
Barong Is Bluetooth on Arduino Controlling Robotic Hand to Install
Insulation Cover in Live Line
I Gede Suputra Widharma
1a
, I Wayan Jondra
3b
, I Gede Nyoman Suta Waisnawa
2
,
Ida Bagus Putu Yogi Pramana Putra
1
and I Made Wiryana
1
1
Automation Engineering Program, Electrical Engineering, Bali State Polytechnic, Badung Bali, Indonesia
2
Machine Engineering Program, Machine Engineering, Bali State Polytechnic, Badung Bali, Indonesia
3
Electrical Engineering Program, Electrical Engineering, Bali State Polytechnic, Badung Bali, Indonesia
Keywords: Bluetooth, Arduino, Robotic Hand, Control System, Insulation Cover.
Abstract: The cessation of electricity distribution can cause complaints from consumers. Maintenance of the electricity
network is important to improve service to consumers. This research was motivated by the existence of
problems in the installation of the insulator cover. This is a direct touch job, necessary to turn off the power
because it can be dangerous for workers to touch the live line. The goal is to design a wireless-based robotic
hand controller for the installation of the insulator cover so that workers have a safe distance and without
touching live line during installation. This robot control system uses an application designed with the drag-
drop block programming method on app inventor. This application is installed on smartphone, then connected
to Bluetooth on the Esp32 which has been programmed with the H-Bride logic gate to control the direction
of motor rotation. Controlling the motor direction on the robot's hand can be done with a voltage of 12 Volts.
The output of this design can control the robot's hand to install the insulator cover with the remote work
method using a stick on a live power pole. This is expected to help improve the reliability of the distribution
of electrical energy supply.
1 INTRODUCTION
1.1 System Security: Electrical Power
Distribution Challenge
The more developed industrialization and modern
buildings, the greater the level of dependence on
electrical energy. The cessation of electricity
distribution even for a moment can cause complaints
from consumers. Therefore, maintenance of the
electricity network is important, in order to improve
service to consumers. This research was motivated by
the existence of problems in the installation of the
insulator cover to avoid external threats, especially
the weather. In this era, technology is growing. Many
human jobs that are done manually and require a lot
of energy have been replaced by machines. The
machine used can work automatically, or semi-
automatically by simply pressing a button, so you
a
https://orcid.org/0000-0002-7090-545X
b
https://orcid.org/0000-0001-6800-6415
don't need to exert a lot of energy. This of course
aims to streamline human labor and time to complete
work, especially public works which have limited
time to complete. One of the jobs in question is the
installation of an insulator cover on an electrical
substation with a voltage of 20 kV. Electricity is a
very important component of human activity
(Richard, 2015). Global electricity consumption has
continued to go up faster than energy consumption
(Zhenya, 2016). In this globalization era, electrical
energy has become a primary need in the world.
Electricity consumption occupied by residential to
reach its highest point in China. (Zhaoguang, 2014)
This installation is carried out to protect the wiring
of substations or electricity poles from disturbances
caused by external factors such as trees, animals or
the weather. Especially in the part of the network
construction that is still open, it needs to be protected
to avoid external disturbances. This can be a concern
because this open part may be passed by animals such
764
Widharma, I., Jondra, I., Waisnawa, I., Putra, I. and Wiryana, I.
Barong Is Bluetooth on Arduino Controlling Robotic Hand to Install Insulation Cover in Live Line.
DOI: 10.5220/0011879600003575
In Proceedings of the 5th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2022), pages 764-769
ISBN: 978-989-758-619-4; ISSN: 2975-8246
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

as squirrels, resulting in a short circuit that causes the
relay to work and forcibly turn off the electricity. This
of course will cause the distribution of electrical
energy to be hampered to consumers. So, the
installation of this insulator cover is very important in
maintaining the distribution of electrical energy.
Installing this insulator cover is a direct touch job.
