
Data Acquisition, Conditioning and Processing System for a
Wearable-based Biostimulation
Leonardo Sestrem
a
, Raul Kaizer
b
, Jo
˜
ao Gonc¸alves
c
, Paulo Leit
˜
ao
d
, Jo
˜
ao Paulo Teixeira
e
,
Jos
´
e Lima
f
, Tiago Franco
g
and Jos
´
e Augusto Carvalho
h
Research Center in Digitalization and Intelligent Robotics (CeDRI), Instituto Polit
´
ecnico de Braganc¸a,
Campus de Santa Apol
´
onia, 5300-253 Braganc¸a, Portugal
Keywords:
Wearable Bioestimulation, Data Acquisition, Electromyography, Artificial Intelligence.
Abstract:
Data acquisition by electromyography, as well as the muscle stimulation, has become more accessible with
the new developments in the wearable technology and medicine. In fact, for treatments, games or sports, it
is possible to find examples of the use of muscle signals to analyse specific aspects related, e.g., to disease,
injuries or movement impulses. However, these systems are usually expensive, does not integrate data ac-
quisition with the muscle stimulation and does not exhibit an adaptive control behaviour that consider the
pathology and the patient response. This paper presents a wearable system that integrates the signal acquisi-
tion and the electrostimulation using dry thin-film titanium-based electrodes. The acquired data is transmitted
to a mobile application running on a smartphone by using Bluetooth Low Energy (BLE) technology, where it
is analysed by employing artificial intelligence algorithms to provide customised treatments for each patient
profile and type of pathology, and taking into consideration the feedback of the acquired electromyography
signal. The acquired patient’s data is also stored in a secure cloud database to support the physician to analyse
and follow-up the clinical results from the rehabilitation process.
1 INTRODUCTION
In 2030, according to the World Health Organisation,
it is expected that the number of people aged 60 years
and older will be approximately 1.4 billion. With the
coming of age, movement difficulties and patholo-
gies, such as arthritis, become frequent, consequently
increasing the workload of the physiotherapists. As
these pathologies make difficult, expensive and bur-
densome to constantly leave home to receive the treat-
ment, cheap and easy-to-use alternatives must be de-
veloped to support the home healthcare.
One of the rehabilitation treatment methods makes
use of the electrostimulation, namely the Functional
Electrical Stimulation (FES), which uses low fre-
a
https://orcid.org/0000-0002-9344-3075
b
https://orcid.org/0000-0001-9273-2257
c
https://orcid.org/0000-0002-3502-7444
d
https://orcid.org/0000-0002-2151-7944
e
https://orcid.org/0000-0002-6679-5702
f
https://orcid.org/0000-0001-7902-1207
g
https://orcid.org/0000-0001-8574-4380
h
https://orcid.org/0000-0002-6074-8112
quency electrical currents to provoke the muscles con-
traction, increasing the muscle activity, along with ex-
ercises, contributing significantly to improve the abil-
ity to carry out functional activities. Aiming to sim-
plify the everyday activities and allow its remote ex-
ecution, the functions required to carry out the treat-
ment may be implemented in a wearable system.
Wearable systems can be used by patients to per-
form health treatments and the continuous monitoring
locally at home, specially not requiring other devices
like screens and peripherals. In a wearable system, the
collected muscle data by biosignals measurements,
e.g., cardiac, neurological and musculoskeletal, are
biological samples in time and space of biological
events. The musculoskeletal signal, or the myoelec-
tric signal, is a result of the bioelectricity phenomenon
that occurs when a potential difference exists between
the internal and external sides of the muscle cell mem-
brane (Ferraz et al., 2021).
The eletromyography (EMG) is the electrodiag-
nostic medicine technique used to monitor the electri-
cal activity produced by skeletal muscles (Robertson
et al., 2013). The usage of electrodes placed on the
skin to acquire this type of signal is known as surface
Sestrem, L., Kaizer, R., Gonçalves, J., Leitão, P., Teixeira, J., Lima, J., Franco, T. and Carvalho, J.
Data Acquisition, Conditioning and Processing System for a Wearable-based Biostimulation.
DOI: 10.5220/0011002300003123
In Proceedings of the 15th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2022) - Volume 1: BIODEVICES, pages 223-230
ISBN: 978-989-758-552-4; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
223

electromyography (sEMG), and presents the advan-
tage of being a non-invasive EMG technology that is
capable of monitoring the nerve-muscle interactions
signals (Ergeneci et al., 2018a). The disadvantages of
sEMG are the complexity to obtain accurate data sig-
nals and the difficulty of electrostimulation, namely
the need of the exact positioning of the electrode, the
concern with noisy electrical environments and the
patient biological conditions (Rodrigues et al., 2020).
The commercial wearable systems usually present
the EMG signal acquisition or electrostimulation
functions separately, due to the complexity and dif-
ficulty to integrate without compromising the effi-
ciency, signal accuracy and comfort. To address
these requirements, the employed hardware needs to
present a greater and reliable performance, increasing
the solution investment.
