
NEMA: 6-DoF Pose Estimation Dataset for Deep Learning
Philippe P
´
erez de San Roman
1,2
, Pascal Desbarats
1
, Jean-Philippe Domenger
1
and Axel Buendia
3,4
1
Univ. Bordeaux, CNRS, Bordeaux INP, LaBRI, UMR 5800, F-33400 Talence, France
2
ITECA, 264 Rue Fontchaudiere, 16000 Angoul
ˆ
eme, France
3
CNAM-CEDRIC Paris, 292 Rue Saint Martin, 75 003 Paris, France
4
SpirOps, 8 Passage de la Bonne Graine, 75011, Paris, France
jean-philippe.domenger@u-bordeaux.fr, axel.buendia@cnam.fr
Keywords:
Deep Learning, 6-DOF Pose Estimation, 3D Detection, Dataset, RGB-D.
Abstract:
Maintenance is inevitable, time-consuming, expensive, and risky to production and maintenance operators.
Porting maintenance support applications to mixed reality (MR) headsets would ease operations. To function,
the application needs to anchor 3D graphics onto real objects, i.e. locate and track real-world objects in three
dimensions. This task is known in the computer vision community as Six Degree of Freedom Pose Estimation
(6-Dof) and is best solved using Convolutional Neural Networks (CNNs). Training them required numerous
examples, but acquiring real labeled images for 6-DoF pose estimation is a challenge on its own. In this article,
we propose first a thorough review of existing non-synthetic datasets for 6-DoF pose estimations. This allows
identifying several reasons why synthetic training data has been favored over real training data. Nothing can
replace real images. We show next that it is possible to overcome the limitations faced by previous datasets by
presenting a new methodology for labeled images acquisition. And finally, we present a new dataset named
NEMA that allows deep learning methods to be trained without the need for synthetic data.
1 INTRODUCTION
Equipment used in manufacturing plants need main-
tenance. They include wearing parts that have to be
replaced periodically. They can also fail in which
case the cause must be diagnosed and actions must
be taken to repair them. Maintenance has increased
since production became more and more automated.
Guides are provided by Original Equipment Manufac-
turer (OEM) in order to ease maintenance and repairs.
These guides usually come in paper form, spanning
from a single sheet to several binders, or digital doc-
uments. These documents are unpractical for several
reasons: • Operators have to search for the solution to
their problems using index tables. • They have to un-
derstand the written actions and the drawn schemat-
ics explaining how to solve the problems. • Any in-
formation has to be pinpoint on the actual machine.
Thus operators waste time carefully going through
these documents, understanding them, and applying
the solution. If they don’t, they risk mistakes that
could cause more damage, wasted time, money or
worse might injure them. Moreover, adding feedback
and knowledge gained over time to those documents
means having to reprint them. That’s why software
solutions have been implemented to solve the above
mentioned issues. These softwares include a compre-
hensive 3D interactive view that helps understanding
and locating the problem and animations detailing the
actions and processes to solve the problem. They also
contain chats with co-workers, internal experts, OEM
support team and AI agents that help diagnose the
problem and highlight the best solutions. These soft-
wares can be expanded by the developers or the users
to include better diagnostics and solutions. But even
with such a software, operators have to switch from
working on the actual problem and application. Thus
some of the above mentioned challenges remain true.
They still have to be careful to correctly understand
instructions. Interaction with a laptop, tablette or
smartphone is as problematic as interacting with pa-
per documents while working. Especially with indi-
vidual protective equipment such as gloves and safety
glasses. With the release of the Microsoft Hololens 2
professionals have an ”on the shelf” solution to these
problems. The headset provides a heads up display
placed directly in the line of sight of the user. Holo-
grams can be displayed in three dimensions in the en-
682
Pérez de San Roman, P., Desbarats, P., Domenger, J. and Buendia, A.
NEMA: 6-DoF Pose Estimation Dataset for Deep Learning.
DOI: 10.5220/0010913200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
682-690
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Table 1: Datasets comparison.
Dataset
Linemod
Occluded
T-Less (test)
YCB Video (test)
NEMA (ours)
(a) Depth errors.
µ(δ
d
) ± σ(δ
d
) µ(|δ
d
|) ± σ(|δ
d
|) Outliers
1.49 ± 07.75 mm 5.07 ± 6.05 mm 7.30 %
3.27 ± 07.52 mm 5.54 ± 6.05 mm 12.15 %
3.02 ± 12.15 mm 8.97 ± 8.74 mm 7.74 %
1.11 ± 05.09 mm 2.80 ± 4.39 mm 20.60 %
1.09 ± 03.05 mm 2.24 ± 2.61 mm 10.37 %
(b) Visibilities.
