
Road Scene Analysis: A Study of Polarimetric and Color-based Features
under Various Adverse Weather Conditions
Rachel Blin
1 a
, Samia Ainouz
1 b
, Stéphane Canu
1 c
and Fabrice Meriaudeau
2 d
1
Normandie Univ., INSA Rouen, LITIS, 76000 Rouen, France
2
University of Burgundy, UBFC, ImViA, 71200 Le Creusot, France
Keywords:
Road Scene, Object Detection, Adverse Weather Conditions, Polarimetric Imaging, Data Fusion, Deep
Learning.
Abstract:
Autonomous vehicles and ADAS systems require a reliable road scene analysis to guarantee road users’ safety.
While most of autonomous systems provide an accurate road objects detection in good weather conditions,
there are still some improvements to be made when visibility is altered. Polarimetric features combined with
color-based ones have shown great performances in enhancing road scenes under fog. The question remains
to generalize these results to other adverse weather situations. To this end, this work experimentally compares
the behaviour of the polarimetric intensities, the polarimetric Stokes parameters and the RGB images as well
as their combination in different fog densities and under tropical rain. The different detection tasks show
a significant improvement when using a relevant fusion scheme and features combination in all the studied
adverse weather situations. The obtained results are encouraging regarding the use of polarimetric features to
enhance road scene analysis under a wide range of adverse weather conditions.
1 INTRODUCTION
Autonomous vehicles and ADAS systems have shown
outstanding improvements these past few years
thanks to a more accurate and reliable road scene
analysis. Object detection, which is essential to un-
derstand road scenes, has widely contributed to these
improvements. While autonomous vehicles can be
found in several places, e.g. the Waymo car
1
in Ari-
zona and the Rouen Normandy autonomous lab
2
in
France, they are restricted to a small driving area
and can not go above a fixed speed limit. More-
over, all these systems are limited when the visi-
bility is altered, in case of adverse weather condi-
tions, since they struggle reliably to detect road ob-
jects. Because conventional imaging is very sensitive
to lighting variations, it fails to properly characterize
objects in these complex weather situations. Using
non-conventional sensors is nowadays the best alter-
a
https://orcid.org/0000-0003-1036-154X
b
https://orcid.org/0000-0002-2699-4002
c
https://orcid.org/0000-0002-7602-4557
d
https://orcid.org/0000-0002-8656-9913
1
https://waymo.com/
2
https://www.rouennormandyautonomouslab.com/
native solution to improve road scenes analysis when
the conditions are not optimal (Bijelic et al., 2018).
Lidar is used to improve localization accuracy under
rain and snow (Aldibaja et al., 2016). Lidar com-
bined with color-based images also helps improving
road object detection in low-light conditions (Rashed
et al., 2019). An infra-red camera enables to detect
vehicles at a larger distance range than a color-based
sensor under fog (Pinchon et al., 2018). In (Major
et al., 2019), a radar is used to enhance road object
detection for fast moving vehicles, when the line-of-
sight is reduced, like in highway environments. More
recently, the use of polarimetric imaging helped en-
hancing road scenes understanding under fog, since it
is able to generalize the road objects’ features learnt in
good weather conditions to foggy scenes, to the con-
trary of conventional color-based sensors (Blin et al.,
2020).
These preliminary results are encouraging but are
limited since they explore only one fog density. A
wider study on various adverse weather conditions
needs to be carried out to extend these results to all
kinds of low visibility conditions. In this work, the
behaviour of polarimetric and color-based features is
studied in several adverse weather conditions, includ-
ing several densities of fog and tropical rain. To
236
Blin, R., Ainouz, S., Canu, S. and Meriaudeau, F.
Road Scene Analysis: A Study of Polarimetric and Color-based Features under Various Adverse Weather Conditions.
DOI: 10.5220/0010961700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
236-244
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

this end, a dataset containing road scenes under 11
different weather conditions is constituted. Two fu-
sion schemes on several polarimetric features as well
as polarimetric and color-based features are also ex-
plored. As a matter of fact, fusing multimodal fea-
tures is paramount to enable better scene perception
for autonomous driving. Indeed, if the road scene
analysis relies on only one modality, any perturba-
tion in the sensor could alter the scene analysis and
directly impact the vehicle decision and then the road
users’ safety (Feng et al., 2020). Moreover, combin-
ing information from multimodal sensors also enables
to describe a road scene under different angles (Nie
et al., 2020; Gu et al., 2018) and provides a more rel-
evant scene description when the visibility is altered
(Bijelic et al., 2020).
The contributions of this paper are fourfold:
• Constitution of a multimodal polarimetric and
color-based dataset for road scene analysis in var-
ious adverse weather conditions,
• Study of different polarimetric and color-based
features in such complex situations,
• Exploration of two fusion schemes of polarimetric
and color-based features,
• Enhancement of object detection in road scenes in
adverse weather situations.
The code used in this work can be downloaded
at: https://github.com/RachelBlin/keras-retinanet and
the WPolar dataset can be downloaded at: https:
//zenodo.org/record/5547801#.Ycintrso9uQ
2 POLARIZATION FORMALISM
AND RELATED WORK
When an electromagnetic light wave is being reflected
by an object, it is partially linearly polarized. Polari-
metric imaging captures the polarization state of the
reflected light, i.e. the direction in which the wave is
travelling. It enables to characterize an object by its
physical properties, giving information on the nature
of the object’s surface the light wave impinges on.
The polarization state of the reflected light can be de-
scribe by the linear Stokes vector S =
S
0
S
1
S
2
>
,
which is a set of measurable parameters (Bass et al.,
1995). A polarizer oriented at a specific angle α
i
is re-
quired to capture polarimetric images, measuring an
intensity I
α
i
. To reconstruct the Stokes vector char-
acterizing the reflected wave, at least three intensi-
ties I
α
i
,i=1:3
, corresponding to the polarizer oriented
at three different angles α
i,i=1:3
, are needed. A Polar-
cam 4D Technology polarimetric camera
3
is used in
this work. This camera contains four different linear
polarizers, oriented at four different angles, includ-
ing 0°, 45°, 90° and 135°. Four intensities of the
same scene, I =
I
0
I
45
I
90
I
135
>
, are simulta-
neously captured with this polarimetric camera. The
relationship between an intensity I
α
i
,i=1:4
captured by
the camera and the Stokes parameters S is given by:
I
α
i
=
1
2
1 cos(2α
i
) sin(2α
i
)
S
0
S
1
S
2
, ∀i = 1, 4 .