Having this in mind, the paper describes the devel-
opment of a wearable electroestimulation system to
support the remote and autonomous rehabilitation of
the vastus medialis muscle in elderly people. The de-
veloped solution uses dry thin-film electrodes on the
skin surface to acquire the EMG signal, and consid-
ers the electrostimulation system integrated with the
signal acquisition and conditioning, stimulating the
muscle during a rehabilitation session according to an
adaptive control based on the biofeedback from the
EMG biosignals and artificial intelligence (AI) algo-
rithms. A continuous remote monitoring system al-
lows the patient to get the treatment sessions at home,
with the gathered biofeedback data being transmitted
through Bluetooth Low Energy (BLE) technology to
a smartphone which serves as mediator to the cloud,
where the physician can visualise the results of the
sessions and prescribe new sessions.
The rest of the paper is organised as follows: Sec-
tion 2 presents the related work and Section 3 de-
scribes the proposed architecture for the signal ac-
quisition, conditioning and processing system for the
wearable-based biostimulation. Section 4 presents
the implementation of the proposed system and Sec-
tion 5 analyses the preliminary experimental results.
Finally, Section 6 rounds up the paper with the con-
clusions and points out the future work.
2 RELATED WORK
The wearable electronic technology has revolu-
tionised the traditional medical diagnosis methods as
well as current medical devices by providing conve-
nient, remote, wearable and portable functions (Lou
et al., 2020). The progress in electrical measure-
ments and electronics has enabled the development
of wearable medical systems, which have real-time
monitoring capabilities, flexibility, easy mobility, and
compatibility with the data and signal processing
fields (Chun et al., 2019; Trung and Lee, 2016).
There is a tendency to include extra functionali-
ties in the wearable medical systems aiming the in-
tegration with other systems, e.g., non-invasive real-
time monitoring and analysis of vital human param-
eters (Lou et al., 2020). Current solutions rely on
medical monitoring systems including wearable sen-
sors, wireless communication modules, displays, and
efficient power supply for improved performance and
reliable data collection (Koh et al., 2016). The com-
bination of intelligent sensors and algorithms can not
only provide these extra functions to the system but
also offers processed data and independent work-
ing mode with self-healing, self-evaluation, and self-
calibration features (Lou et al., 2020).
Several commercial solutions for wearable sys-
tems based on sEMG data acquisition are currently
available, namely Biometrics DataLOG (Biometrics
Ltd, 2021), Bitalino (Da Silva et al., 2014) and Delsys
Trigno Lab (Delsys, 2021), providing a reliable and
accurate EMG signal acquisition, but they are usually
expensive and mainly focused in the signal acquisi-
tion functions. In the same manner, several academic
works are available for this purpose, e.g., (Park et al.,
2021; Zhu et al., 2021; Ergeneci et al., 2018a; Chen
et al., 2017; Li et al., 2021). In spite of their ben-
efits, mainly focused in the signal acquisition, they
are missing important features for the development of
reusable wearable biostimulation based on the EMG
signal acquisition. As examples, the solutions pro-
posed by (Park et al., 2021; Biometrics Ltd, 2021)
present a lack of wearability that do not allow suffi-
cient motion freedom and others do not use wireless
data transmission which are not suitable for general
use outside the laboratory environments (see (Park
et al., 2021; Chen et al., 2017)). In the same mannner,
e.g., the setup proposed in (Ergeneci et al., 2018a)
uses the Wi-Fi technology to stream the acquired data,
which in spite of its suitability for real-time monitor-
ing, the energy consumption is a drawback to wear-
able systems, being required a low power solution to
an extensive treatment period.
The use of wet electrodes may cause allergic reac-
tions and skin irritation (Fayyaz Shahandashti et al.,
2019), and the electrolytic conductive gel that helps to
reduce the skin-electrode impedance, dehydrate over
time, hence worsening the conductivity (Ergeneci
et al., 2018a). Another disadvantage of wet electrodes
is that they need to be changed every few or every ses-
sion while dry electrodes can be reused for many ses-
sions depending on the material that it is made (Peng
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
224

et al., 2016). Several works, e.g., (Zhu et al., 2021;
Park et al., 2021; Li et al., 2021), use wet/disposable
electrodes, which do not offer reusability.
Although dry electrodes do not require the need to
use conductive gel to work properly and are reusable,
they present higher skin-electrode impedance than the
wet ones, which may increase the biosignal noise and
demand higher voltage to stimulate the muscle. Some
solutions found in the literature employ dry sensors
that use high-cost materials in their composition such
as gold, offering a signal quality many times superior
to those obtained with the wet electrodes, but increas-
ing the price of the system (Ergeneci et al., 2018b).
The aforementioned solutions are usually based
on wearables that consider wet electrodes and only
present the acquisition function and do not include
stimulation to aid the muscle rehabilitation. Another
functionality that is usually missing in the stimulation
systems is the use of AI to assist the physician in the
diagnosis and even to adjust the treatment protocol
during an electrostimulation session according to the
pathology and the patient’s response.
3 BIOSTIMULATION SYSTEM
ARCHITECTURE
The solution proposed in this work was designed to
accomplish the requirements for the rehabilitation of
the vastus medialis muscle, particularly addressing
the elderly people.
3.1 System Requirements
The wearable healthcare systems need to be comfort-
able to wear, and an ease adaptation with skin or
human body surface, with compatibility, durability,
and abrasion resistance (Lou et al., 2020). In addi-
tion, these healthcare systems can not merely improve
the health status but also enhance the development of
medical technology allowing to detect an emergency
situation and preventing accidents (Park et al., 2021).
