Sensitivity and Permissible Deviation in Electric Track Circuits
Yuri I. Zenkovich and Anton А. Antonov
Russian University of Transport RUT (MIIT), Moscow, Russia
Keywords: Track circuit, permissible deviation of parameters, input resistance stabilization, input impedance.
Abstract: New expressions have been obtained for assessing the sensitivity and permissible deviations of the electric
track circuit elements parameters, allowing to evaluate their influence on the implementation of the shunt
and control modes of operation of the track circuits.
1 INTRODUCTION
Track circuits in railway automation devices are
used as the main sensor for monitoring the state of
the rail line. There are three main states of the rail
line. The rail line (RL) is free of rolling stock, the
RL is occupied by rolling stock, the RL has a break
in one of the rails. These states have the
corresponding names: normal, shunt and control
modes of operation of the track circuit. The
determining modes of operation in terms of meeting
the requirements for the safety of train traffic are
shunt and control modes. Failure to comply with
these modes leads to catastrophic failures in the
transportation of passengers and goods by rail
(Lisenkov, 1999; Lee, 2013; Moine, 2019; Spunei,
2018; Efanov, 2019).
It is known that the task of synthesizing track
circuits is to determine the maximum length of the
rail line and the input resistance at the ends of the
rail line, in which the shunt and control modes are
performed. Energy ratios, which are associated with
the optimization of the transmission of electrical
energy from one (transmitter) end of the rail line to
the other (relay) end, are secondary.
The choice of the input resistance value at the
ends of the electric rail line is due to the
simultaneous fulfillment of the criteria of the shunt
mode
К
𝑠
=𝑓
(
𝑍
in
)
and the control К
𝑐
=𝑓
(
𝑍
in
)
for the maximum allowable length of the rail line.
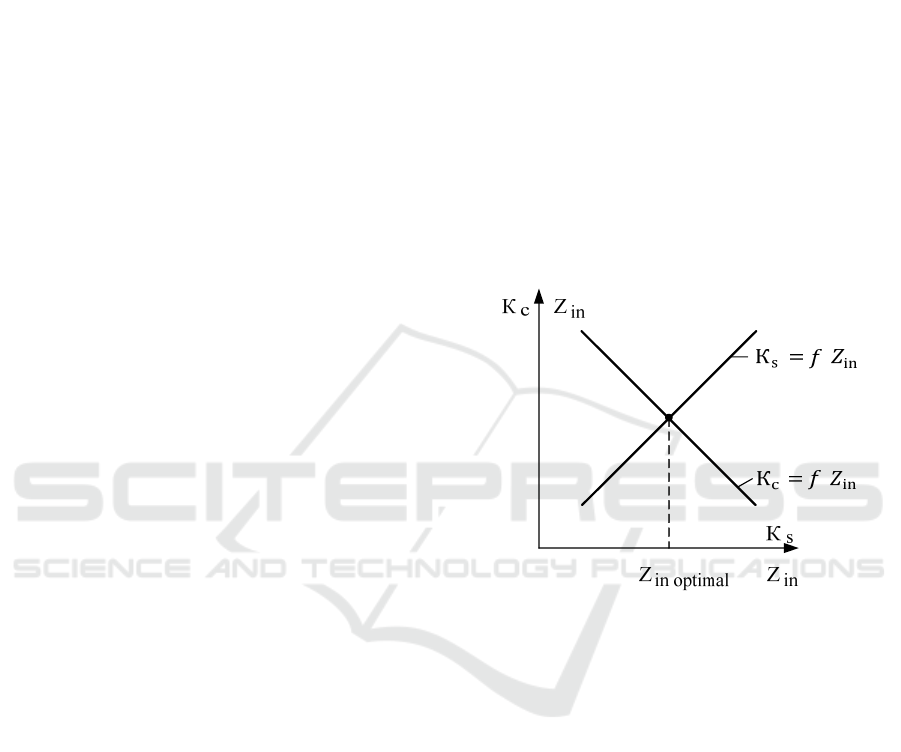
Figure 1 shows the dependences of the criteria for
the shunt and control modes of operation of the track
circuit on the input resistances at the ends. (Arkatov,
1990)
Figure 1: The dependences of the criteria for the shunt and
control modes of operation of the track circuit.