(1)
This equation can be reformulated by:
I = AS , (2)
where A ∈ R
4×3
is the calibration matrix of the linear
polarizer (Blin et al., 2020).
To reconstruct the Stokes vector from the intensi-
ties, the following equation is used:
S =
I
0
+ I
90
I
0
− I
90
I
45
− I
135
. (3)
Other physical features can be obtained from the
Stokes parameters: the Angle Of Polarization (φ) and
the Degree Of linear Polarization (ρ) (Ainouz et al.,
2013). They are expressed in the following way:
φ =
1
2
arctan2
S
2
S
1
, (4)
ρ =
q
S
2
1
+ S
2
2
S
0
, (5)
where ρ ∈ [0, 1] refers to the quantity of the linear po-
larized light in a wave and φ ∈
−
π
2
;
π
2
is the orienta-
tion of the polarized part of the wave with regards to
the incident plan.
Recent works have demonstrated the impact of
polarimetric features to enhance road scene analysis.
The fusion of polarimetric and color-based features
enable to increase car detection (Fan et al., 2018).
The Angle Of Polarisation (φ) is selected to perform
this task as it provides the best results. Two dif-
ferent score maps are obtained by training indepen-
dently a polarimetric-based and a color-based De-
formable Part Models (DPM) (Felzenszwalb et al.,
2008). These two score maps, are used to perform
an AND-fusion between polarimetric and color fea-
tures, resulting in the final detection bounding boxes.
This pipeline, more specifically, the fusion of these
3
https://www.4dtechnology.com/
Road Scene Analysis: A Study of Polarimetric and Color-based Features under Various Adverse Weather Conditions
237

two complementary modalities largely, improves the
detection accuracy by reducing the false alarm rate.
Other experiments focus on road objects detec-
tion under fog, using polarimetric images (Blin et al.,
2019). New data formats using polarimetric features
are created to perform this task. These data formats
provide the necessary features to characterize road
objects when the visibility is altered. When using
an adapted deep learning framework combined with
these data formats, both vehicles and pedestrian de-
tection are enhanced compared to color-based mod-
els. The PolarLITIS dataset is created (Blin et al.,
2020) in order to expand and confirm these results. It
is the first public multimodal dataset, containing po-
larimetric road scenes and their color-based equiva-
lent in various weather conditions (sunny, cloudy and
foggy), labeled with bounding boxes to perform ob-
ject detection.
Our interest in this work is to focus on the explo-
ration of various adverse weather conditions, using
polarimetric and color-based features. Road scenes
under 10 different fog densities, from 15m to 70m vis-
ibility, as well as tropical rain are collected. The rele-
vance of the polarimetric intensities I and the Stokes
vector S to enhance road scene analysis in various
weather situations is studied as well as their limits.
3 THE PROPOSED METHOD
In this section, information regarding the collected
data constituting the WPolar dataset (Weather Po-
larimetric) are first given. The experimental setup,
used to evaluate the performances of polarimetric and
color-based features for road objects detection in var-
ious adverse weather conditions, is then sketched.
3.1 The WPolar Dataset
In the PolarLITIS dataset (Blin et al., 2020), the test-
ing set is exclusively constituted of road scenes un-
der fog. However, since it contains outdoor scenes,
it is difficult to deduce the density of the fog. Know-
ing the properties of adverse weather situations enable
to provide direct information on the visibility of the
scene, as well as, a more precise idea on the ability
of polarimetric features to see beyond human percep-
tion. However, in outdoor scenes, it is difficult to get
such information. Moreover, studying the behaviour
of polarimetric features in diverse weather conditions
is paramount to define the extent of their added value
as well as their limits to describe road scenes in com-
plex situations.
Figure 1: Acquisition setup.
Disposing of road scenes in various adverse
weather conditions is difficult in a reasonable amount
of time. This is due to the fact that weather condi-
tions causing low visibility are not the most common.
To palliate these limitations, an acquisition campaign
was made in the CEREMA tunnel
4
, simulating road
scenes under adverse weather conditions. This facil-
ity is 30m long and simulates fog from 15m visibility
and different densities of rain. It enables to collect
road scenes under various weather conditions while
having exact information on the scene visibility.
During this acquisition campaign, a Polarcam4D
Technology polarimetric camera is placed next to a
GoPro (RGB camera), behind the windshield, at the
height of the driver’s eye. This setup collects paired
multimodal scenes. An illustration of the acquisition
setup can be found in Figure 1.
The polarimetric camera disposes of a standard
lens and has a resolution of 500 × 500 while the RGB
camera has a fisheye lens and a resolution of 3648 ×
2736. To get the closest content possible in the multi-
modal images constituting each pair, the RGB images
are cropped to 1115 × 1165. By keeping the center of
the RGB images, the deformation induced by the fish-
eye lens is attenuated, which implies a closest scene
geometry between the two modalities.
Regarding the content of each road scene, acqui-
sitions were made under 11 different adverse weather
conditions, including 10 different fog densities and
tropical rain. The 10 different fog densities are char-
acterized by their visibility distance, based on human
perception, include 15m, 20m, 25m, 30m, 35m, 40m,
45m, 50m, 60m and 70m. The collected scenes visi-
bility is altered due to the weather conditions but also
because of the presence of water on the windshield.
As a matter of fact, under tropical rain, drops of water
4
https://www.cerema.fr/fr/innovation-recherche/
innovation/offres-technologie/plateforme-simulation-
conditions-climatiques-degradees
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
238

modify the view and a veil of water covers the wind-
shield while the wiper clears the view (see fifth and
sixth columns of Figure 2 for an illustration of these
phenomena). Fog also regularly leads to an accumu-
lation of droplets on the windshield, which gives a
blurring effect to the scene.
The Cerema tunnel is composed of a tar ground,
on which different kind of landmarks can be placed.
