
Toward the Design of Personalised Adaptive Driver Assistance for Truck
Docking
Marc-Andr
´
e B
¨
uchner
1 a
, Pedro Ribeiro
1 b
, Andr
´
e Frank Krause
1 c
, Jan Benders
2
, Christian
Ressel
1
, and Kai Essig
1
1
Rhine-Waal University of Applied Sciences, 47475 Kamp-Lintfort, Germany
2
HAN University of Applied Sciences
{marc-andre.buechner2, pedro.ribeiro, andrefrank.krause, christian.ressel,
Keywords:
Advanced Driver Assistance, Personalization, Adaptive User Interface, Expertise Estimation, Machine
Learning, Support Vector Machine, Truck Docking, Virtual Reality Simulator
Abstract:
Backwards manoeuvring of articulated vehicles towards the loading bay at a distribution centre has been ac-
knowledged as a significant source of accidents. Individualized driver assistance aimed to support professional
truck drivers in this challenging scenario is still very much in its early days. This paper presents the ongo-
ing design and development of a user interface and expertise estimation for adaptive and personalised driver
assistance to support truck drivers through the scenario of parking a semi-trailer truck in a loading bay. The
proposed system aims to adapt in real-time based on the current driving performance and adaptation rules.
1 INTRODUCTION
Performing the manoeuvre of docking a truck combi-
nation towards the loading bay of a distribution cen-
tre can be a very challenging task. This compli-
cated manoeuvre can potentially result in accidents
and costs due to damage caused, for example, by
driving errors or information overload (Kural et al.,
2016; Kusumakar et al., 2017). Generally, the main
causes of truck accidents are related to human fac-
tors, technical failures or environmental conditions
(Union, 2007) - with the first one being the most im-
pactful cause. There is a plethora of aspects that in-
fluence the complexity of this specific task of docking
a truck combination, some are driver related such as
the experience, physical, emotional or perceptual fac-
tors, and others are associated with the environment
and vehicle conditions. In that context, the platform
VISTA-Sim (Ribeiro et al., 2021) was being devel-
oped in the project VISTA (VIsion Supported Truck
docking Assistant).
VISTA-Sim uses a virtual reality (VR) environment
to simulate and investigate driver performance, train
drivers and develop and evaluate different forms
a
https://orcid.org/0000-0003-0530-2975
b
https://orcid.org/0000-0002-9829-8268
c
https://orcid.org/0000-0002-9685-278X
of context-sensitive and personalised driver assis-
tance provided by the In-Vehicle Information System
(IVIS) that is running on a virtual tablet installed in
the truck cabin (see Figure 1). One of the pivotal
advantages of the VR simulator is, that it allows the
tracking of driver and vehicle behaviour data, which
can be interpreted to discover driver problems and to
adapt personalised assistance.
This paper aims to further develop the VISTA-Sim
platform with a particular focus on a mechanism
that will allow the personalised adaptation of driver
assistance. For that, this mechanism shall be ca-
pable of learning from the driver’s behaviours, es-
timating driver performance and deciding upon the
most appropriate driver assistance. The develop-
ment of such a mechanism is a challenge: Humans,
particularly drivers, might be hesitant to follow AI-
generated instructions that are not easily justified, in-
terpretable and ultimately trustworthy (Arrieta et al.,
2020). Therefore, this paper aims to apply the pro-
cess of personalisation in which the driver assistance
is tailored to match the driver’s needs and prefer-
ences (Hasenj
¨
ager et al., 2019). Accordingly, it is
intended to explore a hybrid approach that combines
the potential of machine learning (ML) with back-
ground knowledge in the form of logical statements.
This paper presents the current progress of a person-
alised adaptive user interface for an assistive applica-
BÃijchner, M., Ribeiro, P., Krause, A., Benders, J., Ressel, C. and Essig, K.
Toward the Design of Personalised Adaptive Dr iver Assistance for Truck Docking.
DOI: 10.5220/0011907100003612
In Proceedings of the 3rd Inter national Symposium on Automation, Information and Computing (ISAIC 2022), pages 131-137
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
131

tion that supports drivers performing the backwards
manoeuvring of articulated vehicles. The proposed
mechanism aims to automatically adjust the driver as-
sistance based on a performance estimation module
that uses the VISTA-Sim capacities to track the driv-
ing behaviour. For example, the steering wheel an-
gle, trailer’s position and rotation, driver’s head po-
sition and orientation and eye-tracking data such as
the direction of the gaze ray and fixated objects can
be fed into the performance estimation module. The
performance-dependent assistance is adjusted by ap-
plying ML-based expertise estimation in combination
with a rule-based adaptation mechanism.
2 RELATED WORK
Fan and Poole (Fan and Poole, 2006) defined the per-
sonalisation of digital technologies as “a process that
changes the functionality, interface, information ac-
cess and content, or distinctiveness of a system to in-
crease its personal relevance to an individual or a cate-
gory of individuals”. They also proposed a high-level
framework to classify approaches to personalisation
along three dimensions: (1) what to personalise (e.g.
content and functionality of the driver assistance pro-
vided by the IVIS); (2) to whom to personalise (e.g.
drivers); and (3) the explicitness of the personalisa-
tion or how the personalisation is achieved (Fan and
Poole, 2006). Regarding the third dimension, there
are two possibilities: (1) the implicit personalisation
where the information needed for personalisation is
collected automatically; and (2) the explicit person-
alisation where the driver has direct control over the
parameterization needed for the personalisation.
