
A Practical Wearable Sensor-based Human Activity Recognition
Research Pipeline
Hui Liu
a
, Yale Hartmann
b
and Tanja Schultz
c
Cognitive Systems Lab, University of Bremen, Bremen, Germany
Keywords:
Human Activity Recognition, Wearable Healthcare, Biodevices, Biosignals, Segmentation, Annotation,
Feature Extraction, Digital Signal Proccesing, Machine Learning.
Abstract:
Many researchers devote themselves to studying various aspects of Human Activity Recognition (HAR), such
as data analysis, signal processing, feature extraction, and machine learning models. In response to the fact
that few documents summarize and form intuitive paradigms for the entire HAR research pipeline, based on
the purpose of sharing our years of research experience, we propose a practical, comprehensive HAR research
pipeline, called HAR-Pipeline, composed of nine research aspects, aiming to reflect the overall perspective
of HAR research topics to the greatest extent and indicate the sequence and relationship between the tasks.
Supplemented by the outcomes of our actual series of studies as examples, we demonstrate the proposed
pipeline’s rationality and feasibility.
1 INTRODUCTION
In this digital age, Human Activity Recognition
(HAR) has been playing an increasingly important
role in almost all aspects of life. HAR is often as-
sociated to the process of determining and naming
human activities using sensory observations (Wein-
land et al., 2011). The recognition of human activities
has been approached in two different ways, namely
using external and wearable (internal) sensors (Lara
and Labrador, 2012). External sensing technologies
require the devices fixed in predetermined points of
interest, so the inference of activities entirely depends
on the voluntary interaction of the users with the sen-
sors, while the devices for internal sensing are at-
tached to the user, which leads to the research topic
of wearable biosignal-based HAR. Whether based on
external or internal sensing, HAR research involves
various topics, such as hardware (equipment, sen-
sor design, sensing technology, among others), soft-
ware (acquisition, data visualization, signal process-
ing, among others), and Machine Learning (ML) ap-
proaches (feature study, modeling, training, recogni-
tion, evaluation, among others). However, few docu-
ments summarize and form a paradigm for the entire
a
https://orcid.org/0000-0002-6850-9570
b
https://orcid.org/0000-0002-1003-0188
c
https://orcid.org/0000-0002-9809-7028
framework of HAR research, which may be due to
the fact that researchers usually focus on the research
in one or several fields of HAR, such as modeling
optimization, automatic segmentation, feature selec-
tion, and application scenarios, rather than the over-
all HAR process. Nevertheless, there are still articles
trying to review the tasks in HAR research compre-
hensively. For example, (Bulling et al., 2014) put five
blocks for body-worn inertial-sensor-based HAR into
a chain, called Activity Recognition Chain (ARC),
as the HAR research guideline, comprising stages for
data acquisition, signal preprocessing and segmenta-
tion, feature extraction and selection, training, and
classification. (Ke et al., 2013) reviewed video-based
HAR and pointed out similar sub-tasks, but for video,
the approaches and algorithms applied in the tasks are
different from those for the biosignal-based research.
In our years of research, we have found that the
chain model needs to be supplemented to a certain
extent. In other words, the chain model is not neces-
sarily a general research process that solves all poten-
tial problems. In fact, the overall research of HAR
is not linear, of which there are many cycles and
backtracking according to purposes and actual condi-
tions. If researchers divide their research phases in the
early stage to follow close to the chain consistency, it
is very likely that when they discover insufficient or
faulty early results in the later stage, they will find it
challenging to rewind to the steps exactly.
Liu, H., Hartmann, Y. and Schultz, T.
A Practical Wearable Sensor-based Human Activity Recognition Research Pipeline.
DOI: 10.5220/0010937000003123
In Proceedings of the 15th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2022) - Volume 5: HEALTHINF, pages 847-856
ISBN: 978-989-758-552-4; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
847
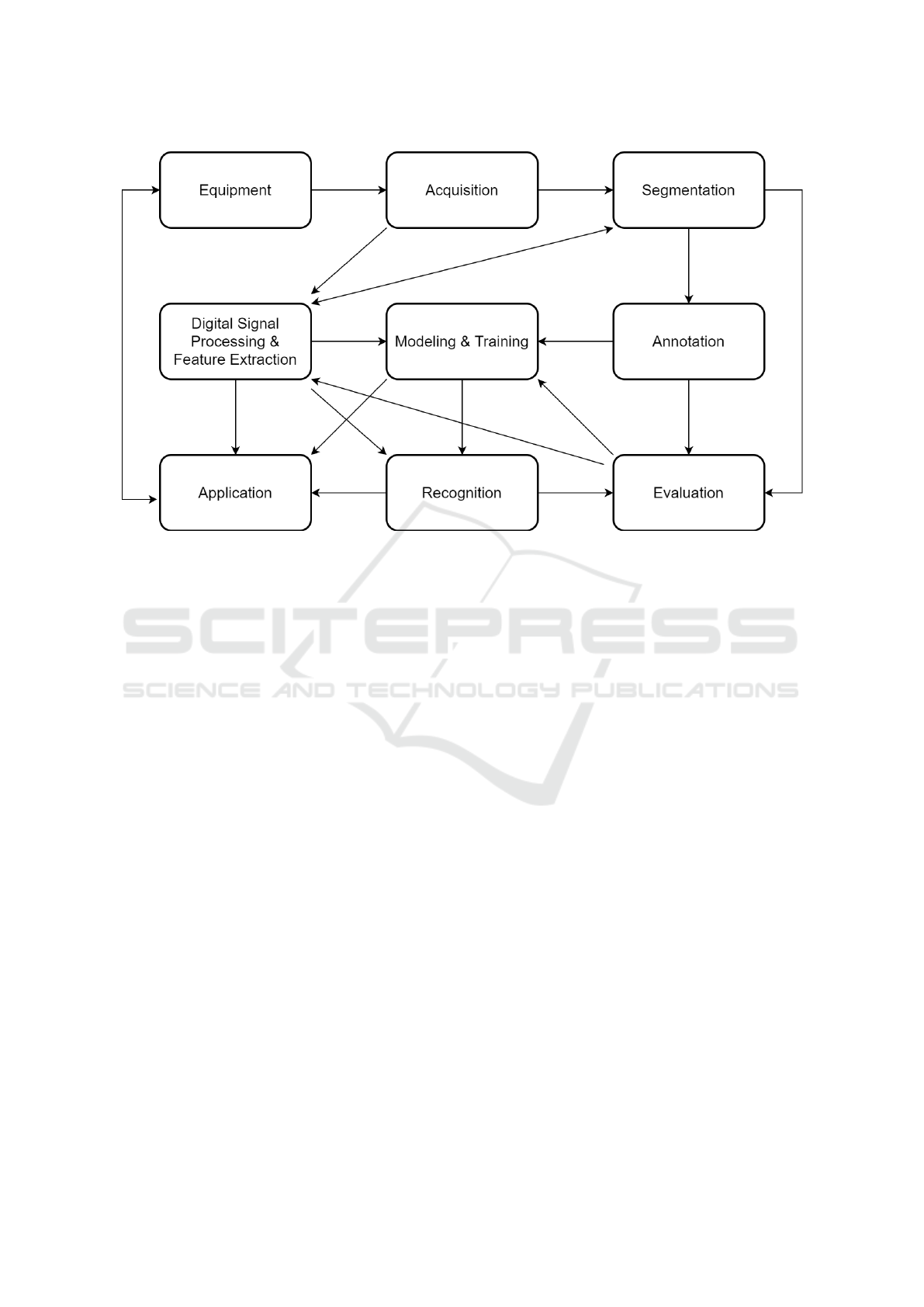
Figure 1: The proposed HAR-Pipeline for HAR research.
