
A-Eye: Driving with the Eyes of AI for Corner Case Generation
Kamil Kowol
1
, Stefan Bracke
2
and Hanno Gottschalk
1
1
School of Mathematics and Natural Sciences, University of Wuppertal, Gaußstraße 20, Wuppertal, Germany
2
Chair of Reliability Engineering and Risk Analytics, University of Wuppertal, Gaußstraße 20, Wuppertal, Germany
Keywords:
Corner Case, Human-centered AI, Human-in-the-Loop, Automated Driving, Test Rig.
Abstract:
The overall goal of this work is to enrich training data for automated driving with so-called corner cases in
a relatively short period of time. In road traffic, corner cases are critical, rare and unusual situations that
challenge the perception by AI algorithms. For this purpose, we present the design of a test rig to generate
synthetic corner cases using a human-in-the-loop approach. For the test rig, a real-time semantic segmentation
network is trained and integrated into the driving simulation software CARLA in such a way that a human can
drive on the network’s prediction. In addition, a second person gets to see the same scene from the original
CARLA output and is supposed to intervene with the help of a second control unit as soon as the semantic
driver shows dangerous driving behavior. Interventions potentially indicate poor recognition of a critical scene
by the segmentation network and then represent a corner case. In our experiments, we show that targeted and
accelerated enrichment of training data with corner cases leads to improvements in pedestrian detection in
safety-relevant episodes in road traffic.
1 INTRODUCTION
Despite AI systems achieve impressive performance
in solving specific tasks, e.g. in automated driving,
they lack understanding of the context of safety in
traffic. In contrast, while humans are often described
as lousy drivers, as they tend to be diverted or feel fa-
tigue, humans have a fine understanding, when a traf-
fic scene could lead to a situation, where humans are
at risk.
It has been observed previously, that to increase
robustness and performance of AI algorithms a large
number of clean and diverse scenes is needed (Karpa-
thy, 2021). However, a large amount of annotated data
per se might not imply safe operation in those rare sit-
uations, where road users are exposed to a substantial
risk. In this work, we aim to present an accelerated
testing strategy that leverages human risk perception
to capture corner cases and thereby achieve perfor-
mance improvement in safety-critical scenes. In or-
der to obtain many safety-critical corner cases in a
short time, we stop training at an early stage so that
the network is sufficiently well trained. Nevertheless,
the scenes generated in this way are still useful to im-
prove fully trained networks.
For this purpose, a semantic network is trained
with synthetic images from the open-source driv-
ing simulation software CARLA (Dosovitskiy et al.,
2017). In addition, a test rig consisting of 2 control
units is connected to CARLA in such a way that the
ego vehicle can be controlled with both control units
by a human. In this process, the semantic segmenta-
tion network is integrated into CARLA in such a way
that first the original CARLA image is sent through
the network and the prediction is displayed on the
screen of one driver. The second driver, in turn, sees
the real CARLA image and is supposed to intervene
as a safety driver only if he or she feels that a situa-
tion is being wrongly assessed by the other driver. We
aim to consider situations in which the AI algorithms
lead to incorrect evaluations of the scene, which we
refer to as safety-relevant corner cases, in order to
improve performance through targeted data enrich-
ment. This is done by exchanging images from the
original dataset with the safety-critical corner cases,
thus keeping the total amount of data fixed. We show
that the semantic segmentation network that contains
safety-critical corner cases in the training data per-
forms better on similar critical situations than the net-
work that does not contain any safety-critical situa-
tions.
Our approach somehow follows the idea of ac-
tive learning, where we get feedback on the quality
of the prediction by interactively querying the scene.
However, unlike in standard active learning we do
not leave the query strategy to the learning algorithm,
Kowol, K., Bracke, S. and Gottschalk, H.
A-Eye: Driving with the Eyes of AI for Corner Case Generation.
DOI: 10.5220/0011526500003323
In Proceedings of the 6th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2022), pages 41-48
ISBN: 978-989-758-609-5; ISSN: 2184-3244
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
41

Figure 1: View of the semantic driver (top) and the safety
driver (bottom).
but make use of the human’s fine tuned sense of risk
to query safety-relevant scenes from a large amount
of street scenes, leading to enhanced performance in
safety-critical situations.
The contributions of this work can be summarized
as follows:
• An experimental setup, that could also be imple-
mented in the real world, permits testing the safety
of the AI perception separately from the full sys-
tem safety including the driving policy of an auto-
mated vehicle.
• A proof of concept for the retrieval of training data
for automated driving with a human-in-the-loop
approach that is safety-relevant.
• A proof that training on safety-relevant situations
generated during poor network performance is
beneficial for the recognition of street hazards.
