
Make Automation G.R.E.A.T (Again)
Julien Donnot
1
, Daniel Hauret
2
, Vincent Tardan
1
and Jérôme Ranc
1
1
French Air Warfare Center, 1061 Avenue du Colonel Rozanoff, Mont-de-Marsan, France
2
Thales AVS, 75-77 Avenue Marcel Dassault, Mérignac, France
Keywords: Military, Aviation, Artificial Intelligence, Ergonomics, Autonomy.
Abstract: Integration of Artificial Intelligence Based Systems in current and future Fighter aircrafts has begun. More
than automation, these systems provide autonomy that will certainly imply changes in fighter pilots cognitive
activity. The current study aimed to test a methodology conceived for the production of ergonomic guidelines.
We collected data related to the use of a path solver with fighter pilots by assessing trust calibration in AIBS.
Analysis of under and overtrust situation led us to formulate relevant ergonomic principles for the tested AIBS
but relevant too for different AIBS.
1 INTRODUCTION
The objective of the current work was to test a method
designed for the evaluation of human trust behaviors
in Artificial Intelligence Based System (AIBS). The
French Air Force needs to develop the capability to
evaluate usability of AIBS employed on board of a
fighter aircraft. Trust in autonomy can be considered
as a key factor for usability. As French Air Force has
to be prepared for forthcoming conflicts, conception
of future air combat systems implies to anticipate
ergonomics issues, especially in terms of decision-
making, workload and errors in fighter aircraft
cockpits. In the field of prospective ergonomics
(Robert & Brangier, 2009), Brangier and Robert
(2014) point out the difficulty to represent future
activity related to a system that does not yet exist.
Considering that the main characteristic of future
fighter aircrafts will be the obligation for pilots to
collaborate with an AIBS (Lyons, Sycara, Lewis &
Capiola, 2021), there is a real need to think up this
future collaborating activity.
Lyons et al. (2018) warned about the specificity
of trust in future autonomy, including AIBS, in the
field of military aviation. Leading studies with real
operators, with real tools and real consequences (R3
concept) appears as the most relevant. In the field of
military aviation, real operators are fighter pilots, real
tools are fighter aircraft (Rafale) and real
consequences appear in a tactical environment. Too
few studies reported knowledge about the French
fighter pilot activity. Amalberti (1996) touched on
some specific features of this activity, Guérin,
Chauvin, Leroy, and Coppin (2013) adapted a
Hierarchical Task Analysis method to one air operation
and Hauret (2010) was the first to be interested in pilot
collaboration with an artificial agent.
To define what would be the collaborating activity
in a future fighter cockpit, ergonomists need to assure
usability of human machine interfaces. Bastien and
Scapin (1995) described a set of criteria designed for
conception guidance. These guidelines were thought
to conceive human-computer interfaces. Given that
functions performed by AIBS are and will be more
complex and sometimes innovative, AIBS conception
guidelines deserve to be considered. In the current
study, authors focused on trust as a critical factor for
usability of AIBS on board a fighter aircraft. Then,
the objective of the study was to produce conception
guidelines to increase usability by building pilot’s
trust in AIBS.
Trust is a complex concept depending on
individual, organizational and cultural context (Lee &
See, 2004) but we choose to focus on its calibration
in the current study by considering the lack and the
excess of trust in a specific AIBS. A large number of
methods and metrics can drive analysis of trust levels
(Hoff & Bashir, 2015). In order to assess usability in
relation with trust, pilots’ behaviors prevailed over
pilots’ feelings. Therefore, we develop a method
immersing operational fighter pilots in a simulated
combat air mission with an operating AIBS.
Experimental objectives were 1) to identify causes of
observed trust levels leading to understand pilots uses
92
Donnot, J., Hauret, D., Tardan, V. and Ranc, J.
Make Automation G.R.E.A.T (Again).
DOI: 10.5220/0011984300003622
In Proceedings of the 1st International Conference on Cognitive Aircraft Systems (ICCAS 2022), pages 92-95
ISBN: 978-989-758-657-6
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
of the AIBS and 2) to formulate ergonomics
principles justified by trust issues.
2 METHODOLOGY
2.1 Participants
Four military pilots were tested. All the pilots were
experimented on Mirage 2000 and familiar with
aircraft simulator.
2.2 Apparatus
Participants were asked to perform a flight as an
operational mission on a Mirage 2000 simulator.
Mission was built and played on DCS world®.
Functions of the AIBS PathOptim® were integrated
into a Tacview® interface.
The mission demands each pilot to cross a hostile
territory to bomb a target on time and to come back
safe. Pilots had to respect several restrictions like a
maximal height of 10kft, no detection by enemy radar
and no engagement by enemy air defense systems.
Flying over 10kft for the first time made an enemy
fighter aircraft took off for interception and raised
mission difficulty.
