
Research on Human Gesture Recognition Algorithm Based on
Multi-Scale Sparse Neural Network
Lexuan Huang
1
, Shenggang Yan
2,*
and Jianguo Liu
2
1
Shanghai United International School, Gubei Secondary Campus, Shanghai 201103, China
2
School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China
Keywords: Human Gesture Recognition, Multiscale Sparse Neural Networks, Time Series Data.
Abstract: Human posture classification, as a part of human activity recognition, has a wide range of applications in
medical treatment, nursing, sports injury protection, safety monitoring, and other fields. Along with the
increasing hardware computing power and storage performance, an extensive amount of large data can be
stored and computed as time series in real-time. But in the face of vast amount of data generated by inertial
sensors, there is still a lot of room for development in real-time data processing. Multiscale Sparse Neural
Networks are in this paper, realize the judgment and classification of the posture of the human body. The data
is the human body pose by the nine-axis inertial sensor and the huge amount of data and real-time calculation
have been taken into account. Compared to other methods, ours performs state-of-the-art on the WISDM and
UCI-HAR datasets, and achieves good results on our own datasets.
1 INTRODUCTION
With the rapid development of electronic and
information technology, mobile phones have become
indispensable personal products. The sensors in
mobile phones, such as built-in gyroscopes and
magnetometers, can help people do assorted online
activities. These sensors integrate the tools that
people need into a small and convenient mobile
phone. In particular, the acceleration-based step
counter can help individuals understand their physical
activities, to achieve multiple purposes such as
calorie calculation (Nweke et al., 2018; Dirac et al.,
2013). Although the existing step counter is more
accurate for calculating the number of steps, it will
mistakenly judge other non-walking situations as the
walking state due to the change of the relative
position. Based on this question, the following
thoughts can be drawn. Can the sensor be used to
distinguish the user's action status? So as to
distinguish different travel modes, and at the same
time, it can also increase the judgment accuracy of
mobile phones and other portable devices in various
situations. Higher requirements are put forward on
low computational complexity and high real-time
performance. In practice, the measurement of human
body posture through a computer is not only applied
to pedometers but also widely used in the following
scenarios.
1.1 Application of Human Body
Posture Classification
With the development of computer intelligence,
humans’ understanding of machines continues to
make breakthroughs, and the development of more
advanced human-like machines complements
accurate researches on human cognition. The human
body posture classification is an important part of
human behavior cognition. The human body posture
estimation refers to the accurate detection and
prediction of an individual’s posture (Ma et al., 2017).
It has a wide range of application scenarios and a
broad development market.
1.2 Time Series Data
In human body posture classification, the input
samples and tests are both time series data. Time
series data is a type of data collected at different times
and serves to describe changes in the phenomenon
over time. This type of data reflects the change in the
state or degree of a certain object or phenomenon over
time. With time characteristics, it can intuitively
reflect the transformations of data over time. After
storing the human body posture data as a time series,
it is easier to observe the human body posture data
that alters due to time changes in motion (Xia et al.,
2012). This kind of data is widely present in the
Huang, L., Yan, S. and Liu, J.
Research on Human Gesture Recognition Algorithm Based on Multi-Scale Sparse Neural Network.
DOI: 10.5220/0011951500003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 457-464
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
457

sensor sequence stored as time goes on. For example,
the observation and maintenance of bridges: In recent
years, extreme weather and floods have become more
frequent, and the damage caused has greatly
intensified (Nishani and Çiço, 2017). By installing
sensors in bridges, researchers can use the collected
time series and the constructed model to analyze
changes in the state of the infrastructure, effective
early maintenance, and warning measures
(Omenzetter and Brownjohn, 2006). This kind of
data will also be utilized in econometric models, such
as a country's GDP data. Through time series data,
researchers and experts can understand the trend of
GDP growth over the years.
