
KHAOS Improvements Using BSpline
J
´
er
ˆ
ome Truc
a
, Daniel Sidobre
b
and Rachid Alami
c
LAAS-CNRS, Universit
´
e de Toulouse, CNRS, UPS, Toulouse, France
Keywords:
Human-Robot Interaction, Trajectory Planning, Autonomous Aerial Manipulators.
Abstract:
The introduction of BSpline to generate the trajectories for a Kinematic Human Aware Optimization-based
System for Reactive Planning of a Flying-Coworker, a multi-rotor drone that collaborates with workers to
fetch small objects, is presented. This allows to improve the quality of the motions and helps to better respect
the constraints relative to the collaboration with a human.
1 INTRODUCTION
In our previous work, we presented KHAOS
(Truc et al., 2022), a Kinematic Human Aware
Optimization-based System for Reactive Planning of
Flying-Coworker in the context of the ”Flying Co-
Worker” project: a multi-rotor drone that collaborates
with workers to fetch small objects. The robot must
fly in a human-populated area, where only a hand-
ful of human workers may be “aware” of the robot’s
current task and mission, and a fraction of them may
be involved in the physical interaction (e.g., object
delivery): the robot must assume that most humans
are “observers”, i.e., they ignore its current mission
and are not involved with it. In such conditions, the
drone needs to carefully plan its 3D motion in a reac-
tive way to navigate and act safely in close proxim-
ity to humans. Beyond safety, the drone should aim
at exhibiting navigation strategies that are, as much
as possible, socially aware: for example, it should
avoid fast movements that could scare the observers;
it should maximize its visibility (Sisbot et al., 2007)
for workers, especially when engaging in an interac-
tion. To address the navigation requirements men-
tioned above, we proposed KHAOS for reactive plan-
ning, which produces trajectories in the 3D space sat-
isfying the kinematic constraints of the drone and en-
suring the visibility and ease of the humans present in
the environment. The human-aware behavior is real-
ized by proposing a visibility cost and a novel discom-
fort cost and including these along with the kinematic
constraints into a stochastic optimization process in-
a
https://orcid.org/0000-0002-2244-3385
b
https://orcid.org/0000-0002-5564-2735
c
https://orcid.org/0000-0002-9558-8163
spired by the STOMP algorithm (Kalakrishnan et al.,
2011).
In this paper, we first show the benefits of an
extension of Softmotion (Sidobre and Desormeaux,
2019) using BSpline as input to KHAOS to smooth
the initial path. Then, in two different scenarios, we
show the interest of using BSpline to improve the tra-
jectories generated by KHAOS and to ensure that they
are feasible.
2 INITIAL PATH SMOOTHING
STOMP algorithm optimize an initial path from a
set of costs to generate a new smoothed path. This
smoothing is dependent on the initial path, indeed
STOMP does not allow to smooth the too important
breaks of the initial path. These breaks will remain in
the final result and may even be amplified. By inher-
itance, KHAOS suffers from the same problem and
thus requires smoothing the initial input path in order
to obtain a satisfactory output. Moreover, it gener-
ates a 3D trajectory constrained by kinematic limits
(bounded velocity, acceleration and jerk) and human-
aware costs that can also have an impact on the kine-
matic parameters. This trajectory must therefore re-
spect the feasibility from a kinematic point of view
by avoiding, for example, too sharp turns that would
force the robot to slow down during execution.
To this end, we propose the use of the SoftMo-
tion library and in particular an extension of the well
known Non Uniform B-Spline (Piegl and Tiller, 1996;
Rousseau, 2019) to generate feasible trajectories from
a list of waypoints. The main advantage of this ex-
tension is to allow the control of the kinematic pa-
Truc, J., Sidobre, D. and Alami, R.
KHAOS Improvements Using BSpline.