When designing the electrodes, the shape, size
and material are the first aspects to take into ac-
count (Di Flumeri et al., 2019), influencing the price,
comfort, signal quality, contact stability and biocom-
patibility. The material must present unchanged char-
acteristics for long periods so the electrodes do not
have to be changed. This guarantees the right connec-
tion and easy use for elderly people in their homes.
The electrodes must also be designed in a way that
allows them to be washed together with the wearable
without having their position changed and avoiding
the risk of compromising the connection stability. To
avoid damages from the contact with sweat and other
body fluids, the corrosion resistant materials must be
used but they must be materials that do not show sig-
nificant changes in their electrical properties when
in contact with liquids (body fluids) (Tallgren et al.,
2005) to not hurt the skin with the stimulation signals.
There is the concern with electric damaging the
skin while applying the FES system through dry elec-
trodes because of the body fluids. Thus, the stimula-
tion system must be designed to be capable of stimu-
late the muscle with the lowest possible voltage. To
achieve this, biphasic square wave pulses must be
used and manipulated in terms of amplitude, dura-
tion and frequency.While maintaining the frequency
between 10 and 100 Hz and the pulse duration lower
than 999 µs, the amplitude is subjective as each treat-
ment and human body requires a different value. For
this reason, implementing biphasic pulses guarantees
to reduce the tissue damage and irritation provoked by
the stimulation in long periods of time (Tallgren et al.,
2005), and helps to avoid the muscle’s premature fa-
tigue (Lynch and Popovic, 2008).
To identify the original responses of the muscle
and compare to the current responses, the sampling
rate for the acquisition of the skeletal muscle signals
must be at least 1 kHz on a frequency bandwidth of
18 − 480 Hz. The correct acquisition of signals from
0.8mV requires the use a resolution of 12 bits in the
conversion from analogue to digital.
In terms of investment, the developed system
should provide a low-cost and competitive price when
compared to commercial solutions, e.g., (Biometrics
Ltd, 2021), and the signal acquisition and stimulation
functions should be completely integrated. In fact,
the rehabilitation routines should be adapted by AI al-
gorithms according to the biofeedback that takes into
account the patient profile and the specific injury.
3.2 System Architecture
The proposed system architecture, illustrated in Fig-
ure 1, ensures the adequate acquisition and condition-
ing of the EMG signal (e.g., amplification, filtering
and conversion) to support the monitoring and the
stimulation of the muscle, as well as the transmission
of the acquired data to the mobile application running
in the smartphone, and later to a secure cloud where
the physician can follow-up the clinical results. The
design of this innovative biostimulation system allows
to reach a modular, scalable and low cost solution.
The wearable system comprises a pair of dry elec-
trodes to acquire the EMG signal and to perform the
FES, that are placed in the patient skin near the vastus
medialis muscle. The first module, i.e. data acquisi-
Data Acquisition, Conditioning and Processing System for a Wearable-based Biostimulation
225
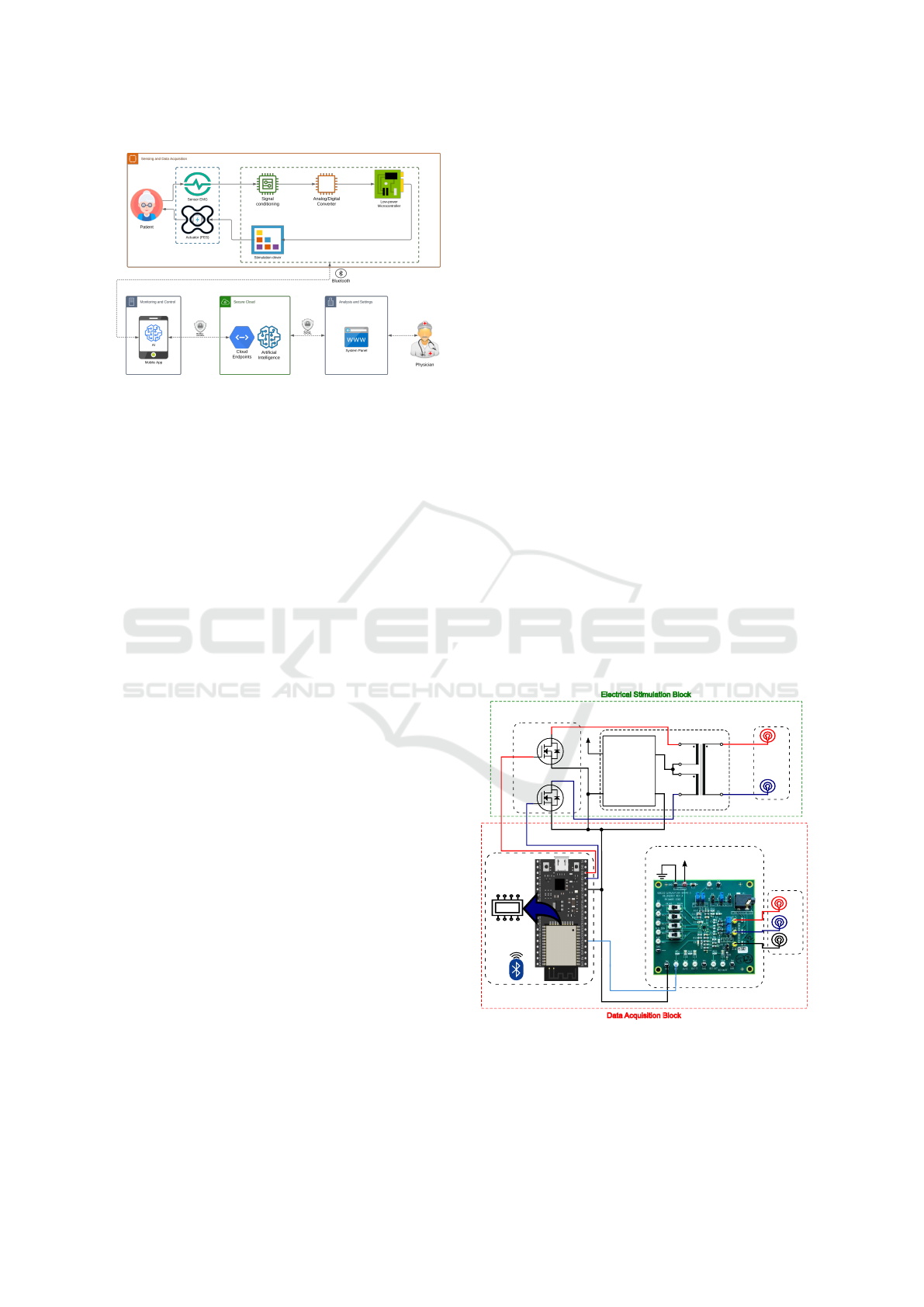
Figure 1: System architecture focusing the acquisition, sig-
nal conditioning and stimulation system.
