
Design System of Structural Health Monitoring System Using
Wireless Sensor Network
Aris Budiyarto, Abyanuddin Salam and Bayan Naufal
Automation and Mechatronics Department, Politeknik Manufaktur Bandung, Bandung, Indonesia
Keywords: SHMS, WSN, Web Based Monitoring, Static Routing, Linear Communication Topology.
Abstract: This research discusses a system design of a Structure Health Monitoring System (SHMS) using Wireless
Sensor Network (WSN) which has successfully performed its main function of reading sensor data from each
node for web based monitoring. The system consists of 4 types of sensor which are temperature humidity
sensor (DHT11), Accelerometer Gyro sensor (GY521), strain sensor (Load Cell), and two kinds of
displacement sensor (TOF and US100). The microcontroller used is WemosD1 mini and ESP32. The system
works with a linear communication topology with a static routing protocol. Active alarms that indicate if the
sensor values exceed the upper or lower limits of the system is successfully carried out. The error of the testing
which carried out by DHT 11 sensor is below 2.3%. While the testing error of the GY521 is below 7%. 0.58%
is the error for load cell. And the overall error of TOF and US100 is below 1%. For latency data reading on
the website at the DHT11, GY521, Load Cell, TOF, and US100 sensors are 4.35%, 1.96%, 4.68%, 2.11%,
and 7.68%. The latency data varies due to data transmission errors from nodes and internet network instability
for the website.
1 INTRODUCTION
Bridges are an example of complex infrastructure in
structures from civil engineering. Infrastructure
cannot be easily predicted in the event of damage or
anomalous conditions. The cause of infrastructure
damage that needs to be considered is the loss of life.
According to research (Amalina, 2016), there are
several bridge infrastructure damage events that
cause casualties, including an incident that occurred
in Nepal on December 25, 2007. On that day, the
Chhinchu Suspension Bridge, which is 187 meters
long, was overloaded as a result resulting in 13 dead
and 32 injured. Furthermore, the collapse of the Kutai
Kertanegara Bridge on November 26, 2011 is an
incident that shows how important monitoring and
scheduled maintenance are on a bridge. The incident
on the Kutai Kertanegara Bridge was caused by a load
that exceeded the limit passing through the bridge
(Arifin, 2014).
These events may be avoided if the party
concerned implements a system with technology that
is able to monitor the condition of the bridge as has
been applied in developed countries. The technology
is the Structural Health Monitoring System (Arifin,
2014). According to research (Hartono, 2001) SHMS
is a system used to observe all matters relating to the
operation and monitoring of structural health
conditions, helping to take corrective action through
manual or automatic commands by several existing
devices. Based on communication, SHMS on bridges
is divided into two types, namely wired and wireless
SHMS technology. This cable-based technology has
the advantage that the data sent back by the sensor is
very accurate and no additional electrical power is
required when the sensor is operating because
electrical power has been provided by the control
center. However, cable-based technology also has
limitations, such as the need for cabling, where
installation is a complicated job.
To reduce the cost of cabling and the number of
components used, the most suitable solution is to use
a Wireless Sensor Network (WSN) in the SHMS
system (Amalina, 2016). WSN is a network
consisting of several sensors in different locations.
This allows sensors to perform monitoring processes
on certain objects and transmit data wirelessly
(Cahya, 2016). WSN is formed from a set of small
autonomous devices with several sensors contained in
it, so this device is called a sensor node (Sutaya,
2019).
Budiyarto, A., Salam, A. and Naufal, B.
Design System of Structural Health Monitoring System Using Wireless Sensor Network.
DOI: 10.5220/0011821400003575
In Proceedings of the 5th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2022), pages 561-566
ISBN: 978-989-758-619-4; ISSN: 2975-8246
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
561

The topology and architecture of a Wireless
Sensor Network (WSN) generally depends on the
geographical area where the sensors are placed. A
Linear Wireless Sensor Network (LWSN) is a special
case, where the physical topology of the network is a
line. The applications of LWSN are diverse, e.g.
monitoring of large infrastructure such as bridges and
dams, road traffic observation, and border control
(Domga, 2019).
