
Eye Tracking Calibration based on Smooth Pursuit with
Regulated Visual Guidance
Yangyang Li
1,2 a
, Lili Guo
1b
, Guangbin Sun
1,* c
, Rongrong Fu
3d
, Zhen Yan
1e
and Ji Liang
1f
1
Technological and Engineering Center for Space Utilization of Chinese Academy of Sciences,
No. 9 Deng Zhuang South Rd., Beijing, 100094, China
2
University of Chinese Academy of Sciences, No. 19(A) Yuquan Rd., Beijing, 100049, China
3
Yanshan University, No. 438 West Hebei Avenue, Qinhuangdao, Hebei, 066004, China
Keywords: Eye Tracking, Smooth Pursuit, Gaze Calibration, Visual Guidance, Neural Network.
Abstract: Eye tracking calibration based on smooth pursuit has the characteristics of rapidity and convenience, but most
smooth pursuit calibration methods are based on spontaneous and passive gazes. The spatial-temporal
characteristics of the target movement can significantly affect the tracking performance, but few works have
performed calibration considering the effects of both the spatial and temporal variance of the smooth pursuit
target. Therefore, we proposed an off-line smoothing pursuit calibration featuring actively regulated speed
under specially designed visual guidance paths. In our prelude experiments, we found that there was an
obvious correlation between the eye movement velocity and the error of gaze point measurement. In particular,
when the movement velocity of gaze exceeded 6°/s, the accuracy and precision of the eye-tracking system
were obviously lower. Based on these findings, the visual guidance trajectory was regulated, with the speed
kept below 6°/s. The smooth pursuit calibration was combined with the neural network learning method. The
results showed that the mean absolute error was reduced from 1.0° to 0.4°, and the full calibration process
took only approximately 45 seconds.
1 INTRODUCTION
Human eye gaze behaviour has the dual function of
information acquisition and signal transmission
(Valtakari et al., 2021). Eye tracking is a sensor
measurement technology that is generally used in
human-computer interaction. Analysing the eye
movement of users through eye tracking is helpful for
understanding some of the user’s intentions (Hansen,
Ji, & intelligence, 2009). Humans usually prefer the
human-computer interaction mechanism with a
functionally intuitive interface and simple setting
procedures for ease and productiveness, while the
complex and incomprehensible human-computer
interaction mechanism will impose a burden on users
due to poor usability. From this perspective, the
a
https://orcid.org/0000-0002-5769-7596
b
https://orcid.org/0000-0002-4390-2640
c
https://orcid.org/0000-0002-2939-2066
d
https://orcid.org/0000-0003-0350-7619
e
https://orcid.org/0000-0003-2757-1623
f
https://orcid.org/0000-0001-9068-7990
interaction of eye movement tracking is qualified
with intuitive and simple interaction characteristics.
Eye tracking systems can be divided into two
types: invasive and noninvasive trackers. Most
tracking systems in practice are noninvasive based on
optical principles. Noninvasive eye tracking systems
can be divided into desktop and head-mounted
counterparts in practice (Mahmud, Lin, & Kim,
2020). Desktop eye tracking systems are based on
proximal fixed monitors and interact with digital
information from sensor streams and/or actionable
intelligent agents. They can work far away from the
target object, such as SMI RED250, Tobii Eye
Tracker5, Kinect and so on. This kind of equipment
contains a user-oriented camera, which is used to
capture the user's facial image. According to the
Li, Y., Guo, L., Sun, G., Fu, R., Yan, Z. and Liang, J.
Eye Tracking Calibration based on Smooth Pursuit with Regulated Visual Guidance.
DOI: 10.5220/0011524900003332
In Proceedings of the 14th International Joint Conference on Computational Intelligence (IJCCI 2022), pages 417-425
ISBN: 978-989-758-611-8; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
417

extracted features from the facial image, the gaze
point on the screen can be calculated. Head-mounted
eye tracking systems, such as SMI Glasses and Tobii
Pro Glasses3, contain at least two eye cameras to
capture eye images directly, in addition to the user-
faced camera with a scene camera to capture the scene
image, and estimate the user fixation points through
the eye images and the scene image. Head-mounted
equipment is more flexible, but it has a compact
design for portability; therefore, the performance of
hardware such as cameras and computing elements is
low, with poor data sampling and processing ability.
In addition, the head-mounted device has two other
limitations: eccentric eye movement (the eye tracking
camera of the head-mounted device has difficulty
capturing eye movement close to the edge) and
coordinate system variation (when tracking the target
object in the real scene, the position of the target
object will change with the user's head position and
user movement, and there is a large difference in the
data representation of the same target tracking
between users).
For remote and noninvasive eye tracking systems,
the commonly used technology is Pupil Center-
Corneal Reflection technology (PCCR) (Larrazabal,
Cena, Martínez, & medicine, 2019; Zhu & Ji, 2005).
Near-infrared light is used to generate a reflective
flash on the surface of the cornea, and then the
reflection image is captured by the camera. The
reflection of the light source is identified by the
reflection image in the cornea and pupil, and a vector
between the cornea and pupil is established, which is
called the fixation vector. Based on the mapping
model, the gaze position is calculated.