Several road signs are also available to simulate real
road scenes. The roof is transparent, which enables
natural sunlight to lighten the tunnel. Once the de-
sired road scene constituted, road users, including
motorized vehicles, pedestrian and cyclists can cir-
culate in the tunnel. All these elements enable to
simulate road scenes with the same content and road
users as a real one. Since the acquisitions were made
within a 30 meters tunnel, the images are selected to
maximize the variability of the scenes. The selected
road scenes ensure the presence of the different road
users at several distances and various combinations of
road users in each image. To provide strictly paired
images, each pair of images was selected manually.
Examples of multimodal images in the database are
shown in Figure 2.
The collected images were labelled for road ob-
jects detection. To this end, three classes are used,
which represent the most common road users: ’car’,
’person’ and ’bike’. The ’car’ class includes all four
wheels vehicles, the class ’person’ includes the pedes-
trian and cyclists and the class ’bike’ designates the
bikes without their cyclists. The number of instances
of each class are summarized up in Table 1. Note that
the RGB images under fog with respectively 25m and
30m visibility are not available due to a technical is-
sue during the acquisition campaign.
Since the images were collected in a tunnel, this
limits the variability of the dataset. This is the rea-
son why the images are only used for evaluation pur-
poses. Including these scenes in the training process
is very likely to bias the evaluation due to over-fitting.
On top of that, not including road scenes in adverse
weather in the training and validation sets enables to
evaluate the ability of polarimetric features learnt in
good weather conditions to describe reliably road ob-
jects when the visibility is altered. Consequently, the
final training and validation sets are the ones of the
PolarLITIS dataset (sunny and cloudy weather) and
the collected images constitute the testing set. The
properties of the final dataset are given in Table 2.
The dataset can be downoaded at: https://doi.org/
10.5281/zenodo.5547801.
4 EXPERIMENTS
In order to study the behaviour of the polarimetric
features in several weather conditions, some experi-
ments are carried out. The first goal of this experi-
ment is to evaluate how invariant are the polarimet-
ric features characterizing road objects to the visibil-
ity conditions. The second goal of the experiment is
to evaluate the relevance of multimodal fusion to en-
hance road object detection in several adverse weather
situations. The polarimetric features selected for this
experiment are the intensity images I = (I
0
, I
45
, I
90
)
and the Stokes images S = (S
0
, S
1
, S
2
) described in
(Blin et al., 2020). The color-based features are RGB
information.
As mentioned in Table 2, the dataset used for the
experiments is constituted of sunny and cloudy road
scenes. This design enables to evaluate if the road
objects features learnt in good weather conditions are
still valid to detect objects when the visibility is al-
tered. The RetinaNet network (Lin et al., 2017), us-
ing a ResNet152 backbone (He et al., 2016) is used
for this task. This object detector, thanks to the focal
loss, focuses on hard misclassified examples during
its training process. This property is useful to pro-
cess datasets with unbalanced classes, as it is the case
herein. It is also able to process images in real time
with a high accuracy, which is paramount to perform
object detection in road scenes. All the experimental
setups are sketched in Figure 3.
A Late fusion scheme is used to fuse the different
modalities of this experiment.
To this end, the Double soft-NMS filter and the
OR filter are constituted. The Double soft-NMS fil-
ter consists in using the soft-NMS algorithm (Bodla
et al., 2017) on each modality to filter the raw pre-
dicted bounding boxes on each modality a first time
and filter a second time the concatenation of the ob-
tained bounding boxes using the soft-NMS algorithm.
The OR filter consists in filtering the raw bounding
boxes of each modality separately, using the soft-
NSM bounding boxes and apply an OR operation on
the two obtained sets of bounding boxes. To fuse the
polarimetric and color-based images, the offset be-
tween these two modalities is computed.
Since the training set is composed of 1640 images
and the validation set of 420 images, it is paramount
to pre-train the network on a larger dataset. The
BDD100K dataset (Yu et al., 2020) is selected for this
task since it is rather large and aims to detect objects
in road scenes in good weather conditions. On top
of that, it contains all the classes of the dataset de-
scribed in Table 2, making fine-tuning towards this
dataset easier. Once the architecture pre-trained on
Road Scene Analysis: A Study of Polarimetric and Color-based Features under Various Adverse Weather Conditions
239
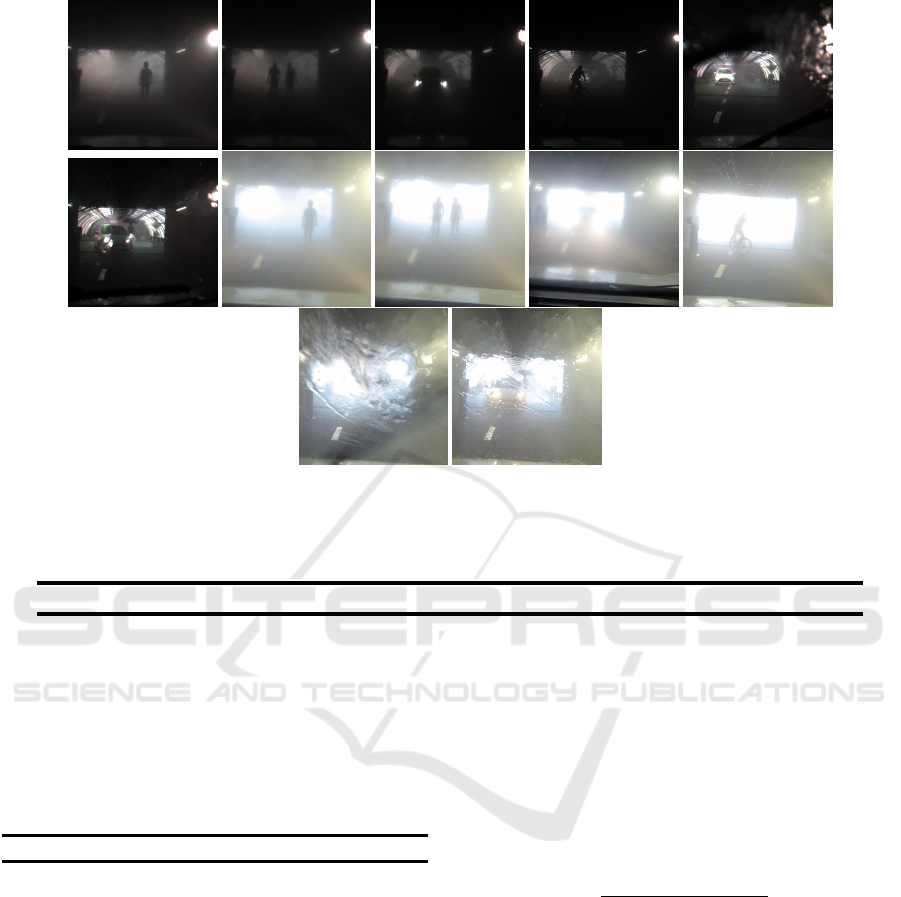
Figure 2: Example of acquisitions at the CEREMA tunnel. The first row are the polarimetric intensity images I = (I
0
, I
45
, I
90
)
and the second row is their equivalent in RGB.
