
Meaningful Guidance of Unmanned Aerial Vehicles in Dynamic
Environments
Marius Dudek
a
and Axel Schulte
b
Institute of Flight Systems, Universität der Bundeswehr München, Werner-Heisenberg-Weg 39, Neubiberg, Germany
Keywords: UAV, Guidance, Manned-Unmanned Teaming, Feedback, Behavior Generation.
Abstract: In this contribution, we discuss requirements to guide UAVs from a fighter-jet cockpit. First, we introduce
the definition of tasks as a means of common understanding between human and automation and provide a
taxonomy to define these tasks. Based on this definition, we identify the information that are necessary for
task delegation and define requirements for UAV processing methods, and UAV feedback. Required
information for task delegation includes the information of the task itself as about how the task is to be
distributed among platforms. UAV processing methods should allow the integration of an explanation
component to provide adequate feedback to the pilot. With respect to feedback, we analyse potential measures
that can be integrated into such an explanation component. Future research should address the implementation
and evaluation of task delegation methods and the integration and evaluation of feedback in UAV agents.
1 INTRODUCTION
Human pilots and unmanned aerial vehicles work
together to achieve common military objectives in
manned-unmanned teaming (MUM-T). It is still an
open question how exactly the interaction between
pilot and unmanned systems will look like in an
aircraft cockpit. In most approaches, the unmanned
platforms are delegated by the pilot who is
responsible for monitoring the derived actions (Miller
et al., 2005; Uhrmann and Schulte, 2012; Doherty,
Heintz and Kvarnström, 2013).
In modern air combat, the tactical situation can
change within minutes or even seconds requiring
pilots to adjust their plan. When pilots are responsible
for guiding multiple unmanned aircraft in addition to
their own aircraft, time pressure for plan corrections
will be vast. This pressure will further intensify when
technological advances enhance decision-making
times (e.g. by decision support systems and
automated task execution).
To accelerate decision-making, more authority
may be given towards automation or capable data-
driven methods may be used. However, it is not clear
if the pilot remains in meaningful control, when
authority is transferred to automation and when
a
https://orcid.org/0000-0002-1562-3409
b
https://orcid.org/0000-0001-9445-6911
decision-making is moved into uninterpretable
algorithms (Lepri, Staiano, Sangokoya, Letouzé, &
Oliver, 2017; Parasuraman, Sheridan, & Wickens,
2000).
Therefore, in this article, we want to discuss
requirements to enable meaningful control of
unmanned aerial vehicles in a highly dynamic
military environment. We will discuss the
formulation of tasks as a means of common
understanding between human and automation and
requirements for task delegation, UAV processing
methods and UAV feedback.
2 TASK-BASED GUIDANCE
The distribution of roles and interaction between pilot
and UAVs in manned-unmanned teaming can be
described with the design patterns proposed by
(Schulte, Donath, & Lange, 2016). To delegate
UAVs, we need a common understanding of what
should be done by the automation (Miller &
Parasuraman, 2007). For this, we use a design pattern
called task-based guidance, in which the pilot assigns
high-level tasks to UAV agents aboard the unmanned
systems, which, in turn, are responsible for task
10
Dudek, M. and Schulte, A.
Meaningful Guidance of Unmanned Aerial Vehicles in Dynamic Environments.