tion block, is responsible to the implementation of the
real-time EMG data acquisition functions, namely to
collect the muscular information through EMG sen-
sors in each 1 ms. The collected electrode signals will
be forward to a signal conditioning block that ampli-
fies the signal to a higher intensity that can be trans-
mitted to avoid losses and to filter the signal to atten-
uate undesired frequencies and noise. Next, the EMG
signal is converted from analogue to digital by using
an Analog/Digital Converter (ADC), and finally trans-
mitted to a microcontroller that will store and process
locally the data by executing the control rules to im-
plement the stimulation function. These control rules
are defined according to the treatment protocol previ-
ously established by the physician, and triggered ac-
cording to the biofeedback from the EMG signal (and
in this way closing the loop between the signal acqui-
sition with the stimulation functions).
The commands for the muscle stimulation, pro-
vided by the microcontroller, are forward to the elet-
rical stimulation driver that is responsible to set the
amplitude and frequency of the electrical signals in-
jected in the FES electrodes. Closing the loop, the
acquisition module will measure the EMG signal that
corresponds to the muscle stimulus occasioned by the
current flow.
The system also comprises an user-friendly mo-
bile application running in a smartphone, which in-
terface enables the patient to access the clinical data
and medical plan stipulated by the physician. With
this, the patient is able to start, stop and interrupt the
treatment any time, and visualise the EMG and FES
signals in real-time. For this purpose, the acquired
data from the wearable is transmitted to the mobile
application through the BLE wireless protocol, which
provides low power consumption and implementa-
tion complexity. A microservice architecture capa-
ble of communicating with the wearable system to
perform treatments at home was developed, ensuring
the data security and privacy, mainly using a Single-
Sign On (SSO) authentication service (Franco et al.,
2021). The data collected during the session and the
report provided by the patient at the end of the session
are transmitted to a secure cloud database, where the
physician can perform the clinical follow-up.
Another important module in this system is the use
of AI algorithms running in the cloud that allows to
analyse the collected data from the treatment session
(and also the previous historical data for that and oth-
ers patients) and derive new prescriptions for the next
treatment sessions according to the patient’s profile
and response, and type of pathology.
4 DEVELOPMENT OF THE
BIOSTIMULATION SYSTEM
Considering the established requirements and the de-
signed system architecture, an integrated biostimu-
lation prototype system was developed as illustrated
in Figure 2 (note that the mobile app and the secure
cloud including the AI algorithms are not detailed in
this paper). The solution comprises the data acqui-
sition and electrical stimulation modules that oper-
ate integrated and in real-time, which means that the
stimulus are derived from the feedback from the col-
lected EMG signal, and this signal is the response of
the muscle to the stimulation.
VB 0.5/2/6
+3.3 V
Ref
+
-
EMG
Sensor
Signal Conditioning
(EBZ-AD8233)
Microcontroller
(ESP32)
BLE
+
-
Electrodes
Amplifying
Block
Conditioning
Block
Step-up
DC/DC
Converter
MT 3608
V
IN
V
OUT
+ +
--
+3.3 V
30N06L
ADC
12 Bits
Resolution
Electrical Stimulation Block
Data Acquisition Block
Figure 2: Data acquisition and stimulation practical setup.
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
226

4.1 Data Acquisition System
The signal conditioning stage employs the
AD8233CB-EBZ board that contains an AD8233
heart rate monitor front end. Originally, the board
was designed to acquire ECG signals with a fre-
quency bandwidth of 7−25 Hz, but to measure EMG
signals, a modification in the High-pass filter (HPF)
and Low-pass filter (LPF) circuits were necessary
to be performed to achieve a new bandwidth of
15 − 480 Hz. This allows to acquire and amplify the
skeletal muscle signals since the biosignals have low
amplitude levels, ranging from µV to a few mV.