To establish the mapping model, parameters
(Guestrin & Eizenman, 2006), such as the pupil
center, corneal curvature center, optical axis and
visual axis, need to be acquired. The parameters of
the eyeball model are subject dependent, so user
calibration is needed before the normal use of an eye
tracking system to collect data of parameters with
individual differences; meanwhile, the process and
method of calibration greatly affect the quality of eye
tracking data (Holmqvist et al., 2011). In addition,
with the passage of time, the estimation of the gaze
point by the mapping model of the eye tracking
system will become inaccurate for parameter drifting.
This will happen when the system characteristics or
user physiological characteristics change. However,
in running time, there is no automatic method to
assess when the precision of the mapping model will
decline and online compensation is difficult.
Therefore, routine offline calibration is a necessary
task (Gomez & Gellersen, 2018). At present, the
existing calibration methods come in two categories:
calibration based on distributed static target points
and smooth pursuit calibration. Calibration based on
distributed static target points displays a set of
specific static target points on the screen and requires
the user to gaze at each of the target points for a period
of time, one at a time (Harezlak, Kasprowski, &
Stasch, 2014). This calibration method varies with
different researchers in the number of target points,
layout, length of time to gaze at the target point, and
type of mapping algorithm. Theoretically, the more
points there are, the higher the precision of the model
estimation. However, the calibration process is
usually characterized by tedious repetition, user
fatigue and low ease of use (Drewes, Pfeuffer, & Alt,
2019). Therefore, researchers have proposed smooth
pursuit calibration (Pfeuffer, Vidal, Turner, Bulling,
& Gellersen, 2013), making use of the user's attention
mechanism by naturally gazing at moving targets for
calibration. The results show that compared with the
distributed standard 9-point static calibration, not
only does the smooth pursuit calibration cover a
wider space and the calibration precision is improved
but also the calibration time is shortened and the
process is easy to use.
The smooth pursuit method has a unique
advantage for people with difficulty in gaze fixation.
In 2017, Pfeuffer (Pfeuffer et al., 2013) proposed
completing the calibration task by using the smooth
pursuit calibration method for people with difficulty
concentrating (such as autistic children). The
experimental results show that when the calibration
target points move along the horizontal uniform path,
the wave horizontal path and vertical path, the mean
error can reach within 1°, which is better than the
fixation error of 1.15° with 28 static points, but the
whole calibration process takes 30 s to 60 s. In 2018,
Argenis Ramirez Gomez (Gomez & Gellersen, 2018)
et al. proposed a new smooth tracking calibration
mechanism named smooth-i, which detects the
motion area by motion matching and collects motion
points to create a calibration profile. When the user
tracks a moving target, the line of sight and the
contour trajectory match, and data points are
automatically collected. If there are inaccurate points,
the modified mapping model is recalibrated. in 2019,
Yasmeen (Abdrabou, Mostafa, Khamis, & Elmougy,
2019) et al. applied gaze estimation based on smooth
pursuit to text input for disabled users as the speed
and precision of smooth tracking and improved the
average input rate. Most of the studies on smooth
tracking calibration are online calibrations with
moving targets during the use of eye tracking
equipment. Although a separate offline calibration
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
418

step is omitted and the fixation error can also reach
1°, it does not apply if there is no moving target
during the use of eye tracking equipment; therefore, a
deliberate calibration with visual guidance has to be
summoned from time to time.
In the strategy of fine calibration to reduce the
fixation error, there are two main methods:
calibration mode-based calibration and data-driven
recalibration. The calibration mode-based approach
reduces errors caused by system variables, focusing
on calibration with choosing an appropriate layout of
distributed static targets and a method of data
integration. For example, Adithya(Adithya, Hanna,
Kumar, & Chai, 2018) et al. used multiple sets of
calibration points in initial calibration to reduce
errors; Harrar (Harrar, Le Trung, Malienko, & Khan,
2018) et al. proposed using five groups of different
types of calibration methods of distributed static
target points and taking the average (directly
watching the calibration point or closing to the
invisible calibration point by prompt). The average
value of the results is lower than the error caused by
only one calibration method. The working principle
of the data-driven calibration method is that the error
is further eliminated by modeling residual error from
the initial calibration data, which is also called
secondary calibration or recalibration. Because they
do not need to modify the existing calibration
program or reconstruct the usual white-box mapping
model of gaze estimation, it only needs to process the
collected eye movement data by numerical methods.
For example, Yunfeng Zhang (Zhang & Hornof,
2014) et al. proposed using an independent quadratic
polynomial regression to estimate the error in the X
and Y directions to compensate for the measurement
results of the eye tracker. Argenis (Gomez &
Gellersen, 2018) et al proposed using a quadratic
polynomial as a calibration function by substituting
the trajectory of the movement into the calibration
function to calculate the error. If the error is greater
than the set threshold, real-time recalibration can be
taken to reduce the error. Zineb (Zineb, Rachid, &
Talbi) et al. used thin plate splines (TPS) as a
surrogate model for a surrogate-based optimization
algorithm, which improved the speed and precision of
calibrations.