DOI: 10.5220/0011946500003622
In Proceedings of the 1st International Conference on Cognitive Aircraft Systems (ICCAS 2022), pages 10-14
ISBN: 978-989-758-657-6
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
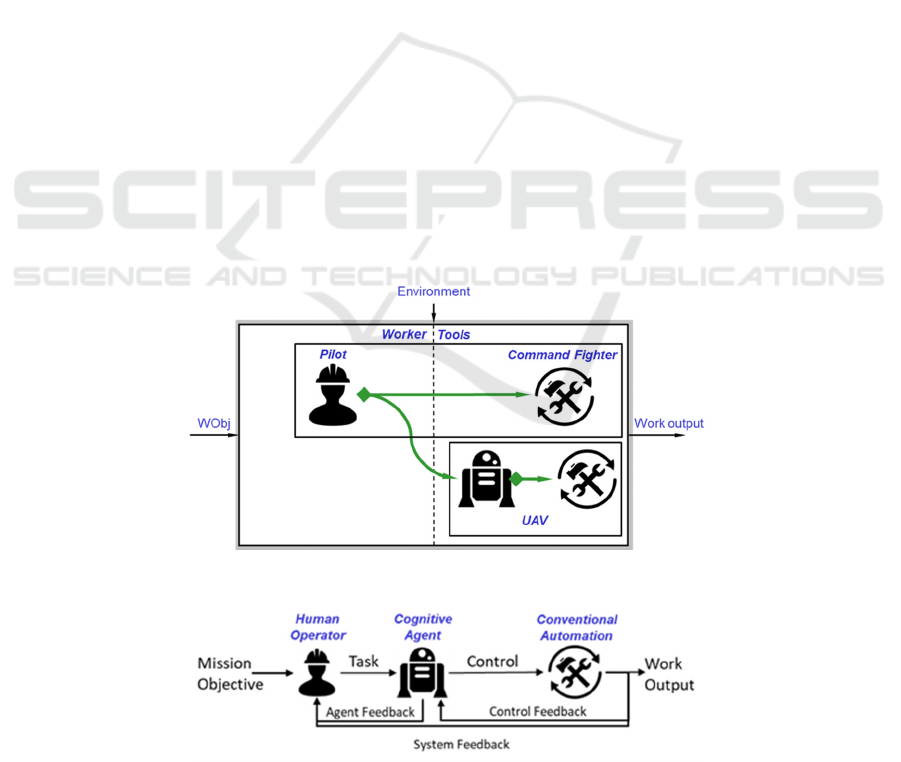
comprehension, decomposition and execution. An
exemplary work system for task-based guidance of a
single UAVs is shown in Figure 1.
The interaction between human pilot and UAV
agent in the above work system can also be
represented as an information flow (Figure 2).
The human pilot receives the mission objectives
and assigns tasks to the UAV agents. These agents
process the assigned tasks by controlling the
conventional automation aboard the aircraft (e.g.
Flight Management System) and providing feedback
to the human operator. In this contribution, we focus
on the interactions between pilot and UAV agents, i.e.
task definition, task delegation, behavior generation
and agent feedback.
2.1 Task Definition
As a first step, we define military UAV tasks by a
taxonomy adapted from (Lindner, Schwerd, &
Schulte, 2019). In this taxonomy, tasks consist of the
following components:
• Action: Actions represent military subgoals,
such as the reconnaissance of a building.
• Target: The target to perform actions on. The
variability of different object types can be
abstracted to few spatial regions according to
(Saget, Legras, & Coppin, 2009). We
represent each object with a so-called Feature
in one of the four geometric types Point,
Moving Point, Line or Area.
• Success criteria: Criteria that define whether
the task failed or succeeded. Possible success
criteria depend on action and target.
• Constraints: Conditions or limiting factors
such as resources or time requirements. The
type and number of possible constraints
depends on the respective task action (e.g.,
depression angle during reconnaissance).
2.2 Task Delegation
A delegation consists of Task Specification and Task
Assignment. Task Specification means the creation of
a task with the components described before, whereas
Task Assignment means the distribution process of
this task to an eligible platform. Considerations for
this distribution process may be the spatial
distribution of platforms as well as previously
assigned tasks and resource availability for each
platform. The requirements that these two elements
entail on the delegation interaction are described
below.
With regard to Task Specification, the interaction
must at least cover the specification of action and
target. The definition of a success criteria may be
obligatory for some tasks, while others have criteria
that can be concluded by the action. The definition of
constraints is optional, because constraints only limit
Figure 1: Work System for Task-based Guidance of a single UAV.
Figure 2: Information Flow in Task-Based Guidance.
Meaningful Guidance of Unmanned Aerial Vehicles in Dynamic Environments
11
the possibilities on how the tasks can be executed
(e.g. time constraints) or because they specify values
that could otherwise also be chosen by the system
(e.g. depression angle).
The interaction also has to support a platform
selection process during Task Assignment. This is
because after the assignment, the generated task must
be executed by a specific platform at a specific time.
Different options exist on how this platform selection
process is designed such as platform-based
approaches (Heilemann & Schulte, 2020) or
capability-based approaches (Besada et al., 2019), all
of which could be assisted by automation or not.
Regardless of the specific implementation, these
delegation options place additional demands on the
user interaction. In a platform-based approach, for
example, the pilot has to name the platform whereas
in a capability-based approach the pilot has to specify
a timing for execution.