The ESP32 Devkit V1 was used as microcon-
troller due to their low-cost, wireless communication
(BLE and Wi-Fi) and capability to operate with dual
core. The ESP32 has an ADC with 12 bits of reso-
lution, allowing to address the system requirements,
permitting to convert analogue values from 0.8 mV,
while e.g., the Arduino only has 10 bits of resolution
that only allows to measure a signal from 5 mV. In
spite of offering the possibility to communicate using
Wi-Fi and BLE wireless protocols, the selection was
to use BLE due to the low-power consumption that
ensures a longer battery autonomy (note that Wi-Fi is
widely employed due to its availability and capacity
of streaming but in these applications, the autonomy
of the battery is a strong requirement). Furthermore,
the dual-core functionality provided by the ESP32 is
crucial to guarantee that the acquisition and stimula-
tion can be done separately without delays and inter-
ference between the two tasks.
The acquisition system operates with a sampling
rate of 1 kHz, respecting the Nyquist theorem, to
avoid aliasing. The acquired data is transmitted to the
mobile application each 200 ms due to the limitation
of the BLE protocol to receive a maximum number of
500 bytes; each transmitted sample occupies 2 bytes,
which means that each transmitted package comprise
400 bytes. Finally, the collected data is stored in the
cloud database to be available to the physician for
clinical follow-up and to the AI algorithms for opti-
misation of the treatment for the next sessions.
4.2 Electrical Stimulation Module
The electrical stimulation block is responsible to gen-
erate the muscle stimulus by applying electrical sig-
nals according to the system commands. The com-
mands are two pulses, defined in duration, amplitude
and frequency, and produced by the microcontroller
to compose the biphasic waveform, necessary to ap-
ply the stimulation. The conditioning block receives
the pulses and switch them by using a pair of MOS-
FETs, in this case 30N06L that were chosen due to
their low drain-source resistance (R
DS
= 0.035) that
allows a higher switching speed.
The amplification power block generates the
biphasic wave form and increases the output voltage
of the stimulation signal. This stage is composed by
a MT 3608 step-up converter with a 1 : 20 conversion
ratio, and a transformer VB 0.5/2/6 with a 6 : 230
transformation ratio. The boost converter was cho-
sen due to its low cost and amplification rate, and the
transformer due to its small size (22/22.7/19 mm)
and the disposition of the pins, once it has four pins in
the low voltage side which enables the generation of
the biphasic pulse while the signal is amplified. These
parameters are defined for the treatment applied to the
patient, established by the physician and the AI algo-
rithms.
The pulses are applied to both inputs of the low
voltage side of the transformer, and the middle points
are powered by a constant voltage amplified by the
step-up converter to reach a higher output rate. This
configuration allows to generate the desired pulse
form and reach the necessary amplitude voltage to ful-
fil the stimulus signal. The output amplitude is con-
trolled by using the Pulse Width Modulation (PWM)
technique where the pulses are adjusted in duration
and period, being the amplitude directly proportional
to the pulse duration.
5 EXPERIMENTAL RESULTS
Several experimental tests were performed in the de-
veloped prototype solution to verify the accomplish-
ment with the established requirements. The acquisi-
tion experiments were developed with a healthy per-
son, maintaining the same motion pattern during 3
seconds to start the movement, 4 seconds in the max-
imum muscle contraction and 3 seconds to return to
the rest. The stimulation was tested in a load to sim-
ulate the skin impedance, being able to evaluate the
generated waveform and the module performance.
5.1 Acquisition of the EMG Signal
In order to evaluate the proposed solution, the exper-
imental tests were performed using wet (Ag-AgCl)
and two distinct types of dry (Ti and TiCu) electrodes.
As shown in Figures 3 and 4, it is possible to note that
the signals acquired using the Ti film and the poly-
lactic acid substrate (PLA) exhibit no saturation in
the readings and the energy levels were significantly
close to those obtained with the wet sensors, present-
ing a signal-to-noise ratio (SNR) of 17.57 dB while
Data Acquisition, Conditioning and Processing System for a Wearable-based Biostimulation
227
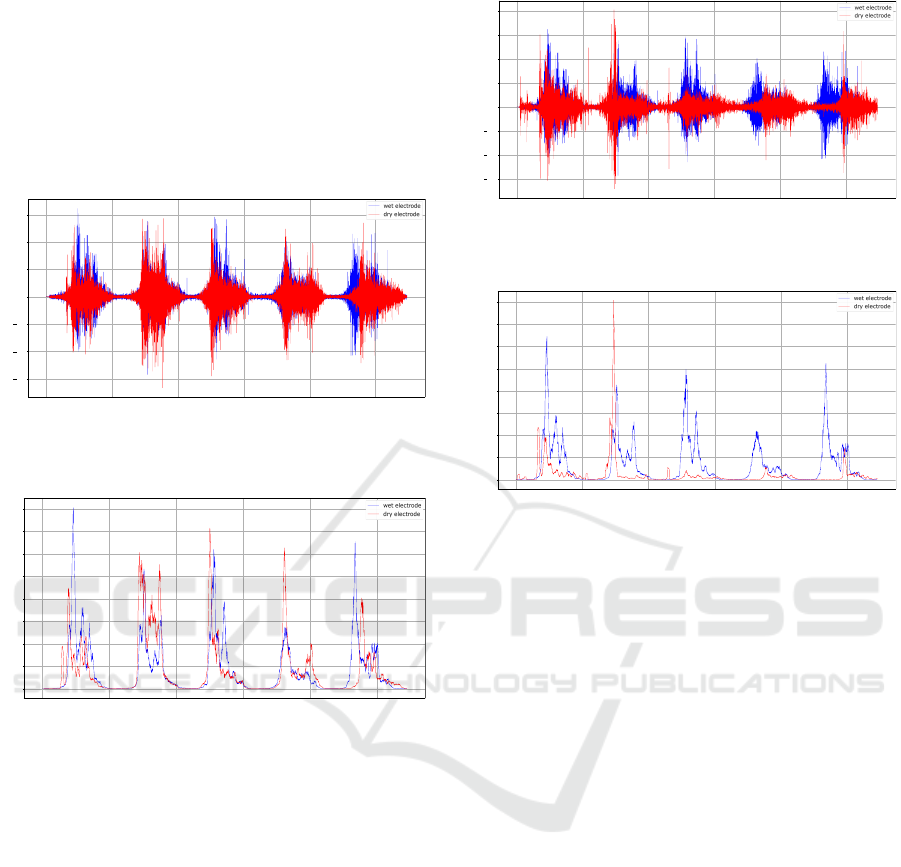
the disposable ones provided a value of 18.15 dB.