As can be seen from Figure 1, the dependences
under consideration represent mutually inverse
functions, so the intersection point determines the
optimal value of
𝑍
in
at which the shunt and control
modes are performed. It also follows from the graph
that the deviation from the optimal value leads to an
improvement in one of the modes and a deterioration
in the other.
To exclude catastrophic failures due to violation
of the operating modes of track circuits, it is
necessary to stabilize the input resistances at the
ends of the rail line. However, in the operation of
track circuits, situations occur that the input
resistances at the ends of the track line are subject to
change. At the same time, it is important that the
changes are within the specified tolerances, so that
with the accepted tolerances, taking into account the
accepted safety factors, the specified modes are
ensured.
Zenkovich, Y. and Antonov, A.
Sensitivity and Permissible Deviation in Electric Track Circuits.
DOI: 10.5220/0011587100003527
In Proceedings of the 1st International Scientific and Practical Conference on Transport: Logistics, Construction, Maintenance, Management (TLC2M 2022), pages 355-358
ISBN: 978-989-758-606-4
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
355
At the second stage of the synthesis of track
circuits, the configuration of the input resistances of
the track circuit is selected based on the given
impedance of the input resistance. When choosing
elements to create a given impedance, energy
relationships are taken into account, but issues
related to the analysis of tolerances that determine
the effect of deviation of any parameter of the input
resistance impedance from its nominal value are not
taken into account.
2 MATERIALS AND METHODS
At the second stage of the synthesis of track circuits,
the problem of tolerances is associated with the
choice of such equivalent circuits that have minimal
tolerances. In the case of structural synthesis, the
achievement of minimum tolerances can be
considered as an independent task. This problem can
be partially solved by using the methods of analysis
and synthesis, however, significantly new results can
be obtained if the knowledge of tolerances is used in
the optimization process in the structural synthesis
of input resistances at the ends of the rail line.
Changing the input impedance values of the
track circuit elements is undesirable from the point
of view of tolerance theory. However, this
disadvantage can be used as a positive factor in
optimization. The connection between the parameter
space of input resistance impedance elements and
tolerance optimization is carried out using the
sensitivity of the circuit function (Lanne, 1969),
which can be defined as a partial derivative:
𝑆
=
𝑑 𝑦
𝑑 𝑥
=
𝜕 𝑍
𝜕 𝑍
(1)
Sensitivity plays an important role in
determining the parameters of the circuit elements of
the input resistance
𝑍
in
depending on the
configuration of the electrical circuit and the values
of its elements
𝑍
𝑖
. Thus, the sensitivity of the
characteristic of the input impedance of the end of
the track circuit is a function of the parameter
𝑍
𝑖
.
The deviation of the characteristic of the input
resistance
𝑍
𝑖
from the optimal values is defined as
∆𝑍
=𝑆
∆𝑍
(2)
The relative sensitivity, in turn, can be defined
as:
𝑆
=
𝜕ln𝑍
𝜕𝑙𝑛𝑍
=
𝑍
𝑍
𝑆
=𝑆
(
𝑍
,𝑍
)
(3)
The relative deviation of the input resistance 𝑍
𝑖
is equal to
∆Z
𝑍
=𝑆
∆Z
𝑍
(4)
When calculating the electrical circuit of the
input resistance, it is assumed to use, first of all,
relative units (Ablin, 1970; Holt, 1969).