µ(v) ± σ(v) min(v) max(v)
96.47 ± 03.68 % 56.72 % 100 %
79.31 ± 24.23 % 0.05 % 100 %
83.06 ± 26.09 % 0 % 100 %
89.19 ± 15.65 % 7.54 % 100 %
62.72 ± 23.80 % 32.33 % 98.44 %
vironment without occulting what the user sees. An
eye tracker, gesture and voice recognition allow for
natural interactions with the visuals. But the software
can only work correctly if the 6-DoF pose estimation
module is reliable enough. This task, known as 6-
DoF pose estimation, is not a solved problem, particu-
larly when challenging factors such as occlusions and
changing lights come into play. Furthermore when
complex objects common in industrial equipment are
considered: textures less, metallic, transparent, sym-
metric or ambiguous. State of the art 6-DoF pose es-
timation methods are using CNNs. They require nu-
merous training examples consisting of an image, the
3D euler angles and the translation vector for each ob-
ject present in it (3+3 scalar values thus the name 6-
DoF). Models and camera intrinsic parameters must
be known by the application or estimated from the
images beforehand. Not many datasets provide re-
searchers and developers with such data. Recently
photorealistic render softwares made it possible to
train CNNs using synthetic images. The quality of
renderings allows to train networks that can then gen-
eralise to real situations in production. But validation
is also performed on real images to ensure robustness
of the results in real situations.
Summary
In this article we focus on the data rather than the
methods for 6-DoF pose estimation. In the first sec-
tion, we study existing datasets, trying to identify
their limitations and what in the acquisition setup was
the cause. Next we propose our first contribution
which is a new protocol to capture 6-DoF pose es-
timation datasets. This section includes details about
the hardware used and how to build it yourself. The
third and final section presents the new dataset that we
recorded called NEMA-22 in comparison to previous
ones.
2 EXISTING DATASETS
Designing robust and economic networks for 6-DoF
pose estimation is key to enabling mixed reality ap-
plications to work. The ingenuity that goes into label
Figure 1: Sample image of the Linemod dataset.
expression, network architecture design, and training
procedures are tremendous. But it is even more chal-
lenging if the data needed for training and testing are
insufficient or not reliable.
In this section, we review existing non-synthetic
datasets for 6-DoF pose estimation. We will present
these datasets, along with their setup and protocol.
Then we will look at the objects they chose and de-
tail image statistics to outline the challenges of these
datasets. We will look into any existing semantic gap
between training and test/validation in terms of ob-
ject visibility and object appearance. These can be
addressed using data augmentation to some extent.
Point of view (i.e., pose space) could also vary be-
tween training and testing images, which is difficult to
bridge using image augmentation as the object’s ap-
pearance changes with them. And of course, we will
look at label quality as any outlier that contributes to
training can destabilize it. Our main objective is to
assert if these datasets are suited for 6 DoF pose es-
timation CNNs, identify what solution they offer to
speed acquisition of the data while preserving the ac-
curacy of the labels, and how we can improve upon
them.
2.1 Linemod
History and Information. Linemod was published
in 2012 by Stefan Hinterstoißer, Vincent Lepetit, Slo-
bodan Ilic, Stefan Holzer, Gary Bradski, Kurt Kono-
lige and Nassir Navab (Hinterstoisser et al., 2013). It
was recorded to illustrate and validate their work on
6-DoF pose estimation also called Linemod (Hinter-
stoisser et al., 2011). Data are available on Stefan
Hinterstoißer’s academic web page. Linemod is a col-
lection of 15 sequences of roughly 1200 images, one
for every object. In total the dataset contains 19 273
frames with the object in the center labeled. A sample
image is presented in figure 1.
NEMA: 6-DoF Pose Estimation Dataset for Deep Learning
683

Acquisition. The authors used a Kinect Gen 1 to
capture RGB and registered depth maps at 480p. One
object is placed at the center of a planar board covered
with calibration markers on its peripheral (Garrido-
Jurado et al., 2014). The markers are used to robustly
estimate the pose of the object. The recording was di-
vided into two steps: 1. To reconstruct the 3D model
of an object, it is placed alone on the board so that is it
completely visible. An untold number of pictures are
taken and using a voxel-based method, pixels are re-
projected to the model space. Finally, the voxels are
converted to points and re-meshed. 2. To record the
validation sequences other objects are added around
the labeled object to create occlusions. These are not
labeled and change location between frames or leave
the camera field of view.
Statistics and Quality. The authors managed to ac-
quire evenly distributed points of view as we can see
in Figure 3b. This type of pose space is advanta-
geous because it can be split in training/test either
by selecting spaced-out points of view carefully, or
randomly, without impacting performances (Rad and
Lepetit, 2017). As for where the objects appear in
the image plane, there is a central bias as Figure 3a
shows. Moreover, all the foreground objects are in-
side the image boundaries.
To measure occlusions for their dataset, we com-
puted visibility by dividing the number of visible pix-
els by the number of pixels if the object was the
only one on-screen. The average visibility is 96.47 ±
3.68 %. Minimum is 56.72 % and the maximum is
100% thus objects are most visible. But because some
background objects can come in front of the fore-
ground object, and because they are not labeled, they
create occlusions that we could not take into account
in these statistics.
To evaluate the quality of the pose labels we com-
puted the mean pixel-to-pixel depth errors between
picture depth maps and depth maps rendered at the
ground truth pose as proposed by (Hoda
ˇ
n et al., 2017).