Outline. Section 2 discusses related work on corner
cases, human-centered AI and human-in-the-loop. In
Section 3 we briefly describe the experimental setup
used for corner case generation and which data and
network were used for our experiments. In Section 4
we explain our strategy to generate corner cases. In
Section 5 we demonstrate the beneficial effects of
training with corner cases for safety-critical situations
in automated driving. Finally, we present our conclu-
sions and give an outlook on future directions of re-
search in Section 6.
2 RELATED WORKS
2.1 Corner Cases
Training data contains few, if any, critical, rare or un-
usual scenes, so-called corner or edge cases. In the
technical fields, the term corner case describes spe-
Figure 2: Test rig including steering wheels, pedals, seats
and screens.
cial situations that occur outside the normal operating
parameters (Chipengo et al., 2018).
According to (Bolte et al., 2019), a corner case
in the field of autonomous driving describes a ”non-
predictable relevant object/class in relevant location”.
Based on this definition, a corner case detection
framework was presented to calculate a corner case
score based on video sequences. The authors of (Bre-
itenstein et al., 2020) subsequently developed a sys-
tematization of corner cases, in which they divide cor-
ner cases into different levels and according to the de-
gree of complexity. In addition, examples were given
for each corner case level. This was also the basis
for a subsequent publication with additional exam-
ples (Breitenstein et al., 2021). Since the approach
in these references is camera-based, a categorization
of corner cases at sensor level was adapted by (Hei-
decker et al., 2021), where RADAR and LiDAR sen-
sors were also considered. Furthermore, this refer-
ence presents a toolchain for data generation and pro-
cessing for corner case detection.
Outside normal parameters also includes terms
such as anomalies, novelties, or outliers, which, ac-
cording to (Heidecker et al., 2021), correlate strongly
with the term corner case. In road traffic, the detec-
tion of new and unknown objects, anomalies or ob-
stacles, which must also be evaluated as ’outside the
operating parameters’, is essential. To measure the
performance of methods for detecting such objects,
the benchmark suite ”SegmentMeIfYouCan” was cre-
ated (Chan et al., 2021a; Chan et al., 2021b). In ad-
dition, the authors present two datasets for anomaly
and obstacle segmentation to help autonomous vehi-
cles better assess safety-critical situations.
In summary, the term ”corner case” can encom-
pass rare and unusual situations that may include
anomalies, unknown objects or outliers which are out-
side of operating parameters. Outside the operating
parameters, in the context of machine learning, means
that these situations or objects were not part of the
training data.
CHIRA 2022 - 6th International Conference on Computer-Human Interaction Research and Applications
42
semantic driver
safety driver
true
CNN
Corner
Cases
intervention
CARLA
manual
control
computer output human decision
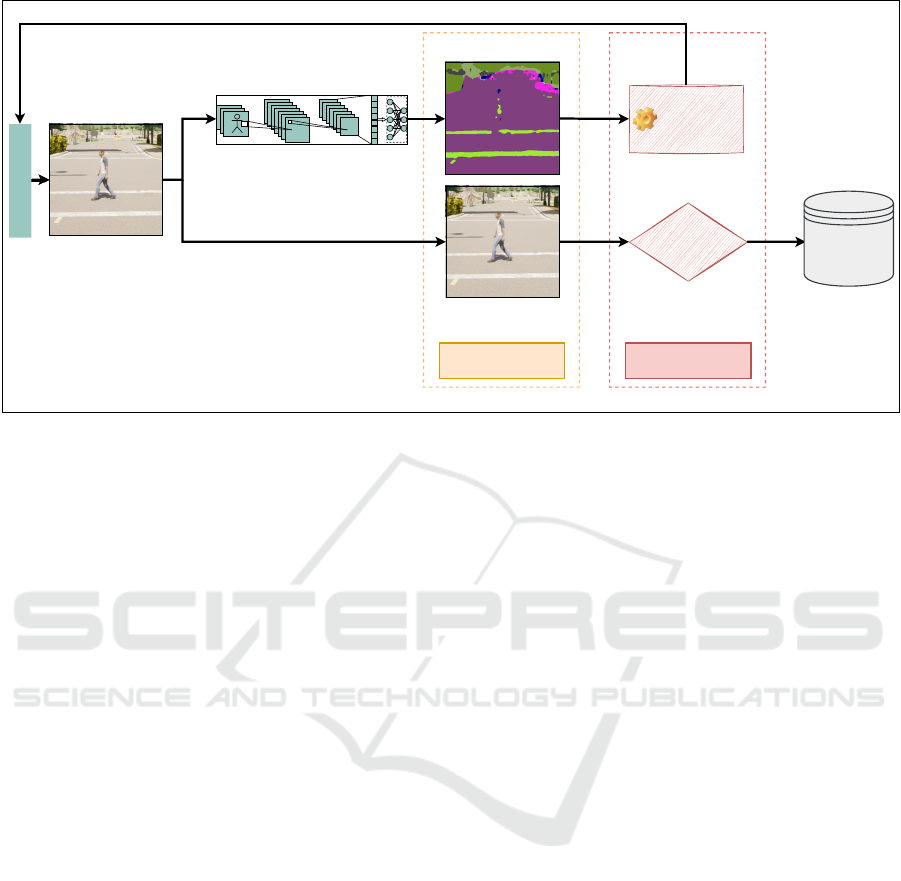
Figure 3: Two human subjects can control the ego vehicle. The semantic driver moves the vehicle in compliance with traffic
rules in the virtual world and sees only the output of the semantic segmentation network. The safety driver, who sees only
the original image, assumes the role of a driving instructor and intervenes in the situation by braking or changing the steering
angle as soon as a hazardous situation occurs. Intervening in the current situation indicates poor situation recognition of the
segmentation network and represents a corner case. Triggering a corner case ends the acquisition process and a new run can
be started.