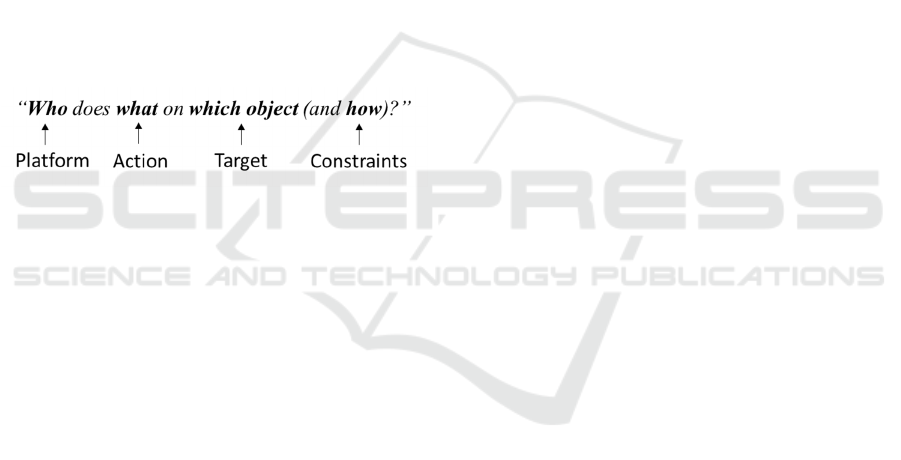
In summary, the delegation interaction must
contain all elements to answer the question (Figure
3):
Figure 3: Elements of a delegation interaction.
There are different interaction design approaches
to answer this question for guidance of UAVs from
inside a fighter cockpit. Some are based on
touchscreen interaction, others use voice interaction
or cursor control devices. The individual benefits of
these different interactions are still under research
(Calhoun, Ruff, Behymer, & Rothwell, 2017; Dudek
& Schulte, 2022; Levulis, DeLucia, & Kim, 2018).
2.3 Behavior Generation
The cognitive agents aboard of UAVs are responsible
for decomposing and executing the assigned tasks.
For this, cognitive agents have to consider the tactical
situation and select the most appropriate action
among a set of possible actions.
To do so, various processing methods exist in
UAV control domain that depend on knowledge
representation, machine learning or optimization
(Emel’yanov, Makarov, Panov, & Yakovlev, 2016).
While each of these approaches has individual
advantages when used for UAV behavior generation,
one capability is particularly necessary for
meaningful guidance of unmanned aerial vehicles:
decision making transparency.
To be able to provide reasonable feedback to the
human pilot, the algorithm used at high-level decision
making must allow embedding an explanation
component, that creates action, goal and/or status
feedback throughout the behavior generation. Model-
based approaches are well suited for this requirement,
because feedback can easily be integrated in the
control flow.
2.4 Feedback
One of the most important characteristics of a
cognitive agent is that it provides appropriate
feedback to the pilot. (Chen, Barnes, Selkowitz, &
Stowers, 2016) showed that agent decision-making
transparency can benefit operator performance and
support appropriate levels of trust. However, UAV
agent feedback is not defined by transparency alone.
Instead, agent feedback can be categorized into three
modes:
1. Transparency: Measures that attempt to
disclose agent decisions to the human pilot fall
into this category. Feedback in this category
can be classified by the Situation Awareness-
based Agent Transparency (SAT) levels.
2. Assistance: Assistance offers troubleshooting
steps based on a faulty condition, whether
caused by a change in the environment or by
incorrect pilot inputs.
3. Interaction: Pilot interventions on a lower-
level than the definition of tasks.
We analysed the delegation process of task-based
guidance to identify potential feedback measures in
these categories (Table 1).