We modeled the residual error by a data-driven
method, considered the effect of the static distribution
of target points on the data, and proposed a smooth
pursuit calibration method based on the modulated
guiding trajectory. This method made use of the data
from the initial calibration of the eye tracking
equipment. We established a calibration trajectory in
the recalibration task and modulated its spatial-
temporal characteristics to reduce the influence of
error sources, thereby improving the calibration
performance. Through systematic experiments, we
found that the gaze point error of the smooth curve
trajectory has a correlation with the velocity curve of
the gaze trajectory. When the velocity exceeds a
threshold (approximately 6°/s is found to be a critical
point), the gaze error in the X and Y directions
increases significantly with increasing velocity in
both the X and Y directions. Based on these findings
and considering the general characteristics of the
spatial distribution of eye tracking error, the guidance
trajectory was designed, and its speed was modulated
within an appropriate range. The target calibration
point moves according to the guidance trajectory, and
gaze data are collected at the same time. Without
changing the underlying physical mapping model of
eye movement tracking equipment, a gaze error
compensation model was established through neural
network learning. The experimental results have
shown that the mean error of the user gaze point
estimation decreases to approximately 0.4° from the
initial value of approximately 1.0°, and the time spent
in the whole calibration process is approximately 45
s, which has the advantages of being easy to use, fast
and precise.
2 METHODS
2.1 Smooth Pursuit with Regulated
Visual Guidance and Tracking
Data Collection for Recalibration
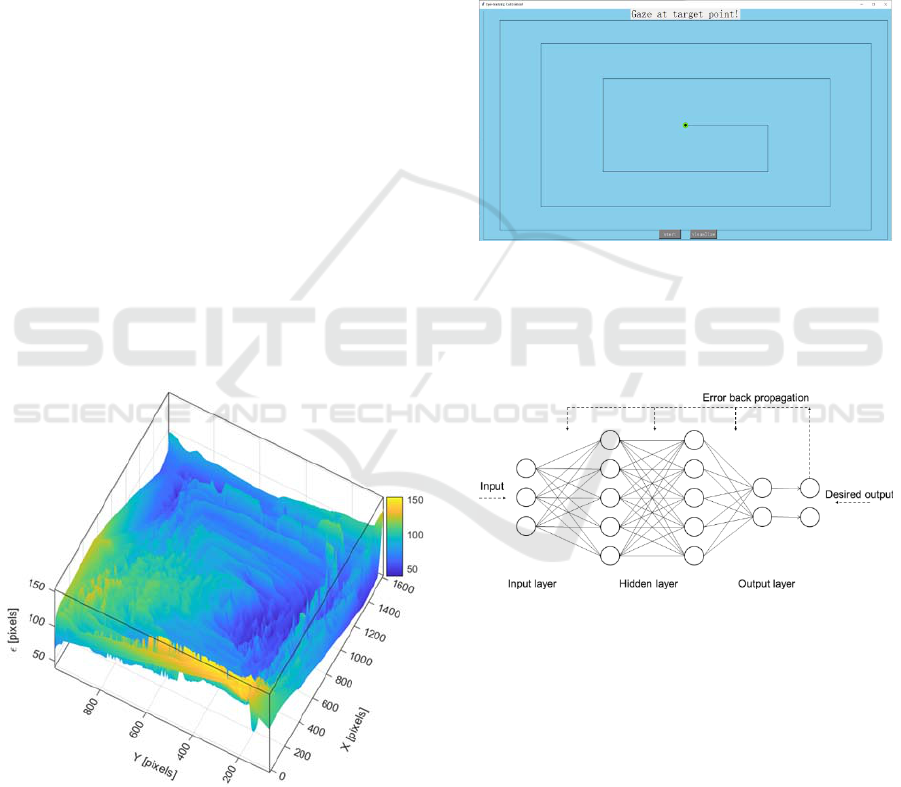
The moving target point of the smooth pursuit
calibration program is composed of a circle with a
diameter of 20 pix and a center diameter of 10 pix.
The initial position is located at the center of the blue
calibration plane of the interface, as shown in Figure
2. The calibration gaze point (the green point) follows
the spatial trajectory with certain temporal
characteristics. In our previous experiments, two
calibration modes of hidden and visible smooth
calibration curve trajectories in the calibration
window were tested. It was found that the two
collection methods had little influence on data
quality.
In the following experiment in this work, the
calibration window was configured to show the
calibration trajectory while collecting data.
According to the motion of the calibration points, a
large number of target points can be extracted from
the continuous gaze data. In the calibration window
Eye Tracking Calibration based on Smooth Pursuit with Regulated Visual Guidance
419
of 1600x900 pixels, the calibration data collection
process takes approximately 35 s. According to the
condition that the time stamp of the target point is no
more than 5 ms ahead of the time stamp of the eye
tracking data, no less than 2000 groups of target point
data can be collected on the trajectory. According to
the conclusions drawn by Harezlak (Harezlak et al.,
2014) et al. and our multiple experimental analysis,
the eye movement data are unreliable within the first
600 ms to 700 ms when the smooth pursuit calibration
starts to collect gaze data. Therefore, in the
calibration process proposed, the target point will
jump 750 ms in situ after clicking the calibration start
button, which is mainly based on two considerations:
1. To avoid collecting unreliable data; 2. To remind
users that the smooth pursuit calibration program is
about to start, they need to pay attention at this time.