Time series data can be divided into stationary
processes, de-trend stationary processes, and
differential stationary processes. For example, in the
steel wire manufactured by the twisting method, the
random process in which the diameter of the steel
wire does not change with the lapse of time is stable;
when the water droplets penetrate the stone, the water
droplets continuously invade the stones, and the
amount of stone reduction has an upward trend. The
statistical characteristics of time series detrending can
be obtained; annual rainfall characteristics pass trend
and seasonality, and stable rainfall characteristics
data can be obtained after differential conversion,
equating, a data set with stable mean and variance,
which is a differential stationary process.
In order to solve these problems, Multi-scale and
sparse neural networks are studied in this paper,
different from traditional algorithms for human pose
detection. Our proposed method has good
adaptability at large data scale by improving the
sparse detection ability of the network. The difference
from the existing algorithms (Golyandina, 2020;
Perraudin et al., 2017; Korenberg and Paarmann,
1991) is that the receptive field is self-adapted in the
configuration of our algorithm. The combination of
multi-scale and sparseness on the network brings a
new dimension of representation at the level of real-
time data. It shows good characteristics when the data
is collected by the nine-axis sensor mounted on the
human body.
1.3 Challenges
At present, most human posture monitoring devices
are based on the information of video images. This
method can recognize the human joint structure
through images and construct 2D or 3D bones (do
Rosário, 2014; Le and Nguyen, 2013). It has been
well applied in some fields. Based on the research
purpose of judging and classifying human posture,
this paper selects high-precision sensors to complete
data acquisition. For example, a sports Bracelet uses
a gait cycle estimation algorithm (Moe-Nilssen and
Helbostad, 2014). However, for the problem to be
solved in this paper, the traditional algorithm will
have the problem of false recognition, less
recognition of human motion state, and cannot make
effective judgments on bus travel and car travel
because it cannot distinguish the motion state. Once
when I checked my mobile phone by bus, I found that
the number of steps on the counter was increasing,
which was caused by the sensor misjudging the
bumpiness of the bus as walking. Secondly, the
existing and widely used gait cycle estimation
algorithms not only cannot achieve multi-objective
classification and judge a variety of travel patterns but
also cannot process a large number of data generated
in our research process.
At the same time, there will be some challenges
when analysing time series data. When the collected
time series data is incomplete, the trend about time
obtained by analysing this incomplete data is very
high, which may be wrong or biased. For example,
collecting the water level change of a river under the
influence of the tide, but only collecting the data in
the dry season, or the imbalance of various state data
will affect the data classification results. In the
process of this study, three kinds of sensor data,
namely three-axis accelerometer, gyroscope, and
three-axis angular velocity sensor, are used for
calculation. The amount of data is large and the
characteristics are complex. The data collected and
analyzed by the traditional algorithm cannot meet the
requirements of this study.
2 RELATED WORK
The continuous development of deep learning leads
to numerous developments and achievements in
human posture classification. At the very beginning,
machine learning played an important role. The
Support Vector Machine (SVM) (Byvatov and
Schneider, 2003) is one of the most widely used
machine learning algorithms. SVM analyses the data-
through a linear decision hyperplane. During training,
the linear decision hyperplane is trained and adjusted
in order to separate data with different labels
(Chathuramali and Rodrigo, 2012; Tharwat et al.,
2018). In the article (Chathuramali and Rodrigo,
2012), the author used images after feature extraction
as the input of SVM. As a result, the SVM is quite
computationally cost-effective and accurate in high-
dimensional vector space. K-Nearest Neighbors (K-
ISAIC 2022 - International Symposium on Automation, Information and Computing
458

NN) is another commonly used classifier. K-NN only
has one parameter k for variant how many nearby
samples will be based on for classifying the type of
the test sample, and the choice of K will have a
significant effect on the especially high dimensional
data processing (Akilandasowmya et al., 2015). In the
article (Li et al., 2012), the author applied K-NN to
human posture classification and result in high
accuracy. For the KTH dataset, the average accuracy
reaches 91.4%. Thereafter, deep learning algorithms,
as a type of more complex machine learning, are also
used in human posture classification. Back
Propagation Neuron Network (BP neuron network)
algorithm is a multi-layer feedforward network,
training with the method based on error back
propagation (Jin et al., 2000). Researchers use the
algorithm discovered by Paul (Jain and Kanhangad,
2017) to learn the features, replacing the manual
feature extraction. LeCun et al. applies the BP neuron
network to handwritten digit recognition, displaying
the possibility that BP Neuron Network can be used
in Image recognition without a complicated pre-
processing stage. Due to BP Neuron Network updates
the weighted based on the direction with the most
descent gradient of error, it is inevitable that the error
will finalize in a minimum state in a particular section
and cannot reduce to a degree that has the smallest
error (Guo et al., 2020). This is the most significant
disadvantage of the BP Neuron Network. Along with
promoting computational ability, CNN is developed
while other algorithms that combine with CNN, such
as LSTM-CNN, are also created. Before introducing
the LSTM, a discussion about RNN has to be made.