Pixels for which the difference is greater than 50 mm
are attributed to depth sensor inaccuracies and are
not taken into account. The overall mean error is
1.49 mm and the mean absolute error is 5.07 mm with
7.3 % outliers. As we will see later compared to other
datasets this error is small thanks to calibration mark-
ers (see table 1).
About the reconstructed 3D models. The voxel-
based reconstruction method worked great for simple
objects (Ape, Duck, Cat) but others have holes or re-
meshing errors (Bowl, Cup, Lamp). This harms seg-
mentation labels quality that impacts the image pre-
processing pipeline. It also affects the error compu-
Figure 2: Sample image of the Occluded dataset.
tation by decreasing the number of considered pixels.
Moreover, texts such as the ”Bosh” logo on the driller
are not reconstructed at all. Furthermore, any renders
of these objects will have poor fidelity.
Usage and Limitations. Linemod, the pose estima-
tion method, was based on templates computed using
renderings and only relies on 3D models for training.
Thus, the dataset was never intended for training, and
surely not for training a 6-DoF pose estimation deep
model. When repurposing it to such applications, one
is faced with several problems: • There are not enough
images / labeled instances. • The calibration markers
could bias training. • Unlabeled objects create un-
traceable occlusions. • Reconstructed 3D models are
of low quality.
To overcome these problems, two solutions have
been proposed: 1. It is possible to extract the fore-
ground of the object to get rid of calibration markers
and other objects, and use random backgrounds (Rad
and Lepetit, 2017; Xiang et al., 2017; Peng et al.,
2019; Tekin et al., 2017). But this process creates
highly unrealistic images where the object seems to
float mid-air. Relations, scales, and perspectives are
completely false because background and foreground
are not pictured using the same camera nor at the
same pose. As mentioned, other unlabeled objects can
also find their way into the foreground and destabilize
training. 2. It is also possible to use rendering to train
the model (Xiang et al., 2017; Hoda
ˇ
n et al., 2020).
But as mentioned, the quality of the models makes it
difficult to create photo-realistic images.
2.2 Linemod Occluded
History and Information. Two years after the re-
lease of Linemod, Eric Brachmann, Alexander Krull,
Frank Michel, Stefan Gumhold, Jamie Shotton, and
Carsten Rother contributed annotations for more ob-
jects visible in the ”Bench Vise Blue” sequence
(Brachmann et al., 2014). With the added labels the
dataset is known as ”Occluded”. Data are hosted on
the website of the Heidelberg university but a newer
version with verified labels is available as part of the
BOP benchmark. Figure 2 shows one image of this
sequence with the added labels.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
684
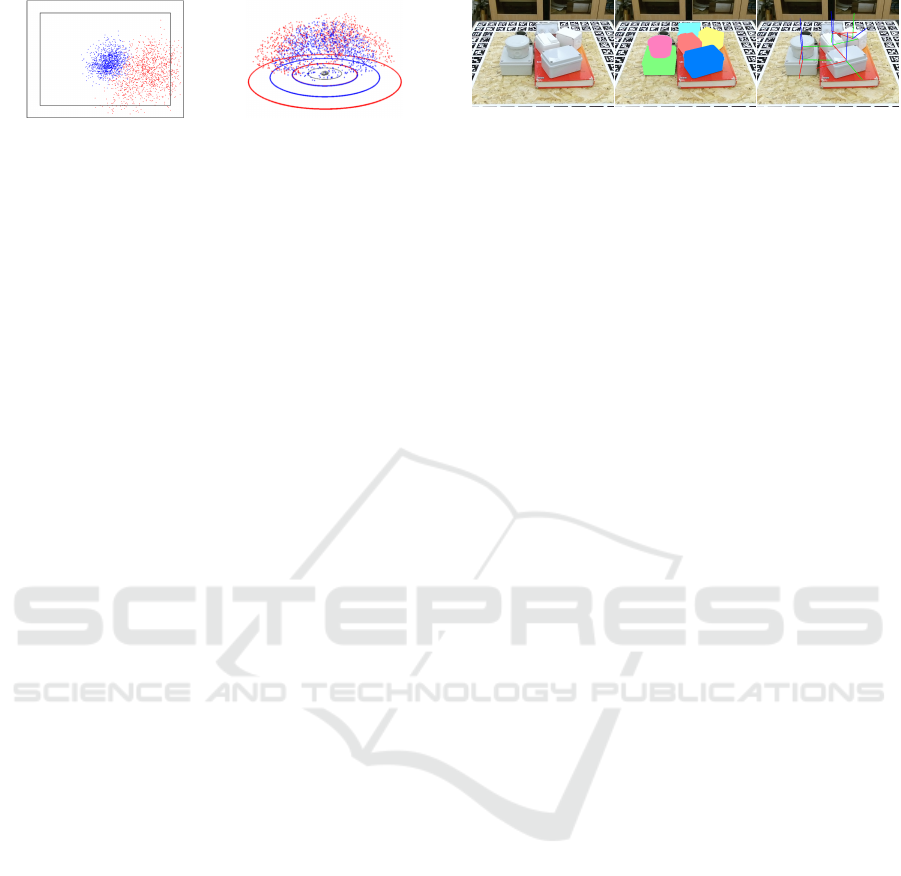
(a) (b)
Figure 3: Eggbox on-screen locations (a) and points of
views (b). Blue: Linemod, Red: Occluded.