Table 1: Properties of the WPolar dataset, for each weather condition. The first 10 columns refer to the different visibility
distances under fog. It is important to note that the number of instances are valid for the polarimetric and the RGB modalities.
Weather conditions 15m 20m 25m 30m 35m 40m 45m 50m 60m 70m rain
images 44 44 44 44 44 44 44 44 44 44 44
car 25 43 44 42 44 44 44 44 43 44 44
person 54 71 83 90 65 49 70 58 74 74 30
bike 9 13 6 14 9 8 25 14 35 19 0
Table 2: Dataset properties. The training and validation
sets are the ones of PolarLITIS(Blin et al., 2020) dataset.
The testing set contains all the acquisitions of the WPolar
dataset.
Properties Train Validation Test
Weather conditions sunny/cloudy cloudy fog/rain
images 1640 420 484
car 6061 2102 461
person 527 134 718
bike 39 7 152
BDD100K, it is fine-tuned on the PolarLITIS dataset,
on each modality separately (I, S and RGB).
Regarding the training hyperparameters, the ones
provided by the RetinaNet’s article are kept, i.e.
a learning rate of 10
−5
and the Adam optimizer
(Kingma and Ba, 2014). Each training process is re-
peated five times to provide reliable results. Note that
the different architectures are trained for 50 epochs
on the BDD100K dataset and for 20 epochs on the
PolarLITIS dataset. The optimal weights are selected
according to the lowest value of the validation loss.
5 DISCUSSION AND RESULTS
To evaluate the increase in detection scores, the error
rate evolution is computed as follows:
ER
M
o
=
1 − AP
M
o
− (1 − AP
I
o
)
1 − AP
I
o
× 100 , (6)
where ER
M
o
is the error rate evolution between the in-
tensities polarimetric data format I and the modality
M ∈ {S, RGB, I + S (2× soft-NMS), I + S (OR filter),
I+RGB (2× soft-NMS), I+RGB (OR filter)} for ob-
ject o ∈ {
0
person
0
,
0
car
0
, mAP}, AP
I
o
is the average
precision for object o with data format I, while AP
M
o
denotes the average precision on the object o with
modality M. A negative error rate is associated to
an increase of AP
M
o
with regards to AP
I
o
and a posi-
tive error rate is associated to a decrease of AP
M
o
with
regards to AP
I
o
.
The intensity images I are used as a reference to
compute the error rate evolution since they provide
the best results in the literature (Blin et al., 2020).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
240
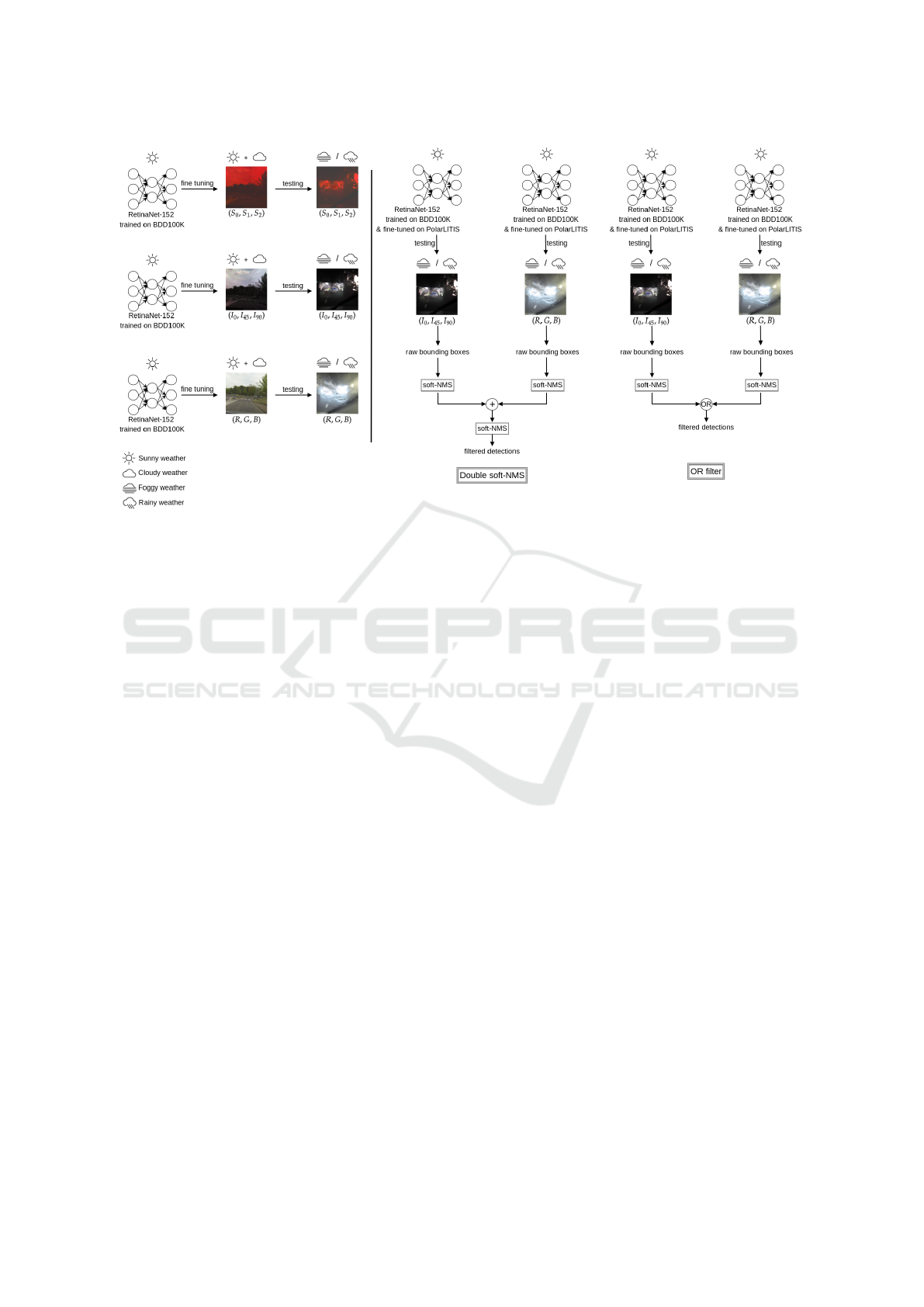
Figure 3: Experimental setup. On the left, the training process on each modality, respectively I, S and RGB is illustrated.