3 GUIDANCE APPROACHES
After defining the requirements for meaningful
guidance of UAVs, we want to present our research
to fulfilling these requirements. We implemented
tasking interactions using voice and touch input
modalities and investigated the effects of these
modalities on mission performance and modality
preferences. We plan to further investigate the
observed effects and implement multimodal tasking
interactions. For the behavior generation, we used
Behavior Trees, in which we also integrated a
feedback creation component, that we use for action
feedback and assistance generation. Regarding
feedback, we plan to define a taxonomy for the
different types of feedback and to map feedback on
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
12
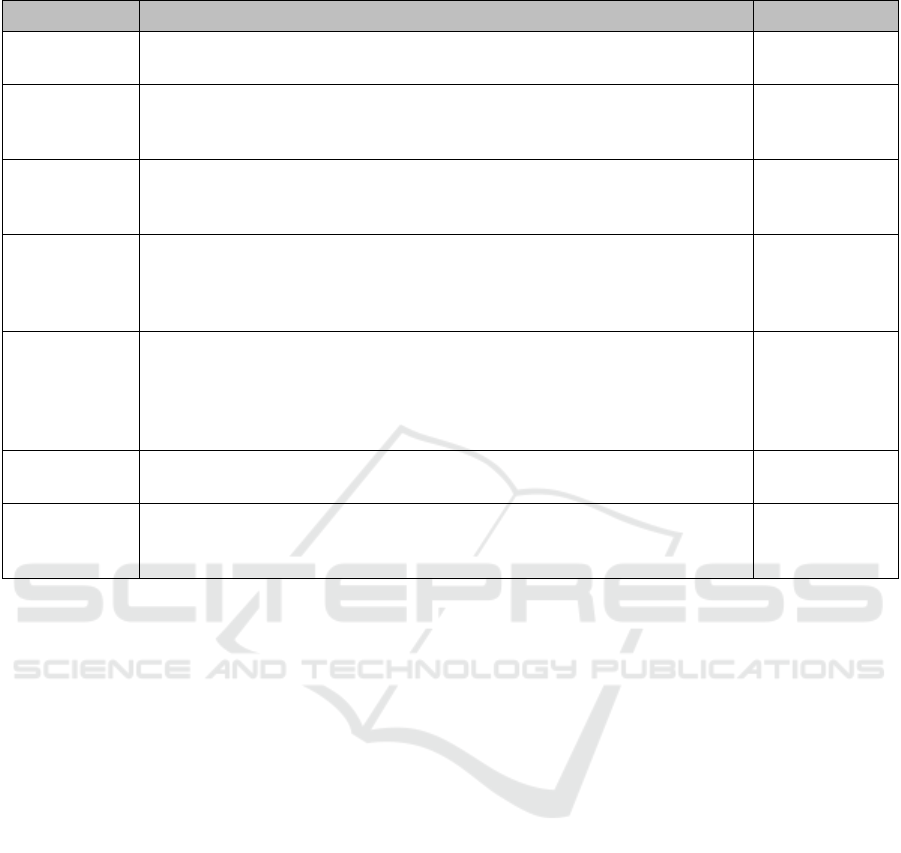
Table 1: Potential Feedback Measures in Task-based Guidance.
Timing Description Mode
Task
specification
The task created by the pilot is checked for plausibility, offering
alternatives for unfeasible task parameterization.
Assistance
Task
assignment
Feedback can be given for tasks that are not in accordance with the
mission objectives or for tasks that do not meet constraints with other
tasks.
Assistance
Before task
execution
A description of the desired action chain is appropriate at this point to
externalize the UAV behavior model and convey a common
understanding of the assigned task (SAT level 1/2).
Transparency
During task
execution
Displaying the current action of each UAV can increase situation
awareness during task execution (SAT level 1). For higher SAT levels,
reasons for action selection can be displayed and projections on action
changes can be made.
Transparency
During task
execution
For tasks covering a wide scope of actions, involving the user in the
choice of action could be beneficial to situation awareness and
performance because the human pilot is not only involved with passive
monitoring but also with contributing to the task, which could increase
vigilance (Parasuraman, 1987).
Interaction
During task
execution
The pilot can be informed, when the prediction changes whether goals
can be achieved (SAT level 3).
Transparency
After task
execution
After a task, the most important feedback is whether a task was
completed successfully or whether it failed. Furthermore, providing an
overview of resource usage can be beneficial.
Transparency
different modalities as a succeeding step. We also
want to investigate the effects of different types of
feedback on mission performance and situation
awareness.
REFERENCES
Besada, J. A., Bernardos, A. M., Bergesio, L., Vaquero, D.,
Campana, I., & Casar, J. R. (2019). Drones-as-a-
service: A management architecture to provide mission
planning, resource brokerage and operation support for
fleets of drones. In IEEE International Conference on
Pervasive Computing and Communications Workshops
(pp. 931–936). IEEE. https://doi.org/10.1109/PERCO
MW.2019.8730838
Calhoun, G. L., Ruff, H. A., Behymer, K. J., & Rothwell,
C. D. (2017). Evaluation of Interface Modality for
Control of Multiple Unmanned Vehicles. In D. Harris
(Ed.), Engineering Psychology and Cognitive
Ergonomics: Cognition and Design (pp. 15–34). Cham:
Springer International Publishing. https://doi.org/10.10
07/978-3-319-58475-1_2
Chen, J. Y., Barnes, M. J., Selkowitz, A. R., & Stowers, K.