Acquisition. Details for this dataset are found in the
supplementary materials of (Brachmann et al., 2014).
The process was semi-automatic. Ground truth la-
bels are defined manually in the first frame. Then the
transformation that moves from one frame to the next
following the camera motion is computed and applied
to the labels. If the pose of an object appears erro-
neous in one frame it is redefined manually and the
process restarts. Finally, all poses are refined using
the iterative closest point algorithm (Besl and McKay,
1992).
Statistics and Quality. The goal of the authors was
to get occlusions to benchmark against them. The
Duck is once occluded up to 99.95 % (0.05 % of vis-
ibility). Overall average visibility is 79.31 %, but
with a standard deviation of 24.23 %. Compared to
Linemod (96.47 ± 3.68 %) the objects are signifi-
cantly more occluded. It is also worth mentioning that
the ”Egg Box” and ”Glue” ”objects are sometimes la-
beled but are outside of the camera field of view. The
pose space of the added labels is similar in distribu-
tion to the one of Linemod as we can see in Figure
3b. But the distance to the objects can be greater. For
example, in Linemod, the ”Egg Box” is viewed at dis-
tances ranging from 0.67 m to 1.10 m. In Occluded it
is viewed at distances ranging from 0.66 m to 1.50 m.
So 1 cm closer and up to 40 cm further! With the oc-
cluded labels, the central image bias is gone as we can
see in Figure 3a. This is because some of the objects
are on the edge of the table. Thus, the camera does
not look at them and sometimes does not see them at
all. As we mentioned earlier, some objects were oc-
cluding the foreground objects of Linemod but there
were no labels. So, we had no idea these occlusions
were taking place. The labels of Occluded help with
this problem. If we look at the ”Bench Vise” the num-
ber of outliers is reduced from 7.51% to 6.50% while
the average absolute depth error remains close. This
proves that the added labels help identify and reduce
untraceable occlusions.
Usage and Limitations. Occluded build upon
Linemod by adding occlusions. By doing so its
Figure 4: Sample image of the T-Less dataset.
authors solved the issues of untraceable occlusions
that affected the quality of labels. They also im-
proved upon the number of labeled instances. Finally,
they created a domain adaptation challenge between
the pose space of Linemod and Occluded. Just as
Linemod, this dataset is intended for template-based
methods that are trained using renders and is only in-
tended for testing. Thus, when training a deep model
for 6-DoF pose estimation 3 challenges remain, plus
the added challenges: 1. There are not enough images
/ labeled instances. 2. The calibration markers could
bias training. 3. Reconstructed 3D models are of low
quality. 4. There are extensive occlusions. 5. There
is a domain gap between Linemod / Occluded. Op-
tions to deal with these problems are the same as
for Linemod: 1. Use synthetic training images whose
quality is limited by the quality of the 3D models.
2. Use extensive image augmentation that end-up cre-
ating highly unrealistic images. Because training is
usually done on the Linemod images and testing on
the Occluded images. Augmentation must address
both the occlusions and the pose domain adaptation
challenges.
2.3 Texture Less (T-Less)
History and Information. T-LESS (Hoda
ˇ
n et al.,
2017) was designed and pictured by Tom
´
a
ˇ
s Hoda
ˇ
n,
Pavel Haluza,
ˇ
St
ˇ
ep
´
an Obdr
ˇ
z
´
alek, Ji
ˇ
r
´
ı Matas, Manolis
Lourakis, et Xenophon Zabulis. The dataset focuses
on 30 industry-relevant challenging objects with no
distinct colors, shapes, or symmetries. The 30 train-
ing scenes have around 1 200 images and the test
scenes around 500. The dataset can be downloaded
on the official web page or as part of the BOP chal-
lenge.
Acquisition. Three cameras are used to acquire the
dataset: a Microsoft Kinect V2 (540p), a Prime-
sense Carmine 1.09 (540p) and a Canon Ixus 950 IS
(1920p). 3D CAD models are provided in STL for-
mat with a very detailed mesh but are not parametric
CAD models. The authors used a turntable that al-
lows them to quickly capture images at different an-
gles. It is covered on the top and sides with calibration
markers to accurately retrieve the pose of objects on
it. The camera mount allows them to adjust the cam-
NEMA: 6-DoF Pose Estimation Dataset for Deep Learning
685

(a) (b)
Figure 5: Object 01 on-screen locations (a) and points of
views (b). Blue: training, Red: test.
era height and tilt. The recording is divided into two
steps: 1. Training images feature a single object over
a black background at the center of the turntable. Im-
ages are cropped to have the object in the center and
to remove any visible markers. 2. Test images feature
multiple objects over various table tops. Multiple ob-
jects are placed, some of which are unlabeled (books,
bowls). Then the mesh of the whole scene is recon-
structed, the 3D models are aligned to it to compute
their pose. Finally, a manual inspection of the labels
is performed, and if needed they are corrected manu-
ally.