On the right, the two fusion schemes (Double soft-NMS filter and OR filter) are illutrated with I and RGB fusion and can be
extended to other modalities combinations.
As the PolarLITIS does not contain enough in-
stances of the class bike, they are not taken into ac-
count during the evaluation process. It is important
to remind that the architectures used for this exper-
iment are exclusively trained on good weather con-
ditions (sunny and cloudy) and tested exclusively on
adverse scenes (foggy scenes with different visibility
and rain). This pipeline enables to evaluate how po-
larimetric and color-based features vary with the visi-
bility conditions. On top of that, since the acquisitions
are made into a tunnel, the glare is an additional vis-
ibility alteration. The results of the experiments can
be found in Table 3.
As can be seen in this table, regarding the three
data formats, the polarimetric detection scores over-
come the RGB detection scores in every adverse sit-
uation. We can also notice that the Stokes images
S are more adapted to detect road objects in foggy
scenes when the fog visibility is lower than 30m with
up to 15% amelioration in the mAP. Stokes images
are also more adapted to detect objects under tropical
rain with a 30% increase in the mAP. When process-
ing scenes under fog with other visibility distances,
the intensity images are more adapted. These results
are also summarized in Figure 5 regarding fog detec-
tion. Note that even if there is a gap between the de-
tection scores corresponding to 35m and 40m visibil-
ity, it can be due to a higher number of non-ideal im-
ages (i.e. with harder objects to detect) contained in
the class 40m visibility or ideal images contained in
the 35m visibility class. Nevertheless, the increasing
curve tendency shows enhanced detection scores with
a greater visibility distance. These results give a first
intuition on the use of fusing intensities and Stokes
images in order to improve road object detection in
every situation.
Regarding the fusion schemes, when fusing inten-
sities and Stokes images using a Late fusion scheme
with the Double soft-NMS filter, it leads up to a 27%
increase of the mAP for road object detection under
fog and to a 42% increase of the mAP for road ob-
ject detection under tropical rain. The same fusion
scheme with an OR filter is less adapted since it takes
into account the false positives, which are more nu-
merous in adverse weather conditions as seen in Fig-
ure 4. It enables a slight amelioration for intensities
and Stokes images fusion with up to a 5% ameliora-
tion of the mAP for road object detection under fog
and a 2% increase of the mAP under tropical rain.
As for the polarimetric and color-based fusion, as
mentioned previously, the Late fusion scheme using
an OR filter is not adapted to fuse RGB and intensity
images since it takes the false positives into account.
The same pipeline using soft-NMS filter applied to
these two modalities, however, is not adapted to every
situation. They overcome the intensities and Stokes
images fusion in foggy scenes when the visibility is
the greatest, i.e. of 70m. The mAP in this situation is
increased by 10%.
From all these results, we can conclude that when
