of structures is also a possible approach to
prevent image jumps during changeover. The struc-
tures changing due to respiration and pulse over the
period of the ultrasound recording could be recog-
nized in the frames of the recording of the next angle.
Here, out of all the frames in which tracking can
be continued, the frame with the smallest distance of
the tracked area from the original frame is assumed
to achieve a continuation of the natural motion. The
opencv (Bradski, 2000) implementation was used.
3.3 Complex Wavelet Structural
Similarity
For this method, a random frame was taken from the
recordings of a kidney (source frame) and compared
with all possible frames in the next angle of the ul-
trasound recording using the Similiarity Index (CW-
SSIM).
4 EVALUATION
The presented methods have been evaluated with re-
spect to their suitability for smooth angle changes in
ultrasound simulators.
4.1 Optical Flow
To enable synchronized angle changes, the optical
flow motion profiles of different angles on ultrasound
images of a same organ are assumed to be signals that
correlate with themselves at an earlier time. These re-
current movements, e.g., due to respiration, can there-
fore be synchronized by determining the lag to an ad-
jacent angle.
For example, in the ultrasound simulator the
recording is permanently shown from angle 90 de-
grees. If the trainee decides to change the view to
95 degrees, the lag is resolved via autocorrelation
(Bracewell, 1978), resulting in a synchronous change.
For this purpose, the lag to the pre-signal is compen-
sated and the result is translated into the appropriate
frame on the time axis, so that the new image contin-
ues e.g. at the same time of the breathing phase. The
synchronization of the angle changes by the motion
profiles in horizontal and vertical direction by means
of shifting the lag was tested by carrying out angle
changes at random time, in each case with and with-
out synchronization. Without synchronization, struc-
tures of the ultrasound image suddenly appear at other
positions after the change, because they have shifted
at the time of acquisition, e.g. due to respiration or
pulse. Such a jump can be seen in Figure 1. With
synchronization, it is also clearly visible that the an-
gle has changed, but the moving structures to be ob-
served are continued in their movement, resulting in a
smooth change.
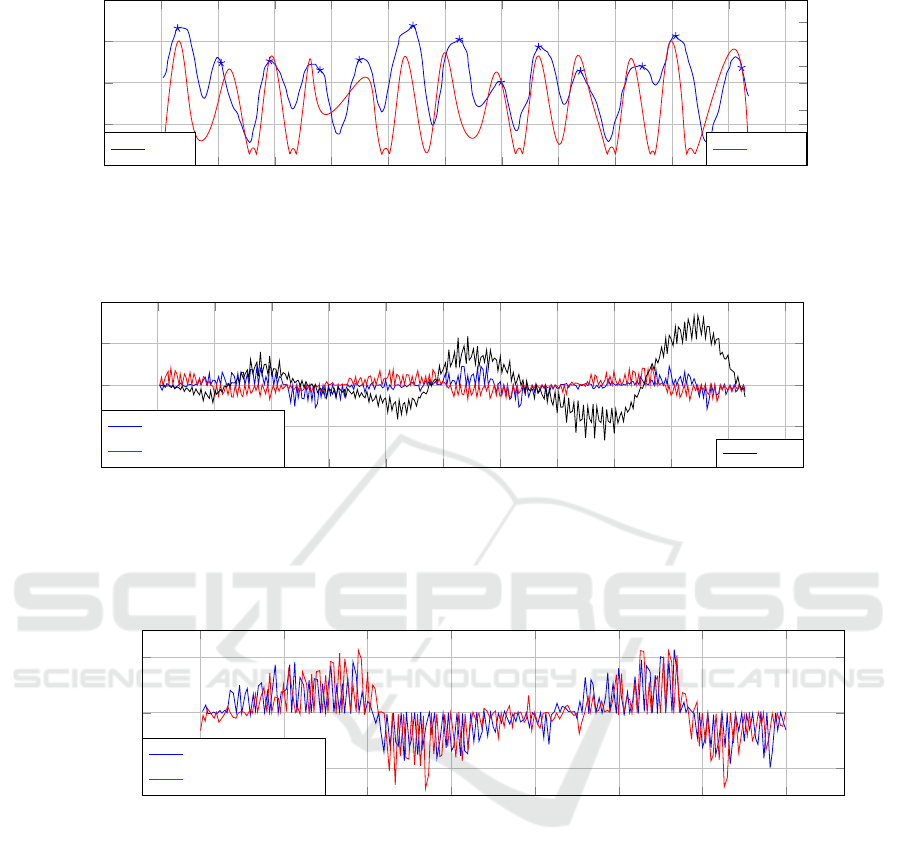
The application of the signals of two angles
aligned by the determined lag through autocorrelation
(see Figure 8) can be seen in Figure 9. After shifting
by the compensated lag, these result in a synchronized
motion profile. To ensure that the motion profile con-
tain valuable information, profiles of recordings with
Heart Rate Estimation based on Optical Flow: Enabling Smooth Angle Changes in Ultrasound Simulation
239
0 1 2 3
−1
−0.5
0
0.5
1
time (s)
velocity(m/s)
DG
u
Figure 3: Global movement DG as velocity (m/s) in direc-
tion u (horizontal axis) determined in an echocardiogram
measured over time (s).