Researchers who are just entering the HAR field
would be willing to understand how to construct a
research plan for the research object at hand, while
researchers who have already gone deep into certain
aspects of HAR may also need to clearly understand
what other tasks can be studied to improve their re-
search results. Therefore, it is helpful to summarize
and propose a detailed research pipeline for guidance.
The HAR-Pipeline proposed in this paper is based on
our years of research experience, whose completeness
and operability have been evidenced through the out-
comes of our actual series of studies.
Some following subsections are revised and im-
proved based on the relevant chapters in the first au-
thor’s doctoral thesis (Liu, 2021). Therefore, the
description and examples are mainly related to the
biosignal-based HAR of wearable sensing. From
a macro perspective, we believe that the proposed
pipeline also fits video-based HAR research to a large
extent. For video-based HAR, several sub-tasks in
the HAR-Pipeline need to be further supplemented.
For example, besides classifying what activity is be-
ing done, video-based HAR systems sometimes need
to recognize where the activity happens in the video
sequence. However, such compensations do not affect
the flow sheet of the nine topics in the HAR-Pipeline.
Although the pipeline outlines an overall HAR re-
search perspective, the exploration of each link re-
quires customized definitions and plans according to
research objects and goals.
2 PIPELINE
Figure 1 illustrates the proposed HAR-Pipeline of
end-to-end HAR research. The arrows between each
component in Figure 1 indicate the processing order
in the study. These nine components are essential and
indispensable for the research of a complete end-to-
end HAR system. The number of critical components
will be reduced if the research aims at only one or sev-
eral of these topics, but we can clearly understand the
pre-stages and related topics linked to the target tasks
according to the pipeline. The following subsections
will expand on all components of the HAR-Pipeline.
2.1 Equipment: Devices and Sensors
Selecting the appropriate appliance for signal acqui-
sition is essential during research preparation. For
different sensing technologies, such as video-based
sensing, biosensor-based sensing, smart home, among
others, the related equipment involved is quite differ-
ent, but each has a specific range of options. There
are many considerations for choosing the applicable
equipment, such as:
• Application scenarios
• Research requirements
• Signal transmission technologies
• Site situations
WHC 2022 - Special Session on Wearable HealthCare
848

• Financial conditions
For biosignal-based HAR, almost all kinds of
biosignal acquisition equipment are capable of par-
ticular HAR tasks, depending on different research
purposes. As stated in Section 2.4, choosing equip-
ment based on application consideration is a good
starting point. The double-headed arrow between
the “Equipment” and the ”Application” blocks in the
pipeline stands for this relationship. For example,
when the application scenario of the HAR research
is daily life assistance or interactive entertainment,
placing the mobile phone in a certain pocket of the
clothes/trousers to sense the human inertial signals
will become a very convenient, efficient, and reason-
able equipment choice that fits the ultimate use case
(Micucci et al., 2017) (Garcia-Gonzalez et al., 2020).
2.2 Software and Data Acquisition
HAR research relies on large amounts of data, which
includes the laboratory data collections or real-world
acquisition that meet in-house research goals, as well
as the usage of external and public databases to verify
models and methods.
If the research does not involve collecting in-
house data, suitable public open-source datasets can
be found and applied. In this case, other research
teams have already done the “Acquisition” tasks in
the HAR-Pipeline. For example, for biosignal-based
HAR, many open-source datasets focusing on vari-
ous application scenarios, sensor combinations, ac-
tivity definitions, and body parts are online avail-
able, such as (Garcia-Gonzalez et al., 2020), Opportu-
nity (Chavarriaga et al., 2013) (Roggen et al., 2010),
UniMiB SHAR (Micucci et al., 2017), Gait Analysis
DataBase (Loose et al., 2020), ENABL3S (Hu et al.,
2018), Upper-body movement (Santos et al., 2020),
FORTH-TRACE (Karagiannaki et al., 2016), Real-
World (Sztyler and Stuckenschmidt, 2016), PAMAP2
(Reiss and Stricker, 2012b) (Reiss and Stricker,
2012a), and CSL-SHARE (Liu et al., 2021a).
When researchers decide to record in-house data
for specific research purpose, data collection will be-
come an essential part of the entire HAR research af-
ter selecting the appropriate acquisition equipment.
Usually, drivers for different programming languages
are provided with the devices/products of sensor so-
lutions sold on the industrial market, allowing users
to access the devices and record the signals them-
selves. Many providers even offer multi-functional
data acquisition software together with sensor prod-
ucts. However, if there are additional requirements
and particular approaches for the data collection pro-
cess, researchers sometimes have to implement cus-
tomized programs or software.
2.3 Segmentation and Annotation
The task of segmentation in the HAR-Pipeline is to
split a relatively long sequence of activities into sev-
eral segments of single activity, which are suitable for
model training and offline recognition, while anno-
tation is the process of labeling each segment, such
as “walk,” “jump,” or “cutting a cake,” according to
different definitions of human activities in different
datasets and application scenarios.
In many cases, segmentation and annotation are
performed simultaneously. However, we separate
them into two sub-tasks in the pipeline instead of
merging them together for the following reasons:
• Segmentation and annotation have different post-
stage topics linked to them. As Figure 1 shows,
segmentation is undoubtedly a prerequisite for an-
notation, and its output will be the input for sig-
nal processing and feature extraction, while an-
notation generates labels for two follow-up tasks:
training and evaluation.
• The generation of annotated labels indeed accom-
panies most segmentation work, but segmentation
can also become a research object by itself, such
as ML-based automatic segmentation. The seg-
mented data provided to the signal processing and
feature extraction sub-tasks do not require the par-
ticipation of annotation.
• The annotation itself can also be a research ob-
ject, such as the definition and disambiguation of
single motion, motion sequence, among others.