Statistics and Quality. The points of view are lo-
cated in a sphere as we can see in figure 5b. Like
in Linemod the object is located in the middle of the
training images and similarly to Occluded the test ob-
ject appears anywhere in the test images as we can see
in figure 5a. Objects are viewed from further away in
the test images. For instance, ”Object 01” is seen
at distance ranging from 0.62 m to 0.66 m in training
and at distance ranging from 0.64 m to 0.93m for test-
ing. Visibility is assured in the training images, but
in the test images, it averages 83.06 ± 26.09 % and
can be null for many objects. Authors of the T-Less
were the first to evaluate the quality of the labels they
provided. They measured a 4.46mm average depth er-
ror. We measured 5.36mm for the training depth maps
and 3.02 mm for the test ones. The proportion of out-
liers that were excluded from computation is 5.46 %
for the training depth maps and 7.74 % for the test
ones. The use of a turntable with calibration mark-
ers, the solid camera rig, and the rigorous acquisition
protocol allowed the authors to create a dataset with
accurate labels.
Usage and Limitations. T-Less is intended for
methods that build templates and model distance to
the object as a scaling parameter. Thus, they do
not need training images at various distances, this is
why the training images are all shot at the same dis-
tance to the objects and feature a single object. The
test scenes are very different. They feature multiple
Figure 6: Sample image of the YCB Video dataset.
objects with occlusions. Thus, the pose space, dis-
tance to the objects, and on-screen location domains
are unlike. When training deep network for 6-DoF
pose estimation on T-Less the following challenges
apply: 1. There are not enough images / labeled in-
stances. 2. Objects are difficult (textureless, symmet-
ric). 3. Training images have a black background.
4. Large domain gap between training/test. Such dif-
ficulties are hard to overcome for deep models. Im-
age augmentation can solve some of them as exper-
iments on Linemod Occluded have proven (Rad and
Lepetit, 2017). Again, the resulting images are far
from realistic. But the added challenge of object ap-
pearance is difficult with these few images. This is
why deep models have struggled to solve T-Less using
only real images. The only viable solution on T-Less
is to use synthetic images for training (Pitteri et al.,
2019; Hoda
ˇ
n et al., 2020). The high-quality 3D mod-
els are well suited to create photo-realistic renders.
2.4 YCB Video
History and Information. Also in 2017, the YCB
Video was designed by Xiang Yu, Schmidt Tan-
ner, Narayanan Venkatraman, and Fox Dieter (Xiang
et al., 2017). It is the first dataset designed to accom-
modate the training and testing of 6-DoF pose estima-
tion deep networks. YCB Video can be downloaded
from the Pose CNN website but we used the BOP
challenge repository. It pictures 21 objects of the
YCB objects (Calli et al., 2017). Some objects have
challenging textureless appearances, other are identi-
cal to a scaling factor. Scale is ambiguous in 6-DoF
pose estimation that assumes rigid objects at constant
scale. They recorded 92 videos provided with pose
labels. In total the dataset contains 133 827 labeled
frames with aligned depth maps at 480p. A sample
im- age is displayed in Figure 6.
Acquisition. Authors wanted to avoid as much as
possible manual annotations which are a source for
errors, especially because labeling 3D poses is very
tricky from 2D images. They also wanted as many
images as possible to train a deep model. That is why
they decided to film scenes to obtain 30 images per
second. The pose of each object is aligned in the first
frame using a signed distance function (Osher and
Fedkiw, 2003): rendered depth is aligned to the depth
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
686

(a) (b)
Figure 7: Coffee Can on-screen locations (a) and points of
views (b). Blue: training, Red: test.
frame. When moving to the next frame the camera
motion is computed and propagated to the pose labels.
Statistics and Quality. Because the recording pro-
cess is so different from previous datasets, the pose
space is also unlike previous ones. The points of view
of the Coffee Can are displayed in figure 7b. Poses
are no longer evenly distributed but are rather densely
sampled along the path of the camera. The locations
where objects appear on-screen follow the same pat-
tern as we can see in figure 7a. There is no central bias
and many objects end up outside the image bound-
aries. Visibility ranges from 0% to 100% with an av-
erage of 86.17 ± 19.84 % in the training images. And
it ranges from 7.54 % to 100 % in the testing images
with an average of 89.19 ± 15.65 %. So the dataset
includes significant occlusions that are showcased in
the training images. The method used to annotate im-
ages automatically optimizes depth error in the depth
maps. So naturally, when we measure the error, it is
low: 1.11 ± 5.09 mm on average and 2.80 ± 4.39 mm
absolute average. But this optimization seems to have
failed on some images because we found 20.6 % of
outliers which is larger than other datasets (see table
1) and cannot be attributed only to depth sensor er-
rors.