This shows that the Ti dry electrode is competitive
to be used in such solutions since the energy levels
were close to those recorded by the Ag-AgCl elec-
trode, simplifying the algorithm to detect the amount
and moment of the muscle contractions, as well as to
avoid the use of gel that can cause skin irritation and
reduces the number of generated waste.
0 10000 20000 30000 40000 50000
Time (ms)
1.5
1.0
0.5
0.0
0.5
1.0
1.5
Amplitude (V)
EMG filtered
Figure 3: Analysis of filtered reading with Ti and wet elec-
trodes signals.
0 10000 20000 30000 40000 50000
Time (ms)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
Amplitude (V)
Signal Energy
Figure 4: Analysis of the signal energy of Ti and wet elec-
trodes.
In therms of the TiCu electrodes, the reached sig-
nal quality is 17.85 dB, which is higher than the one
provided by the Ti film 17.57 dB, as illustrated in
Figure 5. However, the energy levels, illustrated in
Figure 6, were lower compared to the other types of
tested sensors which ends up hindering the detection
of muscle contractions and the diagnosis of the pa-
tient. Therefore, the presence of copper in the sensor
improves the quality of the acquired signal by pro-
viding an acquisition with a more reasonable level of
noise. However, the presence of this material in the
film makes the electrode much more susceptible to
oxidation and can cause irritation in case of a pro-
longed period of time in contact with the skin.
Another critical factor observed during the tests
was the electromagnetic noise in the environment,
which affects the measurements and turns the system
inaccurate. In order to mitigate this effect, it was em-
ployed the shielding in the circuit container to isolate
the electronics of the environment noise, attenuating
0 10000 20000 30000 40000 50000
Time (ms)
1.5
1.0
0.5
0.0
0.5
1.0
1.5
2.0
Amplitude (V)
EMG filtered
Figure 5: Analysis of filtered reading with TiCu and wet
electrodes.
0 10000 20000 30000 40000 50000
Time (ms)
0.00
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
Amplitude (V)
Signal Energy
Figure 6: Analysis of the signal energy of TiCu and wet
electrodes.
possible magnetic coupling and high-frequency inter-
ference. Protecting the circuit from these effects al-
lowed to improve the system reliability and to reduce
the measurements uncertainty.
In terms of data transmission between the wear-
able and the smartphone application using BLE, the
wearable system in average sends the acquired data
each 206 ms, and the mobile application receives the
information basically in real-time, with a delay of
some µs. This achievement is reasonable since the
microcontroller is also performing the signal process-
ing and the generation of the stimulation pulses, and
the mobile application is plotting the received signals
and running lighter artificial intelligence trained mod-
els to adapt the stimulation rules used by the wear-
able.