The recurrent Neural Network (RNN) is a neuron
network that is used to manage the series-changing
data. This kind of neural network can be generally
utilized in language modeling, speech recognition,
machine translation, and other applications. The Long
Shot-Term Memory (LSTM) is typically designed to
solve the problem of long-term dependency in RNN.
LSTM-CNN then combines the advantages of both
CNN and LSTM neuron networks. This neuron
network can be flexibly used in visual signal
processing that involves continuous input and output,
applying CNN for input feature extraction and LSTM
for the series prediction. The technology developed is
employed in activity recognition, image and video
description, natural language processing, and so on.
LSTM-CNN maintains a high accuracy as the result.
According to the article [21], the author applies
LSTM-CNN to human posture recognition and
acquires the percentage accuracy of 95.78%, 95.85%,
and 92.63% in the public dataset UCI-HAR, WISDM,
and OPPORTUNITY correspondingly, proving the
superiority of this type of neuron network.
3 MATERIALS AND METHODS
3.1 Data Description
To train the neuron network with human posture data,
this paper uses two public datasets and a self-
collected dataset, which both will be introduced in the
following passage. For the public dataset, WISDM
[22] and UCI-HAR [23] are selected, and both of
them include six different human postures.
Comparing to WISDM, UCI-HAR has more data-
collecting volunteers, represents the vast majority.
Although the WISDM dataset has more data
collected. The self-collected data set is based on the
nine-axis sensor, collecting the human posture data
on different transportation.
WISDM: This is an integrated and ready-to-be-
used dataset, including over one million data
collected from 36 different users. All of the data is
collected through the sensor from an Android
smartphone, which is required to be placed in a pants
pocket while doing the six following activity——
walking, jogging, going upstairs, and going
downstairs, sitting and standing. When volunteers do
these activities, the sensor collects the data in the
frequency of 20Hz and records them in time series.
The distribution of data is shown in Table 1.
Table 1: WISDM: Wireless Sensor Data Mining.
Class
Distribution
Number of
exam
p
le
percentage
Walkin
g
424,000 38.6%
Jo
gg
in
g
342,177 31.2%
Upstairs 122,869 11.2%
Downstairs 100,427 9.1%
Sittin
g
59,939 5.5%
Standin
g
48,395 4.4%
UCI-HAR: This dataset is collected from thirty
volunteers aged between 19~48 years old, and each
of them placed the phone at their waist while carrying
out six daily activities similar to WISDM, namely
walking, going upstairs, going downstairs, sitting,
standing, and lying down. The distribution is shown
in Table 2. With the sensor inside the phone, the
three-axis acceleration and three-axis angular speed
are collected at a frequency of 50Hz. After data
collection, the researchers denoise the data and label
them accordingly to the video recorded during the
collection process, then separate them into two
Research on Human Gesture Recognition Algorithm Based on Multi-Scale Sparse Neural Network
459
groups. 70% of the data goes into the training set and
the rest 30% is in the testing set.