Considering the border-oriented trend of the error
distribution characteristics of the eye tracking system,
as shown in Figure 1, and its relative stability for
specific equipment, initial calibration configuration
and individual experimental personnel, the
appropriate trajectory can be roughly determined by
the error spatial distribution before fine recalibration.
The spatial guidance trajectory design example with
an uneven density distribution is shown in Figure 2.
As shown there, the pursuit calibration trajectory is
segmentally smooth with the higher line density
where the closer to boarder.
Figure 1: Typical spatial distribution of gaze error (where
X and Y are gaze coordinates along horizontal and vertical
directions; ε is gaze error defined by Euclidean distance).
In addition, the time modulation of the guidance
trajectory needs to be considered. Considering the
physiological characteristics of human visual
tracking, it is conjectured that motion speed is an
important factor affecting trajectory calibration error.
The repeated linear path with different uniform
velocities and curve paths with varying velocities are
designed in prelude experiments to verify the
correlation between speed and tracking error and to
determine the appropriate speed threshold, which
provides the basis for the calibration trajectory
regulation. On the other hand, the repeatability
precision analysis of the tracking data in prelude
experiments also provides evidence for the
potentiality of improving accuracy.
Figure 2: Spatially nonuniform square spiral trace on the X-
Y plane with limited speed designed for model learning.
2.2 Recalibration Model for Regulated
Smooth Pursuit
Figure 3: Structural diagram of the BP neural network.
The data-driven recalibration method is widely used.
The error model is learned from the data, and the error
characteristics are extracted to reduce the error. A
large number of researchers (Blignaut, Holmqvist,
Nyström, & Dewhurst, 2014; Drewes et al., 2019;
Huang, Kwok, Ngai, Chan, & Leong, 2016; Zhang &
Hornof, 2014) established the recalibration model
through the regression method. The regression
method is simple, and the program execution is fast.
Simple linear regression and low-order polynomial
regression cannot obtain a good fit. The BP neural
network (Rumelhart, Hinton, & Williams, 1986) is a
network model based on error backpropagation. As
shown in Figure 3, the BP network contains an input
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
420

layer, output layer, and one or more hidden layers.
There is no feedback path across layers and no
interconnection within each layer. All neurons are
connected between adjacent layers. Although it has a
simple structure, it can learn a large number of input
and output mapping relationships with high
efficiency, taking less than 10 s with more than 2000
data points in our case. The experimental results of
Harezlak (Harezlak et al., 2014) et al. also show that
artificial neural networks have a good error
calibration capability.
3 EXPERIMENTS
3.1 Equipment
In this study, we use the Tobii 4c eye tracking system,
which is based on the PCCR principle (as shown in
Figure 4), with a recommended working distance of
50 ~ 95 cm and a near infrared (NIR 850 nm) light
source. The calculation equipment is a Dell XPS8940
PC, Windows 10 64-bit OS, 3.5 GHz Intel i9 CPU.
The eye tracking equipment is installed under a 28-
inch Samsung monitor with a resolution of
3840x2160. All data samples are streamed at 60 Hz
from the Tobii official driver with an initial
calibration, which is done once and indefinitely.
Figure 4: Working environment of eye tracking equipment
(A refers to the calibration window; B refers to the eye
tracking equipment).
3.2 Procedure and Results
During the experiment, to verify the influence of the
speed of the target gaze point on the tracking error,
we repeated the measurement and collected the eye
movement fixation data for analysis. The eye fixation
data were measured by the movement of the eyeball
following the target point along the horizontal line
and the vertical line. Seven groups of experiments
were performed at speeds of 2, 4, 6, 8, 10, 12 and 14
°/s. Each group of experiments was repeated ten
times. Figure 5 shows the spatial traces and absolute
error distribution of measured gaze points of all
groups/repetitions with eyeballs following the target
points along the horizontal straight trajectory. Similar
to the vertical straight-line trajectory, Figure 6 shows
the spatial traces and absolute error distribution of the
measured gaze points of all groups/repetitions with
eyeballs following the moving target fixation point.
It can be observed from the error distribution in
Figures 5 and 6 that the eye gaze error of smooth
tracking under multiple repeated measurements is not
random, and with the increase of the gaze moving
speed in each axis, the absolute error gradually
increases, and the dispersion degree of distribution
also increases. However, it can be seen that when the
gaze velocities in the X and Y directions are both
within 6°/s, the direction errors are not prominently
differentiable between each group and tend to be
stable within each group. To further verify the effect
of gaze movement speed on gaze error, we conducted
an experiment of variable-speed gaze movement in
the Y direction. We set three groups of gaze
movement trajectories with large variance, and each
group repeated five times. The target guided the gaze
point to move at a constant speed in the horizontal
direction and at a variable speed in the vertical
direction. The spatial traces, vertical velocity
distribution and vertical error distribution
(nonabsolute value) of the measured gaze points of all
groups/repetitions with eyes following the movement
of the target gaze point are shown in Figure 7.
From the data distribution of Figure 7, we can
further observe that there is an obvious correlation
between the velocity curve and the error curve in the
corresponding axis. When the velocity curve reaches
the extreme value, the direction error also reaches the
extreme value in the corresponding section with slight
phase shifting.