DOI: 10.5220/0011957000003622
In Proceedings of the 1st International Conference on Cognitive Aircraft Systems (ICCAS 2022), pages 43-46
ISBN: 978-989-758-657-6
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
43
rameters at the beginning and at the end of the trajec-
tory, which is necessary to ensure continuity between
consecutive trajectories generated by two successive
plannings. Many planners such as PRM or RRT al-
low to generate an initial path connecting a start point
and an end point. Between each waypoint composing
this initial path, we have segments that by nature do
not allow to respect a continuity. The use of BSpline
will allow to generate a smooth trajectory from this
list of waypoints even when they are numerous and
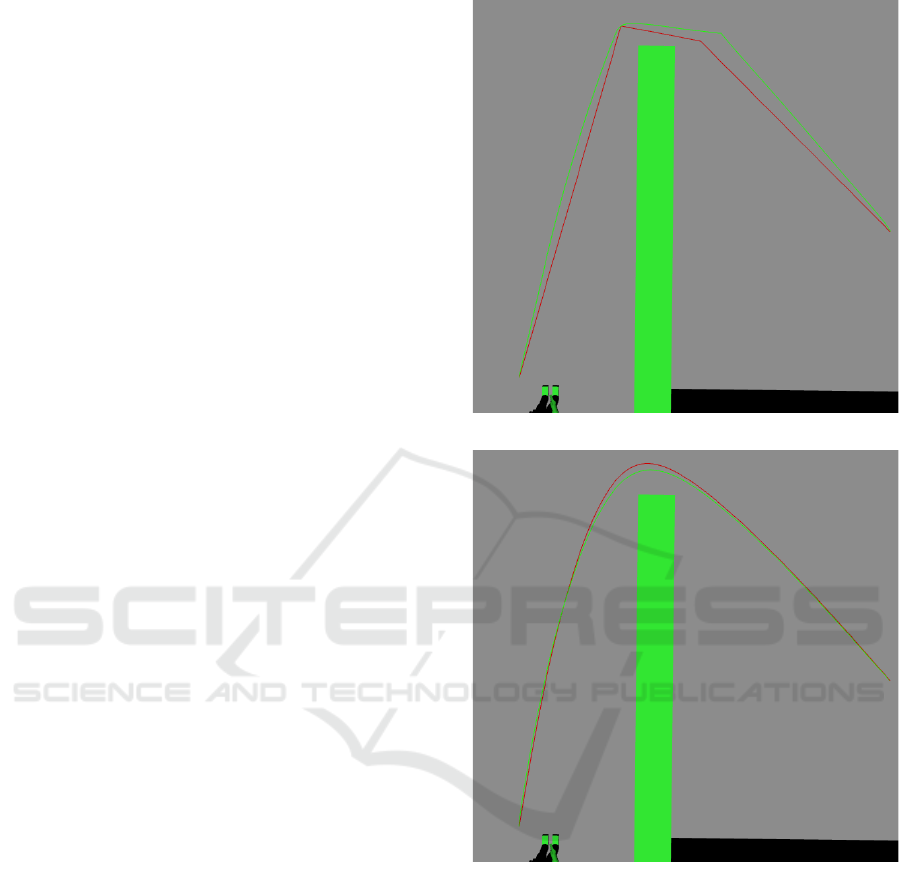
very close. In Fig.1, We compare the outputs of the
standard version of KHAOS when no smoothing is
applied (Fig.1a) and when a B-Spline is used (Fig.1b).
When no smoothing is performed, we show that even
after many iterations, the continuity defects present in
the initial path are transmitted to the KHAOS result.
On the other hand, when using B-Spline, we can ob-
serve that the trajectory generated by KHAOS is very
smooth too. This allows our algorithm to start on a
good basis and will facilitate the optimization phase
because naturally the continuity will be respected.