One of the current trends in the automotive sector
is the exploration of the personalisation of advanced
driver assistance systems (ADAS) and the individ-
ualised adaptation of the driver-vehicle interaction
(Hasenj
¨
ager et al., 2019; Lilis et al., 2017). Prop-
erly adapting the IVIS functionalities according to
the individual characteristics and needs of a driver
requires that the driver remains in the loop (Riener
et al., 2016). Personalisation is seen as an impor-
tant safety aspect as it has the potential to prevent
distractions and cognitive overload, and ultimately re-
duce the risks of accidents (Lilis et al., 2017; Ulahan-
nan et al., 2021). Additionally, according to a recent
study, the personalisation of autonomy increases the
familiarity and willingness to trust Autonomous vehi-
cles (AVs) or self-driving cars (Sun et al., 2020).
As mentioned previously, there are two approaches to
personalise IVIS functionalities: the explicit and the
implicit approach (Fan and Poole, 2006; Stuerzlinger
et al., 2006). Although the explicit approach has the
potential to promote a personalisation that is better
aligned with the driver’s expectation it also has some
disadvantages. First, it requires drivers to direct at-
tention and effort toward the process of personalisa-
tion, which might eventually distract them from the
docking process. This direct control may also result
in a limitation of the number of parameters that can be
subjected to personalisation. Additionally, this limi-
tation can be further aggravated by the “inaccessibil-
ity” of parameters which are difficult to understand
(Hasenj
¨
ager et al., 2019). Finally, the driver may not
be completely aware of what information is neces-
sary to maximise the driving performance. In fact,
even the safety might be compromised by a decision
grounded on preferences that can prevent the presen-
tation of critical information (Ulahannan et al., 2020;
Ulahannan et al., 2021).
With the implicit approach, the information provided
by the driving assistance is automatically presented
or hidden. With this approach, the driver might ex-
perience that the information provided by the IVIS is
not under his/her control and might not even under-
stand the rationale of the driving assistance provided
(Hasenj
¨
ager et al., 2019). However, the implicit ap-
proach has the benefit of reducing the effort, the at-
tention and the cognitive load. Additionally, it has the
potential to offer a more complex, precise and safety-
oriented adaptation (Hasenj
¨
ager et al., 2019).
To implicitly (automatically) adapt the information
being presented in the driving assistance, it is nec-
essary to determine which processes will influence
the adaptation. In that sense, a data-driven process
is commonly employed that implies the creation of
a driver model which is based on the observation of
driving data (Wang et al., 2014; Lin et al., 2014). Us-
ing such a driver model, it is then possible to recog-
nize driving behaviour or expertise in certain tasks,
e.g. parking an articulated vehicle.
Besides this driver model, other information needs to
be considered as an input for the adaptation (Khan and
Khusro, 2020). For instance, information about the
environment, the vehicle, the IVIS, as well as the pref-
erences and profiles of the drivers. Based on such in-
put, the application of a rule-based approach has been
successfully employed to adapt the information being
presented to the user (Hussain et al., 2018; Khan and
Khusro, 2020). For instance, Hussain et al. (2018)
followed a model-based approach to adapt the user
interface. This approach is based on three different
models: (1) the context model (environmental factors
such as light level); (2) the user model (human fac-
tors such as experience or abilities) and (3) the device
model (such as the characteristics of the hardware and
ISAIC 2022 - International Symposium on Automation, Information and Computing
132

software). The resulting system is then capable to ap-
ply, at runtime, adaptation rules devised to properly
adapt the user interface according to the current con-
text. For example, whenever the light level is too low
the user interface is adapted to a night mode.
3 VR-SIMULATOR PLATFORM
In our VR-Simulator (VISTA-Sim, see Figure 2), the
driver wears a Virtual Reality headset that immerses
the driver inside a truck cabin located at a virtual dis-
tribution centre. Inside the VR truck cabin, there is
also an IVIS running on a virtual tablet computer. It
is responsible to provide driving assistive information
showing for example a bird-eye view of the distri-
bution centre, the distance to the target loading bay
and steering recommendations. Finally, VISTA-Sim
also allows the driver to operate the truck through
a steering wheel and pedals. VISTA-Sim is com-
posed of four main components: (1) a path plan-
ner combined with the path tracking controller which
runs in Simulink (MathWorks); (2) the VR-simulator
that uses the Unity 3D cross-platform game engine
(Unity); (3) the driver assistance Human Machine In-
terface (HMI); and (4) the Behaviour Analysis Mod-
ule (Ribeiro et al., 2021).
The focus of this paper is to present the current work
progress of the component “Driver Assistance HMI”.
The focus is on the design and implementation of an
adaptation mechanism that aims to provide individual
driver assistance based on expertise-estimation and
driving performance.
Figure 1: The high-level view of the VISTA-Sim architec-
ture.