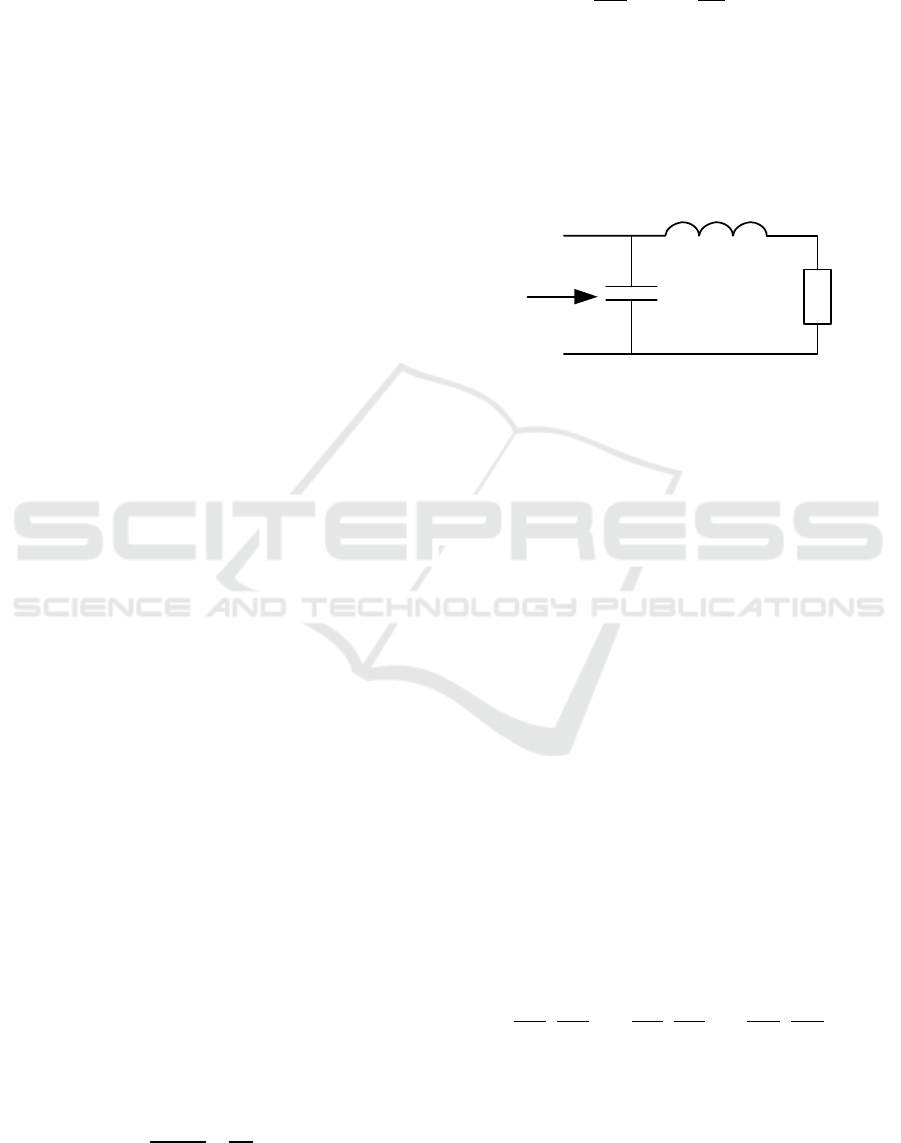
Consider the issue of using relative units on the
example of the circuit shown in Figure 2.
Figure 2: Circuit input impedance.
For the presented circuit in Figure 2, arbitrary
circuits can be obtained by choosing the normalized
values R, L, C, ω in relative units. With an increase
in λ times the units of measurement, and the
simultaneous invariance of the unit of measurement
of the frequency ω, the impedance of the input
resistance
𝑍
𝑖
will increase by λ times. For the
convenience of mathematical analysis, we separate
the values of resistance, inductance and capacitance
in the impedance
𝑍
𝑖
.
We introduce the reciprocal values of the
capacitance and denote them by D. Then we obtain
the expression for the impedance
𝑍
=𝑍(𝑅
…𝑅
,𝐿
…𝐿
,𝐷
….D
,𝜔), where 𝑁
+
𝑁
+𝑁
=𝑁.
For the impedance, the following relationship
holds.
𝑍
=𝑍
(
𝜆𝑅
…𝜆𝑅
,𝜆𝐿
…𝜆𝐿
,𝜆𝐷
….𝜆𝐷
,𝜔
)
=𝜆𝑍
(
𝑅
…𝑅
,𝐿
…𝐿
,𝐷
….D
,𝜔
)
(5)
𝑍
=𝑍
(
𝜆𝑅
…𝜆𝑅
,𝜆𝐿
…𝜆𝐿
,𝜆𝐷
….𝜆𝐷
,𝜔
)
=𝜆𝑍
(
𝑅
…𝑅
,𝐿
…𝐿
,𝐷
….D
,𝜔
)
Z – linear homogeneous function of variables R, L, D.