Table 2: UCI-HAR: Human Activity Recognition database
Class
Distribution
Number of
exam
p
le
percentage
Walkin
g
122,091
16.3%
Walking-
upstairs
116,707
15.6%
Walking-
downstairs
107,961
14.4%
Sittin
g
138,105
16.9%
Standin
g
136,865
18.5%
La
y
in
g
136,865
18.3%
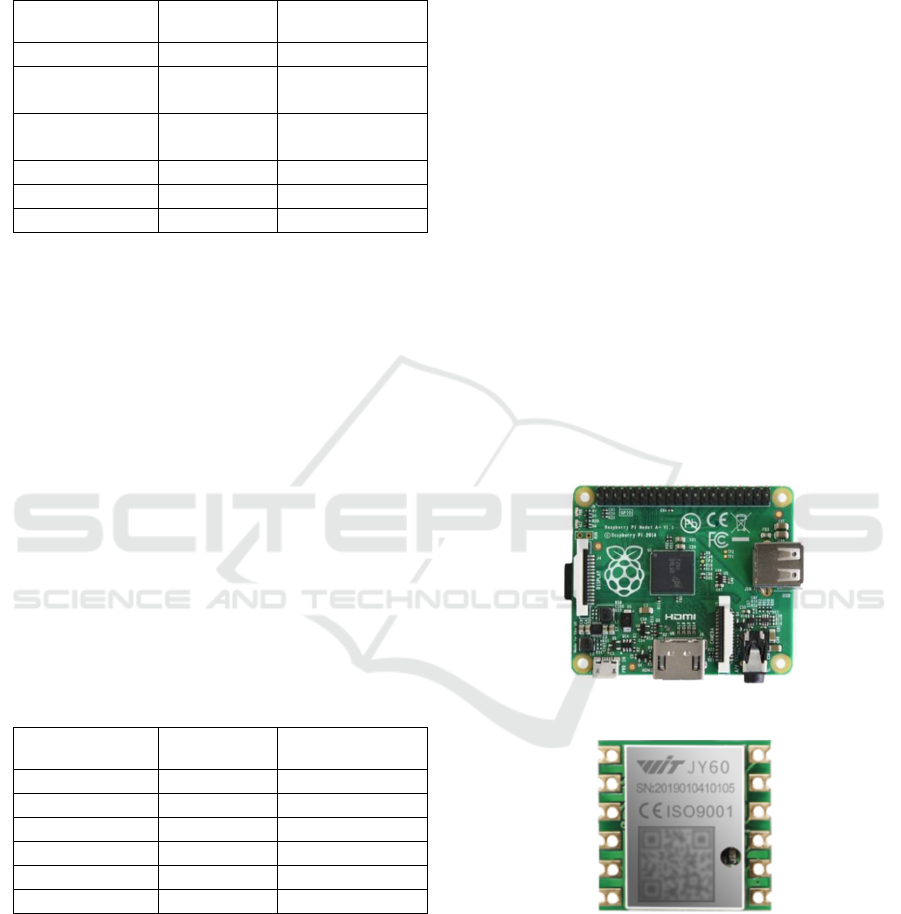
Self-collected dataset: While collecting the data,
Raspberry Pi with a nine-axis sensor is used.
Comparing to the sensor in the smartphone,
Raspberry Pi (Figure 1) can carry out a wider range
of sensors (Figure 2) that can be customized, resulting
in the availability of more types of data. The
Raspberry Pi was placed in the pants pocket, where
the smartphones are usually placed, to collect the data
that has similar features to the one which the phone
will collect. The types of data collected are x, y, z,
three-axis acceleration, angular speed, and gyro
value, a total of nine types of data, collecting at the
frequency of 20Hz. During the data collection, six
modes of traveling are chosen, which are walking,
running, cycling, bus, metro, and car. Each activity
lasts for around one hour to collect complete sets of
data. The distribution of the self-collected dataset is
quite even, listing in Table 3.
Table 3:
Self-collected dataset.