So this research will make about "Designing
Structural Health Monitoring System Using Wireless
Sensor Network" as an alternative solution to the
above problems. In this study, bridge supervisors are
made easier to monitor and control the bridge because
it can be monitored via the website, bridge control is
also made easier because monitoring can be real time
so that it is like in research (Abadi, 2020), which has
been able to facilitate officers in maintaining and
supervising building resources remotely, and for the
output of each sensor there will be an alarm on the
website indicating that the bridge condition is critical
according to the threshold that can be adjusted
according to the bridge environment. In WSN
routing, a communication protocol is needed between
nodes. For this protocol was chosen because of
research (Abadi, 2020), in his research using static
routing because in his research it is explained that this
type of routing is suitable for small-scale and non-
moving networks and in finding information about
the intended network is configured manually by the
admin or network manager. In this research, the
network is small-scale and non-moving so it is
suitable to use a static routing protocol and manual
configuration is used to change the path if the sending
node is being turned off by the bridge supervisor or
the sending node is in maintenance.
2 SOLUTION METHOD
This section will explain the system design, system
flow diagram and system architecture.
2.1 System Design
Figure 1: System Overview.
Figure 2.1 describes the system designed for
monitoring data sent from each node installed linearly
as shown in Figure 2.1. The communication uses
radio signals that use Nrf24l01 as the module.
Then the data that has been collected according to
the predetermined path according to Figure 2.1, the
data is forwarded to the server. Once received, the
data continues to the website for monitoring in real
time which can be accessed via laptop or gadget by
the user. Monitoring that can be done includes:
critical condition alarms, real-time sensor readings,
and node alarms that are being turned off by bridge
supervisors or in maintenance.
2.2 System Flowchart
Figure 2: Flowchart of Control System.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
562
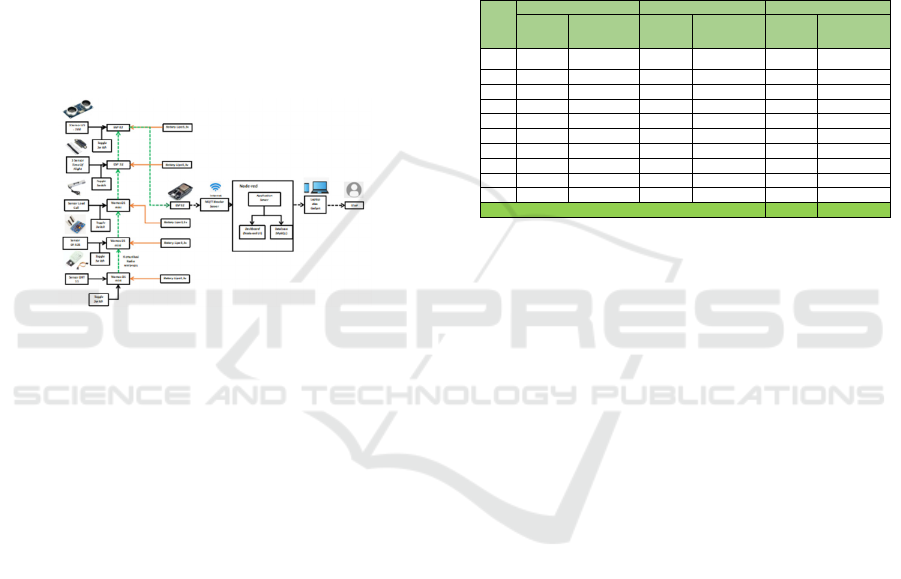
Figure 2 describes the flow chart of the
microcontroller used to process data from each sensor
collected on the server for monitoring on the
dashboard and database. The first stage is turning on
the power for each sensor node. The next stage is to
check the switch on each sensor node whether it is on
or not, if it is on then the next sensor will
automatically activate and continue the existing data
before the node whose switch is active, otherwise the
node will continue according to the flow chart in
Figure 2.2. Finally, the server that has collected the
data checks the connection to Node-Red, if
connected, the data will be displayed on the
dashboard and database using MySQL.