Road Scene Analysis: A Study of Polarimetric and Color-based Features under Various Adverse Weather Conditions
241
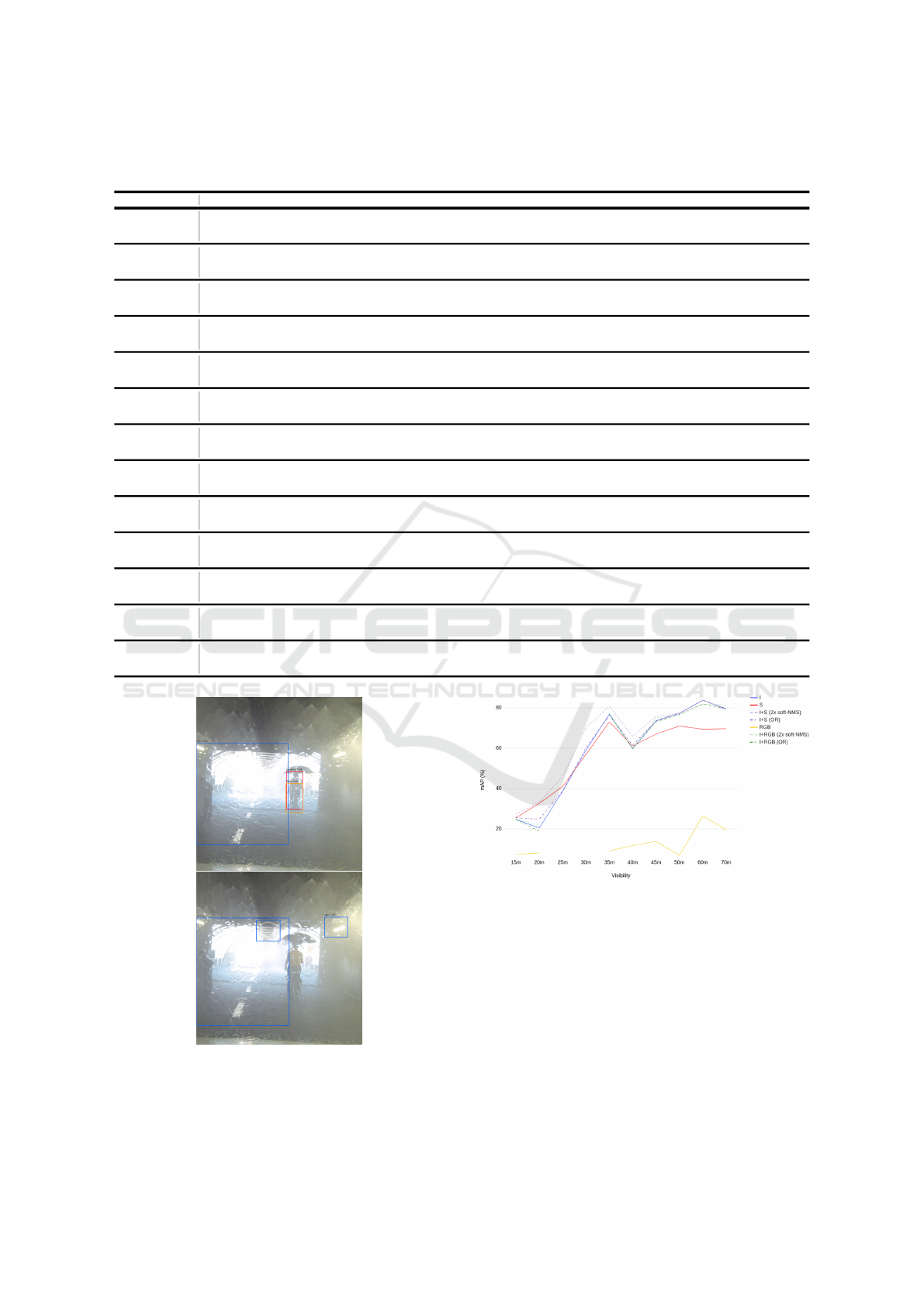
Table 3: Comparison of the detection scores. The best detection scores for each adverse weather condition are in blue. The
crosses (8) remind that the RGB images of foggy scenes with 25m and 30m visibility are not available for this experiment.
Modality Class 15m 20m 25m 30m 35m 40m 45m 50m 60m 70m rain
I
person 49.46 ± 2.6 33.96 ± 5.1 35.63 ± 2.8 48.73 ± 4.6 68.76 ± 3.2 60.61 ± 3.1 71.89 ± 2.3 74.72± 1.3 76.49± 1.5 71.97 ±2.1 73.68 ± 2.8
car 0 ± 0 6.99 ± 1.2 41.65 ± 3.7 69.21 ± 4.3 85.21 ± 5.4 58.85 ± 7.4 75.40 ± 2.7 79.83± 8.5 90.97 ±3.2 86.56 ±4.6 85.69 ± 7.3
mAP 24.73 ± 1.3 20.48 ±2.4 38.64 ± 3.2 58.97 ± 4.1 76.98 ± 2.1 59.73 ± 4.2 73.65 ± 2.2 77.28± 4.7 83.73 ±1.7 79.27 ±2.6 79.69 ± 4.1
S
person 50.64 ± 5.1 51.58 ± 8.1 44.47 ± 3.4 66.69 ± 2.5 68.88 ± 4.1 68.61 ± 4.2 70.24 ± 2.2 77.29± 3.3 68.40± 2.2 68.43 ±2.9 78.26 ± 6.1
car 0.48 ± 0.6 13.73 ± 1.9 37.59 ± 8.5 47.16 ±10.2 77.06 ± 7.2 53.51 ± 17.7 63.76 ±14.4 64.61 ± 15.6 70.35 ±7.4 70.78 ± 9.7 93.10 ± 4.4
mAP 25.56 ± 2.7 32.66 ±3.6 41.03 ± 4.6 56.92 ± 5.6 72.97 ± 4.9 61.06 ±10.2 67.00 ±8.2 70.95 ±9.4 69.37 ±4.1 69.61 ± 6.0 85.68 ±4.7
ER
S
o
person -2.3 -26.7 -13.7 -35.0 -0.4 -20.3 5.9 -10.2 34.4 12.6 -17.4
car -0.5 -7.3 7.0 71.6 55.1 13.0 47.3 75.5 228.3 117.4 -51.8
mAP -1.1 -15.3 -3.9 5.0 17.4 -3.3 25.2 27.9 88.3 46.6 -29.5
RGB
person 14.56 ± 4.9 16.27 ± 3.2 8 8 18.19 ±2.5 16.68 ± 1.8 18.80 ±3.1 12.00 ± 4.3 24.26 ± 4.3 18.22 ± 1.9 21.08 ±4.3
car 0.00 ± 0.0 0.00 ± 0.0 8 8 0.00 ±0.0 6.82 ± 0.0 8.89 ± 0.4 1.84 ±4.1 28.48 ± 0.7 20.90 ± 0.9 14.52 ± 3.5
mAP 7.28 ± 2.5 8.14 ±1.6 8 8 9.10 ±1.2 11.75 ± 0.9 13.85 ±1.7 6.90 ± 3.4 26.37 ± 2.1 19.56 ± 1.2 17.80 ± 4.3
ER
RGB
o
person 69.1 26.8 8 8 161.9 11.5 188.9 248.1 222.2 191.8 199.8
car 0.0 7.5 8 8 576.1 126.4 270.4 386.7 692.0 488.5 497.3
mAP 23.2 15.5 8 8 294.9 191.5 226.9 309.8 352.6 288.0 304.7
I + S
Double soft-NMS
person 54.14 ± 3.1 53.03 ± 7.4 45.07 ± 3.2 69.23 ± 3.1 72.62 ± 2.7 69.84 ± 4.0 76.93 ±2.1 78.99 ± 1.9 77.00 ± 1.4 74.51 ±2.5 83.24 ± 2.8
car 0.45 ± 0.6 13.60 ± 2.1 46.85 ± 5.3 71.19 ± 4.4 88.85 ±2.4 61.70 ± 10.5 74.58 ± 4.3 75.40 ± 11.5 90.28 ± 3.8 84.59 ±5.3 93.35 ± 3.7
mAP 27.30 ± 1.7 33.31 ±3.4 45.96 ± 3.3 70.21 ± 3.4 80.74 ± 2.5 65.77 ± 5.5 75.76 ±3.1 77.19 ± 6.3 83.64 ± 2.3 79.55 ±3.6 88.29 ± 2.3
ER
I+S (2× soft-NMS)
o
person -10.3 -28.9 -14.7 -40.0 -12.4 -23.4 -17.9 -16.9 -2.2 -9.1 -36.3
car -0.5 -7.1 -8.9 -6.4 -24.6 -6.9 3.33 22.0 7.6 14.6 -53.5
mAP -3.4 -16.1 -11.9 -27.4 -16.3 -15.0 -8.0 0.4 0.6 -1.4 -42.3
I + S
OR filter
person 51.05 ± 2.6 41.25 ± 5.5 37.49 ± 3.3 50.25 ± 4.9 69.10 ± 3.0 63.97 ± 1.7 72.30 ±2.4 75.48 ± 1.8 76.81 ± 1.4 72.72 ±2.2 73.61 ± 2.9
car 0.08 ± 0.2 8.34 ± 2.7 40.30 ± 5.6 70.08 ± 3.3 83.42 ± 4.4 59.04 ± 7.1 74.66 ±3.7 78.84 ± 7.9 90.82 ± 3.3 86.40 ±4.0 86.64 ± 6.6
mAP 25.56 ± 1.3 24.79 ±2.4 38.90 ± 3.5 60.17 ± 3.8 76.26 ± 1.1 61.51 ± 4.0 73.48 ±2.5 77.16 ± 4.3 83.82 ± 1.6 79.56 ±2.4 80.13 ± 3.7
ER
I+S (OR filter)
o
person -3.1 -11.0 -2.9 -3.0 -1.1 -8.5 -1.5 -3.0 -1.4 -2.7 0.3
car -0.1 -8.2 2.3 -2.8 12.1 -0.5 3.0 4.9 1.7 1.2 -6.6
mAP -1.1 -5.4 -0.4 -2.9 3.1 -4.4 0.6 0.5 -0.6 -1.4 -2.2
I+RGB
Double soft-NMS