4 ADAPTATION MECHANISM
ADAS should provide individualised and anticipative
feedback that minimizes driver distraction and pro-
vides only situation-specific, highly relevant informa-
tion. The proposed adaptation mechanism aims to
adaptively control the several IVIS subsystems to pro-
vide the best fitting support for drivers given the cur-
rent context. The IVIS adaptation mechanism relies
on three components: (1) the Rules; (2) the Adap-
tor; and (3) the Models. The machine learning model
that estimates driver expertise (see section 4.2) is part
of the Models-component. As input, the adaptation
mechanism receives a real-time expertise estimation
from a driver model that is responsible to determine
how good a driver is at performing the parking ma-
neuver (Ribeiro et al., 2021). The estimation is based
on real-time driving data recorded by the simulator
(e.g. steering wheel angle, head movements and other
data) and is used to determine when the Adaptive User
Interface(AUI) should be active. For example, if the
estimation predicts expert behavior, then the AUI is
currently not needed. If novice driver behavior is de-
tected, the system will adjust the IVIS in fixed inter-
vals to match the current needs of the user.
The Rule-based component describes when and under
which conditions changes to the IVIS User Interface
(UI) are applied, utilizing the commonly used Event,
Condition, Action (ECA) Approach (Hussain et al.,
2018). The event determines when a Rule is applied,
e.g. when a novice driver is detected by the perfor-
mance estimator. The Action states the change that
has to happen when the Event is triggered, like en-
abling more detailed assistance on the UI. The Condi-
tion holds information about what prerequisites need
to be met so that a Rule can be applied, e.g. a disabled
UI would prevent the application of any Rule with the
condition “UI is on”. The ECA template was mod-
ified to have five components. First, a unique id to
identify and distinguish it from other rules. Second, a
description of what this rule does when and which UI
elements will be affected in a human-readable way.
Third, a collection of events that state when the rule
is triggered. Fourth, a collection of conditions that
prevent or enable it. Finally, the fifth component is
a collection of actions that specify what happens to
which UI element.
On a conceptual level, the Adaptor component (see
Figure 3) is composed of: (1) the Evaluator; (2) the
Conflict resolver; and (3) the UI-Adaptor.
Whenever the Evaluator (see Figure 4) detects that
a value from the Performance estimator matches the
event of one or more rules, it checks if there is any
condition that prevents their application. When an
event matches multiple rules, it is important to verify
if the rules can be applied together. For example, the
rules “In the first phase of the manoeuvre the steering
assistance should be disabled” and “If the first phase
of the manoeuvre duration takes longer than two min-
Toward the Design of Personalised Adaptive Driver Assistance for Truck Docking
133
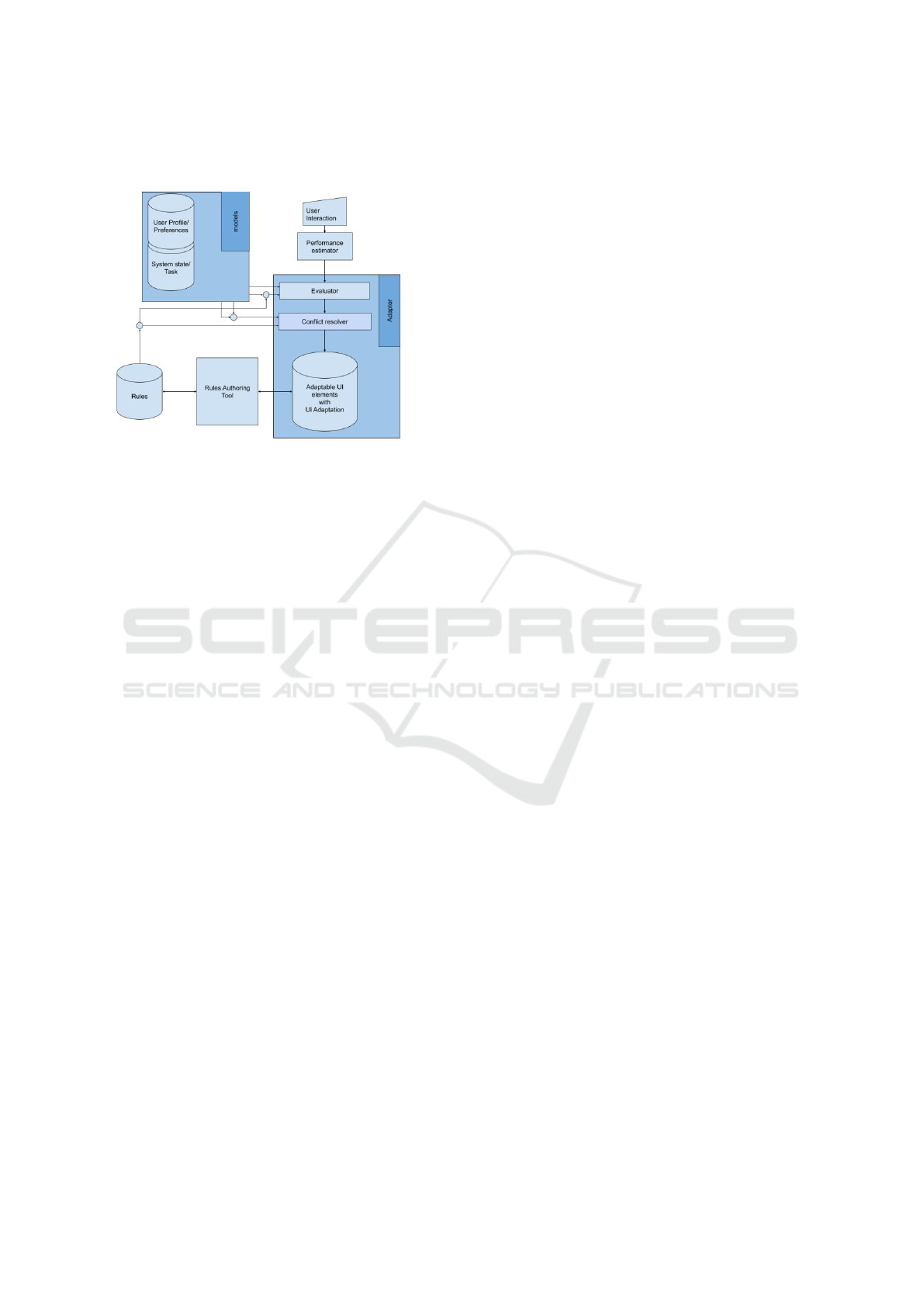
utes the steering assistance should be enabled” may
have a potential conflict.