Usage and Limitations. Because poses are not
sampled sparsely, the test sample cannot be selected
at random. Instead, some videos are used for training,
and others as test sequences. There are no calibra-
tion markers in the images so there is no need to erase
them. Because of how the dataset is recorded test-
ing points of view are far from the training ones. The
method described by the authors was able to general-
ize, achieving 75.9 % of accuracy. But later works
have shown that renderings that cover the ”miss-
ing” training poses helped better the result (Trem-
blay et al., 2018; Hoda
ˇ
n et al., 2020). Not relying on
calibration markers makes it possible to record video
thus speeding up acquisition. But the measured out-
liers proportion indicates that it comes at the cost of
label quality in some frames. The quality of the la-
bels has already been criticized by its authors (Xiang
et al., 2017) and by the authors of the BOP challenge
(Hoda
ˇ
n et al., 2020).
Critics
6-DoF pose estimation is a challenging task and
datasets should not contribute to more difficulties.
CNNs require more images to be trained compared
to template based methods. The only dataset in this
field providing a sufficient number of images is the
latest YCB Video dataset. But it contains images
with erroneous labels due to its recording and anno-
tation process. Older datasets, with better quality la-
bels, were meant for methods that used renderings of
the 3D models to build templates. Thus, they do not
contain the required number of images to train deep
CNN models. The images were not meant to be used
as training samples and contain visible markers that
must be erased to prevent biased results. But the rere-
sulting images are far from realistic. Because of these
reasons, the go-to solution is to use renders. While
their quality has improved, they have become cheap to
compute thanks to GPU and cheap to store thanks to
large hard drives and cloud storage. But can we trust
a deep CNN only trained on synthetic data in real-life
applications ? We believe a new dataset could learn
from the protocols of the existing ones and improve
upon their limitations.
3 NEMA-22 DATASET
In this section we present our new dataset called
NEMA. First we detail the hardware we chose and
why. Second we explain the protocol we followed to
record the dataset. Finally we showcase some images
and qualitive results of NEMA.
3.1 Hardware
To make a 6-DoF pose estimation any RGB-D camera
can work but they do not all offer the same quality and
ease of use. The objects considered need to provide
sufficient challenges in order to objectively evaluate
network performances. The table setup and other ac-
cessories will also greatly impact the protocol for la-
bel acquisition. In general hardware impacts the time
spent to record the dataset and the label quality.
This subsection details the motivation and con-
straints that guided our hardware choices.
Camera. Microsoft Azure ($400) were not avail-
able at the time of the dataset recording. So we de-
cided to use the Intel Realsense d435i ($329). It’s
NEMA: 6-DoF Pose Estimation Dataset for Deep Learning
687

Figure 8: Sample image of our NEMA dataset with segmentation and pose labels.
Figure 9: NEMA 17 motor used in our dataset. Left: real,
middle: 3D design, right, 3D printed.
equipped with a Full HD camera and two infrared
cameras with HD capabilities. We configured the
camera to deliver registered color images and depth-
maps at 720p using Intel’s Realsense Python SDK
(free). Our dataset consists of pictures, not vid
´
eos.
Objects. For the objects we had several constraints
in mind. • We wanted parametric CAD models that
allow for low-poly exports of meshes and parametric
loss expression. • We wanted an object composed of
several pieces that can be assembled together. • We
wanted our object to look like industrial ones: texture
less, metallic and symmetric. • Moreover we wanted
anyone to have access to our object, free of charge.
To prototype this we designed a simplified repre-
sentation of a NEMA 17 stepper motor. We only in-
cluded the outer parts: bottom, body, top and shaft.
Nonetheless, we sized our pieces to be accurate to
the NEMA ICS 16-2001 (Association, 2001). All the
drawings were done in Fusion 360 then 3D printed on
un Ultimaker 2+. Figure 9 presents a real NEMA 17,
our design and the printed result.
This way we end up with an object composed of
four pieces, with challenging appearance and shape
for which we have precise and parametric 3D CAD
models. We make this design freely available with
printing settings so people can 3D print them and re-
produce our results.
Turn Table. After studying the existing datasets we
found a board with calibration markers is the most re-
liable solution to acquire pose labels. Combined with
a turning table it becomes rapid to acquire a full 360
◦
Figure 10: Table with the camera and a sample scene setup.
or more set of pictures. We only have to take back-
ground pictures to mask the markers.
On-shelf turn-tables are expensive, do not include
markers, and are thick. Any height added by the turn-
table will give the impression in the masked image
that the objects are floating mid air. We also need to
swap in and out the turntable to picture background
images.
So we imagined a simple turntable that we could
also 3D print. The top of the board is the only thing
above the table and it’s as thin as paper. A stepper
motor (28BYJ-48) placed under the table rotates the
top and micro-switch enables homing to 0
◦
. We used
an Arduino Nano Every over serial USB to control the
board using Python programming. The 3D models for
the board, motor casing, the Arduino firmware sketch
and the python serial communication software are all
made available for free.
Table and Supports. The table has a plywood top.
Its legs and the camera support are made with mod-
ular aluminum tubing and a few homemade parts. It
gives us plenty of room to accommodate the scenes
with background objects. The plans, parts list, and
custom parts designs are made available for free.