0 1 2 3
−1
−0.5
0
0.5
1
time (s)
velocity(m/s)
DG
v
Figure 4: Global movement DG as velocity (m/s) in di-
rection v (vertical axis) determined in an echocardiogram
measured over time (t).
movements through vessels as well as through res-
piration were generated. Figure 3 shows the global
movement DG as velocity (m/s) in direction u (hor-
izontal axis) determined in an echocardiogram mea-
sured over time (t). Figure 4 shows the recording cor-
respondingly in vertical axis. The 3-second recording
is from the coronary venous sinus view of the heart.
Here, the heart rate of 5 beats in 3 seconds is visible
on both axes and can be read visually. The motion
profile could also be interpreted well in other views
such as the full view (four chamber view) or the mi-
tral valve.
For organs in the abdominal region, such as the
gallbladder, the expansion of the thorax due to respi-
ration is the main factor for movements in the ultra-
sound image. Figure 5 shows the global movement
DG in horizontal axis determined in the abdomen
(gallbladder) measured over a period of about 10 sec-
onds. Here, the motion is not visible because the ac-
quisition was horizontal and therefore the respiratory
motion is mainly in the direction of the vertical axis.
Figure 6 shows the global movement DG in verti-
cal axis. The respiratory cycle can be read well. In the
period of 10 seconds, 3 respiratory cycles took place.
0 2 4
6
8 10
−0.4
−0.2
0
0.2
0.4
time (s)
velocity(m/s)
DG
u
Figure 5: Global movement DG as velocity (m/s) in direc-
tion u (horizontal axis) determined in the abdomen (gall-
bladder) measured over time (s).
0 2 4
6
8 10
−0.4
−0.2
0
0.2
0.4
time (s)
velocity(m/s)
DG
v
Figure 6: Global movement DG as velocity (m/s) in direc-
tion v (vertical axis) determined in the abdomen (gallblad-
der) measured over time (s). Here visible, the 3-fold respi-
ratory cycle.
4.1.1 Heart Rate Estimation
Figure 7 shows the estimation of heart rate with the
Pan-Tompkins method (blue markers). Here, an ultra-
sound video of the aorta was used to determine optical
flow.
The optical flow was smoothed with a Gaussian
filter and then overlaid with data obtained from a
pulse oximeter worn on the left index finger. The
pulse was recorded synchronously in addition to the
optical flow during ultrasound acquisition. The opti-
cal flow and the pulse curve correlate with each other.
The adaptive threshold allows the algorithm to
perform edge detection from the raw signal and es-
timate the heart rate by counting detected peaks, pro-
vided a vessel is recorded.
4.2 Tracking with DCF-CSR
For this experiment, several images of the kidney
were chosen with smaller artifacts that change with
respiration and/or pulse. During tracking, different
frames of an applied angle were then downstreamed
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
240
−1 0 1 2 3 4
5 6
7 8 9 10 11
−1
−0.5
0
0.5
1
0
200
400
600
time (s)
velocity(m/s)
pulse oxi(nm)
DG
v
pulse
Figure 7: Estimation of heart rate using Pan-Tompkins method on the raw signal of the motion profile and the pulse oximeter
for validation (in this case, ultrasound of the aorta on the vertical axis).