2.3 System Architecture
Figure 3: System Architecture.
The figure 3 explains the system architecture starting
from the contents of each node to the sensor reading
on the website by the user. The SHMS monitoring
control system uses 5 types of sensors, namely: 3 axis
time of flight sensors and 3 axis ultrasonic for
displacement detection (position movement), GY-
521 sensors for tilt and vibration detection, DHT 11
sensors to detect temperature, and load cells to detect
weight on the bridge. The data will be processed by
the WemosD1 mini microcontroller and ESP32
which gets power from a battery. Furthermore, the
data will be sent with a linear topology and state
routing protocol using a toggle switch. For sending to
the server using Nrf24l01 radio signal.
Then, the data will be received by ESP32 as a
microcontroller on the server. Through the internet
line, the data will proceed to the MQTT Broker
Server and then enter the Node-red which aims to
monitor the system on the dashboard and database,
then the data that has been stored is forwarded to a
website that can be accessed by a gadget or laptop
online. Finally, users can monitor data from sensors
via a laptop or gadget to the website, where what can
be accessed is an alarm when the sensor reading
exceeds the predetermined upper and lower limits and
real-time sensor data readings to see the state of the
bridge in real time. There is also a user who gets
access to be an admin, who can excessively change
the upper and lower limits for each sensor.
3 EXPERIMENTAL RESULTS
AND DISCUSSION
3.1 DHT 11 Sensor Test
Table 1: DHT11 Sensor Test.
No
DHT11 HTC-01 Error( %)
Temp
(C
o
)
Humidity
(%)
Temp
(C
o
)
Humidity
(%) Temp
Humidity
1
24,7 81 24,3 83 1,65 2,41
2
25,7 73 25,1 75 2,39 5,67
3 9,1 61 9,2 63 1,09 3,17
4 24,4 87 23,2 92 5,17 5,43
5 29,4 50 30 43 2 16,28
6 25 74 24,1 80 3,73 7,5
7 25,3 76 24,2 79 4,55 3,8
8 24,9 73 24,5 78 1,63 6,41
9 24,6 75 24,6 78 0 3,85
10 24,4 74 24,6 77 0,81 3,9
Average Error 2.3 2.27
In this test, it is carried out to determine the
uncertainty value of a device that will be used. The
value obtained from this test is the error value of the
DHT 11 sensor reading compared to the HTC-01
value as a benchmark.
The value obtained during this 10-time test is done
by comparing the DHT 11 value through the same
ambient and room temperature. There is an average
error value of 2.3% for temperature and 2.27% for
humidity error.
3.2 GY-521 Sensor Tilt Test
This test was conducted to determine the error value
of the GY-521 sensor for pitch and roll tilt readings.
The error value is obtained from the GY-521 sensor
reading compared to the protractor as a measuring
instrument.
Testing is done by entering 9 parameter values for
the angle, where each angle will be tested 3 times to
get the pitch and roll error values.
The values obtained are an average error of 4.07%
for the pitch angle and 6.96% for the roll angle error.
3.3 GY-521 Sensor Frequency Test
This test was conducted to determine the error value
of the GY-521 sensor for frequency readings. The
error value is obtained from the GY-521 sensor
reading which is compared with a gadget application
called Vibrations as a measuring tool.