Segmentation can be performed manually. In the
segmentation work of video-based HAR or biosig-
nal collection supplemented by the video camera(s)
recording the whole process, the acquired dataset will
be segmented by dedicated persons relying on the
video. Another approach of manual segmentation for
biosignal-based HAR is the use of data visualization.
If the collected signals have good recognizable dis-
crimination, we can also segment the data by directly
visualizing the signals. Such being the case, video is
not necessarily required. If we thoroughly know what
happened during the data collection, e.g., through de-
tailed text records, the process will be more efficient.
Taking Figure 2 as an example, since the sensors are
marked clearly in the visualization, if we accurately
get informed what activities happened during the data
acquisition, we can segment and annotate the data
manually only based on the data visualization, with-
out applying any video information.
A Practical Wearable Sensor-based Human Activity Recognition Research Pipeline
849
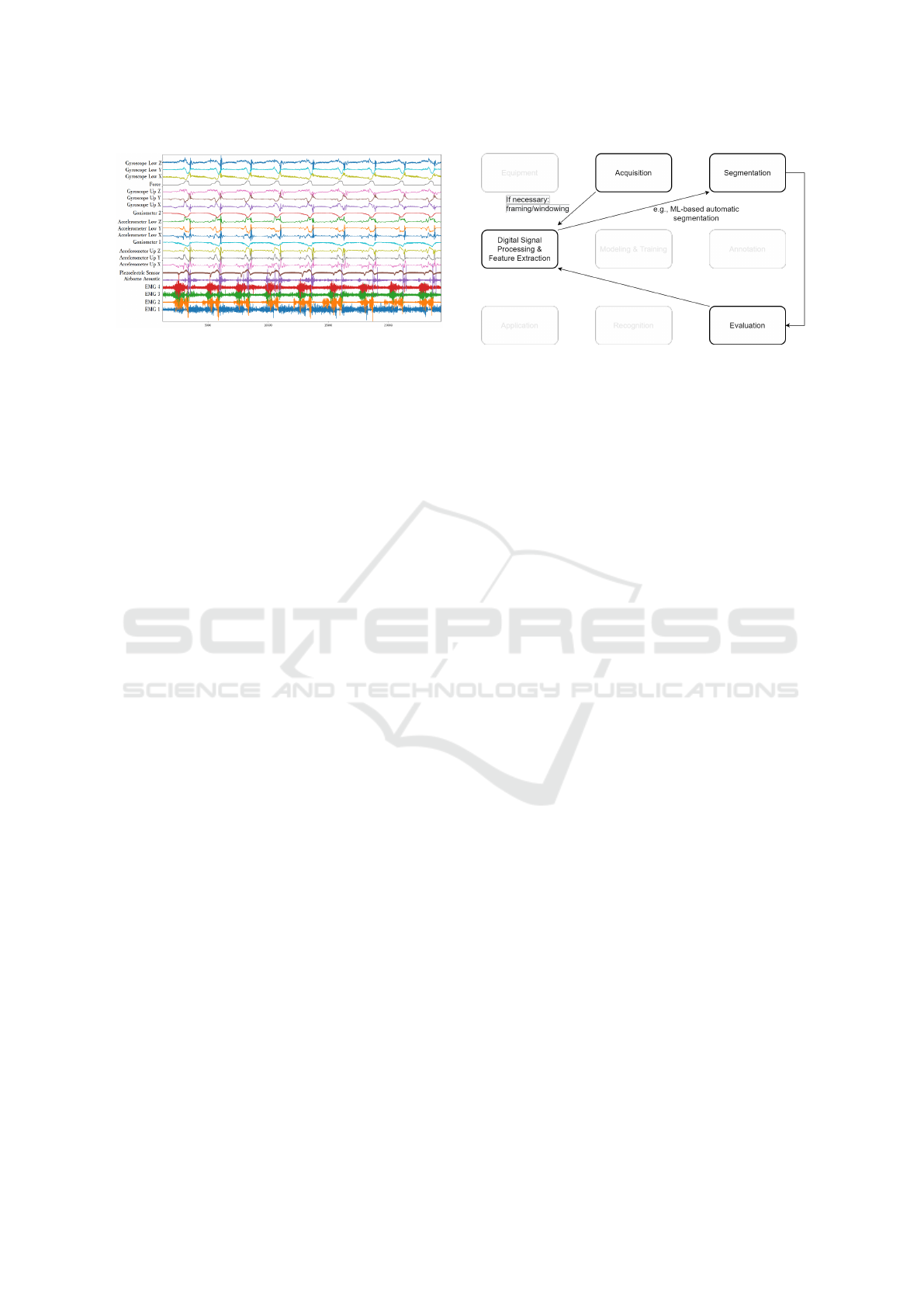
Figure 2: An example of multisensorial data visualization
for data segmentation.
The advantages of manual segmentation are ap-
parent. It is straightforward and intuitive, and the re-
sult should be close to the human’s understanding of
“activity.” The segmented data has, therefore, strong
rationality and readability. Moreover, manual seg-
mentation can often be accompanied by annotation —
marking each segment with a predefined label. How-
ever, the shortcomings of manual segmentation can-
not be ignored.
First, manual segmentation has high requirements
for the operators: concentration, patience, attentive-
ness, and even the need to receive some training in
advance to adapt to the segmentation requirements for
specific research tasks. Even so, manual segmenta-
tion is still unavoidably subjective, resulting in poor
repeatability and errors due to human factors. (Kahol
et al., 2003) uses a comparative example to corrobo-
rate the subjectivity during the manual segmentation:
for the segmentation work of the same data piece, the
first annotator set 10 boundaries, while the second an-
notator set 21. The synchronization mechanism be-
tween video signals and biosignals will also affect
the quality of the segmentation results on biosignal
data — often, acoustic or optical signals are used to
confirm the starting/ending synchronization points in
time. Last but not least, manual segmentation is more
expensive in terms of time and labor cost.
Besides manual segmentation, modern ML meth-
ods, like Gaussian Mixture Models (GMMs), Prin-
cipal Component Analysis (PCA), and Probabilis-
tic Principal Component Analysis (PPCA), are be-
ing used to segment human activity automatically or
semi-supervised (Barbi
ˇ
c et al., 2004). (Guenterberg
et al., 2009) applied signal energy to segment data.
Moreover, appropriate features of long-term signals
instead of segments can be extracted for the seg-
mentation task, such as the research in (Ali and Ag-
garwal, 2001). The research on segmentation algo-
rithms forms a segmentation-study-loop in the HAR-
Pipeline, as shown in Figure 3.
In addition, some datasets use non-conventional
Figure 3: The segmentation-study-loop in the HAR-
Pipeline.
segmentation methods to save time, such as sim-
ple statistical analysis-based segmentation and man-
ual intervention-based semi-automatic segmentation,
which can enable researchers to obtain expected data
segments as early as possible for subsequent research
without having to stay too long at this stage.