Class
Distribution
Number of
example
percentage
Walkin
g
89349
17.4%
Runnin
g
74098
14.5%
C
y
clin
g
90187
17.6%
B
y
bus
60982
11.9%
B
y
subwa
y
87623
17.1%
B
y
ca
r
108761
21.3%
3.2 Data Preprocessing
In the data collected, there will usually be some
anomalies and missing values, which will affect the
training of the model. To get the best result of
network training, data need to go through pre-
processing ensuring that the anomalies are removed
and the missing values are replenished, which is
especially important for the self-collected data. This
paper did the following data pre-processing:
Data Normalization: Normalization is the process
of reaching the minimal redundancy that is integral to
structure the data. Generally speaking, the dataset will
be divided into several groups, and the relationship
between groups will be defined. In that case,
modification and deletion of one single group will be
spread to others with a defined relationship. When a
relational database has a higher normal form, it will
have a higher resistance to anomalies and be
convenient to process.
Missing Value Processing: Since the time series
data is used in various fields, it is inevitable that some
of the data will be lost during the transmission. These
missing data will affect the overall effectiveness of
network training. There are two mainstream missing
value processing methods. The first one is refilling
data based on the statistic pattern. A researcher refill
by last, mode, or mean. The second one is deleting the
group of samples that miss the value. In the self-
collected dataset, the missing value is caused by the
deletion of anomalies. Filling in the missing value is
one of the works done in this paper through the mean
of the previous and the next data.
Figure 1: Raspberry Pie Chip.
Figure 2: Nine-axis Sensor.
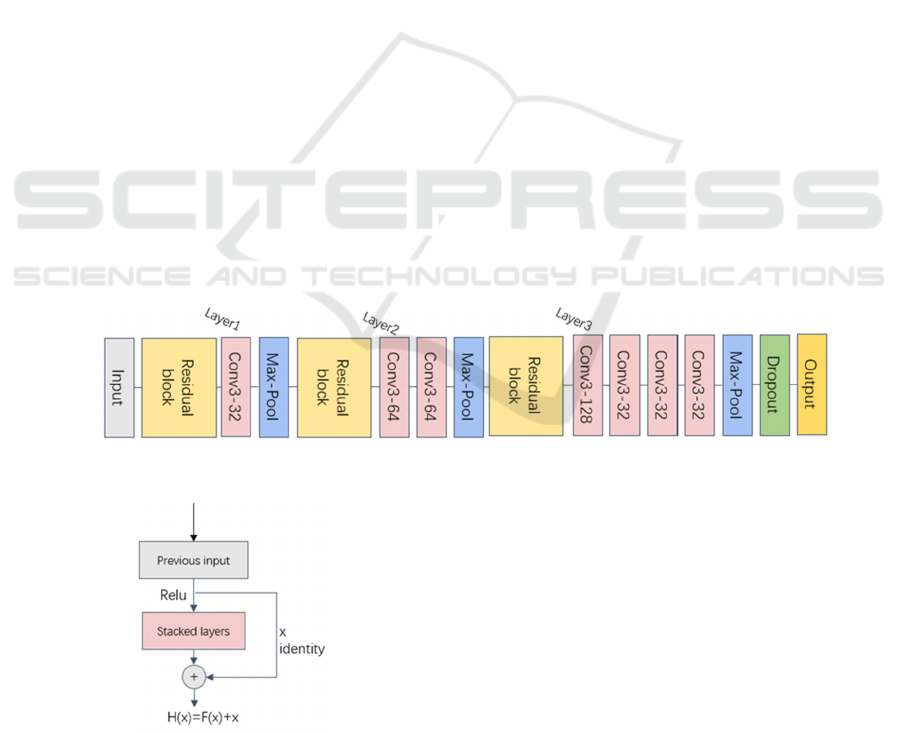
3.3 Network Structure
A neural network architecture (Figure 3) is designed
in this paper and, in particular, is added to a simple
and efficient residual processing pipeline. Different
from the existing methods to improve the feature
capture accuracy, the method we propose can capture
ISAIC 2022 - International Symposium on Automation, Information and Computing
460
the dependency information well in a limited level.
Compared with [24], [25], [26], the defect is solved
in handling timing problem in CNN.