This means that type of work is carried out in a non-
voltage condition. However, if there is a blackout, it
will certainly cause complaints from consumers
because community activities that require electricity
will be hampered. The world economy movement is
strongly influenced by the availability of electrical
energy. There will be several problems in human life
without electrical energy. The electrical energy
supply system consists of several parts, such as power
plants, substations, transmission, distribution, and
distribution substations. These parts should be
reliable in handling problems in the electrical system.
This reliable system is designed to guarantee
continuously standard electrical energy availability.
Security is very important in electrical energy
distribution. The green electrical energy distribution
system securely to the humans, environment, animals,
and plants. There were many electrical blackouts
caused by animal and tree disorders. This will disrupt
the green electrical energy distribution because
animals die after electrical discharge (Melo, 2014).
In this paper, some problems such as the insulator
cover type YSL-70AP insulation resistance,
breakdown voltage of the insulator cover type YSL-
70AP, and the preferable of the insulator cover type
YSL-70AP applied in the 20 kV system, were
investigated. With the use of a wireless control
system, the insulator cover can be installed without
turning off the electricity and without touching the
power cord directly (Jondra, 2019). With the use of a
wireless control system, the insulator cover can be
installed without turning off the electricity and
without touching the power cord directly. Because,
with a wireless control system, workers have a safe
distance in the installation of the insulator cover and
do not touch live power cables directly. This makes
this tool an advantage in optimizing work time which
can be done at any time without the need for a rotating
blackout schedule. Problems in the field need to be
observed for the purpose of obtaining a solution in
solving an existing problem (Turan, 1986).
2 CONTROL SYSTEM FOR THE
SOLUTION
This study uses 2 methodologies namely observation
and experiment. To get the best solution, it is
necessary to carry out various experiments on the
object under investigation the first step taken is to
review the research design and the components
needed. To design a tool, it is necessary to study the
literature so that the tool works in accordance with the
expected goals (IEC, 2209).
2.1 Microcontroller
The function of the microcontroller is as the brain or
controller of an electronic circuit for a specific
purpose. ESP32 is a microcontroller introduced by
the Espressif System which is the successor of the
ESP8266 microcontroller (Sanjay, 2018).
One difference between the ESP32 and the
ESP8266 is the processor. ESP32 is Dual-Core 32-bit
obviously faster than ESP32 in performance. In
addition, this module also has one feature that is not
present in the ESP8266, namely Bluetooth which can
receive data up to 25 meters away without a hitch.
2.2 Power Window Motor
The power window motor is a type of DC motor with
a gearbox that usually functions as a driving force for
the ups and downs of the windshield. This DC motor
requires a voltage of 12 Volt DC (Salman, 2011).
We use this type of motorbike because it is easily
available in the market and in terms of function, this
motorbike has enough torque to see by moving the
windshield. So that this motor is expected to be able
to move the robot's hand insulator cover.
2.3 Motor Driver
The L298 Motor Driver is a module that is often used
to control DC motors. By using the L298 Motor
Driver we can easily control both the speed and
direction of rotation of 2 motors at once. The L298
Motor Driver is designed using the L298 Dual H-
Bridge IC. The Motor Driver contains H-Bride logic
gates which are already very popular in the
electronics world as controlling the speed and
direction of motor rotation [5]. It should be noted that
we use this motor driver because the Drive Current in
this driver is able to supply up to 5A per channel,
which is where the motor we use has been tested for
load and the measurement results are less than 5A. So
Barong Is Bluetooth on Arduino Controlling Robotic Hand to Install Insulation Cover in Live Line
765
this motor driver is able to control the DC motor we
use (Peerzada, 2021).