The data in the UniMiB SHAR dataset (Micucci
et al., 2017) are automatically and uniquely seg-
mented into three-second windows around a magni-
tude peak during the activities. This automatic seg-
mentation mechanism is effortless to execute and has
no demand on equipment or ML algorithms. How-
ever, the resulted segments are not always correct due
to a certain number of too-long or too-shot activity
segments, as well as misinterpreted peaks that do not
belong to the assigned activity. The use of fixed-value
window length has a good simulation for real-time
HAR systems.
In the CSL-SHARE dataset, a pushbutton was ap-
plied for a semi-automated segmentation and anno-
tation solution, of which the applicability and cor-
rectness have been verified during numerous exper-
iments (see Section 3). The so-called protocol-for-
pushbutton mechanism loads a predefined activity se-
quence protocol during each data recording session
and prompts the user to perform the activities one af-
ter the other. Each activity is displayed on the screen
one by one while the user controls the activity record-
ing by pushing, holding, and releasing the pushbutton.
For example, the user sees the instruction “please hold
the pushbutton and do: sit-to-stand” and prepares for
it, then pushes the button and starts to do the activ-
ity “sit-to-stand.” They keep holding the pushbutton
while standing up from sitting, then release it to fin-
ish this activity. With the release, the system displays
the next activity instruction, e.g., “stand,” the process
continues until the predefined acquisition protocol is
fully processed.
The protocol-for-pushbutton mechanism was im-
plemented to reduce the time and labor costs of man-
WHC 2022 - Special Session on Wearable HealthCare
850

ual annotation. The resulting segmentations required
little to no manual correction, and lay a good founda-
tion for subsequent research. Nevertheless, this mech-
anism has some limitations (Liu et al., 2021a):
• The mechanism can only be applied during ac-
quisition and is incapable of segmenting archived
data;
• Clear activity start-/endpoints need to be defined,
which is impossible in cases like field studies;
• Activities requiring both hands are not possible
due to participants holding the pushbutton;
• The pushbutton operation may consciously or
subconsciously affect the activity execution;
• The participant forgetting to push or release the
button results in subsequent segmentation errors.
2.4 Biosignal Processing, Feature
Extraction, and Feature Study
HAR research is inextricably linked with signal pro-
cessing. Compared to traditional electronic signals,
biosignals have some unique properties that highlight
the research topics of biosignal processing.
Some signal processing jobs can occur before seg-
mentation (directly after or even during the acqui-
sition), such as filtering, amplification, noise reduc-
tion, and artifact removal. Another common exam-
ple is normalization, which can also be applied to the
whole collected biosignals instead of segments. Real-
time systems need to use accumulated normalization
because what we obtain from a real-time recording
is always the continuous influx of short-term sig-
nal streams. Besides, feature extraction may also
occur before segmentation, such as in the research
of feature-based segmentation (Ali and Aggarwal,
2001), as described in Figure 3.
Due to the characteristics of biosignals and the
demand for training and decoding, the segmented
biosignals need to be preprocessed before further
steps, a typical application of Digital Signal Process-
ing (DSP). Usually, the biosignals are firstly win-
dowed using a specific window function with overlap.
Taking the common-used biosignals as an example, a
mean normalization is usually applied to the inertial
and the EMG signals to reduce the impact of Earth ac-
celeration and set the EMG signals’ baseline to zero.
Then, the EMG signals are rectified, a widely adopted
signal processing method for muscle activities (Liu
and Schultz, 2018).
Because multimodal biosignals or video data for
HAR systems are usually large-scale data, it is not
common to use the raw data directly. Therefore, sub-
sequently, features are extracted from each of the re-
sulting windows.
Figure 4: Example of building a feature vector: windowing
and feature extraction for 400 ms window size.
Figure 4 illustrates with a schema the window-
ing and feature extraction on multichannel signals to
build feature vectors. The 12-channel signals are win-
dowed through a shifting window with a length of 400
ms and an overlap of 200 ms. Usually, the overlap be-
tween two adjacent windows can have a length cho-
sen between 0 and the window length: the smaller
the overlap length, the longer the training time of the
model. Based on the windowing function, features
will be extracted from each channel and form a fea-
ture vector of a window, which will be used for the
follow-up tasks of training and recognition. The fea-
ture vector in the example of Figure 4 has a mini-
mal dimension of twelve when only one feature is ex-
tracted from each signal channel.
Figure 4 implies two typical features applied in
many pieces of HAR research works, namely aver-
age and Root Mean Square (RMS), from the statisti-
cal domain. Besides, there are also various applicable
features of time series in the time domain and the fre-
quency domain. (Figueira et al., 2016) summarized
many features for HAR research in statistical, tempo-
ral, and spectral domains. Hence, numerous features
can be extracted from various types of signals. The
use of existing open-source feature libraries, such as
the Time Series Feature Extraction Library (TSFEL)
(Barandas et al., 2020) and the Time Series FeatuRe
Extraction on basis of Scalable Hypothesis tests (ts-
fresh) (Christ et al., 2018), will significantly broaden
the types of functional features and improve the effi-
ciency of feature calculation.
Features of different signals can be combined by
early or late fusion, i.e., the feature vectors of sin-
gle signal streams are either concatenated to form one
multi-signal feature vector (early fusion), or recog-
nition is performed on single signal feature vectors,
A Practical Wearable Sensor-based Human Activity Recognition Research Pipeline
851

and the combination is done on decision level (late
fusion).
Figure 5: The feature-study-loop in the HAR-Pipeline.
Usually, the modeling, training and recognition
research of the HAR-Pipeline takes feature-related re-
search as the premise, including feature dimensional-
ity study (feature vector stacking and feature space
reduction) and feature selection. Figure 5 depicts the
iterative feature-study-loop in the HAR-Pipeline.
For feature space reduction research, commonly
used methods include Principal Component Analy-
sis (PCA) and Linear Discrimination Analysis (LDA).
The former does not require the annotated labels,
while the latter does. For feature selection, methods
such as Minimum Redundancy Maximum Relevance
(mRMR) (Peng et al., 2005) and Analysis of Variance
(ANOVA) (St et al., 1989) (Girden, 1992) can be ap-
plied practically. The greedy forward feature selec-
tion approach based on complete training and recog-
nition operation can provide more convincing results,
but it often costs days to run an experiment. It is note-
worthy that the preliminary studies of features do not
necessarily provide the optimal solutions of the entire
HAR system, but should offer a strong baseline as the
point of departure for the iterative improvement pro-
cess. Figure 5 manifests the iterative process.