Design System of Structural Health Monitoring System Using Wireless Sensor Network
563
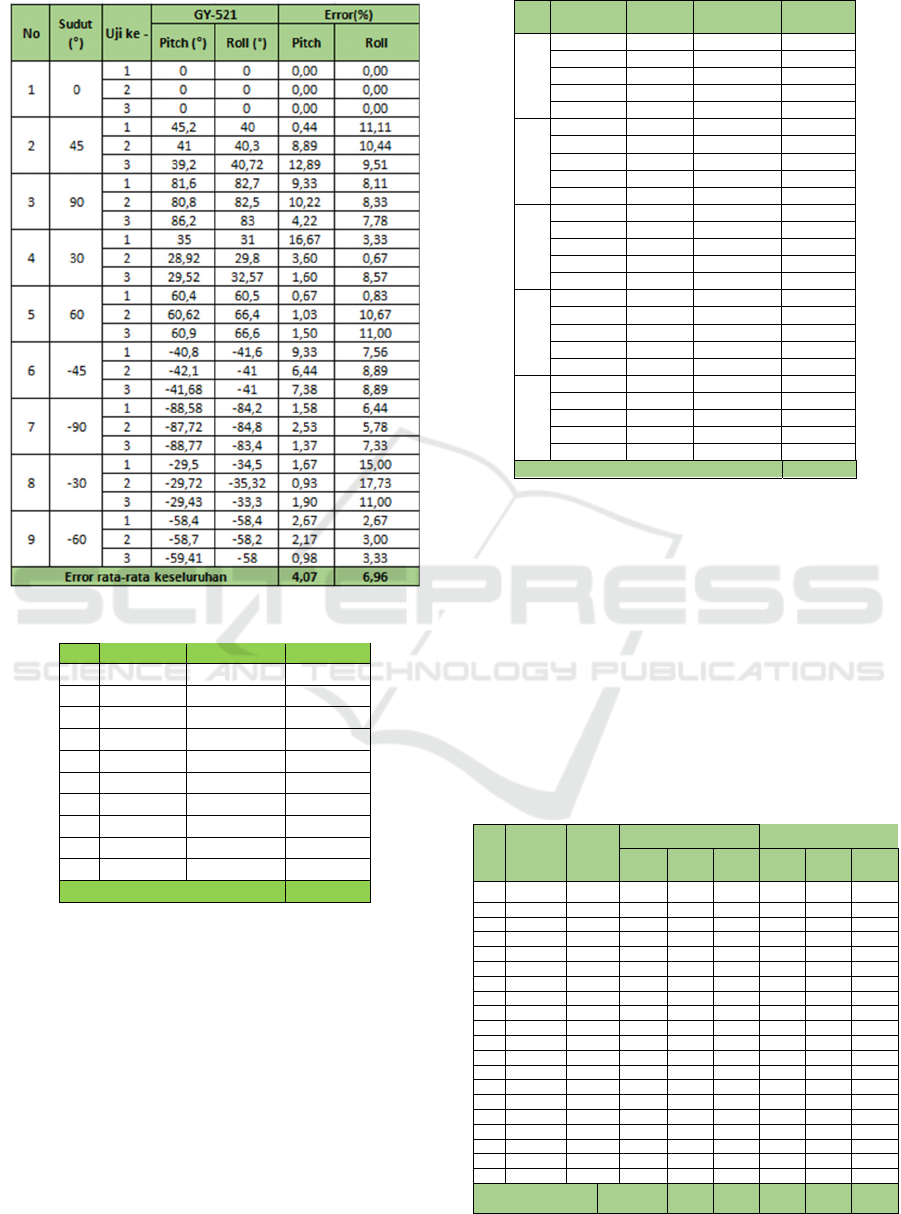
Table 2: Test of GY-521 Sensor tilt measurement.
Table 3: Test of GY-521 Sensor Frequency measurement.
No
Freq (Hz) GY-521(Hz) Error (%)
1 7 7,43 6,14
2 5,04 5,16 2,38
3 4,42 4,92 11,31
4 5,11 5,58 9,2
5 4,3 4,37 1,63
6 6 6,98 16,33
7 5,32 5,38 1,13
8 6,2 6,52 5,16
9 1,7 1,58 7,06
10 5,9 5,98 1,36
Avera
g
e Error 6,17
The test was carried out by entering 10 times the
input obtained was an average error of 6.17% for the
GY-521 sensor frequency.
3.4 Load Cell Sensor Test
In this test, it was carried out to determine the error
value of the Load Cell sensor for weight reading. The
error value is obtained from the GY-521 sensor
reading which is compared to the scale as the
measuring instrument.
Table 4: Test of Load Cell Sensor weight measurement.
No
Weight
(gram)
Test No.