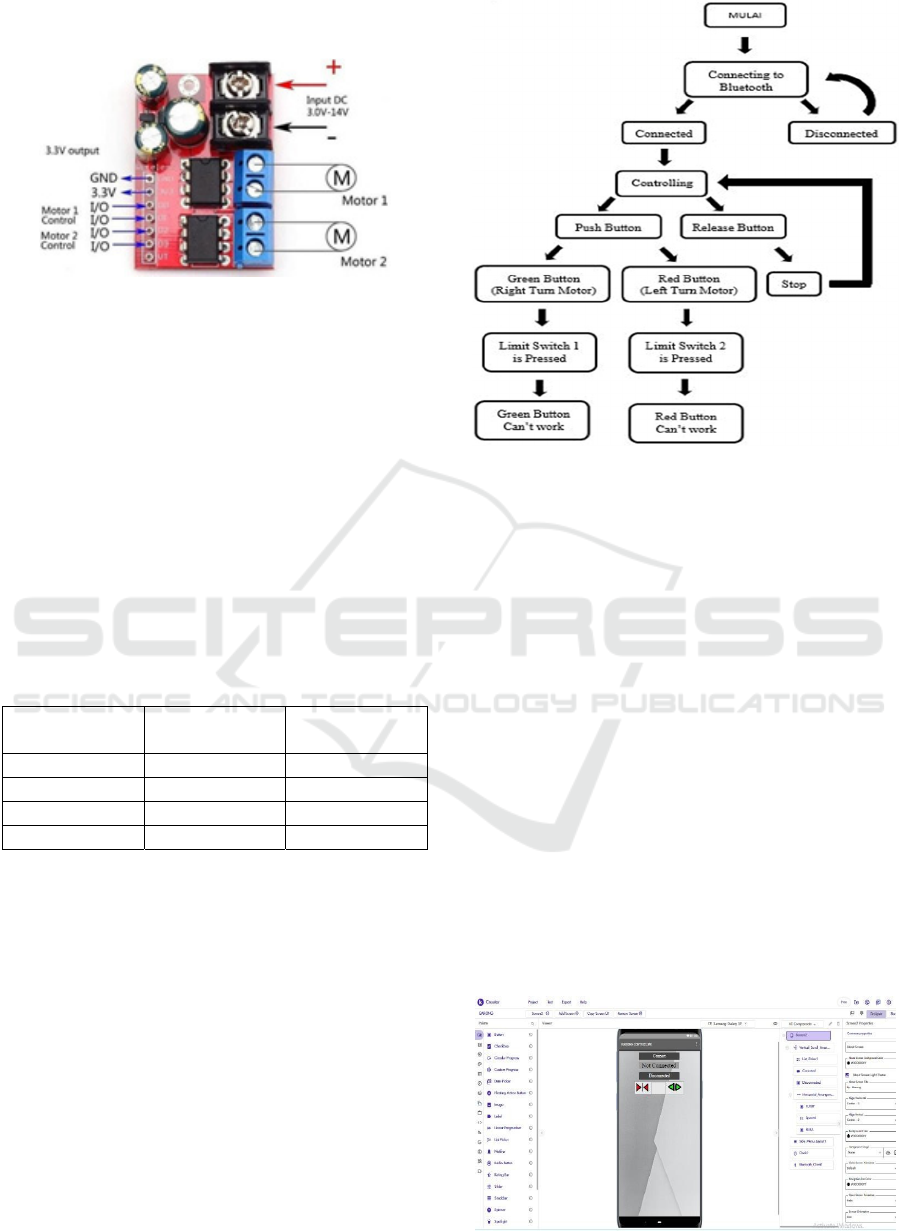
Figure 1: Motor driver L298.
2.4 How to Design of Barong System
The design of this system focuses on the wireless
control system. The first thing that is needed here is
hardware and software to support the wireless control
system. One of the hardware needed is the Esp32
microcontroller. The Esp32 used has been planted
with wifi and Bluetooth features. We use the
Bluetooth feature to make it easier to use. The
software needed is Arduino IDE. Arduino IDE is
software used to program Esp32 microcontroller
boards. Esp32 is the most important hardware part of
this control system. As a controller, Esp32 plays a
role in sending signals to the motor driver.
Table 1: Logics of H-Bridge.
I/O 1 I/O 2
Motor
Condition
Hi
g
h Hi
g
h Off
Low Low Off
Hi
g
h Low Clockwise
Low Hi
g
h Unclockwise
The motor driver that we use is the L298 type, the
DC voltage range is 3-14V as shown below. The
above logic table is our basis for programming the
control system on Esp32. The output pin of the Esp32
will provide a signal that will enter the IN pin of the
motor driver. The rotation of the motor will depend
on the signal given based on the above logic table.