(2016). Effects of Agent Transparency on human-
autonomy teaming effectiveness. In IEEE International
Conference on Systems, Man, and Cybernetics (SMC)
(pp. 1838–1843). IEEE. https://doi.org/10.1109/
SMC.2016.7844505
Dudek, M., & Schulte, A. (2022). Effects of Tasking
Modalities in Manned-Unmanned Teaming Missions.
In AIAA SCITECH 2022 Forum. Reston, Virginia:
American Institute of Aeronautics and Astronautics.
https://doi.org/10.2514/6.2022-2478
Emel’yanov, S., Makarov, D., Panov, A. I., & Yakovlev, K.
(2016). Multilayer cognitive architecture for UAV
control. Cognitive Systems Research, 39, 58–72.
https://doi.org/10.1016/j.cogsys.2015.12.008
Heilemann, F., & Schulte, A. (2020). Time Line Based
Tasking Concept for MUM-T Mission Planning with
Multiple Delegation Levels. In T. Z. Ahram, W.
Karwowski, A. Vergnano, F. Leali, & R. Taïar (Eds.),
Advances in Intelligent Systems and Computing: Vol.
1131, Intelligent Human Systems Integration 2020 (1st
ed., pp. 1014–1020). Cham: Springer International
Publishing.
Lepri, B., Staiano, J., Sangokoya, D., Letouzé, E., & Oliver,
N. (2017). The Tyranny of Data? The Bright and Dark
Sides of Data-Driven Decision-Making for Social
Good. In T. Cerquitelli, D. Quercia, & F. Pasquale
(Eds.), Studies in Big Data: Vol. 32. Transparent Data
Mining for Big and Small Data (Vol. 32, pp. 3–24).
Cham: Springer International Publishing.
https://doi.org/10.1007/978-3-319-54024-5_1
Levulis, S. J., DeLucia, P. R., & Kim, S. Y. (2018). Effects
of Touch, Voice, and Multimodal Input, and Task Load
Meaningful Guidance of Unmanned Aerial Vehicles in Dynamic Environments
13

on Multiple-UAV Monitoring Performance During
Simulated Manned-Unmanned Teaming in a Military
Helicopter. Proceedings of the Human Factors and
Ergonomics Society Annual Meeting, 60(8), 1117–
1129. https://doi.org/10.1177/0018720818788995
Lindner, S., Schwerd, S., & Schulte, A. (2019). Defining
Generic Tasks to Guide UAVs in a MUM-T Aerial
Combat Environment. In W. Karwowski & T. Ahram
(Eds.), Intelligent Human Systems Integration 2019
(pp. 777–782). Springer Nature Switzerland.
Miller, C. A., & Parasuraman, R. (2007). Designing for
flexible interaction between humans and automation:
Delegation interfaces for supervisory control. Human
Factors, 49(1), 57–75. https://doi.org/10.1518/001872
007779598037
Parasuraman, R. (1987). Human-Computer Monitoring.
Human Factors, 29(6), 695–706. https://doi.org/
10.1177/001872088702900609
Parasuraman, R., Sheridan, T. B., & Wickens, C. D. (2000).
A model for types and levels of human interaction with
automation. IEEE Transactions on Systems, Man, and
Cybernetics. Part A, Systems and Humans A
Publication of the IEEE Systems, Man, and Cybernetics
Society, 30(3), 286–297. https://doi.org/10.1109/34
68.844354
Saget, S., Legras, F., & Coppin, G. (2009). Cooperative
Ground Operator Interface for the Next Generation of
UVS. In AIAA (American Institute of Aeronautics and
Astronautics) Infotech@Aerospace, 6 - 9 April, Seattle,
WA, USA. Retrieved from https://www.research
gate.net/profile/francois-legras/publication/234079150
_cooperative_ground_operator_interface_for_the_next
_generation_of_uvs
Schulte, A., Donath, D., & Lange, D. S. (2016). Design
Patterns for Human-Cognitive Agent Teaming. In D.
Harris (Ed.), Engineering Psychology and Cognitive
Ergonomics (pp. 231–243). Cham: Springer
International Publishing. https://doi.org/10.1007/978-
3-319-40030-3_24
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
14