0 1 2 3 4
5 6
7 8 9 10 11
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
time (s)
velocity(m/s)
correlation
Kidney 90
◦
DG
v
Kidney 95
◦
DG
v
corr
Figure 8: Vertical motion profiles of ultrasound recordings of the kidney at two different angles and the corresponding cross-
correlation. A lag of 3 seconds in the respiratory cycle at the two angles results from the different start times of the ultrasound
acquisition and can be seen in the motion profile here. Pearson r correlation coefficient between both angles (without resolving
lag) is 0.252.
3 4
5 6
7 8 9 10
−0.2
0
0.2
time (s)
velocity(m/s)
Kidney 90
◦
DG
v
Kidney 95
◦
DG
v
Figure 9: Synchronized motion profile, shifted over lag determined by autocorrelation. By compensating for lag, the moving
structures to be observed are continued in their movement. In this example, pearson r correlation increases from 0.252 to
0.4953 by synchronizing the lag.
at randomly selected intervals to check whether the
tracking of the structure can be continued.
Since the search range in DCF-CSR is very high,
errors often occured and another structure was contin-
ued. Tracking beyond the angle change is error-prone,
as the object may no longer be visible. The carotid
artery near the thyroid gland could be tracked well,
but not with sufficiently high FPS. Accordingly, the
tracking would have to be preprocessed.
This approach also lacks the tendency of the
movement, i.e. the position of the object can be at
the same place e.g. when exhaling and inhaling with
a different momentum each time, but this is not con-
sidered in the search range of the tracking in the new
angle.
4.3 Frame Comparison with CW-SSIM
For this experiment, a random frame was taken from
the image of a kidney (source frame) and compared
with all possible frames in the next angle of the ultra-
sound image using the Similiarity Index (CW-SSIM).
The structure of interest moved horizontally during
the acquisition, so it is necessary to find a frame that
Heart Rate Estimation based on Optical Flow: Enabling Smooth Angle Changes in Ultrasound Simulation
241

Frame18 CW_SSIM: 0.8223
Frame44 CW_SSIM: 0.8213 Frame29 CW_SSIM: 0.8180
Frame28 CW_SSIM: 0.8177
Frame23 CW_SSIM: 0.8172
Frame34 CW_SSIM: 0.8165 Frame26 CW_SSIM: 0.8160
Frame37 CW_SSIM: 0.8159
Source Frame
Figure 10: The highest CW-SSIM values compared to the source frame (angle prior to transition) at the +10°angle of the
abdomen.
shows the structure on a similar position of the X-axis
to allow a smooth change.
Figure 10 shows the 8 frames in the target angle
with the highest CW-SSIM values compared to the
source frame.
The frames with the smallest change in the
+10°degree step of the kidney are all from a similar
similarity range. Structural similarity can be appro-
priate, but would need to be preprocessed (n × m pos-
sibilities in each of the two angular directions).
Another drawback analogous to the tracking prob-
lem is the lack of momentum. In the case of the respi-
ration curve, there are several similar CW-SSIM val-
ues at the time of inhalation or exhalation, which, un-
like optical flow, cannot be distinguished.
5 CONCLUSION
In this work, three systems were presented and eval-
uated for their suitability for smooth angle change in
ultrasound simulators. The calculation of the motion
profile using optical flow proved to be successful and
can be integrated into simulators. The angle transition
is expected to be synchronous in the abdomen as well
as with visibility of vessels and is preferable to pre-
vious synchronization based on respiratory and pulse
recordings at the time of acquisition, since both arti-
facts are taken into account.
For future work, the proposed method should be
evaluated based on explicit quality criteria and on
additional organs. Since ultrasound simulators are
rarely open source, it is difficult to directly compare
the proposed method with other approaches side by
side. Therefore, in the future, there should be ef-
forts to provide an open source ultrasound simula-
tor in which this method can then be applied along-
side others. In addition, it would be useful to publish
some recordings to generate a benchmark dataset for
synchronization of ultrasound recordings. It should
also be investigated whether the motion profiles can
be useful for diagnostic purposes besides estimating
heart rate and respiratory rate.
REFERENCES
Bergen, J. R., Burt, P. J., Hingorani, R., and Peleg, S.
(1990). Computing two motions from three frames.
In International Conference on Computer Vision, vol-
ume 90, pages 27–32.
Blum, T., Rieger, A., Navab, N., Friess, H., and Martignoni,
M. (2013). A review of computer-based simulators for
ultrasound training. Simulation in Healthcare, 8(2).
Bolme, D. S., Beveridge, J. R., Draper, B. A., and Lui, Y. M.