Figure 2: Detailed view of the AUI Evaluator module of
the Adaptor-component. It uses four boolean decisions to
select a fitting set of rules for the current context.
In that sense, the role of the Conflict resolver compo-
nent is to detect and solve conflicts between the two
rules. The conflicts will be detected by checking the
actions that are associated with the respective rules.
For example, by analysing if the rules affect the same
UI object or enable the same UI modality. After de-
tection, conflict resolution strategies must be applied.
Although this component is still under development,
it is envisioned to extend rules with priorities and/or
the expected utility of an action (e.g. a rule with the
“safety” property will have a higher priority than one
without). Both approaches allow to resolve conflicts
between rules by excluding rules that fit less the cur-
rent requirements of docking safely. If there are con-
flicting rules remaining after the conflict resolution,
then they are all equally fit for the current context and
the resolver will return the first. Ultimately, even the
active involvement of the driver in the process of con-
flict resolution is under consideration. For example, a
user’s preference for a certain rule can be used to se-
lect this rule among the remaining rules after conflict
resolving. As the last step, a UI-Adaptor component
changes specific UI- elements according to the speci-
fied action of the prioritised rule.
The Models component contains information that fa-
cilitates the selection of the rules according to their
applicability. Examples are task phases, user prefer-
ences or user abilities. Since this component is still
at an early stage of conceptualization it will not be
further discussed in this paper.
4.1 Implementation in Unity
The functional prototype is being implemented in
Unity 3D according to the conceptualization men-
tioned in Section 4. The adaptation process starts
in the Performance estimator where a generic Unity-
Event is triggered whenever the driver’s expertise hits
a value range that corresponds to a level of expertise
(e.g. novice). Each level of expertise has an event at-
tached and when triggered. It invokes a list of Rule
IDs (strings keys) that are supposed to be executed.
For example, for the event “driver expertise is equal
to Novice” we could have one or more rules associ-
ated, such as “enable HMI”.
The Rule IDs are then processed in the Evaluator-
Class where they are used as keys to select the cor-
rect Rule-Object (Rule) from a map. The implemen-
tation of a Rule contains its Actions, which are com-
posed of a reference to all the Adaptable-UI-Objects
that are affected by it as well as which methods are to
be called and their parameters. Afterwards, the Ac-
tions reference is used to fetch its objects from the
Object-Map to adapt the UI.
The implementation of the adaptation does not have
a singular UI Adaptor. Instead, the adaptation is han-
dled by each Adaptable-UI-Object by a script that in-
herits from a virtual base class which provides them
with the Execute-Method that is called whenever a
rule is applied. The individual version of Execute-
Method handles how the adaptation is done. The cur-
rent implementation of the Adaptation mechanism is
not yet capable of taking system states or the user into
account or resolving conflicts.
4.2 Driver Expertise Estimation Model
Using machine learning, the system can adapt to the
driver based on previous behaviour. If the trained
system detects unexpected driver behaviour in a fa-
miliar situation, it can trigger warnings or supportive
feedback. Here, a ML-model was trained to predict
the driver’s expertise on-the-fly within a certain time-
frame. If a situation of low expertise is detected, the
system will provide context sensitive feedback to ease
the truck docking process.
Assuming that support can be helpful especially
during initial training of the docking process (e.g.
for novices), the ML-classifier should provide well-
balanced classification accuracy for both expert- and
novice behaviour. That way, novices will be provided
with extensive support, while expert drivers will see
only very specific, non-disturbing support.
To train a ML-model, a small dataset was collected
using the VISTA Sim: Four participants with no prior
truck driving experience performed a familiarization
session at the first day of docking training. Three
days later, the first training session started, followed
by another session the next day and a final session
ISAIC 2022 - International Symposium on Automation, Information and Computing
134
at the third day. Each day, five to six trials were
recorded. Recording of a trial was stopped if dock-
ing failed after seven forward-backward reposition-
attempts (turns). The maximum turn amount was
based on a previous pilot-dataset, where an already-
trained driver completed docking with no more than
five turns. Two extra turns were given to ease initial
learning progress and to aquire more trials with a rat-
ing above zero (see below).