5.2 Electrical Stimulation
The experimental tests related to the electrical stimu-
lation were performed to evaluate if a certain stimula-
tion voltage is achieved by adjusting the pulse vari-
ables, which are executed according to the control
rules defined by the AI algorithms that are continu-
ously updated on the wearable by the mobile appli-
cation. The amplification block was powered with a
voltage of 3.3V, the step-up converter elevates the in-
put voltage to an approximate value of 8.2V, and the
transformer generates the biphasic waveform and am-
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
228
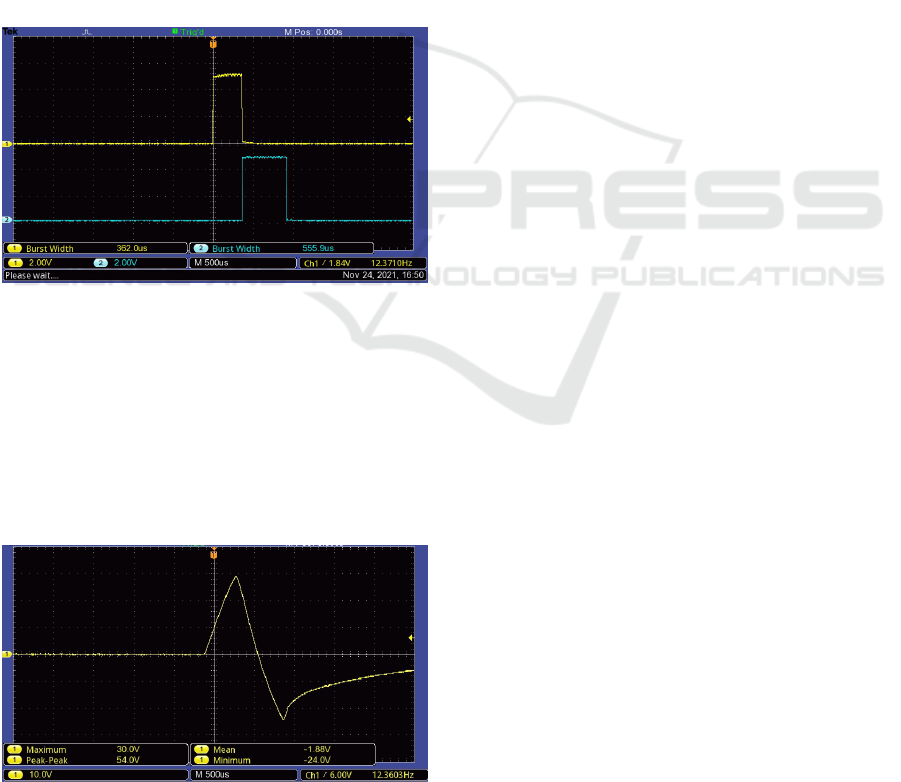
plifies the pulses according to the pulse width.
Since the objective was to achieve an output am-
plitude near 30V, the width of the pulses was adjusted
until the amplitude reached the desired value, starting
with a width value of 5 µs and increasing the width ac-
cording to the balance of the pulse. During the modi-
fication of the pulses’ width, the pulses become unbal-
anced, i.e. the positive component gradually becomes
bigger than the negative component. To correct this
issue, the width of the negative component is set with
a greater value than the positive one.
According to this, the amplitude of 30V was
reached for the values of 360 µs for the positive pulse,
550 µs for the negative pulse, and 80 ms for the pe-
riod. The pulses produced by the microcontroller,
based on the input values explained above, can be ob-
served in Figure 7. These pulses are sent to the trans-
former that composes the biphasic wave form and am-
plifies its amplitude.
Figure 7: Stimulation pulses produced by the microcon-
troller.
The resulting waveform for the previous pulses is
showed in Figure 8, with the biphasic wave signal
having approximately 30V of amplitude. The result-
ing signal is close to the expected, presenting the de-
sired output voltage and a balanced shape, with the
negative component bigger than the positive compo-
nent according to the width values previously estab-
lished for the input pulses.
Figure 8: Experimental stimulation signal with approxi-
mately 30V of amplitude.
6 CONCLUSIONS
Wearable systems have a vast range of applications,
e.g., sports and healthcare, representing technologi-
cal alternatives to assist the execution of rehabilita-
tion treatments and remote monitoring of vital health
parameters.
The proposed innovative and low-cost wearable
solution considers the use of dry electrodes and an
adaptive control of the bio-stimulation based on the
sEMG feedback, as well as the use of artificial in-
telligence algorithms to adapt the treatment proto-
col according to the pathology and the patient pro-
file. Preliminary experimental tests were carried out
and clearly shows that the main system requirements
were achieved, mainly in terms of the frequency of
sampling the EMG signal and the capability to inte-
grate the data acquisition with the stimulation using
dry electrodes. Also the effective transmission of col-
lected data from EMG and FES signals for the mobile
application was verified, being the microcontroller ca-
pable to manage the signal acquisition and transmis-
sion, and to generate the stimulation pulses.
During the experiments, it was also clear the need
to fix the electrodes to prevent them from changing
their position during the patient’s movements and to
apply the right pressure as this influences the noise
and may cause the EMG sensors to lose the reference
signal. The electromagnetic noise of the environment
strongly influences the quality of the acquired signal,
as well as the system accuracy, which is also affected
by the ADC resolution. For this purpose, the circuit
container was shielded to isolate the electronics from
the electromagnetic noise, with significant results.
Future work is devoted to test the developed solu-
tion using dry electrodes with connectors that provide
a better electrical and mechanical connection and are
more malleable to better adjust to the curvature of the
leg. The implementation of the developed solution in
a PCB and the integration of AI algorithms to provide
adaptive and customised treatments will be also con-
sidered as future work.
ACKNOWLEDGEMENTS
This work was supported by the European Regional
Development Fund (ERDF) through the Operational
Programme for Competitiveness and International-
ization (COMPETE 2020), under Portugal 2020 in
the framework of the NanoStim - Nanomaterials for
wearable-based integrated biostimulation (POCI-01-
0247-FEDER-045908) project.
Data Acquisition, Conditioning and Processing System for a Wearable-based Biostimulation
229

REFERENCES
Biometrics Ltd (2021). Datalog MWX8. ttp://www.
biometricsltd.com/datalog.tm. Accessed: 26.11.2021.