3 KINEMATIC COMPLIANCE
In addition to smoothing and giving a harmonious
shape to the trajectory, this SoftMotion extension al-
lows, from the list of waypoints from KHAOS, to en-
sure continuity from a kinematic point of view but
also to respect the human-aware constraints. Indeed,
KHAOS provides the position and speed for each
waypoint according to constraints adapted to humans
in the environment but also considering the kinematic
limits of the drone. For example, if the drone starts far
enough from any human and outside its visual field,
it will accelerate to its maximum speed at maximum
acceleration (Fig.2 between 0 s and 2 s). When it is
close enough to a human, the human-aware costs will
become important. When approaching a human, for
a handover for example, the drone will undergo a de-
celeration (Fig.2 between 8 s and 14 s) dictated by the
human-aware costs but KHAOS also verifies that this
deceleration is achievable by the drone considering its
deceleration limits. If it is not feasible from the kine-
matic limits point of view, KHAOS will generate a
trajectory where the drone will slow down earlier so
that it is feasible and that the human-aware constraints
are also respected.
We wish that between each of these waypoints
(segments), the respect of these constraints is ensured.
For example, in order not to cause too much discom-
fort to humans in the environment, KHAOS makes
sure, among other things, to limit the speed accord-
ing to the distance to the human. It is therefore neces-
(a) Standard KHAOS.
(b) KHAOS using BSpline.
Figure 1: Shapes of the initial path (red) and trajectory gen-
erated by KHAOS (green) after several iterations for two
cases: a) when no smoothing is applied to the initial path
and b) when BSpline are used to smooth.
sary to be sure that between two positions provided by
KHAOS, the speed along the segment is in agreement
with the speeds given at each of these two positions.
If we look for example at the KHAOS curve not us-
ing BSpline (Fig.2 in green), we notice around 1.8 s
and 8 s, sharp changes if we consider simple line seg-
ments connecting the waypoints. These defects are
corrected by using the BSpline (Fig.2 in orange), al-
lowing on the one hand to ensure that it is physically
feasible by the drone, but especially to obtain a more
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
44
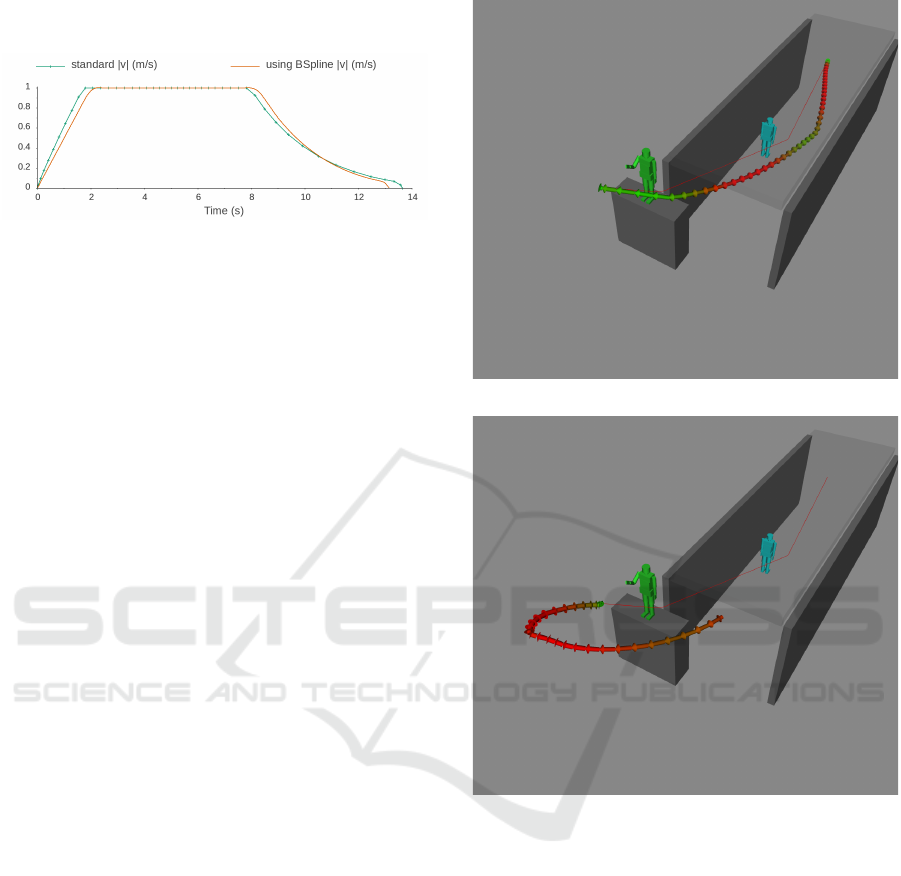
fluid movement and therefore less uncomfortable for
the human present in the vicinity.