2.2 Human-centered AI
According to the Defense Advanced Research Project
Agency (DARPA), the development of AI systems is
divided into 3 waves (Defense Advanced Research
Projects Agency, 2018; Highnam, 2020). While in
the first wave patterns were recognized by humans
and linked into logical relationships (crafted knowl-
edge), statistical learning could be used in the sec-
ond wave due to improved computing power and in-
creased memory capacity.
We are currently in the third wave, which relates
to the explainability and contextual understanding of
AI. Here, the black-box approaches, which emerged
in the second wave, are to be understood so that
AI decision-making becomes comprehensible to hu-
mans. This last point is therefore also an important
one in the HCAI initiative, which aims to connect
different domains with human-centered AI (Li and
Etchemendy, 2018).
On this basis, the authors of (Xu, 2019; Xu et al.,
2022) developed an extended HCAI framework that
defines the following three different design goals for
the human-centered AI: Ethically Aligned Design that
avoid biases or unfairness of AI algorithms such that
these algorithms make decisions according to human
criteria and rules. Technology Design which consid-
ers human and machine intelligence to exploit syn-
ergies. Human Factors Design to make AI-solutions
explainable. The aim is to give humans an insight
into the decision-making process of AI algorithms, so
that trust in the current technology can be increased.
For this purpose, we have built a specially developed
test rig to incorporate human behavior into the further
development of AI in the field of autonomous driv-
ing. At the same time, we would like to use the test
rig to provide a demonstration object to illustrate AI
algorithms to society. The focus will be on allow-
ing humans to visually perceive and interact with the
decision-making of AI algorithms. In the context of
autonomous driving this would mean: driving with
the eyes of AI.
2.3 Human-in-the-Loop Approaches
As we are in the third wave of AI systems, there has
been increased interest in human-in-the-loop (HITL)
and machine learning approaches, where humans in-
teract with machines to combine human and ma-
chine intelligence to solve a given problem (Wu et al.,
2022). For this purpose simulators were used to im-
prove AI systems by means of human experience or to
study human behavior in field trials, which will now
be briefly summarized.
The use of simulators and human drivers is ap-
plied in reinforcement learning, where an agent learns
faster from human experience. For instance, the au-
thors of (Wu et al., 2021) propose a real-time Deep
Reinforcement Learning (Hug-DRL) method based
on human guidance, where a person can intervene
A-Eye: Driving with the Eyes of AI for Corner Case Generation
43
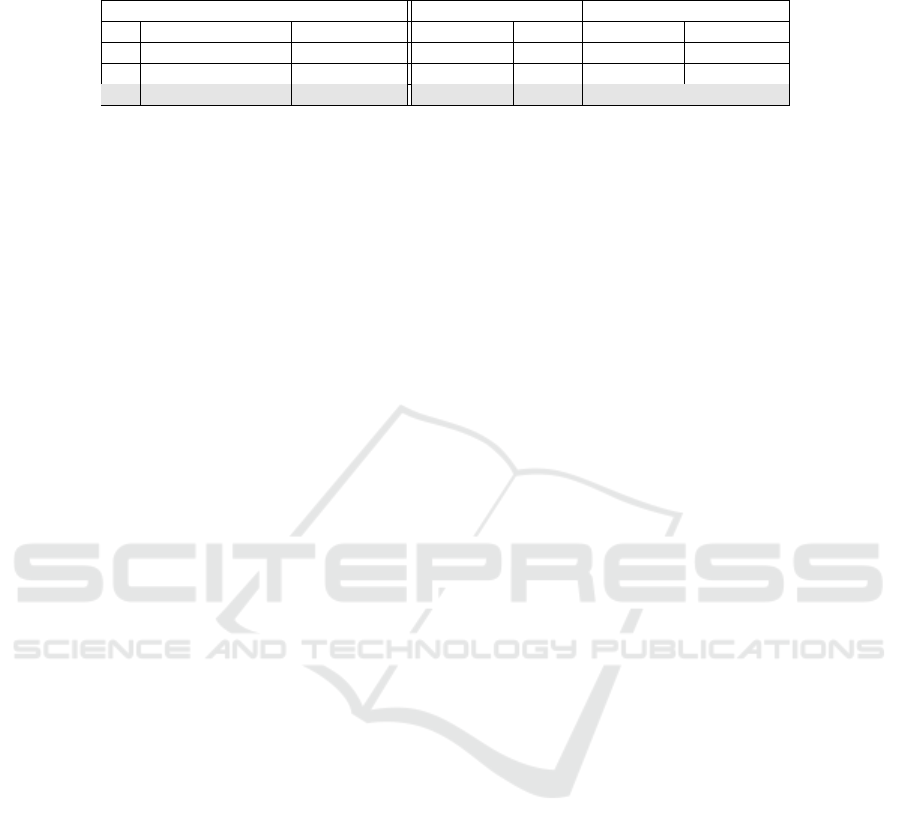
Table 1: Performance measurement on two test datasets. The comparison shows that the addition of safety-critical scenes in
training also improves performance in testing with safety-critical scenes.