Differentiating Eq. (5) with respect to λ, we obtain:
𝜕𝑍
𝜕𝜆𝑅
∙
𝜕𝜆𝑅
𝜕𝜆
+
𝜕𝑍
𝜕𝜆𝐿
∙
𝜕𝜆𝐿
𝜕𝜆
+
𝜕𝑍
𝜕𝜆𝐷
∙
𝜕𝜆𝐷
𝜕𝜆𝐷
=𝑍
(6)
From expression (6), expression (7) follows
L
C
R
Z
in
TLC2M 2022 - INTERNATIONAL SCIENTIFIC AND PRACTICAL CONFERENCE TLC2M TRANSPORT: LOGISTICS,
CONSTRUCTION, MAINTENANCE, MANAGEMENT
356

𝑅
𝑍
∙
𝜕𝑍
𝜕𝜆𝑅
+
𝐿
𝑍
∙
𝜕𝑍
𝜕𝜆𝐿
+
𝐷
𝑍
∙
𝜕𝑍
𝜕𝜆𝐷
=1
(7)
Using expressions (1), (2) and (3) together with
expression (7), we obtain (8).
𝑆
(
𝑍
,𝑅
)
+𝑆
(
𝑍
,𝐿
)
+
𝑆
(
𝑍
,𝐷
)
=1
(8)
In another way, using the common sign of the
sum, we get:
𝑆
(
𝑍
,𝑍
)
=1
(9
)
Using expression (9), the sum of the relative
sensitivities of the impedance
𝑍
𝑖
, considering it with
respect to R, L, and also D=1/C, is equal to 1. Using
the sensitivity invariant, a number of useful results
can be obtained when solving the problem of
optimizing the input resistances at the ends of the
rail line, in particular when calculating the input
impedance having a minimum sensitivity
(Fjallbzant, T. 1969; Tomovich, 1972; Nekrasov,
2001; Nekrasov, 2002).
When analyzing tolerances for deviations of
input resistances at the ends of a rail line, various
assumptions can be made regarding the law of
addition of partial deviations Δ𝑍
=𝑆
Δ𝑍
. But at
the same time, the issue of calculating the worst case
deviation of the input resistance can be considered
∆𝑍
𝜀=
|
𝑆
||
𝛥𝑍
|
=
|
𝑆
|
𝑑
(10)
ε defines the maximum allowable deviation, and
𝑑
is the maximum change in the value of the circuit
element. This method can be used in the synthesis of
track circuits in the case of deterministic deviations
of the input resistance elements, when the number of
elements included in the electrical circuit is not
large.
From expression (10) 𝑑
is determined according
to the following algorithm. We accept that the
maximum permissible deviation ε and sensitivity 𝑆
are known. We also accept that for all elements of
the circuit the absolute values of partial deviations
|
𝑆
|
𝑑
will be the same. Thus, there is a chain with a
uniform distribution of partial deviations. Then it is
possible to determine partial deviations, knowing the
ratio of the maximum permissible deviation ε to the
number of circuit elements N:
𝜀
𝑁
=
|
𝑆
|
𝑑
(11)
From here we can calculate the absolute
tolerance of the electrical circuit element
𝑑
=
𝜀
𝑁
|
𝑆
|
(12)
3 CONCLUSIONS
Summing up the above reasoning, we can conclude
that if the corresponding sensitivity is small, then the
circuit element will have a large tolerance and vice
versa. Each element of the circuit makes the same
contribution to the deviation of the characteristic of
the circuit. When the number of circuit elements is
large (more than 5 in practice), relation (12) gives
very small tolerances for the electrical circuit
elements. (Nekrasov, 2016; Lisenkov, 2014).
In the case of statistical calculation of deviation
tolerances and input resistances, partial deviations
can be considered as random variables, and a certain
probability of failures (rejection) is allowed. The
input resistance circuit is rejected if
|
∆𝑍
|
=𝑆
∆𝑍
𝜀
(13)
To determine the probability 𝑃(
|
∆Z
|
𝜀) of
rejection, we introduce a random variable μ and
determine the basic properties and addition laws of
this variable. Assume the existence of a probability
density function μ and denote this function by P(x).