The reason we use this motor driver is that we will
design this system with a power window motor or a
motor that is usually used as a windshield driver on a
car in order to get enough torque to move the robot's
hand. The voltage required to supply this motor is
12V DC. We also designed a power supply with 3
rechargeable batteries to allow charging the battery if
the battery is running low. We have 3 series of 3,7V
batteries in series controlled by the Battery
Management System (BMS) in order to stabilize the
Figure 2: The design of Barong system.
output voltage and maintain battery health, especially
by preventing overcharge and over-discharge.
2.5 Designing the Application for the
Smartphone
The robot hand control is fully controlled by
application users or workers in the field to adjust the
installation conditions of the insulator cover. To
summarize this wireless-based control, an application
is designed as a medium for sending data to the
controller. Kodular is the platform used in building
this Android application. Kodular uses a drag drop
block programming system in building an application
(Knowles, 2013). The drag-drop block programming
system is a programming system that uses function
blocks as the logic for running an application. Even
in designing this system, this system is based on
visual programming, which means programming the
design without writing. The following codular
designs have been made:
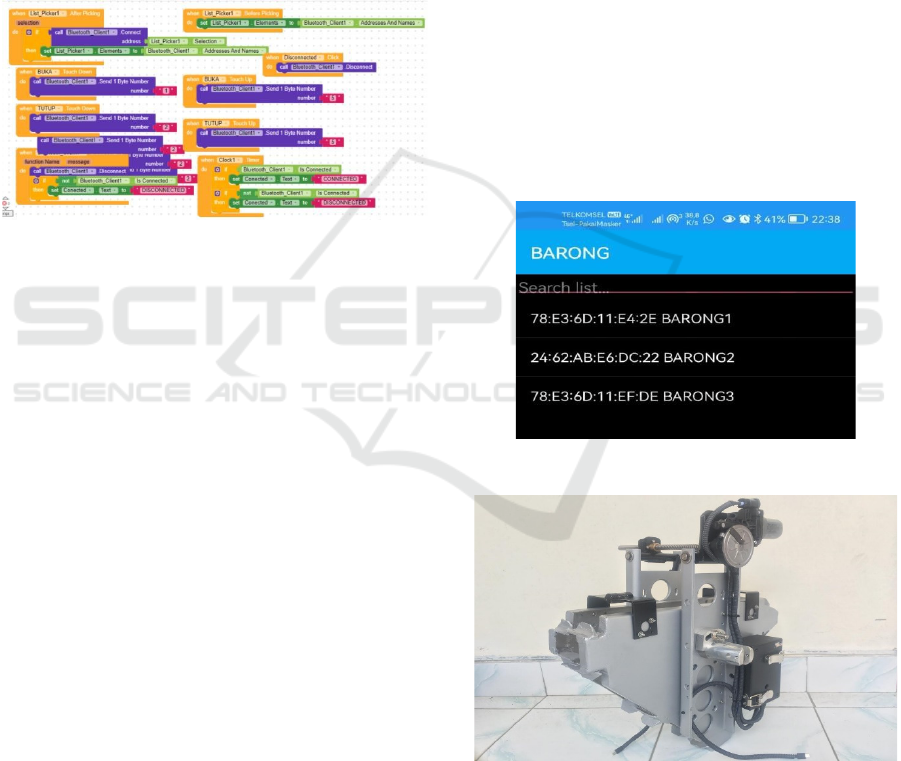
Figure 3: Design of visual programming for smartphone.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
766
Control data or commands should be sent via
Bluetooth on the Android device application to the
controller. Therefore, Esp32 on the controller needs
to authenticate the Bluetooth connection of nearby
users to be able to connect to each other to send data
to the controller. (Purnata, 2022). To realize this,
Arduino IDE software is needed to program this
control work system in an Esp32 microcontroller.
This program will of course be integrated with the
program block in the coded. Every data sent from the
application will send a 1 byte number. Where this
number will arrive at the Esp32 microcontroller, then
executed according to the logic that has been made.