Figure 2: Magnitude of the drone’s speed before (green)
and after (orange) using BSpline in the KHAOS output in
the scenario where the drone approaches a human from the
front in a straight line.
The time bases do not match between the two curves be-
cause the calculation of the times is different between the
calculation of the waypoints and SoftMotion.
4 TWO HUMANS
We take the example of the corridor with two hu-
mans presented in our previous paper (Truc et al.,
2022). The objective for the drone is to navigate from
one end of the corridor (Fig.3a), pass the human in
blue, then arrive from the back of the human in green
(Fig.3b) in order to position itself in front of him as if
it wanted to exchange an object with him. We show
in Fig.4, the magnitude speed profile along the trajec-
tory actually executed by the drone by concatenating
the trajectory portions generated at each iteration of
KHAOS. Indeed, another advantage of our SoftMo-
tion extension, is to generate trajectories from a non-
zero speed and acceleration set-point needed as input
by KHAOS in a reactive planning context. In the situ-
ation presented here, the human-aware constraints as
well as the environment of the corridor constrains the
trajectory of the drone, forcing it to pass close to the
human in blue and thus reduce its speed (Fig.4 be-
tween 3 s and 13 s), once out of the influence of the
first human, it can accelerate again. Once it gets close
enough and in the back of the human in green, it must
slow down again (Fig.4 between 15 s and 20 s) and
turn around the human to appears in the human vi-
sual field before finishing its approach. We can notice
how the speed profile is smoothed when the drone ap-
proaches the speed limit, or when it has to make a
sharp turn (around 20 s).
5 CONCLUSIONS
The use of BSpline is a real gain for KHAOS, allow-
ing our algorithm to propose more realistic trajecto-
(a) Start trajectory.
(b) Later trajectory.
Figure 3: Trajectory execution in a two-humans scenario.
a) First trajectory generated by KHAOS, the drone starts by
navigating in the corridor. b) A few iterations later, after
passing the blue human in the corridor. Red line: represents
initial path before smoothing using BSpline. Red arrows:
highest speed magnitude. Green arrows: lowest speed mag-
nitude.
ries that can be directly used by a basic controller.
As we have shown, this makes it possible to improve
the initial path at the input of KHAOS and also to en-
sure to provide at the output a trajectory achievable by