Combined with the characteristics of Figure 5,
Figure 6 and Figure 7, we set the moving speed of
the calibration fixation point to 5.4°/s (equivalent to
2 pix/s for the experimental device) to follow the
target calibration trajectory, and the data generated
are used to train the neural network. However, five
velocity modulation trajectories with large variances
are randomly generated with the fixation point
moving at a constant velocity in the X direction and
at a velocity modulated to less than 6°/s in the Y
direction to predict and verify the error
compensation model.
Table 1 shows the error table of fixation data
collected by an experimenter based on the Tobii 4c
Eye Tracking Calibration based on Smooth Pursuit with Regulated Visual Guidance
421
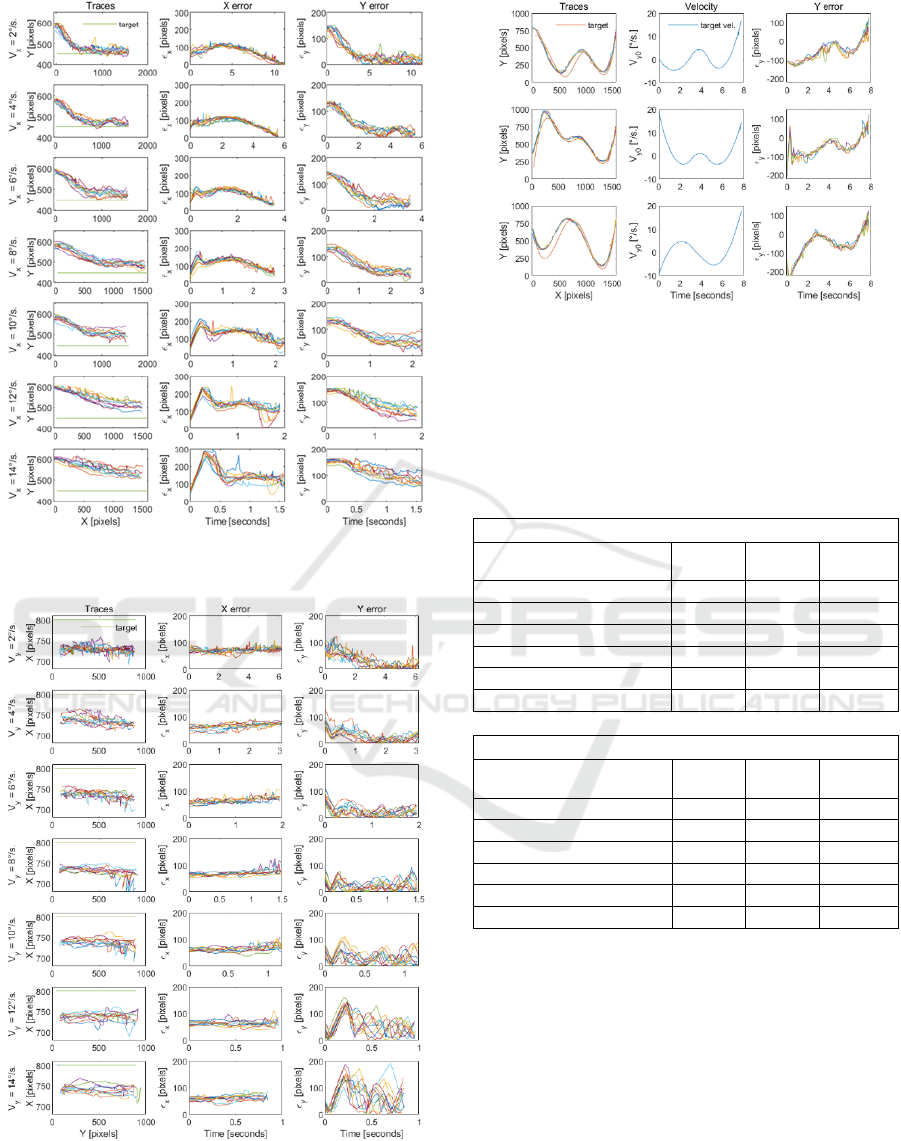
Figure 5: Horizontal line tracking with different constant X
velocities.
Figure 6: Vertical line tracking with different constant Y
velocities (note X and Y swapped in the ‘Traces’ column).
Figure 7: Tracking error with limited varying Y velocities.
Table 1: Multiple sets of gaze point dataset error (a. Errors
in degrees as unit; b. Errors in pixels. In the figures,
Trace_calibration data are used for calibration, Trace_1~5
are used for testing the recalibration model later, as shown
in Table 2, and X_mae and Y_mae are the mean absolute
errors in the horizontal and vertical directions,
respectively).