Figure 4: Application design of block programming to
control robotic’s hand by bluetooth.
First, it requires a library program or commonly
called a library to summarize the program created.
Defining the variables is also needed in engineering
the work system later. In the void setup, categorize
the output and input pins to be input data or output
data. In void setup also initiates a Bluetooth
connection, so that it is only enough to connect the
android device with the controller once. In the void
loop, logic is given to receive any data from coded.
Receipt of data in the form of a byte number that has
been adjusted to the coded program block. The
delivery of each data is determined from the button
control in the application. If the green button is
pressed then byte number 1 will be sent. If the red
button is pressed, then byte number 2 is sent. If both
buttons are not pressed then byte number 5 will be
sent.
The byte number data sent will be received by
Esp32. If the byte number is 1 then the sublogic that
is executed is void forward or the motor command
will move forward. If the byte number is 2, then the
sublogic that is executed is void backward or the
motor command will move the other way around
(backward). If the byte number is 5, then the motor
will stop spinning. So these systems are integrated
with each other, so that the designed control system
can run as expected.
3 EXPERIMENT TESTED
RESULT AND DISCUSSION
In this study, the experiments tested were divided into
several test subsystems. Each of these subsystems has
an indicator of the success of a designed tool. The first
subsystem tests the success of the Bluetooth
connection between the Android device and the
device. Second, the success of controlling the motor
on the robot's hand through the designed application.
Third, the success of closing or installing the insulator
cover in the field. The information obtained on this
tool is in order to obtain its specifications, such as the
maximum operating distance between the android
device and the designed tool and battery resistance in
carrying out work when installing the insulator cover.
3.1 Testing the Bluetooth Connection
We named each device three samples is
“BARONG1”, “BARONG2” and “BARONG3”.
Figure 5: Bluetooth connectivity detection results.
Figure 6: Barong ready to install insulator cover in the live
line.
The test of the three tools that have been designed
has been successfully detected by the application so
that it can be connected to the Android device. The
maximum operating distance measurement between
Barong Is Bluetooth on Arduino Controlling Robotic Hand to Install Insulation Cover in Live Line
767

the designed tool and the Android device without
obstruction is up to 24 Meters. Above 24 meters the
Bluetooth connection becomes less stable which
causes the connection to be disconnected suddenly.
Table 2: Bluetooth connectivity range measurement results.
No. Distance (m) Connectivity Status
1 4 Connected Stable
2 8 Connected Stable
3 12 Connected Stable
4 16 Connected Stable
5 20 Connected Stable
6 24 Connected Stable
7 28 Connected Unstable
8 32 Not Connected
3.2 Testing the App Control Success
and Battery Lifetime
Motor control uses an app with 2 button that can
rotate the direction of rotation of the motor. The
direction of rotation of this motor will determine the
position of the robot's hand to close or open. Red
button to close and green button to open. From the
experimental results that have been tried, the control
was successfully carried out to open and close the
robot's hand. Battery life in the installation is quite
good. When the battery is fully discharged, this tool
can perform more than 10 times of installation.
Charging the battery takes 2.5 hours.
Figure 7: Performance of Barong with its bluetooth
connectivity results.
There are three results and analyses of this
research, i.e. digitalization process, laboratory web
design process and upload digitalization result to the
web process.
3.3 Final: Testing of Insulator Cover
Installation in the Live Line
The insulator cover installation is tested to determine
the reliability of its installation. The installation
simulation was carried out several times to determine
whether the insulator cover could be installed
properly or not. Ensure that the insulator cover is
securely attached and locks the clamps on the
insulator cover.
Figure 8: Barong install the Insulator Cover on Live Line in
Udiklat PLN Semarang Center Java.