The final dataset consists of 74 trials. Each trial in the
dataset was rated by the first-author on a scale from
0 to 5 using the docking quality as an objective cri-
terion (rating: 0 = did not park; 1,2: unloading not
possible; 3,4: unloading possible; 5: perfect dock-
ing). This docking-quality rating was used to separate
trials into novice- and expert trials. The dataset con-
tains a large number of trials rated with 0, underlining
that truck-docking is indeed a quite complicated task.
Most machine learning methods work best given a
balanced dataset with equal number of trials per class.
Because of the comparatively small number of trials
and the strong imbalance, the dataset was split into
only two classes: expert- and novice trials. All trials
with a zero-rating (’did not park’) were assigned to the
novice class (n=41) and all other trials were assigned
to the expert class (n=33). With these two classes, the
dataset is still moderately imbalanced.
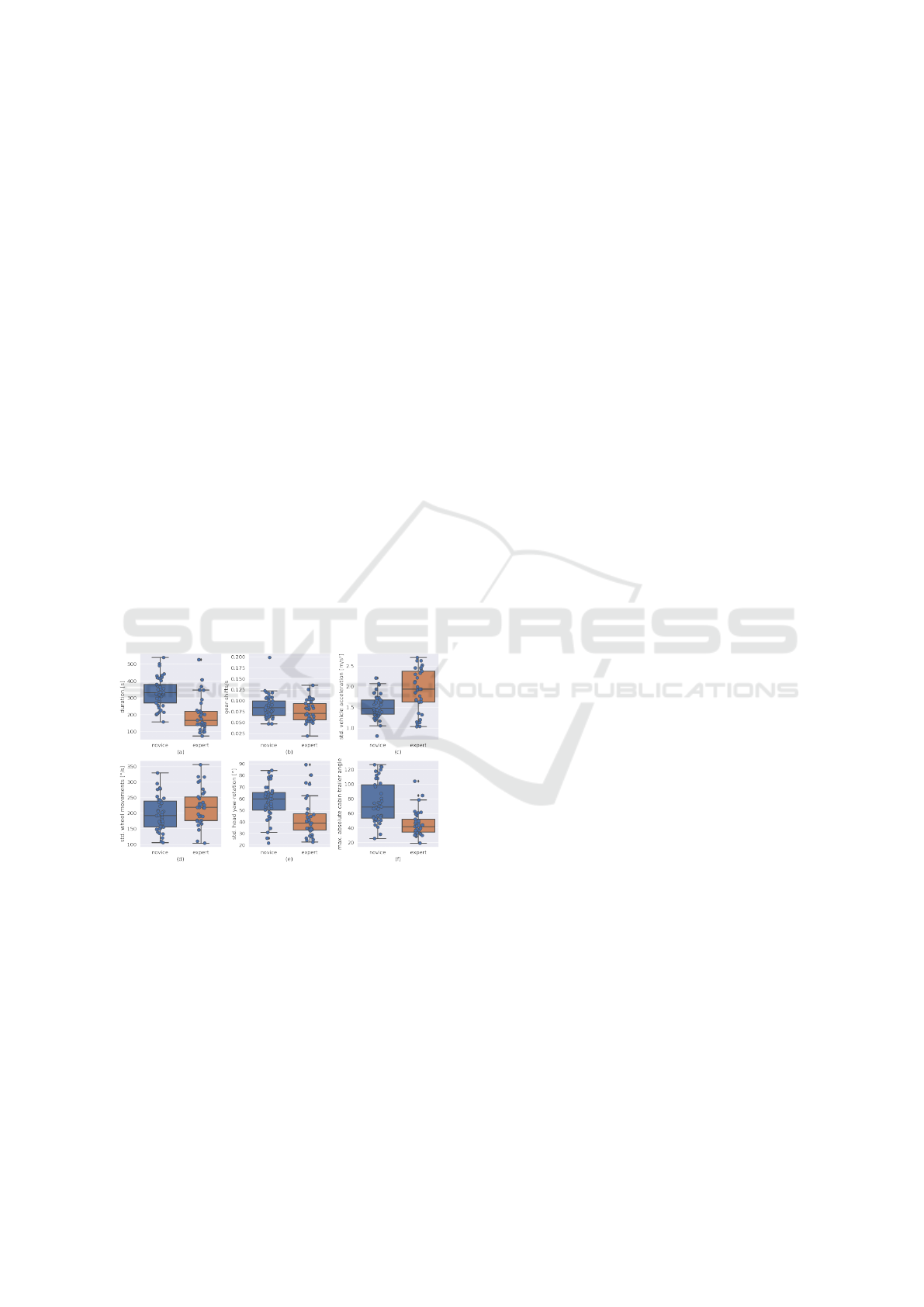
Figure 3: Features for ML-learning, extracted from the
dataset. Some features correlate with expertise, e.g. head
horizontal movements (e) and the cabin-trailer angle (f).
The recorded dataset was analysed with respect to
several key performance indicators suggested by a
professional truck-driving instructor (for details see
(Ribeiro et al., 2021)). Here, we focus on perfor-
mance indicators that are locally observable inside
the truck cabin: docking duration, gear shifts, vehicle
acceleration, steering wheel movements, head move-
ments and the cabin-trailer angle. Figure 5 shows that
some of the analysed performance indicators clearly
correlate with the expertise level, visible by non- or
slightly overlapping box-plots.