Error(degrees)
Test
(experiments number)
X_mae Y_mae mae
Trace
_
calibration 0.81 0.70 1.07
Trace_1 0.69 0.81 1.06
Trace_2 0.84 0.74 1.12
Trace_3 0.80 0.80 1.13
Trace
_
4 0.72 0.61 0.94
Trace
_
5 0.73 0.61 1.13
(a)
Error(pixels)
Test
(experiments number)
X_mae Y_mae mae
Trace
_
calibration 59 51 78
Trace_1 50 59 77
Trace_2 61 54 81
Trace_3 58 59 83
Trace
_
4 53 45 70
Trace
_
5 54 45 70
(b)
fixation smoothing calibration trajectory and five
randomly generated test trajectories (before the
recalibration model is applied), including the average
absolute error and the maximum absolute error in the
X direction and the average absolute error and the
maximum absolute error in the Y direction. In the
process of eye movement data collection, the
measurement process of eye movement is
independent and parallel with the movement of the
target fixation point without interfering with each
other. Finally, according to their respective
timestamps, the advantages of independent and
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
422
parallel visualizing and sampling are to ensure the
real-time performance of measurement data to the
greatest extent, preventing the inaccurate
measurement caused by the time fluctuation noise.
The collected data include the position and time
stamp of the target point on the screen (x_target,
y_target, unit: pix; timestamp, unit: us), Tobii 4c
measurement data and timestamp (timestamp, unit:
us), tobii 4c measurement data include the
measurement of user's eye fixation on the screen and
data validity flag (x_meas, y_meas, unit: pix; validity,
as 0 or 1), the spatial location of the user’s left eye
relative to the center of the screen, and the data
validity signs (x_lefteye, y_lefteye, z_lefteye, unit:
mm; valid, as 0 or 1), the spatial location of the user’s
right eye relative to the center of the screen
(x_righteye, y_righteye, z_righteye, unit: mm;
validity, as 0 or 1). Before training the BP neural
network model, it is necessary to filter the data whose
filtering time difference is greater than the predefined
threshold (set to 5 ms) or validty = 0. With validity =
0, it indicates that the sampling data of eye movement
equipment are invalid, which situation will occur if at
the sampling moment eyes are closed or the user is
not in the working space of the eye movement
tracking equipment.
Table 2: Corrected fixation data against Table 1 (a. Errors
in degrees as units; b. Errors in pixels. Trace_1~5 data are
used again to test the recalibration model trained by
Trace_calibration data, as shown in Table 1. X_mae and
Y_mae are the mean absolute errors after correction in the
horizontal and vertical directions, respectively).
Error(degrees)
Test
(experiments
number
)
X_mae Y_mae mae R2_score
Trace_1 0.22 0.21 0.30 0.989
Trace_2 0.30 0.22 0.37 0.995
Trace_3 0.25 0.29 0.38 0.987
Trace_4 0.30 0.17 0.34 0.996
Trace_5 0.23 0.26 0.35 0.990
(a)
Error (pixels)
Test
(experiments number)
X_mae Y_mae mae
Trace_1 16 16 23
Trace_2 22 16 27
Trace_3 19 21 28
Trace_4 22 13 26
Trace_5 17 19 25
(b)
An appropriate mapping model is established
based on the machine learning library Sklearn and BP
neural network structure. The calibration dataset
collected in a group of experiments by an
experimenter is used for training by using the
appropriate model structure and method, determining
the appropriate hidden layer number and node
number, selecting ReLU (f(x) = max(0, x)) as the
activation function, Adam as the optimization method,
x_meas, y_meas, x_lefteye, y_lefteye, z_lefteye,
x_righteye, y_righteye, z_righteye as the feature
input, and x_target, y_target as the output.
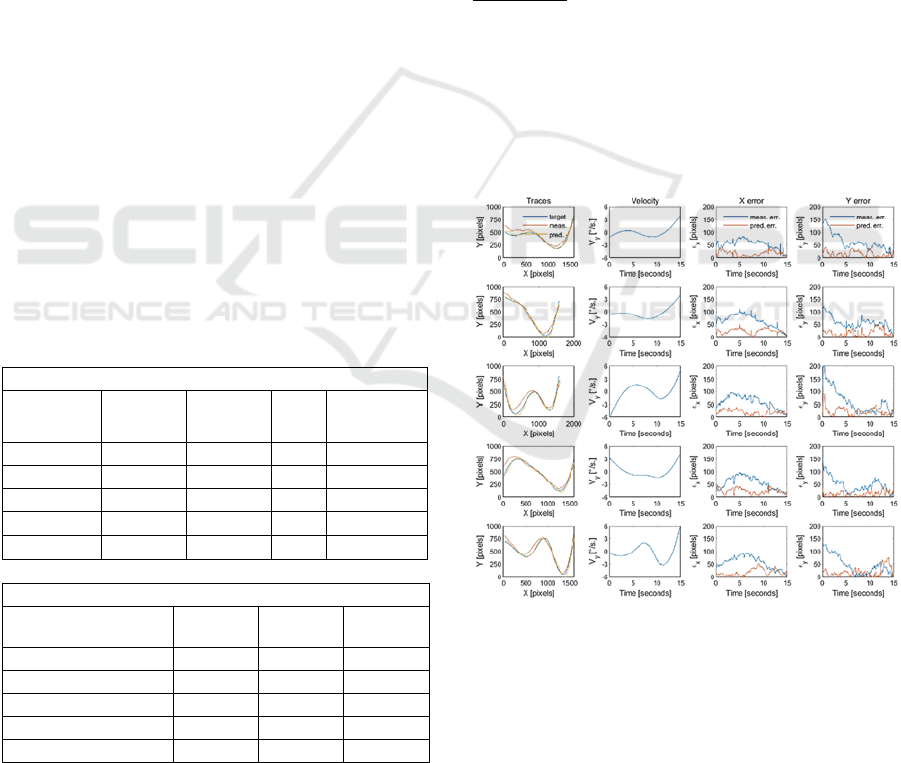
We train Trace_calibration (calibration dataset)
based on the BP neural network and test the Trace_1
to Trace_5 fixation datasets based on the obtained
training model. The results are shown in Table 2.