From the situation experiment, there are obstacles
in limiting excessive control when pressing the button
for too long when the condition of the robotic hand
has opened or closed the maximum. This can cause
the motor to overheat due to excessive performance
and cause the tool or insulator cap to be damaged due
to pressure on the construction. Based on the results
of this description are many suggestions as described:
PLN must utilize Insulator cover type: YSL-70 AP
optimally because the results of this study indicate the
performance is over than standardization. This
insulator cover can protect again tree and animal
disturbance. Tree disturbance is the problem of
equipment outage. If it is deemed to increase the
isolation resistance of this insulator cover it needs
some modification, to improve the safety to install an
insulator cover. The installation of the insulator cover
by utilizing this Barong robotic hand will keep the
line still live and workers safe from possibility of
being exposed to high voltage electricity.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
768

4 CONCLUSIONS – POTENTIAL
AND PROSPECTS FOR THE
INSTALLATION IN THE LIVE
LINE SAFELY
The design system for the robotic hand control that
installs the insulator cover has been realized and
tested. From the experimental results obtained some
information that needs to be considered.
First, this robotic hand can operate effectively
with a range of up to 24 meters from the smartphone
device used.
Second, the installation of the insulator cover is
carried out perfectly without any locking clamps that
have not been locked. So, the installation of this
insulator cover can be said to be successful.
Third, the battery life is capable of installing up to
more than 10 times of installation. So enough to
support the work of the day. On the other hand, this
tool needs to be improved, especially in limiting
excessive control when pressing the button for too
long when the robot's hand condition has opened or
closed to the maximum.
As a suggestion, additional components such as a
limit switch as a barrier to motor movement in order
to prevent overheating of the motor due to excessive
performance and prevent the tool or insulator cover
from being damaged due to pressure on the
construction.
ACKNOWLEDGEMENTS
This research was funded by BRIN. We thank to
BRIN, The Centre of Education and Training of PLN
Semarang, Student Tasks Channel, Electrical and
Machine Engineering Department, and the Centre for
Research and Community Service (P3M PNB) for
providing the kind support.
REFERENCES
Richard F, Jonathan H and Koomey G (2015). The
Electricity Journal 28 72-84
Zhenya L (2016). Global Energy Interconnection
(Cambridge: Elsevier)
Zhaoguang Hu, Xiandong Tan and Zhaoyuan Xu. (2014).
A Review of china’s economic development and
electricity consumption, An Exploration into China's
Economic Development and Electricity Demand by the
Year 2050. Cambridge: Elsevier Inc.
Jondra, IW, Widharma, IGS, I N Sunaya, (2019). Insulation
resistance and breakdown voltage analysis for insulator
cover type YSL-70AP. Journal of Physics: Conference
Series
Sanjay G, Kaustubh D and Priyanka M., (2018). Journal of
Engineering and Technology (IRJET) 05
Salman, A and Muhammad, A. (2011). Semantic Scholar,
15
Melo A, M Martinez and De Queiroz A A., (2014). Journal
of Materials Engineering and Performance
Purnata, H., Ramadan, S., Hidayat, M. A., & Maulana, I.
(2022). PID Control Schematic Design for Omni-
directional Wheel Mobile Robot Cilacap State of
Polytechnic. 12(2), 89–94.
Peerzada, P., Larika, W. H., & Mahar, A. A. (2021). DC
Motor Speed Control Through Arduino andL298N
Motor Driver Using PID Controller. International
Journal of Electrical Engineering & Emerging
Technology, 04(2), 21–24.
Knowles, M. (2013). Through-life management of electric
vehicles. International through-life engineering
services conference, Procedia CIRP 11 (2013) 260 –
265 2nd.
Suputra Widharma, IG, Sunaya, IN, Arka, IGP, and
Sajayasa, IM. (2017). Effect of Using Ground Wire to
Lightning Surge Interference at 20 KV Medium
Voltage Distribution System Based on Genetics
Algorithm. International Research Journal of
Engineering, IT & Scientific Research (IRJEIS), 3 (3),
65-76.
Turan, G, et all. (1986). Electric Power Distribution System
Engineering (Singapore: McGraw-Hill Book Co.)
IEC 60038 2009 IEC Standard Voltage (Geneva: IEC and
SEK)
Barong Is Bluetooth on Arduino Controlling Robotic Hand to Install Insulation Cover in Live Line
769