traindata safety-critical testdata natural distributed testdata
no. name mean
pixels/scene
IoU
pedestrians
mIoU IoU
pedestrians
mIoU
1 natural distribution 3583.6 0.4600 0.6954 0.4937 0.761
2 pedestrian enriched 6101.1 0.5399 0.6911 0.5586 0.7554
3 corner case enriched 6215.7 0.5683 0.7173 0.5384 0.7517
in driving situations when the agent makes mistakes.
These driving errors can be fed directly back into the
agents’ training procedure and improve the training
performance significantly. Furthermore, a method for
generating decision corner cases for connected and
automated vehicles (CAVs) for testing and evaluation
purposes is proposed in (Sun et al., 2021). For this,
the behavioral policy of background vehicles (BV) is
learned through reinforcement learning and Markov’s
decision process, which leads to a more aggressive
interaction with the CAV which forces more corner
cases under test conditions. The tests take place on
the highway and include lane changes or rear-end col-
lisions.
Human behaviors can also be analyzed using driv-
ing simulators. For example, in (Driggs-Campbell
et al., 2015) a realistic test rig including a steering
wheel and pedals for data collection was developed.
Therefore, thirteen subjects were recruited to drive on
different routes while being distracted by static or dy-
namic objects or by answering messages on their cell
phones. By adding nonlinear human behaviors and
using realistic driving data, the authors have been able
to predict human driving behavior more accurately
in testing. Another driving simulator was presented
in (G
´
omez et al., 2018) to develop and evaluate safety
and emergency systems. The control units are con-
nected to a generic simulator for academic robotics
which uses the Modular Open Robots Simulation En-
gine MORSE (Echeverria et al., 2011). They used an
experiment with four road users, one human driver
and three vehicles driving in pilot mode and forc-
ing two out of 36 collision situations (a lead vehi-
cle stopped and a vehicle changing lanes) defined by
the National Traffic Safety Administration (NHTSA).
The impact of a driver assistance system on the driver
was one of the factors studied.
3 EXPERIMENTAL SETUP
3.1 Driving Simulator
Targeted enrichment of training data with safety-
critical driving situations is essential to increase the
performance of AI algorithms. Since the genera-
tion of corner cases in the real world is not an op-
tion for safety reasons, generation remains in the syn-
thetic world, where specific critical driving situations
can be simulated and recorded. For this purpose, the
autonomous driving simulator CARLA (Dosovitskiy
et al., 2017) is used. It is open-source software for
data generation and/or testing of AI algorithms. It
provides various sensors to describe the scenes such
as camera, LiDAR and RADAR and delivers ground
truth data. CARLA is based on the Unreal Engine
game engine (Epic Games, 1998), which calculates
and displays the behavior of various road users while
taking physics into account, thus enabling realistic
driving. Furthermore, the world of CARLA can be
modified and adapted to one’s own use case with the
help of a Python API.
For our work, we used the API to modify the script
for manual control from the CARLA repository. In
doing so, we added another sensor, the inference sen-
sor, which evaluates the CARLA RGB images in real-
time and outputs the neural network semantic pre-
diction on the screen. An example is shown in Fig-
ure 1. By connecting a control unit including a steer-
ing wheel, pedals and a screen, to CARLA, we make
it possible to control a vehicle with ’the eyes of the
AI’ in the synthetic world of CARLA. We also con-
nected a second control unit with the same compo-
nents to the simulator, so that it is possible to control
the same vehicle with 2 different control units, see
Figure 2. The second control unit is thus operated on
the basis of CARLA clear image and can intervene
at any time. It always has priority and triggers that
the past 3 seconds of driving, which are buffered, are
written to the dataset on the hard disk. In order for the
semantic driver to follow the traffic rules in CARLA,
the script had to be modified additionally. The code
has been modified to display the current traffic light
phase in the upper right corner and the speed in the
upper center.