2.5 Activity Modeling, Training,
Recognition and Evaluation
Various ML methods for modeling have been applied
to model human activities from sensor data effectively
for later training and recognition, such as Deep Neu-
ral Networks (DNNs) and Hidden Markov Models
(HMMs).
Many pieces of research works have shown the ca-
pability of Convolutional Neural Networks (CNNs)
(Lee et al., 2017) (Ronaoo and Cho, 2015) and Re-
current Neural networks (RNNs) (Inoue et al., 2018)
(Singh et al., 2017) for HAR research. Recently,
Residual Neural Network (ResNet) models (He et al.,
2016), which proved to be a compelling improve-
ment of DNN for image processing, have also been
used to research human activity recognition. A small
amount of literature has already occurred in this di-
rection (Tuncer et al., 2020), (Keshavarzian et al.,
2019), (Long et al., 2019). However, in many cases,
researchers do not know each layer’s specific physi-
cal meaning in neural networks. In contrast, the con-
cept of “states” in the HMM definition-tuple (Rabiner,
1989) may have the better explanatory power of the
activities’ internal structure. In addition to the in-
terpretability, HMM has other advantages for HAR
study, such as the generalizability and reusability of
models and states (Liu et al., 2021b).
HMMs are widely used for various activity recog-
nition tasks, such as (Lukowicz et al., 2004) and
(Amma et al., 2010). The former applies HMMs to
an assembly and maintenance task, while the latter
presents a wearable system that enables 3D handwrit-
ing recognition based on HMMs. In this so-called
Airwriting system, the users write text in the air as
if they were using an imaginary blackboard, while the
handwriting gestures are captured wirelessly by ac-
celerometers and gyroscopes attached to the back of
the hand.
Based on approaches for obtaining adequate ac-
tivities’ knowledge, such as human activity duration
analysis (Liu and Schultz, 2022), the activity models
for training and recognition can be built by any ap-
propriate modeling method for HAR systems such as
CNNs, RNNs, or HMMs. After training the model by
taking the feature vector sequence from the “DSP &
Feature Extraction” task (see Section 2.4) and the la-
bels from the “Annotation” task (see Section 2.3), the
research follows the decoding of the activities based
on the prepared feature vector sequence and provides
the recognition results of the most probable activities.
In some research occasions, Top-N mode can be ap-
plied to generate N recognition results sorted by prob-
abilities. In other words, the recognition result of the
Top-N mode is not just one activity but N most prob-
able activities.
A series of criteria and indicators will be applied
to evaluate the prediction results using the ground
truth provided by annotation: recognition accuracy,
precision, recall, F-score, confusion matrix, among
others. The evaluation results will contribute to im-
proving the modeling, training, segmentation studies,
and feature studies. Besides the segmentation-study-
loop (see Figure 3) and the feature-study-loop (see
Figure 5) introduced above, the parameter-tuning-
loop aims to adjust the important parameters in train-
ing, such as the number of Gaussians for each emis-
sion model for HMM-based HAR. New modification
WHC 2022 - Special Session on Wearable HealthCare
852
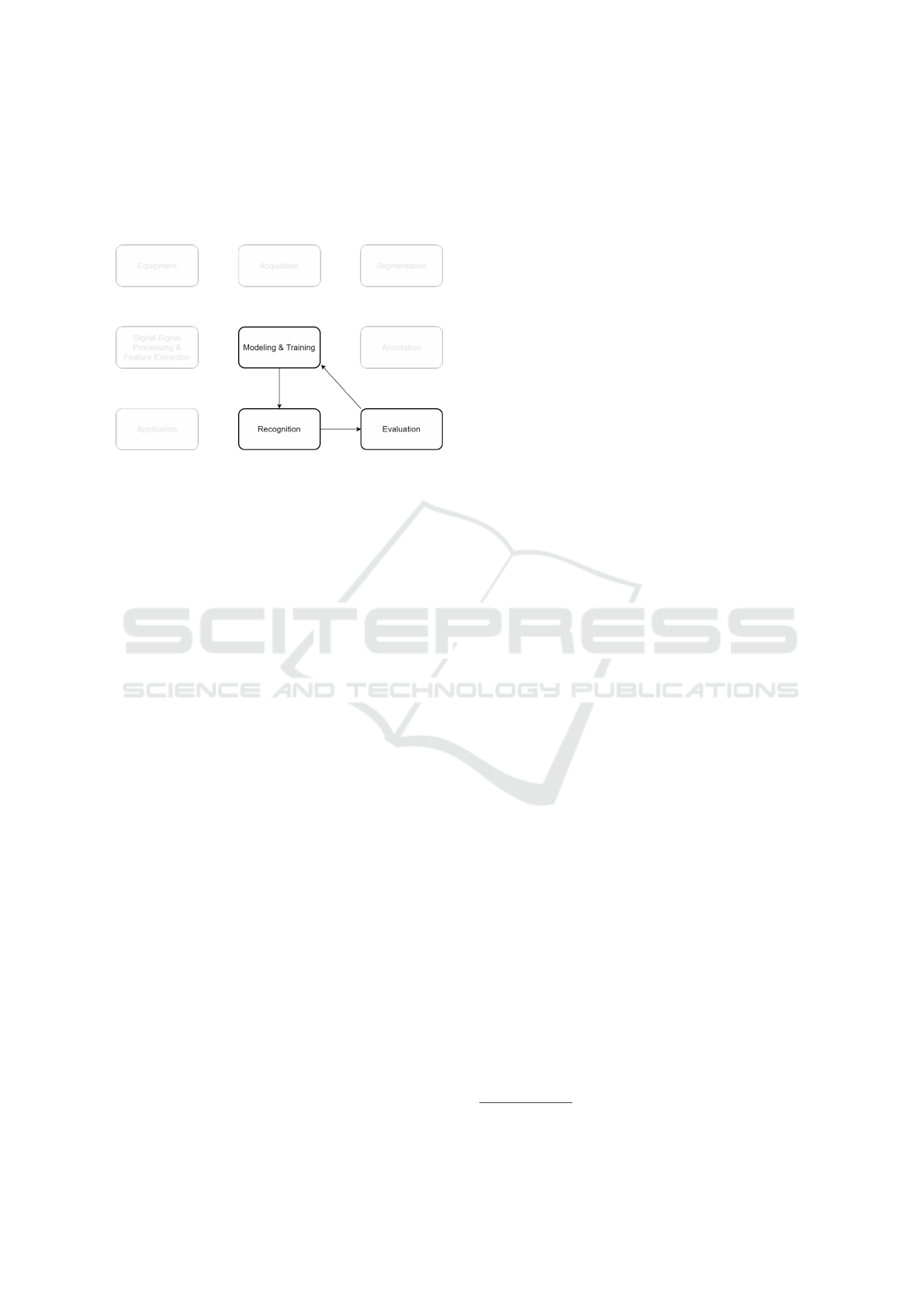
of the modeling, such as state amount and state gener-
alization, can also happen during the re-training pro-
cess. The loop for parameter tuning and modeling
optimization in Figure 6 guides the iterative experi-
ments.