Load Cell
Sensor
Error (%)
1
11,4 1 11,46 0,53%
2 11,48 0,70%
3 11,46 0,53%
4 11,43 0,26%
5 11,44 0,35%
2
23,7 1 23,58 0,51%
2 23,56 0,59%
3 23,51 0,80%
4 23,63 0,30%
5 23,59 0,46%
3
8,5 1 8,5 0,00%
2 8,45 0,59%
3 8,51 0,12%
4 8,5 0,00%
5 8,52 0,24%
4
18,1 1 18,22 0,66%
2 18,2 0,55%
3 18,26 0,88%
4 18,2 0,55%
5 18,26 0,88%
5
10,9 1 10,77 1,19%
2 10,81 0,83%
3 10,78 1,10%
4 10,79 1,01%
5 10,8 0,92%
Avera
g
e Error 0,58%
The test is conducted by entering 5 values for
weight in grams, where each angle will be tested 5
times to get the weight error value.
The value obtained is an average error of 0.58%
for the Load Cell sensor.
3.5 TOF and US-100 Sensor Testing
This test was conducted to determine the error value
of the readings of the 3 TOF and US-100 sensors
compared to the ruler as a test tool.
Table 5: TOF Sensor Testing and US-100 distance
measurement.
No
Distance
(mm)
Test
No.
TOF Sensor US-100 Sensor
X-Axis
Y-
Axis
Z-
Axis
X-
Axis
Y-
Axis
Z-
Axis
1 100 1 96 101 100 100 94 96
2 95 98 97 102 96 100
2 200 1 205 205 198 201 200 199
2 201 200 204 200 204 201
3 300 1 295 303 304 299 301 300
2 301 304 299 303 296 297
4 400 1 402 400 403 403 393 400
2 401 397 400 405 403 400
5 500 1 500 502 497 495 500 502
2 502 499 502 503 501 496
6 600 1 601 599 604 603 602 598
2 599 597 601 602 600 595
7 700 1 700 706 710 712 699 698
2 704 703 708 704 702 706
8 800 1 803 801 796 803 803 817
2 805 798 804 805 799 800
9 900 1 904 898 903 905 904 910
2 894 903 898 902 901 896
10 1000 1 1010 1020 1005 1014 1004 1008
2 1005 1007 1012 1009 1006 1001
Average Error 0,98% 0,74% 0,80% 0,73% 0,96% 0,73%
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
564
Tests were carried out by entering 10 values for the
distance in mm, where each distance will be tested
twice to get the distance error value for 3 TOF sensors
x, y, z axis and 3 US-100 sensors x, y, z axis.
The values obtained are the average error for
TOF x, y, and z axes which are 0.98%, 0.74%, and
0.8%. As for the US-100 x, y, and z axes, the reading
errors are 0.73%, 0.96%, and 0.73%.
3.6 Latency Testing of Data Reading
for Each Node on the Website
Testing is done to get the latency or delay reading
value for each node that is read in the Node-red
dashboard. The reading is done using a stopwatch
available on the gadget, where the stopwatch is turned
on when the data is read until the next data is read.
Table 6: Latency Testing of Data Reading for Each Node
on the Website.
No
Test
No.
Delay (second)
Node
DHT-11
Node
GY-521
Node Load
Cell
Node
TOF
Node
US-100
1 1 2,16 0,63 3,6 0,59 8,98
2 2 10,28 4,43 5,38 0,98 4,93
3 3 1,67 0,88 2,25 0,69 3,26
4 4 1,32 0,39 8,17 3,27 6,74
5 5 5,41 4 4,01 0,44 6,43
6 6 2,43 0,5 1,94 3,32 8,68
7 7 2,88 3,93 3,91 2,91 21,02
8 8 9,88 1,01 6,75 5,02 3,43
9 9 5,1 2,15 7,9 2,91 4,37
10 10 2,41 2,21 2,87 0,95 8,92
Average
Error
4,35 2,01 4,68 2,11 7,68
Testing was carried out 10 times and there were 5
nodes, namely DHT 11, GY-521, Load Cell, TOF,
and US-100 nodes where the average latency in order
was 4.35%, 1.96%, 4.68%, 2.11%, and 7.68%.