Chen, X.-B., Zhou, Y.-X., Wang, H.-P., L
¨
u, X.-Y., and
Wang, Z.-G. (2017). Design of sEMG-detecting Cir-
cuit for EMG-Bridge. In Proc. of 39th Annual Int’l
Conference of the IEEE Engineering in Medicine and
Biology Society (EMBC), pages 382–385.
Chun, S., Kim, J., Pang, C., et al. (2019). A Trans-
parent, Glue-free, Skin-attachable Graphene Pressure
Sensor with Micropillars for Skin-elasticity Measure-
ment. Nanotechnology, 30(33):335501.
Da Silva, H. P., Guerreiro, J., Lourenc¸o, A., Fred, A., and
Martins, R. (2014). BITalino: A Novel Hardware
Framework for Physiological Computing. In PhyCS,
pages 246–253.
Delsys (2021). Trigno Research+. ttps://delsys.com/trigno/
researc/. Accessed: 26.11.2021.
Di Flumeri, G., Aric
`
o, P., Borghini, G., Sciaraffa, N.,
Di Florio, A., and Babiloni, F. (2019). The dry rev-
olution: evaluation of three different eeg dry electrode
types in terms of signal spectral features, mental states
classification and usability. Sensors, 19(6):1365.
Ergeneci, M., Gokcesu, K., Ertan, E., and Kosmas, P.
(2018a). An embedded, eight channel, noise can-
celing, wireless, wearable semg data acquisition sys-
tem with adaptive muscle contraction detection. IEEE
Transactions on Biomedical Circuits and Systems,
12(1):68–79.
Ergeneci, M., Gokcesu, K., Ertan, E., and Kosmas, P.
(2018b). An embedded, eight channel, noise can-
celing, wireless, wearable semg data acquisition sys-
tem with adaptive muscle contraction detection. IEEE
Transactions on Biomedical Circuits and Systems,
12(1):68–79.
Fayyaz Shahandashti, P., Pourkheyrollah, H., Jahanshahi,
A., and Ghafoorifard, H. (2019). Highly con-
formable stretchable dry electrodes based on in-
expensive flex substrate for long-term biopotential
(EMG/ECG) monitoring. Sensors and Actuators A:
Physical, 295:678–686.
Ferraz, R. d. S., Fonseca, R. S. d., Rodrigues, I. T., Silva, C.
B. d., et al. (2021). Surface electromyographic signal
acquisition system for real time monitoring of upper
limbs muscles. Journal of Computational and Theo-
retical Nanoscience, 18(4):1147–1152.
Franco, T., Henriques, P. R., Alves, P., et al. (2021). System
Architecture for Home Muscle Rehabilitation Treat-
ment. In Submitted to the 10th World Conference on
Information Systems and Technologies.
Koh, A., Kang, D., Xue, Y., Lee, S., Pielak, R. M.,
Kim, J., Hwang, T., Min, S., Banks, A., Bastien,
P., et al. (2016). A soft, wearable microfluidic
device for the capture, storage, and colorimetric
sensing of sweat. Science translational medicine,
8(366):366ra165–366ra165.
Li, X., Zhou, Z., Ji, M., and Liu, W. (2021). A
wearable wireless device designed for surface elec-
tromyography acquisition. Microsystem Technologies,
27(4):1787–1795.
Lou, Z., Wang, L., Jiang, K., Wei, Z., and Shen, G. (2020).
Reviews of wearable healthcare systems: Materials,
devices and system integration. Materials Science and
Engineering: R: Reports, 140:100523.
Lynch, C. L. and Popovic, M. R. (2008). Functional elec-
trical stimulation. IEEE control systems magazine,
28(2):40–50.
Park, H.-K., Jung, J., Lee, D.-W., Shin, H. C.,
Lee, H.-J., and Lee, W.-H. (2021). A wear-
able electromyography-controlled functional electri-
cal stimulation system improves balance, gait func-
tion, and symmetry in older adults. Technology and
Health Care, (Preprint):1–13.
Peng, H.-L., Jing-Quan Liu, Tian, H.-C., Dong, Y.-Z., Yang,
B., Chen, X., and Yang, C.-S. (2016). A novel passive
electrode based on porous ti for eeg recording. Sen-
sors and Actuators B: Chemical, 226:349–356.
Robertson, D. G. E., Caldwell, G. E., Hamill, J., Kamen,
G., and Whittlesey, S. (2013). Research methods in
biomechanics. Human kinetics.
Rodrigues, M., Fiedler, P., K
¨
uchler, N., P. Domingues, R.,
Lopes, C., Borges, J., Haueisen, J., and Vaz, F. (2020).
Dry electrodes for surface electromyography based on
architectured titanium thin films. Materials, 13(9).
Tallgren, P., Vanhatalo, S., Kaila, K., and Voipio, J. (2005).
Evaluation of commercially available electrodes and
gels for recording of slow eeg potentials. Clinical
Neurophysiology, 116(4):799–806.
Trung, T. Q. and Lee, N.-E. (2016). Flexible and stretch-
able physical sensor integrated platforms for wear-
able human-activity monitoringand personal health-
care. Advanced materials, 28(22):4338–4372.
Zhu, L., Mao, G., Su, H., Zhou, Z., Li, W., L
¨
u, X., and
Wang, Z. (2021). A wearable, high-resolution, and
wireless system for multichannel surface electromyo-
graphy detection. IEEE Sensors Journal, 21(8):9937–
9948.
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
230