Residual network is widely used in deep neural
network, it can solve the problem of gradient
disappearance and gradient explosion caused by too
many layers (Guo et al., 2020). Expanding the
receptive field of a neural node generally increases
progressively using the inflation rate. Expanding the
receptive field of neural nodes generally increases the
use of the expansion rate progressively, the network
depth will increase accordingly, and the stability of
the network will be enhanced due to the introduction
of residual connections. Figure 4 shows the residual
structure used in this paper, including the output of 𝙁
and the identity map 𝙓 in its final output 𝐎.
𝑜𝜎𝐹
𝑥
𝑥
(1)
A human pose classification model is established
for long-term sparse sequence signals. In this paper,
the three-level residual network structure is stacked to
increase the network receptive field, and the structure
is more stable in this network. The sequence
dimension is 800*1, which is the input dimension of
this network input. After sufficient experiments, the
filter uses 5*1 and the sliding step size in the
convolutional layer is 1. The filter is set to 32 and 64
in the pre- and post-stage filters. It can be seen that
the larger receptive field greatly reduces the
computational cost compared to the traditional CNN
network in a small number of base-level networks
through the stacked network. At the same time, it has
good feature information capture ability in longer
sensor time series.
4 EXPERIMENT RESULT
We implemented our model with the TensorFlow
framework. Make a comparison with different
algorithms on different datasets. Validate the
effectiveness of the network by validating
experiments, evaluating and analyzing the results on
our own datasets. Finally, the confusion matrix is
obtained on the training set, validation set, test set and
the total classification results on different datasets.
Differences In terms of different data sets, the
public data sets are all collected from the real
environment, but the obvious data differences are
reflected in the sample types and action
characteristics. The parts that are easily confused
between different actions are more obvious in the
sparse features in the own data set. There is a clear
difference in the sparse feature representation using
the residual network structure in Figure 4, and the
results of processing these data are shown in Figures
5, 6, and 7. The experimental results show that the
algorithm in this paper shows good performance in
the public data sets WISDM and UCI-HAR, and the
performance is excellent in the own datasets.
Figure 3: network architecture.
Figure 4: Details of the residual block.
Comparison between different algorithms,
LSTM-CNN, CNN, SVM, J48, and multilayer
perceptron were used to compute the same data.
Accuracy and training time are the detection criteria,
as shown in Table 4. It can be seen that the accuracy
rate has been improved using the method in this paper
compared with other algorithms. Exhibits larger gaps
using these algorithms on own datasets due to larger
data size and smaller class gaps.
Research on Human Gesture Recognition Algorithm Based on Multi-Scale Sparse Neural Network
461

Figure 5: The confusion matrix uses the WISDM dataset on the algorithm in this paper(The abscissa is the target classification
and the ordinate is the output classification)