3.2 Protocol
We chose to use markers to obtain accurate pose la-
bels. If background images are not recorded using the
same camera and point of view then the perspective
in the image will be incorrect. Thus we decided to
record them using the same camera at the same loca-
tion. Our protocol allows us to position the camera,
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
688

then record the background, and finally automatically
record a 360
◦
rotation of the turn-table. The steps are
detailed below.
Setup Camera. We record color images and
aligned depth maps at a resolution of 1280×720 pix-
els. We set the frame rate to the default 30 FPS but
we do not rely on it.
Setup ChArUco. We used an 8×8ChArUco board.
The cell size is set to 24 mm which is half the width
of the bottom of our object. This trick allows us to
precisely align the object with the center of the board.
We provide a scaled PDF with the ChArUco board
ready to print in the dataset.
Setup Scene. The dataset can contain many scene.
Sequences of a scene will display the same objects
with the same positions and orientation with respect
to the ChArUco board. When creating a new scene
our software allows us to preview the pose labels on
the video stream. Each object is added by providing
its 3D model. Then their pose can be manually set
using translation and Euler angles. Other unlabeled
objects can be added in the background but they must
not occlude the ChArUco board or the labeled objects
on it. The turn-table can be rotated freely to ensure
correct pose labels.
Setup Sequence. A sequence contains all the pic-
tures acquired by the camera at a given point of view.
This includes the pictures acquired when rotating the
turn-table and the background. When creating a se-
quence we first move the camera on its rig. We used
a measuring tape to move the camera 1 cm at a step
horizontally or vertically. We always tilt the camera
so that it looks at the center of the ChArUco board to
ensure central bias.
Background Image Acquisition. Once the camera
is placed we remove the foreground objects and the
ChArUco board and take the background picture.
Foreground Images Acquisition. We place back
the ChArUco board on the table and add back the
foreground objects. The same display as for the scene
setup allows us to realign precisely the pieces on the
board. Then we can set the rotation step between
two pictures to 0.5
◦
and hit record. The turn-table
will home iteself and start rotating. At each step a
foreground picture is taken, the pose of the ChArUco
board is estimated, the pose of the foreground objects
is computed and saved.
If for any reason the pose of the ChArUco board
cannot be estimated the recording stops. This is usu-
ally because the camera is too far out and markers can
not be detected. In that case we simply delete the se-
quence and move to the next one.
3.3 Statistics and Quality
Using the selected hardware and protocol we com-
pleted the recording of a complete scene composed
of 240 sequences. As we selected a step of 0.5
◦
for
the turntable each sequence is 720 images rich. This
brings the wall scene to 172 800 images. And in each
image 4 objects plus the charuco board are labeled.
This means that so far we have recorded 691 200 la-
beled object instances.
The points of views of each object are displayed in
figure 11. Just like in Linemod and TLESS we man-
aged to acquire evenly distributed points of views.
They can be split into a training and test set randomly.
Objects are occluded 62.72 % in average and 32.33 %
at most, which is reasonably low. We achieved central
bias as we can see in figure 12 and no object is out-
side the camera field of view. Visibility is presented in
Table 2. It ranges from 32.33% to 98.44% with an av-
erage of 62.72 ± 23.80%. Individual objects have rel-
atively constant visibility as the scene layout does not
change (their standard deviations are all lower than
5 %).
We not only computed the depth error on the fore-
ground objects but also on the ChArUco board. The
quality of the labels is better than the previous dataset
as we can see in table 1. The average depth error is
1.089 ± 3.048 mm and absolute average depth error
is 2.235 ± 2.606 mm. Most of the outliers are con-
tributed by the shaft: 30.078 % of outliers. This is
also visible in the sample depth map (figure 8). This
very thin gray object is not pictured by the depth sen-
sor. The bottom, body and ChArUco have very little
outliers (∼ 4 %) and depth error (∼ 3 mm).
4 CONCLUSION
In this article we first reviewed the existing datasets
for 6-DoF pose estimation. This review convinced us
that there is room for improvement. First the depth
cameras have improved both in terms of resolution
and image quality. Deep CNNs, especially full con-
volutional, can take advantage of larger image res-
olution. Second existing dataset either do not offer
enough images, or contain erroneous labels. This is
due to the protocol that was either not intended for
NEMA: 6-DoF Pose Estimation Dataset for Deep Learning
689

Table 2: NEMA-22 statistics.
Object(s)
Body
Bottom
Shaft
Top
Charuco
All
(a) Visibility.
min(v) max(v) µ(v) ± σ(v)
35.20% 60.76% 46.76 ± 04.35 %
35.26% 61.51% 48.33 ± 04.33 %
32.18% 41.19% 36.67 ± 01.09 %
95.38% 98.44% 96.77 ± 00.46 %
81.84% 87.87% 84.78 ± 01.36 %
32.33% 98.44% 62.72 ± 23.80 %
(a) Depth error.