Figure 6: The parameter-tuning-loop or modeling-
optimization-loop in the HAR-Pipeline.
2.6 Application
The purpose of most HAR research is to contribute
to a practical application environment, such as aux-
iliary medical care, rehabilitation technology, safety
assurance, and interactive entertainment. In many in-
stances, researchers must undergo adjustments from
offline recognition to real-time online performance.
From the final optimized models to reach the ap-
plication level, there are many tasks to accomplish,
such as user demand analysis, software interface de-
velopment, user customization, network and server
technology, among others, some of which should not
be of concern to HAR researchers. However, it should
be pointed out that the “Application” block in the
HAR-Pipeline may not only be the end of the entire
HAR research, just as we did not set the “Equipment”
block as the starting point. The arrow from “Applica-
tion” to “Equipment” displays that, in practice, the ap-
plication considerations play a decisive role in equip-
ment selection (and other related tasks).
3 RESEARCH EXAMPLES
FOLLOWING THE PIPELINE
3.1 From Application to Equipment
In our research, we planned to build an end-to-end
wearable sensor-based HAR system for assisting the
early treatment of gonarthrosis, which is under the
framework of a collaborative research project. There-
fore, we used a knee bandage provided by one of the
project partners as a wearable carrier of sensors, aim-
ing to develop an HAR-based mobile technology sys-
tem that senses its users’ movements utilizing prox-
imity sensors.
The wearable sensor carrier determines which
biosignal acquisition devices and sensors we should
consider and compare, and how we integrate the se-
lected devices and sensors into the knee bandage.
Related research procedures of equipment are expli-
cated in (Liu and Schultz, 2018). Finally, we chose
biosignalsplux
1
, providing expandable solutions of
hot-swappable sensors and automatic synchroniza-
tion. One hub from the biosignalsplux research kit
records biosignals from 8 channels, each up to 16 bits,
simultaneously. The selected accelerometers, gyro-
scopes, and electrogoniometer offer relatively slow
signals, while the nature of the EMG and micro-
phone signals requires higher sampling rates. Low-
sampled channels are up-sampled to be synchronized
and aligned with high-sampled channels.
3.2 From Equipment to Software
Development, Data Acquisition,
Segmentation, and Annotation
We developed a software called Activity Signal Kit
(ASK) (Liu and Schultz, 2018) with a Graphical User
Interface (GUI) and multi-functionalities using the
driver library provided by the company of the de-
vices and sensor products. The ASK software con-
nects and synchronizes recording devices automati-
cally. In the subsequent three data acquisition events,
we used two or three biosignalsplux hubs as recording
devices. Therefore, ASK collects up to 24-channel
sensor data from all hubs simultaneously and contin-
uously. All recorded data are archived orderly with
dates and timestamps for subsequent application.
The novel protocol-for-pushbutton mechanism of
segmentation and annotation (see Section 2.3) has
been implemented in the ASK software. Moreover,
the baseline ASK software provides the functionali-
ties of signal processing, feature extraction, modeling,
training, and recognition by applying our in-house de-
veloped HMM-based decoder BioKIT (Telaar et al.,
2014). As a summary, the ASK baseline software has
the following features:
• Connects to wearable biosignal recording devices;
• Enables multisensorial acquisition and archiving;
• Implements protocol-for-pushbutton mechanism
of practical segmentation and annotation;
1
biosignalsplux.com
A Practical Wearable Sensor-based Human Activity Recognition Research Pipeline
853

• Processes biosignals and extracts feature vectors
for iterative feature studies (see Figure 5);
• Facilitates modeling research with the training-
recognition-evaluation iteration (see Figure 6).
A series of upgraded and expanded versions of
the ASK baseline software, such as the real-time end-
to-end HAR system and its on-the-fly add-on, have
been developed based on modeling and recognition
achievements after the proof-of-concept modeling ex-
periments (Liu and Schultz, 2019).
After finishing the ASK software development
and the first testing cycle, we applied it to collect-
ing a pilot one-subject seven-activity dataset to val-
idate the HAR-Pipeline and the software’s practica-
bility and robustness. The experimental results are
described in (Liu and Schultz, 2018). After ensur-
ing that the data collection function of the ASK Soft-
ware runs efficiently without errors and obstacles, we
continued to record a larger four-subject dataset of 18
activities using the ASK software. The CSL-SHARE
(Cognitive Systems Lab Sensor-based Human Activ-
ity REcordings) dataset (called CSL19 in the earlier
pieces of literature) is a follow-up to the two datasets
mentioned above and was recorded in a controlled
laboratory environment. It contains 20 participants’
22 activities in 17 channels of 4 sensor types. Stand-
ing on the dataset’s robustness according to our nu-
merous experimental results, we have shared the CSL-
SHARE dataset as an open-source wearable sensor-
based dataset, contributing research materials to the
researchers in related fields (Liu et al., 2021a).
This “pilot—advanced—comprehensive—share”
data accumulation process well reflects the applica-
tion of the HAR-Pipeline: After each dataset was col-
lected, it went through each pipeline component for
verification, laying the foundation for the improved
collection work in the next stage.
3.3 From Data to Feature Study
Based on the segmented and annotated data, we con-
tinued to extract various features by utilizing the joint-
developed feature library. An example of feature
visualization on the above-introduced CSL-SHARE
dataset is given in (Barandas et al., 2020). Subse-
quently, we studied the feature selection and feature
dimensionality (feature vector stacking and feature
space reduction) on our in-house collected datasets
and one external open-source dataset to create a good
benchmark for the subsequent modeling study, such
as presented in (Hartmann et al., 2020) (Hartmann
et al., 2021), and (Hartmann et al., 2022).
3.4 From Feature Study to Human
Activity Modeling Research
On different datasets, we applied various types of
HMM modeling topologies to study the human activ-
ity modeling according to the study-loop illustrated
in Figure 6. Each activity can be modeled using a
single HMM state (Liu and Schultz, 2018), (Liu and
Schultz, 2019), or a fixed number (greater than one)
of HMM states (Hartmann et al., 2020), (Liu and
Schultz, 2019), (Rebelo et al., 2013). Both topologies
work, but with shortcomings (Xue and Liu, 2021).
Regarding the fact that no matter the fixed number
of states, each state’s meaning is still unknown, (Liu
et al., 2021b) explores two problems: Could/should
each activity contain a separate, explanatory number
of states? Is there an approach to design HMMs of
human activities more rule-based, normalized over
blindly “trying”? A novel modeling technology, Mo-
tion Units, endowed with operability, universality, and
expandability, was proposed to solve the questions.