Figure 6: The confusion matrix uses the UCI-HAR dataset on the algorithm in this paper(The abscissa is the target
classification and the ordinate is the output classification)
Figure 7: The confusion matrix uses the Self-collected dataset on the algorithm in this paper(The abscissa is the target
classification and the ordinate is the output classification)
ISAIC 2022 - International Symposium on Automation, Information and Computing
462
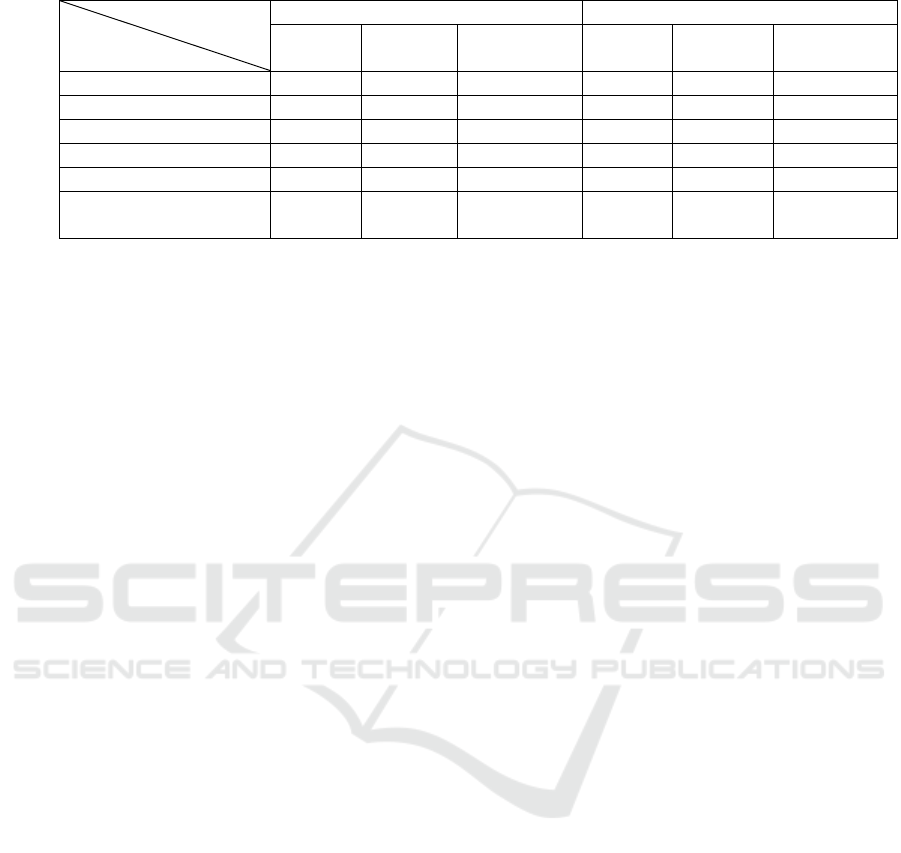
Table 4: Comparison of accuracy recognition and training time between this algorithm and other algorithms
datasets
Model
Reco
g
nition Accurac
y
/% Trainin
g
time/s
WISDM UCI-
HAR
Self-
collected
WISDM UCI-
HAR
Self-
collected
LSTM-CNN 90.2 92.4 86.5 14.253 15.3635 19.461
J48 81.1 85.1 79.6 10.263 9.683 11.254
multila
y
er perceptron 88.3 91.7 82.6 11.322 10.256 12.364
SVM 87.6 91.9 84.5 9.651 7.229 10.251
CNN 90.6 91.2 85.7 20.356 13.529 16.321
The algorithm of this
p
ape
r
96.3 93.33 97.42 7.586 6.241 8.254
5 CONCLUSION
To solve the above problems, as well as multi-object
classification, multi-dimensional data processing, and
accurate half-segment results, the following work is
done.
(1)All kinds of data are collected and
preprocessed. In the collection process, the collection
time of each sample is controlled in an interval greater
than one hour to ensure the integrity of the data, and
to reduce the proportion of the overall data when
abnormal data occurs, thereby reducing its impact on
the data set. In the preprocessing, the data is
standardized and missing values are processed.
(2)A deep multi-scale neural network is proposed
as our algorithm, and the fast and accurate extraction
of data features in low signal-to-noise ratio data is the
advantage of this algorithm. Find a balance between
high resolution and high real-time through different
receptive fields. Reasonable use of pooling and up-
sampling techniques can improve performance while
reducing the amount of computation. The receptive
field changes continuously during the calculation
process in the blocks between layers, so as to achieve
the purpose of capturing local features in a large
amount of data.
(3) Use the public data set as input to test this
model, because the public data set has the
characteristics of large quantity, standard collection,
and is often used, so it has a high degree of reference
when testing the model. In addition, the model has
achieved high accuracy in multiple public data sets,
which proves that the model has sufficient versatility.
(4) Comparing the results obtained by running
multiple public data sets of this model with the results
obtained by various existing models, a higher
accuracy has been achieved, which proves the
practical application value of this model.
Based on real-life problems, this research built a
sensor collection device to process relevant data.
Carrying out network model research and
experiments based on CNN and LSTM-CNN
networks and other, and verify network models based
on WISDM and UCI-HAR data sets, and elaborate
and demonstrate in the papers respectively to realize
human posture detection and classification. This
produces the intelligent recognition of different
transportation vehicles when going home in real life.
In this process, a large number of documents were
investigated, the world-class research methods were
summarized, and scientific research capabilities were
exercised.