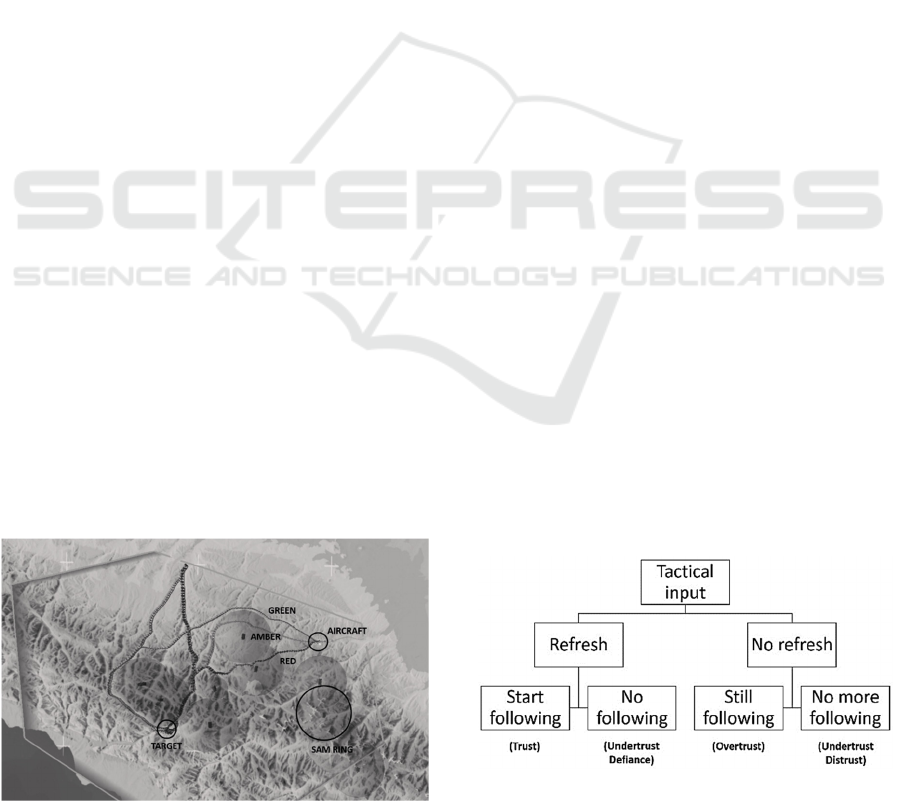
2.3 The AIBS
PathOptim is a 3D track solver based on the Genetic
Fuzzy Trees method, which gives to the pilot the
choice of three types of track to reach the target as fast
as possible. By integrating characteristics of enemy
air defense systems, each track is calculated for a
fixed minimal height without overflying 10kft at a
fixed speed. Green tracks avoid as much as possible
to enter in SAM ring, red tracks are the fastest tracks
even if the pilot must enter in one or several SAM
rings and amber tracks are a compromise between
survival and fastness (Figure 1).
Figure 1: PathOptim in the tactical display.
2.4 Scenario
During the mission, some new air defense threats
appear if the pilot enters in the triggering area. Events
could be SAM appearance, SAM disappearance and
a new threat not considered by PathOptim (soldiers
with Rocket Launchers - RPG). Pilots were informed
of PathOptim limitations. Events were built to force
pilots to use PathOptim. As a control condition and
the only exception, the threat by soldiers with RPG,
was created to confirm that pilots were aware of the
uselessness of PathOptim is this specific situation.
Pilots must react as following: Refresh
PathOptim, choose a track and follow the track. Trust
coding results from the combination of the possible
behaviors produced by pilots (Figure 2). Pilots could
use PathOptim at any time even if no tactical change
pops up.
The experiment setup was designed to deduce
trust, undertrust and overtrust from PathOptim uses
by pilots.
2.5 Data Analysis
Each planned events and each supplementary use of
PathOptim were analysed. Analysis consisted in
replaying the mission. Tactical situation, aircraft
spatial localization, pilots/cockpit interactions,
pilots/PathOptim interactions, eye-tracking and radio
communications were analyzed to understand pilots’
behaviors. The workload was monitored according to
the dual-task paradigm. Pilots had to add a triplet of
digits and give the total. Data were analyzed in terms
of accuracy and delay in seconds.
Trust was observed when pilots used PathOptim
and that PathOptim was helpful (Figure 2). With
understrust, the pilot did not use it whereas
PathOptim was helpful. In undertrust we
distinguished defiance and distrust. With defiance,
the pilot refreshed PathOptim but did not follow a
proposed path and in distrust, the pilot did not refresh
PathOptim nor followed a virtual path. In overtrust,
Figure 2: Hierarchical action tree and corresponding trust
levels.
Make Automation G.R.E.A.T (Again)
93

the pilot did not refresh PathOptim although he
needed to do it. Another overtrust situation was when
the pilot refreshed PathOptim whereas it would not be
useful (i.e., soldiers with RPG not detected by
PathOptim).