In Table 2, R2_score (Raju, Bilgic, Edwards, &
Fleer, 1997; Yin & Fan, 2001) is a kind of model
accuracy evaluation index with 𝑅2
1
∑
∑
, where 𝑖 is the time point index in a
single test trace, 𝑦 is the target gaze point, 𝑦 is the
model corrected prediction from gaze measurement,
and 𝑦 is the temporal average of y. Figure 8 shows the
corresponding visualization of these model-based
recalibration results (with error in pixels) tested by
the random curve trajectory fixation datasets
(Trace_1 to Trace_5).
Figure 8: Spatially randomly generated curves tracking
with temporally limited speed for model verification.
4 DISCUSSION
In this study, a smooth pursuit calibration method
based on velocity modulation was proposed, and the
correction effect of the BP neural network model on
Eye Tracking Calibration based on Smooth Pursuit with Regulated Visual Guidance
423

the eye movement data generated randomly but
satisfying the regulation was verified.
Before recalibration, the mean absolute error of
the fixation point was approximately 1.0°. After
several experimental measurements of the smooth
calibration trajectory, the data trajectory of the
fixation point measured by the eye tracking
equipment basically features small variance, which
can also be seen from Figures 5 and 6. This mainly
reflects the high repeatability performance of the eye
tracking equipment, and there is statistical regularity
underpinning the residual error with high confidence.
There is a potentiality that the error can be effectively
reduced through an appropriate recalibration model.
Meanwhile, we found that there is a correlation
between the error curve of the fixation point and the
velocity curve in the varying velocity experiment. We
carried out seven groups of uniform motion tracking
experiments of horizontal and vertical lines, with
speeds set as 2, 4, 6, 8, 10, 12, and 14°/s, respectively,
and found that when the velocity of the fixation point
exceeds 6°/s, the error gradually diverges, and the
error curve becomes much more uncertain. Therefore,
in the formal experiment of smooth pursuit for
calibration, the speed of the target gaze point should
be kept smaller than 6°/s.
In our calibration experiment, we assume that the
BP neural network can predict the uncollected gaze
data points by learning the data from the calibration
curve to effectively reduce the residual error. This
assumption is indeed verified. We found that the
randomly generated test curve showed an obvious
decrease in error when applying the learnt model,
with the adjustment of the appropriate training
parameters (nonlinearity). In addition, the regression
model of the number of layers and nodes of the BP
neural network is established quickly with a good
error compensation effect. The average absolute error
of the smoothing calibration based on visual guidance
is lowered to approximately 0.4° from 1.0° within 10
s to finish training.
In addition, the experimenters may feel dry and
uncomfortable in the eyes in the process of calibration
procedures; if they deliberately avoid blinking, this is
the manifestation of extraocular eye muscle fatigue
(Sun, 2003). This situation will make the fixation data
change greatly in a short period of time. From the
original error curve in Figure 5 and Figure 6, it can be
observed that there are some erroneous jittering
points, which is the blinking situation described. The
occasional error jitters will not affect the calibration
effect of the model. In the calibration process, it is just
enough to relax and focus, and it is not necessary to
deliberately keep eyes open because extraocular eye
muscles are not fatigable in normal usage, similar to
jaw muscles (Fuchs & Binder, 1983).
5 CONCLUSION AND FUTURE
WORK
In previous research on smooth pursuit calibration, it
is generally necessary for users to gaze at the moving
target during the normal use of eye tracking
equipment and recalibrate with the target location in
running time. Although this smooth calibration
method eliminates the calibration steps before the
formal use of eye movement tracking equipment, it
does not work well without a moving target in the use
process. In our study, we found a correlation between
speed and tracking error through experiments and
proposed smooth pursuit calibration with speed-
modulated visual guidance to collect the appropriate
gaze data. We found the appropriate method to
establish the data calibration model. The sampling
and training of the recalibration process is fast, within
45s to complete, and the gaze point has a significantly
smaller error than the official calibration. In the
course of our experiment, it is found that displaying
the smooth calibration curve in the calibration
window can make users focus more naturally and
avoid visual fatigue.
In future research, we will study the influence of
the history and the future trajectory of the smooth
calibration curve near the current target point on the
model performance and design a learning algorithm
to replace the function of the smooth trajectory visual
guidance so that it is more suitable for a more general
and practical working scenario.
ACKNOWLEDGMENTS
This work was supported in part by National Natural
Science Foundation of China (Grant No. 62003324);
in part by the State Key Laboratory of Robotics and
System of China under Open Fund Program (Grant
No. SKLRS-2021-KF-06); in part by Hebei
Provincial Department of Science and Technology
under Central Government Guides Local Scientific
and Technological Development Fund Program
(Grant No. 206Z0301G).