person 49.65 ± 2.7 38.06 ± 3.8 8 8 69.07 ±4.5 61.08 ± 3.1 72.94 ±2.6 75.10 ± 1.5 76.08 ± 3.1 72.83 ± 2.5 72.95 ±2.7
car 0.00 ± 0.0 5.49 ± 2.0 8 8 83.64 ±5.2 59.26 ± 6.26 76.80 ± 2.4 78.39 ± 9.7 87.59 ± 3.6 89.95 ±3.2 77.23 ± 7.5
mAP 24.83 ± 1.4 21.77 ±1.5 8 8 76.35 ± 2.5 60.17 ± 3.5 74.87 ± 2.2 76.74 ±5.4 81.84 ±3.2 81.39 ± 2.6 75.09 ±3.6
ER
I+RGB (2× soft-NMS)
o
person -0.4 -6.2 8 8 -1.0 -1.2 -3.7 -1.5 1.7 -3.1 2.8
car 0.0 1.6 8 8 10.6 -1.0 -5.7 7.1 37.4 -25.2 59.1
mAP -0.1 -1.6 8 8 2.7 -1.1 -4.6 2.4 11.6 -10.2 22.6
I+RGB
OR filter
person 49.58 ± 2.6 31.34 ± 5.8 8 8 68.74 ±3.3 60.26 ± 3.1 71.35 ±1.9 74.19 ± 2.0 73.89 ± 1.5 72.43 ± 2.2 73.72 ±2.8
car 0.00 ± 0.0 6.29 ± 1.9 8 8 84.94 ±5.5 59.10 ± 7.4 74.88 ±2.8 79.12 ± 9.1 89.89 ± 3.0 86.54 ±4.6 81.72 ± 7.2
mAP 24.79 ± 1.3 18.82 ±3.0 8 8 76.84 ± 2.0 59.68 ± 4.2 73.12 ± 1.8 76.65 ±5.5 81.89 ±1.8 79.49 ± 2.6 77.72 ±3.9
ER
I+RGB (OR filter)
o
person -0.2 -4.0 8 8 0.1 0.9 1.9 2.1 11.1 -1.6 -0.2
car 0.0 0.8 8 8 18.3 -0.6 2.1 3.5 12.0 0.1 27.7
mAP -0.1 2.1 8 8 0.6 0.1 2.0 2.8 11.3 -1.1 9.7
Figure 4: Examples of false positives detection in adverse
weather conditions. Blue red and orange bounding boxes
respectively denotes car, person and bike detection.
Figure 5: Evolution of the mAP in foggy scenes while vary-
ing the visibility distance. I, S and the RGB scores are re-
spectively in blue, red and yellow (full lines). The fusion
scores of I and S are respectively in pale and dark purple for
the Double soft-NMS and the OR filters (dashed lines). The
fusion scores of I and RGB are respectively in pale and dark
green for the Double soft-NMS and the OR filters (dashed
lines).
the visibility is very low, as it is the case in very dense
fog and tropical rain, the Stokes and intensity im-
ages fusion provide the best results. The color-based
and polarimetric fusion is beneficial in adverse road
scenes with a better visibility, such as light fog. How-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
242

Figure 6: Detection results in several adverse weather conditions. From top to bottom: tropical rain and fog with respectively
35m and 60m visibility. From left to right: I, S, RGB, I +S (Double soft-NMS), I +S (OR filter), I+RGB (Double soft-NMS)
and I+RGB (OR filter). Bounding boxes in green, blue, red and orange denote respectively the ground truth, car, person and
bike detection.
ever, as can be seen in Figure 5, when the visibility
is lower than 30m, the polarimetric features learnt in
good weather conditions are not able to detect effi-
ciently all road objects in adverse scenes. This limi-
tation could be overcame by including adverse situa-
tions in the training process. Despite this limitation,
the experimental results show that under tropical rain
and under fog from 30m visibility, polarimetric fea-
tures are a real added value to enhance road objects
detection. Moreover, as it can be seen in Figure 2, po-
larimetric features are more robust to the glare and to
drops or veils of water on the windshield, causing de-
formation and loss of information in color-based im-
ages. Overall, polarimetric features are more adapted
than color-based features to characterize objects in
unexpected visibility alterations, as it is illustrated in
Figure 6.