3.2 Test Rig
The test rig consists of the following components: a
workstation with CPU, 3x GPU Quadro RTX 8000,
2 driving seats, 2 control units (steering wheel with
pedals), one monitor for each control unit and two
monitors for the control center. The driving simula-
CHIRA 2022 - 6th International Conference on Computer-Human Interaction Research and Applications
44

Figure 4: Two examples of a corner case where the safety driver had to intervene to avoid a collision due to the poor prediction
of the semantic segmentation network.
tor software used is the open-source software CARLA
version 0.9.10.
3.3 Dataset for Initial Training and
Testing
For training, a custom dataset was generated us-
ing CARLA 0.9.10, consisting of 85 scenes with
60 frames each. In addition, there is a validation
dataset with 20 scenes. The dataset was generated
on seven maps with one fps and contains the cor-
responding semantic segmentation image in addition
to the rendered synthetic image. The maps include
the five standard maps in CARLA and two additional
maps that offer a mix of city, highway and rural driv-
ing. Various parameters can be set in CARLAmi
we focused on the number of Non-Player-Characters
(NPCs), including cars, motorcycles, bicycles and
pedestrians, and on environment parameters such as
sun position, wind and clouds. Depending on the size
of the map, the number of NPCs ranged from 50 to
150.
The clouds and wind parameters can be set in the
range between 0 and 100, with 100 being the high-
est value. The wind parameter is responsible for the
movement of tree limbs and passing clouds and was in
the range of 0 and 50. The cloud parameter describes
the cloudiness, where 0 means that there are no clouds
at all and 100 that the sky is completely covered with
clouds. We have chosen values between 0 and 30. The
altitude describes the angle of the sun in relation to the
horizon of the CARLA world, with values between
−90 (midnight) and 90 (midday). Values between 20
and 90 were used for our purpose. The other environ-
mental parameters like rain, wetness, puddles or fog
are set to zero. The parameters are chosen so that the
scenes reflect everyday situations with a natural scat-
tering of NPCs and in similar good weather. During
data generation, the movement of all NPCs was con-
trolled by CARLA.
Furthermore, 21 corner case scenes were used as
test data, each containing 30 frames. Another test
dataset containing 21 standard scenes without cor-
ner cases serves as a comparison, each containing 30
frames.
3.4 Training
To drive on the predicted semantic mask, a real-time
capable network architecture is needed. For these pur-
poses, the Fast Segmentation Convolutional Neural
Network (Fast-SCNN) model was used (Poudel et al.,
2019). It uses two branches to combine spatial de-
tails at high resolution and deep feature extraction at
lower resolution achieving a mean Intersection over
Union (mIoU) of 0.68 at 123.5 fps on the Cityscapes
dataset (Cordts et al., 2016). The network was imple-
mented in the python package PyTorch (Paszke et al.,
2019) and training was done on a NVIDIA Quadro
RTX 8000 graphics card. Sixteen of the 23 classes
available in CARLA were used for training. Cross en-
tropy was used as the loss function and ADAM as the
optimization algorithm. A polynomial decay sched-
uler was also used to gradually reduce the learning
rate.
We intentionally stopped the training after 5
epochs to increase the frequency of perception errors
for the network. The resulting network is sufficiently
well trained to recognize the road and all road users,
although objects further away are poorly recognized.
An example is shown at the top of Figure 1.
3.5 Experimental Design
Two operators conducted the driving campaign and
the duration of driving as a safety driver or seman-
tic driver was set at 50:50. Both participants had
time to familiarize themselves with the hardware and
the CARLA world before the start of the first driv-
ing campaign so that driving errors could be mini-
mized. Two driving campaigns are planned; the first
campaign will generate targeted corner cases and the
second will test whether adding the corner cases in-
cluded in campaign 1 leads to an improvement in the
perception of safety-critical situations.