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
242

(2010). Visual object tracking using adaptive correla-
tion filters. In 2010 IEEE computer society conference
on computer vision and pattern recognition (CVPR),
pages 2544–2550. IEEE.
Boukerroui, D., Noble, J. A., and Brady, M. (2003). Veloc-
ity estimation in ultrasound images: A block match-
ing approach. In Biennial International Conference
on Information Processing in Medical Imaging, pages
586–598. Springer.
Bracewell, R. (1978). The Fourier Transform and its Appli-
cations. McGraw-Hill Kogakusha, Ltd., Tokyo, sec-
ond edition.
Bradski, G. (2000). The opencv library. Dr. Dobb’s Journal
of Software Tools, 25:120–125.
Horn, B. K. and Schunck, B. G. (1981). Determining op-
tical flow. In Techniques and Applications of Image
Understanding, volume 281, pages 319–331. Interna-
tional Society for Optics and Photonics.
Ishii, I., Taniguchi, T., Yamamoto, K., and Takaki, T.
(2011). High-frame-rate optical flow system. IEEE
Transactions on Circuits and Systems for Video Tech-
nology, 22(1):105–112.
Kearney, J. K., Thompson, W. B., and Boley, D. L. (1987).
Optical flow estimation: An error analysis of gradient-
based methods with local optimization. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
PAMI-9(2):229–244.
Lawton, D. T. (1983). Processing translational motion se-
quences. Computer Vision, Graphics, and Image Pro-
cessing, 22(1):116–144.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In Proceedings of the 7th International Joint
Conference on Artificial Intelligence - Volume 2, IJ-
CAI’81, page 674–679, San Francisco, CA, USA.
Morgan Kaufmann Publishers Inc.
Luke
ˇ
zi
ˇ
c, A., Voj
´
ı
ˇ
r, T.,
ˇ
Cehovin Zajc, L., Matas, J., and
Kristan, M. (2018). Discriminative correlation filter
tracker with channel and spatial reliability. Interna-
tional Journal of Computer Vision, 126(7):671–688.
Matej, K. et al. (2016). The visual object tracking vot2016
challenge results. In European Conference on Com-
puter Vision (ECCV) Workshops.
Ourahmoune, A., Larabi, S., and Hamitouche-Djabou, C.
(2012). A survey of echographic simulators. In Gi-
amberardino, P. D., Iacoviello, D., Tavares, J. M.
R. S., and Jorge, R. M. N., editors, Computational
Modelling of Objects Represented in Images - Fun-
damentals, Methods and Applications III, Third Inter-
national Symposium, CompIMAGE 2012, Rome, Italy,
September 5-7, 2012, pages 273–276. CRC Press.
Pan, J. and Tompkins, W. J. (1985). A real-time qrs de-
tection algorithm. IEEE transactions on biomedical
engineering, BME-32(3):230–236.
Puybareau, E., Talbot, H., and L
´
eonard, M. (2015). Auto-
mated heart rate estimation in fish embryo. In 2015
International Conference on Image Processing The-
ory, Tools and Applications (IPTA), pages 379–384.
IEEE.
Roffo, G., Kristan, M., Matas, J., Felsberg, M., Pfugfelder,
R., Cehovin, L., Vojjir, T., Hager, G., Melzi, S., and
Fernandez, G. (2016). The visual object tracking
vot2016 challenge results. In Proceedings of the IEEE
European Conference on Computer Vision Workshops
(ECCV), Amsterdam, The Netherlands, pages 8–16.
Sampat, M. P., Wang, Z., Gupta, S., Bovik, A. C., and
Markey, M. K. (2009). Complex wavelet structural
similarity: A new image similarity index. IEEE trans-
actions on image processing, 18(11):2385–2401.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE transactions on
image processing, 13(4):600–612.
Wu, Y., Lim, J., and Yang, M. (2015). Object tracking
benchmark. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 37(9):1834–1848.
Xu, K., G
´
abor Csap
´
o, T., Roussel, P., and Denby, B. (2016).
A comparative study on the contour tracking algo-
rithms in ultrasound tongue images with automatic re-
initialization. The Journal of the Acoustical Society of
America, 139(5):EL154–EL160.
Heart Rate Estimation based on Optical Flow: Enabling Smooth Angle Changes in Ultrasound Simulation
243