Then the probability of an event μ <x is defined as
𝑃
(
𝜇𝑥
)
=𝑃
(
𝑥
)
𝑑𝑥
(14)
and the mathematical expectation will look like
М
(
𝜇
)
=𝑥𝑃
(
𝑥
)
𝑑𝑥
(15)
In turn, the variance will be defined as
𝐷
(
𝜇
)
=𝑀
𝜇𝑀
𝜇
=
(
𝜇𝑀𝜇
)
𝑃
(
𝑥
)
𝑑𝑥
(16)
When calculating deviation tolerances
statistically, it is necessary to know the actual
distribution of the parameters of the elements
included in the electrical circuit of the input
impedance of the end of the rail line. (Nekrasov,
2001)
Sensitivity and Permissible Deviation in Electric Track Circuits
357

However, with the real distribution of element
parameters, one can always associate the Gaussian
distribution with the same mathematical expectation
and variance. Then statistical calculations can be
easily carried out for the obtained tolerances of
deviations of input resistances at the ends of the rail
line.
REFERENCES
Lisenkov, V. M., 1999. Statistical theory of train traffic
safety. p. 325.
Lee, M.-C., Park, J.-Y., 2013. A study on the length of
electrical separation joint in AF track circuit.
Transactions of the Korean Institute of Electrical
Engineers. 62 (1). pp. 70-75.
Moine, E. H., Hassane, M., Marouane, E. A., 2019.
Parameter estimation and fault diagnosis for
compensation capacitators in ZPW-2000 jointless
track circuit. International Conference on Wireless
Technologies, Embedded and Intelligent Systems,
WITS 2019. 8723777.
Spunei, E., Piroi, I., Muscai, C., Răduca, E., Piroi, F.,
2018. Track circuits diagnosis for railway lines
equipped with an automatic block signalling system.
IOP Conference Series: Materials Science and
Engineering. 294(1), 012014.
Efanov, D. V., Osadchy, G. V., Khoroshev, V. V.,
Shestovitskiy, D. A., 2019. Diagnostics of Audio-
Frequency Track Circuits in Continuous Monitoring
Systems for Remote Control Devices: Some Aspects.
IEEE East-West Design and Test Symposium on
Electromagnetic Compatibility. 8872092, pp. 550-555
Arkatov, V. S., Kravtsov, Yu. A., Stepenskiy, B. M., 1990.
Track circuits. Analysis of work and maintenance. p.
295.
Lanne, A. A., 1969. Optimal synthesis of linear electrical
circuits. p. 301.
Ablin, A. I., Khotuntsev, Yu. L., 1970. Stability of a
regenerative amplifier with a spread of all
parameters. XIII. 11. pp. 1389-1391.
Holt, A. C., Lee, M. R., 1969. General Rule for the
Compensation of the Sensitivity of Networks to its`
Active Devices. Electron Letters. 5. 14. pp. 324-325.
Fjallbzant, T. 1969. Active Network Synthesis. Ericsson
Technics, Stockholm. 1. pp. 3-52.
Tomovich, R., Vukobratovich, M., 1972. General theory
of sensitivity. p. 360.
Nekrasov, S. A., 2001. Interval methods and algorithms of
global nonlinear optimization and their application to
designing electrotechnical devices. Part I.
Elektrichestvo. 8. pp. 43-49.
Nekrasov, S. A., 2002. Using the interval and bilateral
methods for optimizing the design of electro-magnets
under conditions of inexact specified initial data. Part
2. Elektrichestvo. 7, pp. 54-58.
Nekrasov, S. A., 2016. A numerical method for solving
dynamical systems with lumped parameters which
accounts for an input data error. Journal of Applied
and Indus- trial Mathematics, 10 (4), pp. 528-537.
Lisenkov, V. M., 2014. Methods for analysis and synthesis
of track circuits (statistical approach). p. 221.
TLC2M 2022 - INTERNATIONAL SCIENTIFIC AND PRACTICAL CONFERENCE TLC2M TRANSPORT: LOGISTICS,
CONSTRUCTION, MAINTENANCE, MANAGEMENT
358