4 RETRIEVAL OF CORNER
CASES
For the generation of corner cases, we consider the
following experimental setup. Two test operators
A-Eye: Driving with the Eyes of AI for Corner Case Generation
45
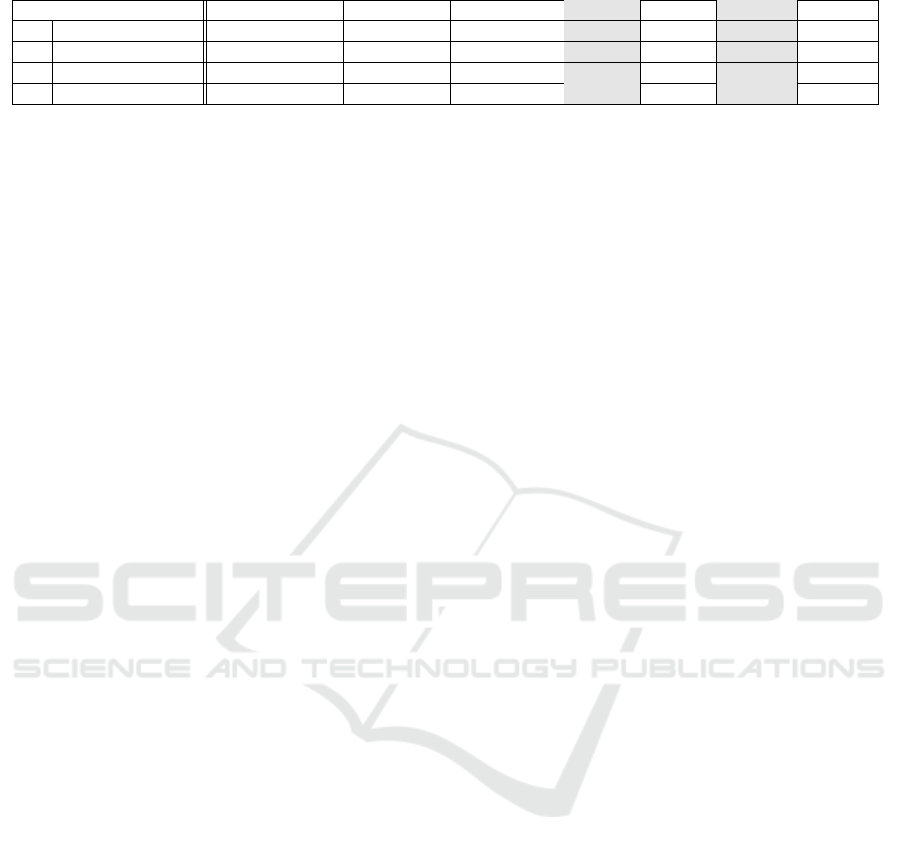
Table 2: Corner case appearances on Fast-SCNN trained with 3 different datasets.
dataset driven distance d driven time t number CCes mean
d
CC
std
d
CC
mean
t
CC
std
t
CC
no. [km] [min] [-] [km/CC] [km/CC] [min/CC] [min/CC]
1 natural distribution 121.32 411 13 7.73 14.25 25.93 39.60
2 pedestrian enriched 163.09 500 21 7.52 10.47 23.25 28.72
3 corner case enriched 153.38 528 11 13.84 8.68 47.47 31.87
record scenes in our specially constructed test rig (see
Figure 2), where one subject (safety driver) gets to
see the original virtual image and the other (semantic
driver) the output of the semantic segmentation net-
work (see Figure 1). The test rig is equipped with
controls such as steering wheels, pedals and car seats
and connected to CARLA to simulate realistic traffic
participation.
The corner cases were generated as shown in Fig-
ure 3. For this purpose, we used a real-time seman-
tic segmentation network from Section 3.4 where vi-
sual perception was limited. We note that autonomous
vehicles according to (Favar
`
o et al., 2017) 67619.81
km drive until an accident happens. Using a poorly
trained network as a part of our accelerated testing
strategy, we were able to generate corner cases af-
ter 3.34 km in average between interventions of the
safety driver. We note however that the efficiency of
the corner cases was evaluated using a fully trained
network. Figure 4 shows two safety-critical corner
cases where the safety driver had to intervene to pre-
vent a collision.
If the safety driver triggered the recording of a cor-
ner case the test operators label the corner case with
one of four options available (overlooking a walker
or a vehicle, disregarding traffic rules, intervening out
of boredom) and may leave a comment. Furthermore,
the kilometers driven and the duration of the ride are
notated. The operators were told to obey the traf-
fic rules and not to drive faster than 50 km/h during
the test drives. After a certain familiarization period,
driving errors decreased and sudden braking by the
semantic driver was also reduced. The reason for this
is that the network partially represents areas as ve-
hicles or pedestrians with fewer pixels. Over time, a
learning effect occurred in the drivers to hide such sit-
uations because experience showed that there was no
object there due to the previous frames.
The rides are tracked and by the intervention of
the safety driver the last 3 seconds of the scene are
saved. Subsequently, the scenes can be loaded and
images saved from the ego vehicle’s perspective using
the camera and the semantic segmentation sensor. We
collect 50 corner cases before retraining from scratch
with a mixture of original and corner case images. For
each corner case, the last 3 seconds are saved at 10
fps before the intervention by the safety driver. In to-
tal, we get 1500 new frames. When using this corner
case data for retraining, we delete the same number of
frames from the original training dataset.
We selected 50 corner cases in connection with
pedestrians. Therefore, the inclusion of corner case
scenes into the training dataset significantly increases
the average number of pixels with the pedestrian class
in the training data. To establish a fair comparison of
the efficiency of corner cases as compared to a sim-
ple upsampling of the pedestrian class, we created
a third dataset that contains approximately the same
number of pixels per scene for the pedestrian class as
the dataset with the corner cases, see Table 1.