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
424

REFERENCES
Abdrabou, Y., Mostafa, M., Khamis, M., & Elmougy, A.
(2019, June). Calibration-free text entry using smooth
pursuit eye movements. In Proceedings of the 11th
ACM Symposium on Eye Tracking Research &
Applications (pp. 1-5).
Adithya, B., Hanna, L., Kumar, P., & Chai, Y. J. T. (2018).
Calibration techniques and gaze accuracy estimation in
pupil labs eye tracker. TECHART: Journal of Arts and
Imaging Science, 5(1), 38-41.
Blignaut, P., Holmqvist, K., Nyström, M., & Dewhurst, R.
(2014). Improving the accuracy of video-based eye
tracking in real time through post-calibration
regression. In Current Trends in Eye Tracking
Research (pp. 77-100)
Drewes, H., Pfeuffer, K., & Alt, F. (2019, June). Time-and
space-efficient eye tracker calibration. In Proceedings
of the 11th ACM Symposium on Eye Tracking Research
& Applications (pp. 1-8)
Gomez, A. R., & Gellersen, H. (2018, June). Smooth-i:
smart re-calibration using smooth pursuit eye
movements. In Proceedings of the 2018 ACM
Symposium on Eye Tracking Research &
Applications (pp. 1-5).
Guestrin, E. D., & Eizenman, M. (2006). General theory of
remote gaze estimation using the pupil center and
corneal reflections. IEEE Transactions on biomedical
engineering, 53(6), 1124-1133.
Hansen, D. W., & Ji, Q. (2009). In the eye of the beholder:
A survey of models for eyes and gaze. IEEE
transactions on pattern analysis and machine
intelligence, 32(3), 478-500.
Harezlak, K., Kasprowski, P., & Stasch, M. (2014). Towards
accurate eye tracker calibration–methods and
procedures. Procedia Computer Science, 35, 1073-1081.
Harrar, V., Le Trung, W., Malienko, A., & Khan, A. Z.
(2018). A nonvisual eye tracker calibration method for
video-based tracking. Journal of Vision, 18(9), 13-13.
Holmqvist, K., Nyström, M., Andersson, R., Dewhurst, R.,
Jarodzka, H., & Van de Weijer, J. (2011). Eye tracking:
A comprehensive guide to methods and measures. OUP
Oxford.
Huang, M. X., Kwok, T. C., Ngai, G., Chan, S. C., & Leong,
H. V. (2016, May). Building a personalized, auto-
calibrating eye tracker from user interactions.
In Proceedings of the 2016 CHI Conference on Human
Factors in Computing Systems (pp. 5169-5179).
Larrazabal, A. J., Cena, C. G., & Martínez, C. E. (2019).
Video-oculography eye tracking towards clinical
applications: A review. Computers in biology and
medicine, 108, 57-66.
Mahmud, S., Lin, X., & Kim, J. H. (2020, January).
Interface for Human Machine Interaction for assistant
devices: a review. In 2020 10th Annual Computing and
Communication Workshop and Conference
(CCWC) (pp. 0768-0773).
Zineb, T., Rachid, E., & Talbi, E. G. (2019, October). Thin-
plate spline RBF surrogate model for global
optimization algorithms. In 2019 1st International
Conference on Smart Systems and Data Science
(ICSSD) (pp. 1-6).
Pfeuffer, K., Vidal, M., Turner, J., Bulling, A., & Gellersen,
H. (2013). Pursuit calibration: Making gaze calibration
less tedious and more flexible. In Proceedings of the
26th annual ACM symposium on User interface
software and technology (pp. 261-270).
Raju, N. S., Bilgic, R., Edwards, J. E., & Fleer, P. F. (1997).
Methodology review: Estimation of population validity
and cross-validity, and the use of equal weights in
prediction. Applied Psychological Measurement, 21(4),
291-305.
Rumelhart, D. E., Hinton, G. E., & Williams, R. J. (1986).
Learning representations by back-propagating
errors. nature, 323(6088), 533-536.
Valtakari, N. V., Hooge, I. T., Viktorsson, C., Nyström, P.,
Falck-Ytter, T., & Hessels, R. S. (2021). Eye tracking in
human interaction: Possibilities and limitations. Behavior
Research Methods, 53(4), 1592-1608.
Yin,P.,&Fan, X. (2001). Estimating R 2 shrinkage in
multiple regression: A comparison of different
analytical methods. The Journal of Experimental
Education, 69(2), 203-224.
Zhang, Y., & Hornof, A. J. (2014, March). Easy post-hoc
spatial recalibration of eye tracking data.
In Proceedings of the symposium on eye tracking
research and applications (pp. 95-98).
Zhu, Z., & Ji, Q. (2005, June). Eye gaze tracking under
natural head movements. In 2005 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR'05) (Vol. 1, pp. 918-923).
Sun, H. B. (2003), Why do we blink? Journal of biology
teaching (in Chinese), 2003(12), 52-52.
Fuchs, A. F., & Binder, M. D. (1983). Fatigue resistance of
human extraocular muscles. Journal of neurophysiology,
49(1), 28-34.
Eye Tracking Calibration based on Smooth Pursuit with Regulated Visual Guidance
425