6 CONCLUSION AND
PERSPECTIVES
In this work, polarimetric features, including polari-
metric intensities and Stokes parameters, prove to be
a real added value to enhance object detection in a
wide range of adverse weather conditions. The exper-
imental results demonstrate that, unlike color-based
features, polarimetric features are invariant to the vis-
ibility variations induced by fog and rain or the glare.
This property implies that the features learnt in good
weather conditions are still valid to detect road ob-
jects in adverse weather. Using a well chosen fu-
sion scheme, polarimetric intensity images combined
with Stokes images lead up to a 27% increase of road
object detection under fog and to a 42% increase of
road object detection under tropical rain. The combi-
nation of polarimetric and color-based features, how-
ever, finds its utility to analyze road scenes when the
visibility gets better. Overall, polarimetric features
are more robust than color-based ones to unexpected
visibility changes.
It is important to note that, the polarimetric fea-
tures learnt in good weather conditions show limits to
efficiently describe a road scene when the visibility is
very low. This limitation should be palliated by in-
cluding polarimetric road scenes in adverse weather
conditions in the training process to increase road ob-
ject detection in low visibility. This work also aims in
a close future to repeat the experiments on real road
scenes in several adverse weather conditions such as
hail or snow.
Road Scene Analysis: A Study of Polarimetric and Color-based Features under Various Adverse Weather Conditions
243

ACKNOWLEDGEMENTS
This work is supported by the ICUB project 2017
ANR program : ANR-17-CE22-0011.
REFERENCES
Ainouz, S., Morel, O., Fofi, D., Mosaddegh, S., and
Bensrhair, A. (2013). Adaptive processing of cata-
dioptric images using polarization imaging: towards
a pola-catadioptric model. Optical engineering,
52(3):037001.
Aldibaja, M., Suganuma, N., and Yoneda, K. (2016). Im-
proving localization accuracy for autonomous driving
in snow-rain environments. In 2016 IEEE/SICE In-
ternational Symposium on System Integration (SII),
pages 212–217. IEEE.
Bass, M., Van Stryland, E. W., Williams, D. R., and
Wolfe, W. L. (1995). Handbook of optics, volume 2.
McGraw-Hill New York.
Bijelic, M., Gruber, T., Mannan, F., Kraus, F., Ritter, W.,
Dietmayer, K., and Heide, F. (2020). Seeing through
fog without seeing fog: Deep multimodal sensor fu-
sion in unseen adverse weather. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 11682–11692.
Bijelic, M., Gruber, T., and Ritter, W. (2018). Benchmark-
ing image sensors under adverse weather conditions
for autonomous driving. In 2018 IEEE Intelligent Ve-
hicles Symposium (IV), pages 1773–1779. IEEE.
Blin, R., Ainouz, S., Canu, S., and Meriaudeau, F. (2019).
Road scenes analysis in adverse weather conditions by
polarization-encoded images and adapted deep learn-
ing. In 2019 IEEE Intelligent Transportation Systems
Conference (ITSC), pages 27–32. IEEE.
Blin, R., Ainouz, S., Canu, S., and Meriaudeau, F. (2020).
A new multimodal rgb and polarimetric image dataset
for road scenes analysis. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops, pages 216–217.
Bodla, N., Singh, B., Chellappa, R., and Davis, L. S. (2017).
Soft-nms–improving object detection with one line of
code. In Proceedings of the IEEE international con-
ference on computer vision, pages 5561–5569.
Fan, W., Ainouz, S., Meriaudeau, F., and Bensrhair, A.
(2018). Polarization-based car detection. In 2018 25th
IEEE International Conference on Image Processing
(ICIP), pages 3069–3073. IEEE.
Felzenszwalb, P., McAllester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
part model. In 2008 IEEE Conference on Computer
Vision and Pattern Recognition, pages 1–8. IEEE.
Feng, D., Haase-Schütz, C., Rosenbaum, L., Hertlein,
H., Glaeser, C., Timm, F., Wiesbeck, W., and Diet-
mayer, K. (2020). Deep multi-modal object detection
and semantic segmentation for autonomous driving:
Datasets, methods, and challenges. IEEE Transac-
tions on Intelligent Transportation Systems.
Gu, S., Lu, T., Zhang, Y., Alvarez, J. M., Yang, J., and
Kong, H. (2018). 3-d lidar+ monocular camera:
An inverse-depth-induced fusion framework for urban
road detection. IEEE Transactions on Intelligent Ve-
hicles, 3(3):351–360.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Dollár, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Major, B., Fontijne, D., Ansari, A., Teja Sukhavasi, R.,
Gowaikar, R., Hamilton, M., Lee, S., Grzechnik,
S., and Subramanian, S. (2019). Vehicle detec-
tion with automotive radar using deep learning on
range-azimuth-doppler tensors. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion (ICCV) Workshops.
Nie, J., Yan, J., Yin, H., Ren, L., and Meng, Q. (2020). A
multimodality fusion deep neural network and safety
test strategy for intelligent vehicles. IEEE Transac-
tions on Intelligent Vehicles, pages 1–1.
Pinchon, N., Cassignol, O., Nicolas, A., Bernardin, F.,
Leduc, P., Tarel, J.-P., Brémond, R., Bercier, E., and
Brunet, J. (2018). All-weather vision for automotive
safety: which spectral band? In International Forum
on Advanced Microsystems for Automotive Applica-
tions, pages 3–15. Springer.
Rashed, H., Ramzy, M., Vaquero, V., El Sallab, A., Sistu,
G., and Yogamani, S. (2019). Fusemodnet: Real-time
camera and lidar based moving object detection for ro-
bust low-light autonomous driving. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision (ICCV) Workshops.
Yu, F., Chen, H., Wang, X., Xian, W., Chen, Y., Liu, F.,
Madhavan, V., and Darrell, T. (2020). Bdd100k: A
diverse driving dataset for heterogeneous multitask
learning. In Proceedings of the IEEE/CVF conference
on computer vision and pattern recognition, pages
2636–2645.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
244