5 EVALUATION AND RESULTS
All results in this section are averaged over 5 experi-
ments to obtain a better statistical validity. For testing
purposes, we generated 21 additional corner cases for
validation. With the same setup as before, we train
the Fast-SCNN for 200 epochs on all three datasets
and thereby obtain three networks. Table 1 shows the
evaluation of all three models on the class pedestrian
for the 21 safety-critical test corner cases. We see that
adding corner cases to the training data leads to an
improvement in pedestrian detection in safety-critical
situations, which can also be shown by an example
in Figure 5. There we see a situation with a pedes-
trian crossing the road, with a slope directly behind
him that seems to end the road at the level of the hori-
zon. Therefore, the networks that did not have corner
cases in the training data seem to have problems with
this situation, while the model with corner cases de-
tects the humans much better.
While training the network using naive upsam-
pling of pedestrians does not have any positive ef-
fect on the classe’s Intersection over Union (IoU) as
compared with the original training data, we achieve a
gain in the IoU by 2.19% when using the dataset con-
taining corner cases. In addition, the 3 models were
tested on a dataset with a natural distribution of pedes-
trians. Here it can be seen that the model trained with
corner cases does not perform as well as the model
with the same number of pedestrians. It follows that
the model performs better in critical situations, while
the models without corner cases perform less well.
Since our method for generating corner cases in
safety-critical situations provides an improvement in
CHIRA 2022 - 6th International Conference on Computer-Human Interaction Research and Applications
46

corner case enriched. natural disribution. pedestrian enriched. ground truth.
Figure 5: Evaluation on corner case test data shows that the model using corner case data in training recognizes pedestrians
better than the model trained with the natural distributed dataset or the dataset which contains more pedestrians.
detecting pedestrians in safety-critical situations, we
launched a second campaign to verify how long it
takes driving with the 3 trained networks to generate
a corner case. When conducting the second driving
campaign, the same operating parameters were set as
in the first campaign and the duration until a corner
case occurred was recorded. This includes the same
maps and weather conditions as well as the same two
drivers. However, the two drivers were not aware of
the network’s underlying training data. Table 2 shows
the duration and kilometers driven for the different
data sets, as well as the occurrence of corner cases
during these rides. We see that adding corner cases
during training also reduces the frequency until new
corner cases reappear.
We therefore demonstrated the benefits of our
method to generate corner cases, especially for safety-
critical situations. We were also able to show that
adding safety-critical corner cases recorded by inten-
tional perceptional distortions improves performance,
so future datasets should include such situations.
6 CONCLUSION
Due to the lack of explanation and transparency in the
decision-making of today’s AI algorithms, we devel-
oped an experimental setup that allows to visualize
these decisions and thus to allow a human driver to
evaluate the driving situations while driving with the
eyes of AI, and from this to extract data that includes
safety-critical driving situations. Our self-developed
test rig provides two human drivers controlling the
ego vehicle in the virtual world of CARLA. The se-
mantic driver receives the output of a semantic seg-
mentation network in real-time, based on which she
or he is supposed to navigate in the virtual world. The
second driver takes the role of the driving instructor
and intervenes in dangerous driving situations caused
by misjudgments of the AI. We consider driver inter-
ventions by the safety driver as safety-critical corner
cases which subsequently replaced part of the initial
training data. We were able to show that targeted
data enrichment with corner cases created with lim-
ited perception leads to improved pedestrian detection
in critical situations.
In addition, we take up the idea of the HAI frame-
work and continue the further development of AI by
means of human risk perception to identify situations
that are particularly important to humans, and thus
train the AI precisely where it is particularly chal-
lenged by a human perspective.
Future research projects include the use of net-
works of different quality, changing the weather pa-
rameters and provoking accident scenarios so that the
number of corner cases can be artificially increased
in test operation. In addition, multi-screen driving
should be expanded to increase the field of view
(FOV) for a more realistic driving experience. The in-
tervention of the safety driver in the driving situation
will also be observed. To this end, criteria for mea-
suring human-machine interaction (HMI) will be de-
veloped to track, for example, latency, attention, and
intervention due to boredom of the drivers. In addi-
tion, contextual and personal factors of human drivers
will be investigated to assess uncertainty or anxiety
while driving.
ACKNOWLEDGEMENTS
The research leading to these results is funded by
the German Federal Ministry for Economic Affairs
and Climate Action within the project KI Data Tool-
ing under the grant number 19A20001O. We thank
Matthias Rottmann for his productive support, Natalie
Grabowsky and Ben Hamscher for driving the streets
of CARLA and Meike Osinski for the support in the
field of human-centered AI.
REFERENCES
Bolte, J.-A. et al. (2019). Towards Corner Case Detection
for Autonomous Driving. In 2019 IEEE Intelligent
Vehicles Symposium, IV 2019, Paris, France, June 9-
12, 2019, pages 438–445. IEEE.