For comparison with ML-trained based classifiers, a
simple baseline-classifier (BC) was implemented us-
ing the three features with strong predictive power
(vehicle acceleration, head movements and cabin
trailer angle, see Figure 5). The BC performs
simple thresholding per feature and combines the
feature-specific classification results using majority
voting. Optimal threshold values were selected by
grid-search. With two classes, we have a binary clas-
sification task: Expert trials were assigned to the pos-
itive class, and novice trials to the negative class. Ap-
plied to the complete dataset and full trial-length, the
BC yields within-class accuracies of 82% for the ex-
pert class (i.e. true-positive rate (TPR), also known as
recall / sensitivity) and 90% for the novice-class (true
negative rate (TNR), also known as specificity) and a
balanced accuracy (the average of TPR and TNR) of
86%. This is a promising but probably over-optimistic
result, because the BC-thresholds were adjusted given
the full dataset.
A classifier trained on full trials can only provide
an expertise estimation at the end of a trial. This
estimation could be used to provide adequate feed-
back for the next docking attempt, but a better so-
lution would be a classifier that can estimate driver
performance within a shorter timeframe (sliding win-
dow approach). Therefore, support vector machines
(SVM) were trained on three different, bootstrapped
datasets consisting of sub-trials with a predefined du-
ration (25 seconds, 50s and 75s). From each trial
in the dataset, 50 sub-trials were randomly sampled.
The SVMs (RBF kernel, C=0.001) were trained using
leave-one-out cross-validation, with generalisation
evaluated at the level of individual trials. Hence, each
trial was left out once, resulting in 74 folds. The train-
ing set of each fold was balanced using the synthetic
minority over-sampling technique (SMOTE, (Chawla
et al., 2002)), because SVM training is very sensi-
tive to class-imbalance (Akbani et al., 2004). Cross-
validation was repeated ten times, because SMOTE is
stochastic.
SVM-Training Results: The balanced accuracy de-
pends - as expected - on the window size. It drops
only slightly from a window size of 75s to a window
size of 50s (see Figure 6). Hence, a duration of 50
seconds appears to be a suitable compromise between
“classifier response delay” (time until the first exper-
tise estimation is available) and accuracy. Accuracy –
especially for the expert class – drops noticeably com-
pared to observing full trials (see baseline classifier).
This means that the proposed hybrid approach, mix-
ing ML and the rule-based approach might help to re-
duce uncertainty regarding observed driver expertise
within shorter timeframes.
Toward the Design of Personalised Adaptive Driver Assistance for Truck Docking
135
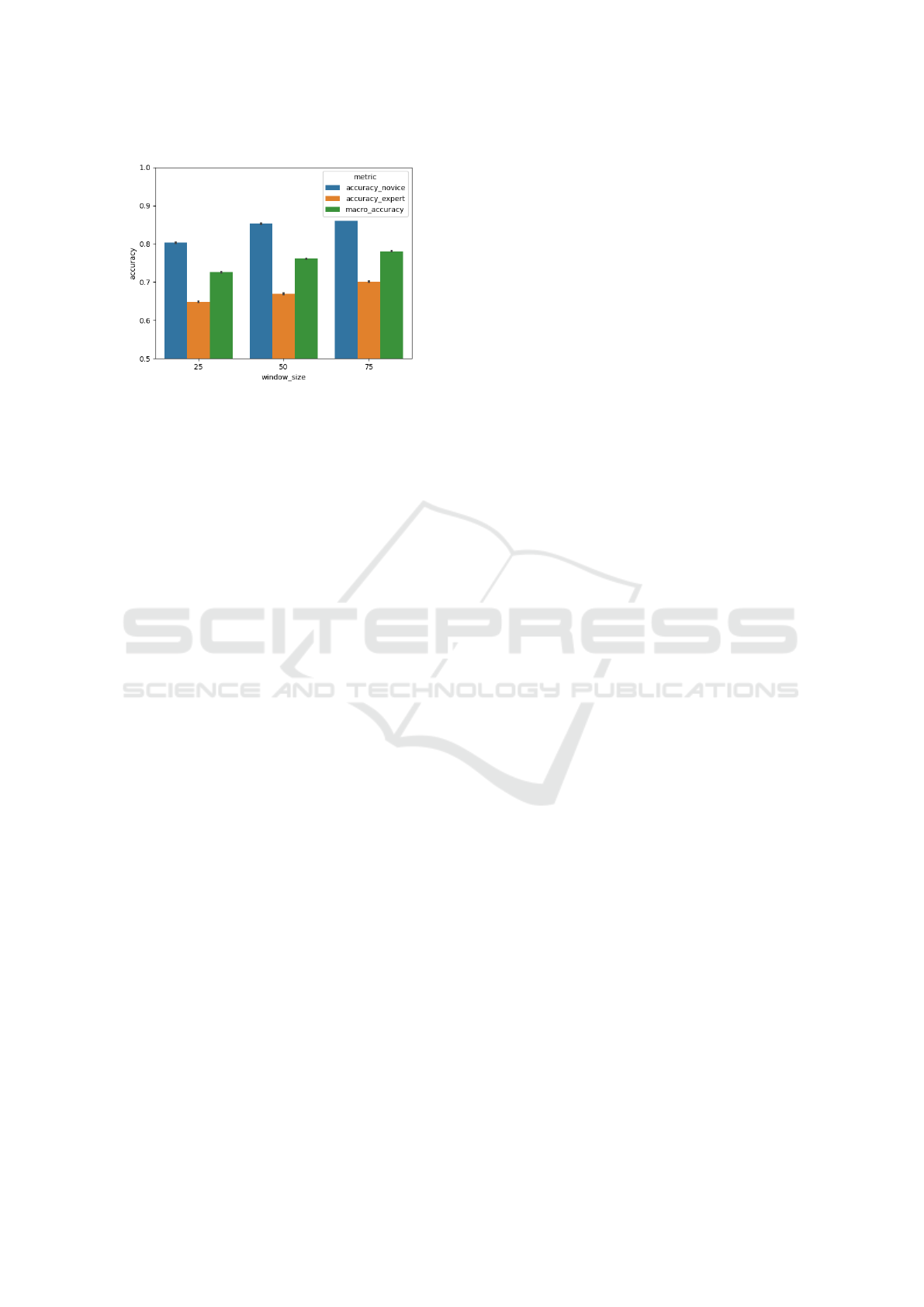
Figure 4: The performance of trained SVMs depends on the
observation timeframe (window size in seconds).