3.5 From Modeling Research to
Application
A wearable real-time HAR system Activity Signal Kit
Echtzeit-Decoder (ASKED) (Liu and Schultz, 2019)
was further implemented based on the modeling ex-
perimental results on the pilot dataset, which verifies
the data recording, feature extraction, training, and
recognition functionality in the ASK baseline soft-
ware (see Section 3.2).
Balance of accuracy versus speed was first stud-
ied to improve real-time recognition performance. A
shorter step-size of windows shift results in a shorter
delay of the recognition outcomes, but the interim
recognition results may fluctuate due to temporary
search errors. On the other hand, longer delay due to
larger step-sizes contradicts a real-time system’s char-
acteristics, though it generates more accurate interim
recognition results. According to the activity duration
analysis (Liu and Schultz, 2022), the experimental re-
sults, and the user experience, a balancing setting of
400 ms window length with 200 ms window overlap
performs the best, providing satisfactory recognition
results with a barely noticeable delay.
More introduction to our real-time HAR system,
including its engaging on-the-fly add-on functional-
ity, can be found in (Liu and Schultz, 2019).
WHC 2022 - Special Session on Wearable HealthCare
854

4 CONCLUSIONS
Based on the purpose of sharing our years of re-
search experience, in this paper, we propose a prac-
tical, comprehensive HAR research pipeline, called
HAR-Pipeline, composed of nine research aspects,
aiming to reflect the entire perspective of HAR re-
search topics to the greatest extent and indicate the
sequence and relationship between the tasks. Supple-
mented by our actual series of studies as examples,
we exhibited the proposed pipeline’s feasibility.
REFERENCES
Ali, A. and Aggarwal, J. (2001). Segmentation and recog-
nition of continuous human activity. In Proceed-
ings IEEE Workshop on Detection and Recognition of
Events in Video, pages 28–35. IEEE.
Amma, C., Gehrig, D., and Schultz, T. (2010). Airwrit-
ing recognition using wearable motion sensors. In
First Augmented Human International Conference,
page 10. ACM.
Barandas, M., Folgado, D., Fernandes, L., Santos, S.,
Abreu, M., Bota, P., Liu, H., Schultz, T., and Gam-
boa, H. (2020). TSFEL: Time series feature extraction
library. SoftwareX, 11:100456.
Barbi
ˇ
c, J., Safonova, A., Pan, J.-Y., Faloutsos, C., Hodgins,
J. K., and Pollard, N. S. (2004). Segmenting motion
capture data into distinct behaviors. In Proceedings of
Graphics Interface, pages 185–194. Citeseer.
Bulling, A., Blanke, U., and Schiele, B. (2014). A tuto-
rial on human activity recognition using body-worn
inertial sensors. ACM Computing Surveys (CSUR),
46(3):1–33.
Chavarriaga, R., Sagha, H., Calatroni, A., Digumarti, S. T.,
Tr
¨
oster, G., Mill
´
an, J. d. R., and Roggen, D. (2013).
The Opportunity challenge: A benchmark database
for on-body sensor-based activity recognition. Pattern
Recognition Letters, 34(15):2033–2042.
Christ, M., Braun, N., Neuffer, J., and Kempa-Liehr, A. W.
(2018). Time series feature extraction on basis of scal-
able hypothesis tests (tsfresh–a python package). Neu-
rocomputing, 307:72–77.
Figueira, C., Matias, R., and Gamboa, H. (2016). Body
location independent activity monitoring. In Pro-
ceedings of the 9th International Joint Conference on
Biomedical Engineering Systems and Technologies -
Volume 4: BIOSIGNALS, pages 190–197. INSTICC,
SciTePress.
Garcia-Gonzalez, D., Rivero, D., Fernandez-Blanco, E.,
and Luaces, M. R. (2020). A public domain dataset
for real-life human activity recognition using smart-
phone sensors. Sensors, 20(8):2200.
Girden, E. R. (1992). ANOVA: Repeated measures. Sage.
Guenterberg, E., Ostadabbas, S., Ghasemzadeh, H., and
Jafari, R. (2009). An automatic segmentation tech-
nique in body sensor networks based on signal en-
ergy. In Proceedings of the Fourth International Con-
ference on Body Area Networks. Institute for Com-
puter Sciences, Social-Informatics and Telecommuni-
cations Engineering.
Hartmann, Y., Liu, H., Lahrberg, S., and Schultz, T. (2022).
Interpretable high-level features for human activity
recognition. In BIOSIGNALS 2022 — 15th Interna-
tional Conference on Bio-inspired Systems and Signal
Processing. INSTICC, SciTePress. forthcoming.
Hartmann, Y., Liu, H., and Schultz, T. (2020). Feature space
reduction for multimodal human activity recognition.
In Proceedings of the 13th International Joint Confer-
ence on Biomedical Engineering Systems and Tech-
nologies - Volume 4: BIOSIGNALS, pages 135–140.
INSTICC, SciTePress.
Hartmann, Y., Liu, H., and Schultz, T. (2021). Feature
space reduction for human activity recognition based
on multi-channel biosignals. In Proceedings of the
14th International Joint Conference on Biomedical
Engineering Systems and Technologies, pages 215–
222. INSTICC, SciTePress.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In CVPR 2016
- IEEE Conference on Computer Vision and Pattern
Recognition, pages 770–778.
Hu, B., Rouse, E., and Hargrove, L. (2018). Benchmark
datasets for bilateral lower-limb neuromechanical sig-
nals from wearable sensors during unassisted locomo-
tion in able-bodied individuals. Frontiers in Robotics
and AI, 5:14.
Inoue, M., Inoue, S., and Nishida, T. (2018). Deep recurrent
neural network for mobile human activity recognition
with high throughput. Artificial Life and Robotics,
23(2):173–185.
Kahol, K., Tripathi, P., Panchanathan, S., and Rikakis, T.
(2003). Gesture segmentation in complex motion se-
quences. In Proceedings of 2003 International Con-
ference on Image Processing, volume 2, pages II–105.
IEEE.
Karagiannaki, K., Panousopoulou, A., and Tsakalides, P.
(2016). The forth-trace dataset for human activity
recognition of simple activities and postural transi-
tions using a body area network.
Ke, S.-R., Thuc, H. L. U., Lee, Y.-J., Hwang, J.-N., Yoo, J.-
H., and Choi, K.-H. (2013). A review on video-based
human activity recognition. Computers, 2(2):88–131.
Keshavarzian, A., Sharifian, S., and Seyedin, S. (2019).
Modified deep residual network architecture deployed
on serverless framework of iot platform based on hu-
man activity recognition application. Future Genera-
tion Computer Systems, 101:14–28.