Breitenstein, J. et al. (2020). Systematization of corner
cases for visual perception in automated driving. In
A-Eye: Driving with the Eyes of AI for Corner Case Generation
47

IEEE Intelligent Vehicles Symposium, IV 2020, Las
Vegas, NV, USA, October 19 - November 13, 2020,
pages 1257–1264. IEEE.
Breitenstein, J. et al. (2021). Corner cases for visual per-
ception in automated driving: Some guidance on de-
tection approaches. CoRR, abs/2102.05897.
Chan, R. et al. (2021a). SegmentMeIfYouCan: A Bench-
mark for Anomaly Segmentation. In Thirty-fifth Con-
ference on Neural Information Processing Systems
(NeurIPS) Datasets and Benchmarks Track.
Chan, R., Rottmann, M., and Gottschalk, H. (2021b). En-
tropy maximization and meta classification for out-of-
distribution detection in semantic segmentation. In
Proceedings of the IEEE/CVF International Confer-
ence on Computer Vision, pages 5128–5137.
Chipengo, U., Krenz, P., and Carpenter, S. (2018). From
antenna design to high fidelity, full physics automotive
radar sensor corner case simulation. Modelling and
Simulation in Engineering, 2018:1–19.
Cordts, M. et al. (2016). The cityscapes dataset for semantic
urban scene understanding. In Proc. of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Defense Advanced Research Projects Agency
(2018). AI Next Campaign. Available:
https://www.darpa.mil/work-with-us/ai-next-
campaign. Accessed 07-Jun,-2022.
Dosovitskiy, A. et al. (2017). CARLA: an open urban driv-
ing simulator. In 1st Annual Conference on Robot
Learning, CoRL 2017, Mountain View, California,
USA, November 13-15, 2017, Proceedings, volume 78
of Proceedings of Machine Learning Research, pages
1–16. PMLR.
Driggs-Campbell, K., Shia, V., and Bajcsy, R. (2015). Im-
proved driver modeling for human-in-the-loop vehicu-
lar control. In 2015 IEEE International Conference on
Robotics and Automation (ICRA), pages 1654–1661.
Echeverria, G. et al. (2011). Modular open robots simula-
tion engine: Morse. In 2011 IEEE International Con-
ference on Robotics and Automation, pages 46–51.
Epic Games (1998). Unreal Engine. Available:
https://www.unrealengine.com.
Favar
`
o, F. M. et al. (2017). Examining accident reports
involving autonomous vehicles in california. PLOS
ONE, 12:1–20.
G
´
omez, A. E. et al. (2018). Driving simulator platform for
development and evaluation of safety and emergency
systems. Cornelll University Library.
Heidecker, F. et al. (2021). An Application-Driven Concep-
tualization of Corner Cases for Perception in Highly
Automated Driving. In 2021 IEEE Intelligent Vehi-
cles Symposium (IV), Nagoya, Japan.
Highnam, P. T. (2020). The defense advanced research
projects agency’s artificial intelligence vision. AI
Magazine, 41:83–85.
Karpathy, A. (2021). Cvpr 2021 workshop on autonomous
driving, keynote. In IEEE Conference on Computer
Vision and Pattern Recognition Workshops, CVPR
Workshops 2021, virtual, June 19-25, 2021.
Li, F.-F. and Etchemendy, J. (2018). Introducing Stan-
ford’s Human-Centered AI Initiative. Available:
https://hai.stanford.edu/news/introducing-stanfords-
human-centered-ai-initiative. Accessed 03-Jun,-2022.
Paszke, A. et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. In Advances
in Neural Information Processing Systems 32, pages
8024–8035. Curran Associates, Inc.
Poudel, R. P. K. et al. (2019). Fast-scnn: Fast semantic seg-
mentation network. In 30th British Machine Vision
Conference 2019, BMVC 2019, Cardiff, UK, Septem-
ber 9-12, 2019, page 289. BMVA Press.
Sun, H. et al. (2021). Corner case generation and analysis
for safety assessment of autonomous vehicles. Trans-
portation Research Record, 2675(11):587–600.
Wu, J. et al. (2021). Human-in-the-loop deep reinforce-
ment learning with application to autonomous driving.
CoRR, abs/2104.07246.
Wu, X. et al. (2022). A survey of human-in-the-loop for ma-
chine learning. Future Generation Computer Systems,
135:364–381.
Xu, W. (2019). User-centered design (iv): Human-centered
artificial intelligence. Journal of Applied Psychology,
25:291–305.
Xu, W. et al. (2022). Transitioning to human interaction
with ai systems: New challenges and opportunities
for hci professionals to enable human-centered ai. In-
ternational Journal of Human-Computer Interaction,
pages 1–25.
CHIRA 2022 - 6th International Conference on Computer-Human Interaction Research and Applications
48