5 CONCLUSIONS & FUTURE
WORK
In this paper, we have presented ongoing work that
targets the design and development of an adaptation
mechanism for driver assistance. This adaptation
mechanism will provide individualised driver assis-
tance based on estimated driver expertise and aims to
support professional truck drivers in the challenging
task of backwards manoeuvring articulated vehicles
towards a loading bay at a distribution centre.
Rule-based adaptation: As a next step, the design
of the adaptation rules will be guided by a detailed
analysis of the thinking aloud protocols and question-
naires collected during recording of the dataset, e.g.
problems experienced while docking. The observa-
tions and comments will inform a post-interview on
which the adaptation rules will be based. The not
yet fully implemented AUI components will be fur-
ther developed. The development of a task model
will require a task analysis (a breakdown into phases,
tasks, and subtasks) of the docking manoeuvre. Fur-
ther, a detection mechanism is required to determine
in which phase the driver currently is. The rule adap-
tion needs such a detector to know what the driver is
currently supposed to do to apply rules that are made
for this phase/task or sub-task. The Driver model (i.e.
an individual profile) will require further research on
user profiles for automotive applications. Individ-
ual driver profiles will allow the system to also take
the current driver requirements (preferences, impair-
ments, skills, etc.) into account when applying rules.
For example, such an individual user model could be
initialized once by the driver and then continuously
updated with a running-average of previous docking-
performances to provide a robust and stable adapta-
tion of the UI. For the Resolver, the concept described
in section 4 needs to be implemented, and the priority
and the expected utility properties need to be defined
further.
Machine learning: The current dataset is compara-
tively small. Larger or more complex models like
recurrent neural networks (RNN) or attention-based
RNN (Vaswani et al., 2017) might show overfitting.
Therefore, it is planned to evaluate and compare spe-
cial machine learning methods well suited for small
datasets, e.g. few-shot learning (Wang et al., 2020).
Further, methods with a low energy consumption and
fast training times (e.g. random projection methods,
(Krause et al., 2013)) will be explored. This is impor-
tant for the future goal of continuous, “lifelong” ma-
chine learning (Chen and Liu, 2018) on a low-power,
embedded system inside a vehicle to continuously up-
date an individual expertise estimator model for each
driver.
Future work: In the future, it is also planned to do
a study regarding implicit and explicit adaptation be-
cause - as shown in previous studies (Hussain et al.,
2018; Bongartz et al., 2012; Todi et al., 2021) - fre-
quent, unnotified changes can frustrate and confuse
the user. To answer, if implicit or explicit adaptation
is better for the AUI of the VISTA-Sim, it is planned
to do an A/B test where one group performs docking
with an implicit and the other with an explicit version
of the AUI. Explicit here would likely mean by voice
command e.g. ”Can you help me” which would trig-
ger the adaptation of the AUI. To not waste too many
resources by implementing both versions a Wizard of
Oz approach is likely.
ACKNOWLEDGEMENTS
This Interreg V-A project was co-financed by the
European Union via the INTERREG Deutschland-
Nederland programme, the Ministerium f
¨
ur
Wirtschaft, Innovation, Digitalisierung und En-
ergie of Nordrhein-Westfalen and the Province of
Gelderland.
ISAIC 2022 - International Symposium on Automation, Information and Computing
136

REFERENCES
Akbani, R., Kwek, S., and Japkowicz, N. (2004). Applying
support vector machines to imbalanced datasets. In
European conference on machine learning, pages 39–
50. Springer.
Arrieta, A. B., D
´
ıaz-Rodr
´
ıguez, N., Del Ser, J., Bennetot,
A., Tabik, S., Barbado, A., Garc
´
ıa, S., Gil-L
´
opez, S.,
Molina, D., Benjamins, R., et al. (2020). Explainable
artificial intelligence (xai): Concepts, taxonomies, op-
portunities and challenges toward responsible ai. In-
formation fusion, 58:82–115.
Bongartz, S., Jin, Y., Patern
`
o, F., Rett, J., Santoro, C., and
Spano, L. D. (2012). Adaptive user interfaces for
smart environments with the support of model-based
languages. In International Joint Conference on Am-
bient Intelligence, pages 33–48. Springer.