REFERENCES
Nweke, Henry Friday, et al. 2018. Deep Learning
Algorithms for Human Activity Recognition Using
Mobile and Wearable Sensor Networks: State of the Art
and Research Challenges. Expert Systems with
Applications, pages. 233–261.
Dirac G, Leone A, Siciliano P. 2013. Human posture
recognition with a time-of-flight 3D sensor for in-home
applications. Expert Systems with Applications, 40(2):
744-751.
Ma C, Li W, Gravina R, et al. 2017. Posture detection based
on smart cushion for wheelchair users. Sensors, 17(4):
719.
Xia L, Chen C C, Aggarwal J K. 2012. View invariant
human action recognition using histograms of 3d joints.
2012 IEEE computer society conference on computer
vision and pattern recognition workshops. pages 20-27.
Nishani E, Çiço B. 2017. Computer vision approaches
based on deep learning and neural networks: Deep
neural networks for video analysis of human pose
estimation. 2017 6th Mediterranean Conference on
Embedded Computing (MECO). page 1-4.
Omenzetter P, Brownjohn J M W. 2006. Application of
time series analysis for bridge monitoring. Smart
Materials and Structures, 15(1): 129.
Golyandina N. 2020. Particularities and commonalities of
singular spectrum analysis as a method of time series
Research on Human Gesture Recognition Algorithm Based on Multi-Scale Sparse Neural Network
463

analysis and signal processing. Wiley Interdisciplinary
Reviews: Computational Statistics, 12(4): e1487.
Grassi F, Loukas A, Perraudin N, et al. 2017. A time-vertex
signal processing framework: Scalable processing and
meaningful representations for time-series on graphs.
IEEE Transactions on Signal Processing, 66(3): 817-
829.
Korenberg M J, Paarmann L D. 1991. Orthogonal
approaches to time-series analysis and system
identification. IEEE Signal Processing Magazine, 8(3):
29-43.
do Rosário J L P. 2014. Photographic analysis of human
posture: a literature review. Journal of bodywork and
movement therapies, 18(1): 56-61.
Le T L, Nguyen M Q. 2013. Human posture recognition
using human skeleton provided by Kinect. 2013
international conference on computing, management
and telecommunications. pages: 340-345.
Moe-Nilssen R, Helbostad J L. 2014. Estimation of gait
cycle characteristics by trunk accelerometry. Journal of
biomechanics, 37(1): 121-126.
Byvatov E, Schneider G. 2003. Support vector machine
applications in bioinformatics. Applied bioinformatics,
2(2): 67-77.
Chathuramali K G M, Rodrigo R. 2012. Faster human
activity recognition with SVM. International
conference on advances in ICT for emerging regions
pages: 197-203.
Tharwat A, Mahdi H, Elhoseny M, et al. 2018. Recognizing
human activity in mobile crowdsensing environment
using optimized k-NN algorithm. Expert Systems with
Applications, 107: 32-44.
Akilandasowmya G, Sathiya P, AnandhaKumar P. 2015.
Human action analysis using K-NN classifier. 2015
Seventh international conference on advanced
computing. pages: 1-7.
Li J, Cheng J, Shi J, et al. 2012. Brief introduction of back
propagation (BP) neural network algorithm and its
improvement. Advances in computer science and
information engineering. Heidelberg, pages: 553-558.
Jin W, Li Z J, Wei L S, et al. 2000. The improvements of
BP neural network learning algorithm. WCC 2000-
ICSP 2000. 2000 5th international conference on signal
processing proceedings. 3: 1647-1649.
Jain A, Kanhangad V. 2017. Human activity classification
in smartphones using accelerometer and gyroscope
sensors. IEEE Sensors Journal, 18(3): 1169-1177.
Guo C, Fan B, Zhang Q, et al. 2020. Augfpn: Improving
multi-scale feature learning for object detection.
Proceedings of the IEEE/CVF conference on computer
vision and pattern recognition. pages: 12595-12604.
ISAIC 2022 - International Symposium on Automation, Information and Computing
464