the drone and respecting the human-aware constraints
even better. From the human-aware point of view, it
also improves the behavior of the drone whose move-
ments are more fluid and cause even less discomfort
than with the standard version. We also presented in
our scenario with two humans, the final result of a tra-
KHAOS Improvements Using BSpline
45
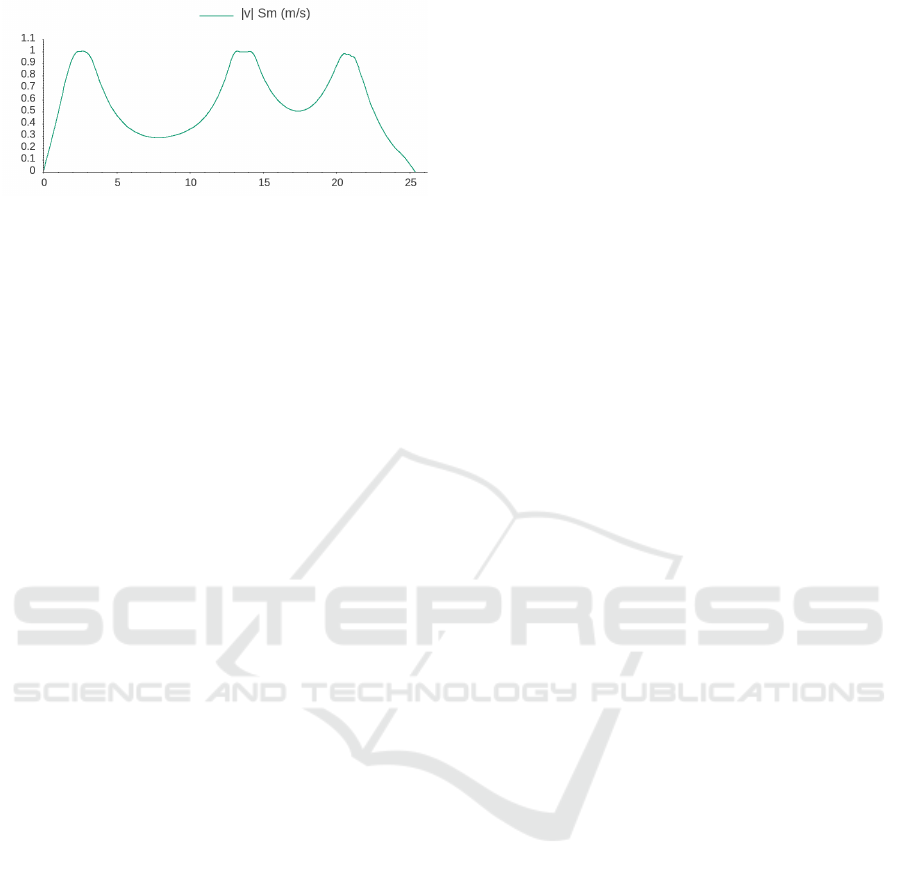
Figure 4: Magnitude of the drone’s speed using BSpline
composed of many iterations of KHAOS in the scenario
with two humans.
jectory executed by the drone and composed of many
iterations of KHAOS, showing the ability of our Soft-
motion extension to generate BSpline resuming the
non-zero speed and acceleration set point of the previ-
ous iterations. In the near future, we want to improve
this extension of SoftMotion by adding an optimiza-
tion step to further refine the kinematic parameters.
Also, we plan to explore the possibility of implement-
ing the use of BSpline directly in the core of KHAOS,
in order to work directly on feasible trajectories at the
optimization level.
ACKNOWLEDGMENTS
This work was partially supported by the French Na-
tional Research Agency (ANR) (project The Flying
Co-Worker, grant ANR-18-CE33-0001), the Euro-
pean Commission (AnDy, GA. n. 731540; CHIST-
ERA - HEAP) and the Artificial and Natural Intelli-
gence Toulouse Institute - Institut 3iA (ANITI) under
grant agreement No: ANR-19-PI3A-0004.
REFERENCES
Kalakrishnan, M., Chitta, S., Theodorou, E., Pastor, P., and
Schaal, S. (2011). STOMP: Stochastic trajectory opti-
mization for motion planning. In 2011 IEEE Interna-
tional Conference on Robotics and Automation, pages
4569–4574, Shanghai, China. IEEE.
Piegl, L. and Tiller, W. (1996). The NURBS book. Springer
Science & Business Media.
Rousseau, G. (2019). Optimal trajectory planning and pre-
dictive control for cinematographic flight plans with
quadrotors. PhD thesis, Universit
´
e Paris-Saclay.
Sidobre, D. and Desormeaux, K. (2019). Smooth cubic
polynomial trajectories for human-robot interactions.
Journal of Intelligent & Robotic Systems, 95(3):851–
869.
Sisbot, E., Marin-Urias, L., Alami, R., and Simeon, T.
(2007). A Human Aware Mobile Robot Motion Plan-
ner. IEEE Transactions on Robotics, 23(5):874–883.
Truc, J., Singamaneni, P.-T., Sidobre, D., Ivaldi, S., and
Alami, R. (2022). Khaos: a kinematic human aware
optimization-based system for reactive planning of
flying-coworker. In ICRA 2022.
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
46