µ(δ
d
) ± σ(δ
d
) µ(|δ
d
|) ± σ(|δ
d
|) Outliers
−2.275 ± 3.676 mm 3.108 ± 6.165 3.834 %
−0.671 ± 4.803 mm 2.686 ± 5.251 3.664 %
0.819 ± 1.836 mm 1.527 ± 1.487 30.078 %
1.143 ± 4.162 mm 3.163 ± 3.564 11.652 %
1.369 ± 2.595 mm 2.078 ± 2.189 2.628 %
1.089 ± 3.048 mm 2.235 ± 2.606 10.371 %
(a) Bottom (b) Body (c) Top (d) Shaft
Figure 11: NEMA on-screen locations.
(a) Bottom (b) Body (c) Top (d) Shaft
Figure 12: NEMA points of views.
deep models, or that relied on global optimization to
save time that can fail for some images.
Our protocol factories the manual steps and allow
for fast and robust image + label semi-automatic ac-
quisition. It can be applied to any camera. Other hard-
ware pieces are mostly 3D printed. We make the 3D
CAD models, printing settings, software to record the
dataset and the complete dataset available to anyone
for free. We hope people will contribute to the dataset
our create their own using our tools and protocol.
REFERENCES
Association, N. E. M. (2001). Nema ics 16, industrial
control and systems, motion/position, control motors,
controls and feedback devices. Standard, National
Electrical Manufacturers Association, 1300 N. 17th
street, Rosslyn, Virginia 22209.
Besl, P. and McKay, N. D. (1992). A method for registration
of 3-d shapes. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 14(2):239–256.
Brachmann, E., Krull, A., Michel, F., Gumhold, S., Shotton,
J., and Rother, C. (2014). Learning 6d object pose es-
timation using 3d object coordinates. In Fleet, D., Pa-
jdla, T., Schiele, B., and Tuytelaars, T., editors, Com-
puter Vision – ECCV 2014, pages 536–551, Cham.
Springer International Publishing.
Calli, B., Singh, A., Bruce, J., Walsman, A., Konolige, K.,
Srinivasa, S., Abbeel, P., and Dollar, A. M. (2017).
Yale-cmu-berkeley dataset for robotic manipulation
research. The International Journal of Robotics Re-
search, 36(3):261–268.
Garrido-Jurado, S., Mu
˜
noz-Salinas, R., Madrid-Cuevas,
F. J., and Mar
´
ın-Jim
´
enez, M. J. (2014). Auto-
matic generation and detection of highly reliable fidu-
cial markers under occlusion. Pattern Recognition,
47(6):2280–2292.
Hinterstoisser, S., Holzer, S., Cagniart, C., Ilic, S., Kono-
lige, K., Navab, N., and Lepetit, V. (2011). Multi-
modal templates for real-time detection of texture-less
objects in heavily cluttered scenes. pages 858–865.
Hinterstoisser, S., Lepetit, V., Ilic, S., Holzer, S., Bradski,
G., Konolige, K., and Navab, N. (2013). Model based
training, detection and pose estimation of texture-less
3d objects in heavily cluttered scenes. In Lee, K. M.,
Matsushita, Y., Rehg, J. M., and Hu, Z., editors, Com-
puter Vision – ACCV 2012, pages 548–562, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Hoda
ˇ
n, T., Haluza, P., Obdr
ˇ
z
´
alek,
ˇ
S., Matas, J., Lourakis,
M., and Zabulis, X. (2017). T-LESS: An RGB-D
dataset for 6D pose estimation of texture-less objects.
IEEE Winter Conference on Applications of Computer
Vision (WACV).
Hoda
ˇ
n, T., Sundermeyer, M., Drost, B., Labb
´
e, Y., Brach-
mann, E., Michel, F., Rother, C., and Matas, J. (2020).
BOP challenge 2020 on 6D object localization. Euro-
pean Conference on Computer Vision Workshops (EC-
CVW).
Osher, S. and Fedkiw, R. (2003). Signed Distance Func-
tions, pages 17–22. Springer New York, New York,
NY.
Peng, S., Liu, Y., Huang, Q., Zhou, X., and Bao, H. (2019).
Pvnet: Pixel-wise voting network for 6dof pose esti-
mation. In CVPR.
Pitteri, G., Ramamonjisoa, M., Ilic, S., and Lepetit, V.
(2019). On object symmetries and 6d pose estimation
from images. International Conference on 3D Vision.
Rad, M. and Lepetit, V. (2017). BB8: A scalable, accurate,
robust to partial occlusion method for predicting the
3d poses of challenging objects without using depth.
CoRR, abs/1703.10896.
Tekin, B., Sinha, S. N., and Fua, P. (2017). Real-time
seamless single shot 6d object pose prediction. CoRR,
abs/1711.08848.
Tremblay, J., To, T., and Birchfield, S. (2018). Falling
things: A synthetic dataset for 3d object detection and
pose estimation. CoRR, abs/1804.06534.
Xiang, Y., Schmidt, T., Narayanan, V., and Fox, D. (2017).
Posecnn: A convolutional neural network for 6d
object pose estimation in cluttered scenes. CoRR,
abs/1711.00199.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
690