Chawla, N. V., Bowyer, K. W., Hall, L. O., and Kegelmeyer,
W. P. (2002). Smote: synthetic minority over-
sampling technique. Journal of artificial intelligence
research, 16:321–357.
Chen, Z. and Liu, B. (2018). Lifelong machine learning.
Synthesis Lectures on Artificial Intelligence and Ma-
chine Learning, 12(3):1–207.
Fan, H. and Poole, M. S. (2006). What is personaliza-
tion? perspectives on the design and implementation
of personalization in information systems. Journal of
Organizational Computing and Electronic Commerce,
16(3-4):179–202.
Hasenj
¨
ager, M., Heckmann, M., and Wersing, H. (2019).
A survey of personalization for advanced driver assis-
tance systems. IEEE Transactions on Intelligent Vehi-
cles, 5(2):335–344.
Hussain, J., Ul Hassan, A., Muhammad Bilal, H. S., Ali, R.,
Afzal, M., Hussain, S., Bang, J., Banos, O., and Lee,
S. (2018). Model-based adaptive user interface based
on context and user experience evaluation. Journal on
Multimodal User Interfaces, 12(1):1–16.
Khan, I. and Khusro, S. (2020). Towards the design of
context-aware adaptive user interfaces to minimize
drivers’ distractions. Mobile Information Systems,
2020.
Krause, A. F., Essig, K., Piefke, M., and Schack, T.
(2013). No-prop-fast-a high-speed multilayer neu-
ral network learning algorithm: mnist benchmark and
eye-tracking data classification. In International Con-
ference on Engineering Applications of Neural Net-
works, pages 446–455. Springer.
Kural, K., Besselink, I., Xu, Y., Tomar, A., and Nijmeijer,
H. (2016). A driver support system for improved ma-
neuvering of articulated vehicles using an unmanned
aerial vehicle. In HVTT14: International Sympo-
sium on Heavy Vehicle Transport Technology, Ro-
torua, New Zealand.
Kusumakar, R., Kural, K., Tomar, A. S., and Pyman, B.
(2017). Autonomous parking for articulated vehicles.
HAN University of Applied Science, Netherlands.
Lilis, Y., Zidianakis, E., Partarakis, N., Antona, M., and
Stephanidis, C. (2017). Personalizing hmi elements
in adas using ontology meta-models and rule based
reasoning. In International Conference on Universal
Access in Human-Computer Interaction, pages 383–
401. Springer.
Lin, N., Zong, C., Tomizuka, M., Song, P., Zhang, Z., and
Li, G. (2014). An overview on study of identification
of driver behavior characteristics for automotive con-
trol. Mathematical Problems in Engineering, 2014.
Ribeiro, P., Krause, A. F., Meesters, P., Kural, K., van Kolf-
schoten, J., B
¨
uchner, M.-A., Ohlmann, J., Ressel, C.,
Benders, J., and Essig, K. (2021). A vr truck docking
simulator platform for developing personalized driver
assistance. Applied Sciences, 11(19):8911.
Riener, A., Boll, S., and Kun, A. L. (2016). Automotive
user interfaces in the age of automation (dagstuhl sem-
inar 16262). In Dagstuhl reports, volume 6. Schloss
Dagstuhl-Leibniz-Zentrum fuer Informatik.
Stuerzlinger, W., Chapuis, O., Phillips, D., and Roussel, N.
(2006). User interface fac¸ades: towards fully adapt-
able user interfaces. In Proceedings of the 19th an-
nual ACM symposium on User interface software and
technology, pages 309–318.
Sun, X., Li, J., Tang, P., Zhou, S., Peng, X., Li, H. N., and
Wang, Q. (2020). Exploring personalised autonomous
vehicles to influence user trust. Cognitive Computa-
tion, 12(6):1170–1186.
Todi, K., Bailly, G., Leiva, L., and Oulasvirta, A. (2021).
Adapting user interfaces with model-based reinforce-
ment learning. In Proceedings of the 2021 CHI Con-
ference on Human Factors in Computing Systems,
pages 1–13.
Ulahannan, A., Cain, R., Thompson, S., Skrypchuk, L.,
Mouzakitis, A., Jennings, P., and Birrell, S. (2020).
User expectations of partial driving automation capa-
bilities and their effect on information design prefer-
ences in the vehicle. Applied Ergonomics, 82:102969.
Ulahannan, A., Thompson, S., Jennings, P., and Birrell,
S. (2021). Using glance behaviour to inform the de-
sign of adaptive hmi for partially automated vehicles.
IEEE Transactions on Intelligent Transportation Sys-
tems, 23(5):4877–4892.
Union, I. R. T. (2007). A scientific study “etac” european
truck accident causation: Executive summary and rec-
ommendations.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Wang, W., Xi, J., and Chen, H. (2014). Modeling and rec-
ognizing driver behavior based on driving data: A sur-
vey. Mathematical Problems in Engineering, 2014.
Wang, Y., Yao, Q., Kwok, J. T., and Ni, L. M. (2020). Gen-
eralizing from a few examples: A survey on few-shot
learning. ACM computing surveys (csur), 53(3):1–34.
Toward the Design of Personalised Adaptive Driver Assistance for Truck Docking
137