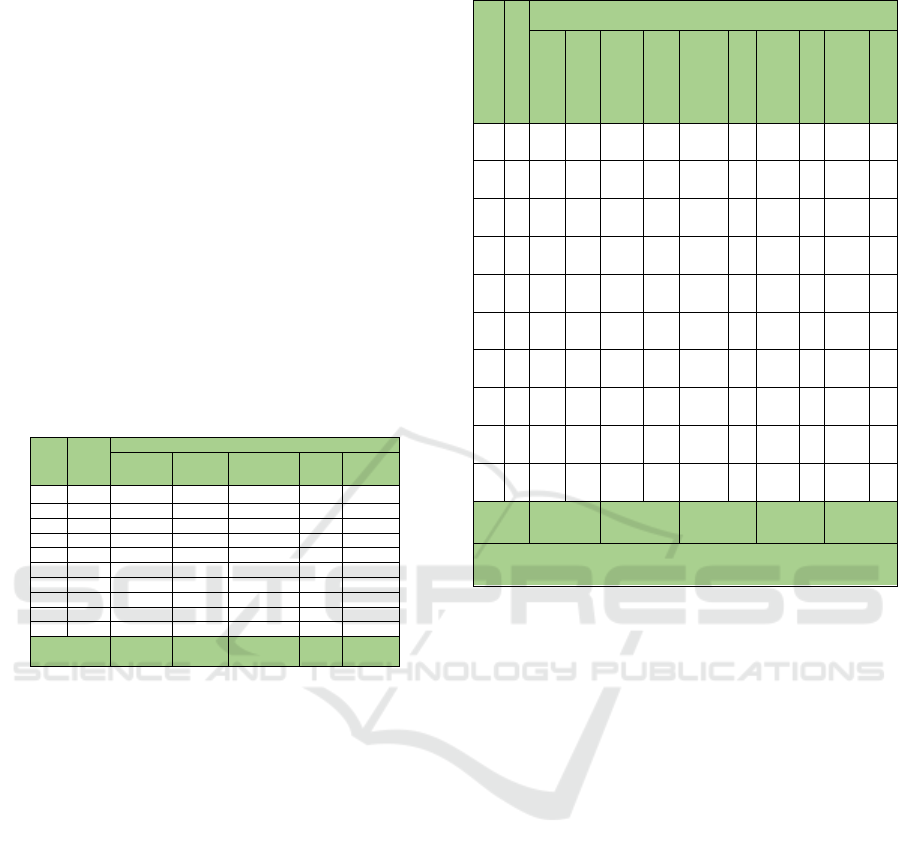
3.7 Latency Testing of Switch Alarm
Reading for Each Node on the
Website
Testing is done to get the latency value or reading
delay for the switch alarm for each node that reads the
alarm on the Node-red dashboard which indicates the
switch is doing its job properly. The reading is done
using a stopwatch available on the gadget, where the
stopwatch is turned on when the switch is turned on
until the alarm is read.
Testing was carried out 10 times and the nodes
that used the switch were 5 nodes, namely the DHT
11, GY-521, Load Cell, TOF, and US-100 nodes
where the average latency readings in order were
8.4%, 17.645%, 9.847%, 11.06%, and 16.244%.
Table 7: Latency Data & Transmission.
No
Te
st
N
o.