3 FINDINGS AND DISCUSSION
3.1 General Results
All the pilots achieved the mission successfully by
bombing the target and without being killed by enemy
air defense.
3.2 Trust Calibration
Pilots followed a path proposed by PathOptim
between 62% and 73% of the flying time. The number
of PathOptim utilizations varied according to the
pilots and produced from six to thirteen events. Trust
represented from 33% to 82% of trust levels against
undertrust and overtrust. Trust tends to increase with
number of events and therefore with uses.
Regarding the workload, high delays can be
explained by enemy’s aircraft monitoring, integration
of new events in the situational awareness and path
following.
Qualitative analysis led to identify effects and
causes for each event generating undertrust or
overtrust. Thus, ergonomists produced requirements
for PathOptim development. Based on these
requirements, ergonomic principles have been
formulated.
3.3 G.R.E.A.T Principles
3.3.1 G for Guidance
The pilot needs the necessary information to follow
the tracks proposed by PathOptim, so AIBS must
carry out tasks helping the proposal execution (ex:
diving tight curve) to reduce flying errors from the
pilot.
3.3.2 R for Recommendation and Realism
Recommendation: The pilot needs information on the
currently best use of the system, so AIBS must be able
to detect inappropriate use by the pilot (ex: no green
path because amber path was forced) to make use of
the full system capabilities.
Realism: The AIBS has to treat environmental factors
responsible for an effect on security or performance
to gain trust with a well-fitting proposal (ex: flying in
the valley instead of above hills).
3.3.3 E for Margin of Error
The pilot needs to be aware of the margin allowed for
execution of the AIBS proposal (ex: the aircraft has
to be less than 100m from the virtual path). Thus,
AIBS must inform the pilot about the conditions of
the validity proposal to reduce interpretation errors
and gain trust for tactical decision-making and track
following (ex: best path as long as the pilot is no more
than 5 sec late = low margin of error).
3.3.4 A for Automation
AIBS must treat automatically environmental and
tactical changes to relieve the pilot from considering
changes.
3.3.5 T for Transition
AIBS proposals must tend to be univocal and
understandable to reduce pilot’s doubt and speed up
decision-making.
4 CONCLUSIONS
G.R.E.A.T principles present the benefit of being
justified by real use cases. These principles will
probably evolve as long as ergonomists experiment
new and various use cases.
REFERENCES
Amalberti, R. (1996). La conduite des systèmes à risques.
Paris : PUF.
Bastien, J. M. C., & Scapin, D. L. (1995). Evaluating a user
interface with ergonomics criteria. International Journal
of Human Computer Interaction, 7, 105-121.
Brangier, E., & Robert J.-M. (2014). L'ergonomie
prospective : fondements et enjeux. Le Travail Humain,
77, 1-20. doi: 10.3917/th.771.0001
Guérin, C., Chauvin, C., Leroy, B., & Coppin, G. (2013).
Analyse de la tâche d'un pilote de Rafale à l'aide d'une
HTA étendue à la gestion des modes dégradés.
Communication présentée à la 7ème conférence
Epique, Bruxelles, Belgique. (p.21-26).
Hauret, D. (2010). L’autorité partagée pour mieux décider
à bord du Rafale., Communication présentée à la 12ème
conférence internationale ERGO’IA 10, Bidart, France:
ACM Press
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
94

Hoff, K. A., & Bashir, M. (2015). Trust in automation:
Integrating empirical evidence on factors that influence
trust. Human Factors: The Journal of the Human
Factors and Ergonomics Society, 57, 407–434.
https://doi.org/10.1177/0018720814547570
Lee, J. D., & See, K. A. (2004). Trust in automation:
Designing for appropriate reliance. Human Factors, 46,
50–80. https://doi.org/10.1518/hfes.46.1.50_30392
Lyons, J. B., Ho, N. T., Van Abel, A. L., Hoffmann, L. C.,
Fergueson, W. E., Sadler, G. G., et al. (2018).
“Exploring trust barriers to future autonomy: a
qualitative look,” in Advances in Human Factors in
Simulation and Modeling, Advances in Intelligent
Systems and Computing 591, ed. D. N. Cassenti
(Cham: Springer).
Lyons, J. B., Sycara, K., Lewis, M., & Capiola, A. (2021).
Human–Autonomy Teaming: Definitions, Debates, and
Directions. Front. Psychol. 12:589585. doi:10.3389/
fpsyg.2021.589585
Robert, J-M., & Brangier, E., (2009). « What is prospective
ergonomics? A reflection and position on the future of
ergonomic”, in B.-T. Karsh (Ed.): Ergonomics and
Health Aspects, LNCS 5624, pp. 162–169.
Make Automation G.R.E.A.T (Again)
95