Lara, O. D. and Labrador, M. A. (2012). A survey
on human activity recognition using wearable sen-
sors. IEEE communications surveys & tutorials,
15(3):1192–1209.
Lee, S.-M., Yoon, S. M., and Cho, H. (2017). Human
activity recognition from accelerometer data using
convolutional neural network. In BIGCOMP 2017
- IEEE International Conference on Big Data and
Smart Computing, pages 131–134. IEEE.
A Practical Wearable Sensor-based Human Activity Recognition Research Pipeline
855

Liu, H. (2021). Biosignal Processing and Activity Model-
ing for Multimodal Human Activity Recognition. PhD
thesis, University of Bremen.
Liu, H., Hartmann, Y., and Schultz, T. (2021a). CSL-
SHARE: A multimodal wearable sensor-based human
activity dataset. Frontiers in Computer Science, 3:90.
Liu, H., Hartmann, Y., and Schultz, T. (2021b). Mo-
tion Units: Generalized sequence modeling of hu-
man activities for sensor-based activity recognition. In
EUSIPCO 2021 — 29th European Signal Processing
Conference, pages 1506–1510.
Liu, H. and Schultz, T. (2018). ASK: A framework for data
acquisition and activity recognition. In Proceedings of
the 11th International Joint Conference on Biomedi-
cal Engineering Systems and Technologies - Volume 3:
BIOSIGNALS, pages 262–268. INSTICC, SciTePress.
Liu, H. and Schultz, T. (2019). A wearable real-time hu-
man activity recognition system using biosensors in-
tegrated into a knee bandage. In Proceedings of the
12th International Joint Conference on Biomedical
Engineering Systems and Technologies - Volume 1:
BIODEVICES, pages 47–55. INSTICC, SciTePress.
Liu, H. and Schultz, T. (2022). How long are various
types of daily activities? statistical analysis of a multi-
modal wearable sensor-based human activity dataset.
In HEALTHINF 2022 — 15th International Confer-
ence on Health Informatics. INSTICC, SciTePress.
forthcoming.
Long, J., Sun, W., Yang, Z., and Raymond, O. I. (2019).
Asymmetric residual neural network for accurate hu-
man activity recognition. Information, 10(6):203.
Loose, H., Tetzlaff, L., and Bolmgren, J. L. (2020). A public
dataset of overground and treadmill walking in healthy
individuals captured by wearable imu and semg sen-
sors. In Biosignals 2020 - 13th International Confer-
ence on Bio-Inspired Systems and Signal Processing,
pages 164–171. INSTICC, SciTePress.
Lukowicz, P., Ward, J. A., Junker, H., St
¨
ager, M., Tr
¨
oster,
G., Atrash, A., and Starner, T. (2004). Recognizing
workshop activity using body worn microphones and
accelerometers. In In Pervasive Computing, pages 18–
32.
Micucci, D., Mobilio, M., and Napoletano, P. (2017).
UniMiB SHAR: A dataset for human activity recog-
nition using acceleration data from smartphones. Ap-
plied Sciences, 7(10):1101.
Peng, H., Long, F., and Ding, C. (2005). Feature se-
lection based on mutual information criteria of max-
dependency, max-relevance, and min-redundancy.
IEEE Transactions on pattern analysis and machine
intelligence, 27(8):1226–1238.
Rabiner, L. R. (1989). A tutorial on hidden markov mod-
els and selected applications in speech recognition. In
Proceedings of the IEEE, volume 77(2), pages 257–
286.
Rebelo, D., Amma, C., Gamboa, H., and Schultz, T. (2013).
Human activity recognition for an intelligent knee or-
thosis. In BIOSIGNALS 2013 - 6th International Con-
ference on Bio-inspired Systems and Signal Process-
ing, pages 368–371.
Reiss, A. and Stricker, D. (2012a). Creating and bench-
marking a new dataset for physical activity monitor-
ing. In Proceedings of the 5th International Confer-
ence on Pervasive Technologies Related to Assistive
Environments, pages 1–8.
Reiss, A. and Stricker, D. (2012b). Introducing a new
benchmarked dataset for activity monitoring. In ISWC
2012 - 16th International Symposium on Wearable
Computers, pages 108–109. IEEE.
Roggen, D., Calatroni, A., Rossi, M., Holleczek, T., F
¨
orster,
K., Tr
¨
oster, G., Lukowicz, P., Bannach, D., Pirkl, G.,
Ferscha, A., et al. (2010). Collecting complex activ-
ity datasets in highly rich networked sensor environ-
ments. In INSS 2010 - 7th International Conference
on Networked Sensing Systems, pages 233–240. IEEE.
Ronaoo, C. A. and Cho, S.-B. (2015). Evaluation of deep
convolutional neural network architectures for human
activity recognition with smartphone sensors. Jour-
nal of the Korean Information Science Society, pages
858–860.
Santos, S., Folgado, D., and Gamboa, H. (2020). Upper-
body movements: Precise tracking of human motion
using inertial sensors.
Singh, D., Merdivan, E., Psychoula, I., Kropf, J., Hanke,
S., Geist, M., and Holzinger, A. (2017). Human ac-
tivity recognition using recurrent neural networks. In
CD-MAKE 2017 - International Cross-Domain Con-
ference for Machine Learning and Knowledge Extrac-
tion, pages 267–274. Springer.
St, L., Wold, S., et al. (1989). Analysis of variance
(anova). Chemometrics and intelligent laboratory sys-
tems, 6(4):259–272.
Sztyler, T. and Stuckenschmidt, H. (2016). On-body lo-
calization of wearable devices: An investigation of
position-aware activity recognition. In PerCom 2016
- 14th IEEE International Conference on Pervasive
Computing and Communications, pages 1–9. IEEE
Computer Society.
Telaar, D., Wand, M., Gehrig, D., Putze, F., Amma, C.,
Heger, D., Vu, N. T., Erhardt, M., Schlippe, T.,
Janke, M., et al. (2014). Biokit—real-time decoder
for biosignal processing. In INTERSPEECH 2014 -
15th Annual Conference of the International Speech
Communication Association.
Tuncer, T., Ertam, F., Dogan, S., Aydemir, E., and Pławiak,
P. (2020). Ensemble residual network-based gender
and activity recognition method with signals. The
Journal of Supercomputing, 76(3):2119–2138.
Weinland, D., Ronfard, R., and Boyer, E. (2011). A sur-
vey of vision-based methods for action representation,
segmentation and recognition. Computer vision and
image understanding, 115(2):224–241.
Xue, T. and Liu, H. (2021). Hidden Markov Model and its
application in human activity recognition and fall de-
tection: A review. In CSPS 2021 - 10th International
Conference on Communications, Signal Processing,
and Systems. forthcoming.
WHC 2022 - Special Session on Wearable HealthCare
856