Delay (second)
Nod
e
DH
T-
11
Des
c
Nod
e
GY-
521
Des
c
Node
Load
Cell
De
scr
ipt
io
n
Nod
e
TOF
D
es
cri
pti
on
Node
US-
100
De
scr
ipt
io
n
1 1
6,6
4
S
23,9
9
S 24,89 S
12,5
5
S 3,94 S
2 2
6,5
6
S
29,8
4
S 15,38 S
36,9
2
S 6,98 S
3 3
12,
23
S
11,0
8
S 1,35 S
23,0
5
S
27,4
5
S
4 4
9,1
6
S
23,2
2
S 3,74 S 2,78 S 6,65 S
5 5
5,0
7
S 5,5 S 31,76 S 4,28 S 2,79 S
6 6 4,5 S 17,2 S 2,44 S 9,09 S
31,4
8
S
7 7
15,
91
S
35,7
2
S 5,07 S 4,71 S
12,1
4
S
8 8
5,9
9
S
13,8
3
S 6,77 S 6,32 S
50,1
8
S
9 9
12,
63
S 6,8 S 3,6 S 6,93 S
14,8
1
S
10
1
0
5,3
1
S 9,27 S 3,47 S 3,97 S 6,02 S
Avera
ge
8,40 17,65 9,85 11,06 16,24
S = Succesfull
US = Unsuccesfull
4 CONCLUSIONS
Based on the results of the design and testing of the
monitoring system for bridge health, it has
successfully performed its main function, namely
reading sensor data from each node for monitoring
and reading the switch alarm which is a static routing
protocol system that is used if the node is turned off
due to problems or maintenance, then there is also
history data on the dashboard of each node which is
intended for bridge supervisors and bridge engineers
to view past data. Where when testing the error from
the DHT 11 sensor is below 2.3%. Then for the GY-
521 error which is below 7%. Furthermore, the Load
Cell sensor has an error of 0.58%. And the last sensor
test is the distance on TOF and US-100 where the
overall error is below 1%.
For data reading latency at each node on the
website at nodes DHT 11, GY-521, Load Cell, TOF,
and US-100 where the average latency in order is
4.35%, 1.96%, 4.68%, 2.11%, and 7.68% then the
latency of the switch alarm reading data is node DHT
11, GY-521, Load Cell, TOF, and US-100 where the
average latency readings in order are 8.4%, 17.645%,
9.847%, 11.06%, and 16.24% where latency data
Design System of Structural Health Monitoring System Using Wireless Sensor Network
565

varies due to data transmission errors from nodes and
internet network instability for the website.
REFERENCES
N. Amalina, E. Setijadi, and Suwadi. (2016). “Desain
Topologi Komunikasi Wireless Sensor Network (Wsn)
Pada Aplikasi Sistem Structural Health Monitoring
(Shm) Jembatan,” Jurnal Ilmu Komputer dan DKV,
vol. 1, no. 1, pp. 1–13.
M. Z. Arifin. (2014). ”Implementasi Protokol Ad-Hoc Pada
Wsn Module Untuk Shms Pada Jembatan Bentang
Panjang ,” Tugas Akhir, Institut Teknologi Sepuluh
Nopember.
J. Hartono and U. Khoiroh. (2001). “Evaluasi Rencana
Pemasangan Sensor Structure Health Monitoring
System Jembatan Pulau Balang Ii,” Teras Jurnal, vol.
11, no. 2, pp. 1–14.
P. Cahya. (2016). ”Implementasi Dan Pengujian Sistem
Monitoring Kesehatan Struktur Pada Jembatan
Surabaya-Madura,” Tugas Akhir, Institut Teknologi
Sepuluh Nopember.
I. W. Sutaya, K. U. Ariawan, and D. G. H. Divayana.
(2019). “Implementasi Jaringan WSN Mesh Berbasis
Radio Wireless nRF24l01 Pada Sistem Meteran Air
Rumah Kos,” Jurnal EECCIS, vol. 13, no. 1, pp. 1–6.
R. K. Domga, R. Stanica, M. Tchuente, and F. Valois.
(2019). “Sensor deployment in wireless sensor
networks with linear topology using virtual node
concept,” Wireless Networks, vol. 25, no. 8, pp. 4947–
4962.
S. C. Abadi, A. Prafanto, M. Eriyadi, A. Suryadi, and G. D.
Ramadi. (2020). “PENERAPAN PROTOKOL
PUBLISH / SUBSCRIBE MESSAGING SYSTEM
PADA SISTEM WIRELESS BUILDING NETWORK
BERBASIS NRF24L01,” JTT (Jurnal Teknologi
Terapan), vol. 6, no. 2, p. 172.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
566
